Изобретение относится к области радиолокационных измерений и предназначено для проверки наличия у воздушного объекта (ВО) траекторных нестабильностей (ТН) движения в виде рысканий планера.
В настоящее время обострилась проблема обеспечения безопасности полетов гражданской и военной авиации. За последние 10 лет общие потери всей государственной авиации России составили более 300 воздушных судов [1]. Число авиационных происшествий на 100000 часов налета в течение последних 30 лет не изменяется и составляет 4-5. В других ведущих авиационных державах этот показатель в 2 раза ниже. Среди других недостатков существующей системы безопасности полетов в [1] особо отмечается отсутствие полной и достоверной информации о состоянии радиоэлектронных систем воздушных судов, аэродинамике их полета и пр. Отмечается также, что авиационные происшествия не бывают следствием проявления какого-либо одного негативного фактора. Обычно они происходят в результате взаимосвязи нескольких таких факторов. Поэтому любая информация о поведении воздушного судна или экипажа является полезной и способствует более качественной организации воздушного движения.
В этой связи необходимо отметить низкие информационные возможности современных аэродромных радиолокационных станций (РЛС). Некоторые из них до сих пор являются двухкоординатными с низкими разрешающими способностями. Поэтому задачу расширения информационных возможностей аэродромных РЛС следует признать актуальной. В частности, аэродромные РЛС не в состоянии оценивать уровень некоторых видов траекторных нестабильностей полета ВО в интересах своевременной выработки рекомендаций экипажам по продолжению полетов или экстренной посадке воздушного судна. Сами же экипажи порой скрывают факты непреднамеренной болтанки самолетов в воздухе по причине возможных подозрений на предмет их некомпетентности или слабой профессиональной подготовленности.
Рассматривая варианты получения информации об уровне ТВ воздушных объектов от наземных РЛС, необходимо отметить, что одним из известных способов внешнего радиолокационного выявления факта наличия ТВ полета воздушного судна является способ, основанный на использовании типовых аэродромных радиолокационных систем посадки РСП-6 или аэродромного посадочного радиолокатора типа АОРЛ-85 [2]. Существо способа заключается в излучении в направлении ВО импульсных сверхвысокочастотных сигналов, приеме отраженных воздушным объектом сигналов, их согласованной фильтрации, усилении, детектировании, выводе полученных видеосигналов на индикаторы курса и глиссады, зрительном сравнении положения середины и краев широкой отметки от воздушного судна с положением середины линии курса и глиссады, нанесенных на индикаторы курса и глиссады посадочной РЛС, а при наличии существенных отклонений - в расчете величины отклонения ВО от линии курса или глиссады и масштабировании результата отклонения [3, с.64-66].
Недостатком данного способа является его низкая точность, зависимость от интеллекта и уровня подготовки оператора РЛС, а также от метеорологических и ландшафтных условий локации. Главным же недостатком такого способа является то, что он пригоден для выявления исключительно высотных и горизонтальных путевых ТН полета и совсем не состоятелен в отношении случайных рысканий планера воздушного судна.
Известен также радиомаячный способ выявления отклонения воздушного судна от линии курса и глиссады [4, с.6-9], который заключается в излучении радиомаячной аэродромной РЛС (курсовым радиомаяком) двух сигналов, направления распространения которых сдвинуты относительно заданной линии курса воздушного судна в левую и правую стороны на единицы градусов, причем эти два сигнала имеют разные частоты амплитудной модуляции (90 Гц и 150 Гц), в приеме в течение интервала Δt бортовым курсовым радиоприемником самолета этих сигналов, их фильтрации, усилении, выделении последовательностей двух разных сигналов с помощью фильтров, настроенных на частоты модуляции каждого из сигналов в отдельности, выявлении из амплитуд этих сигналов коэффициентов глубины модуляции соответствующего сигнала, детектировании каждого сигнала, сравнении (с помощью устройства сравнения) амплитуд продетектированных сигналов, выделении разностного сигнала, амплитуда которого пропорциональна отклонению самолета от заданного курса.
Данный способ не является внешним, требует наличия на борту ВО бортового курсового радиоприемника и при его неисправности не работает. Информацию об отклонении судна от нужного курса диспетчер может получить только с борта самолета по средствам связи.
Сведения о принципах функционирования РЛС системы организации воздушного движения (ОВД) являются широко известными и приведенными, например, в [3, 4, 5 с.534-538].
Необходимо принять во внимание, что постоянный рост интенсивности использования воздушного пространства гражданскими летательными аппаратами определил обоснованную реакцию руководства зарубежных держав по совершенствованию средств радиолокационного обнаружения и сопровождения, входящих в системы противовоздушной обороны (ПВО) и ОВД [6]. За рубежом происходит активная модернизация РЛС в рамках программ интеграции средств контроля воздушного пространства. Это влечет за собой оптимизацию инфраструктуры систем ПВО в США и Западной Европе, создание объединенных радиолокационных постов, оборудования центров и пунктов управления, оснащенных новейшей техникой и аппаратурой отображения информации, локаторов контроля воздушного пространства. Указанные работы финансируются и ведутся по плану NASP (National Air Space Plan) и направлены на модернизацию РЛС, использующих перспективные технологии. При этом одной из основных задач является развитие РЛС двойного назначения. В процессе объединения межведомственных сил и средств радиолокационной разведки, создания радиолокационной системы двойного назначения, по мнению специалистов, появляется возможность решения следующих важных задач:
снижение суммарных затрат Министерства обороны и системы воздушного транспорта (СВТ) на содержание и совершенствование радиолокационных сил и средств;
обеспечение единого понимания воздушной обстановки в органах управления Вооруженных сил и системы ОВД;
уменьшение типажа и унификация радиоэлектронных средств, комплексов средств автоматизации, средств связи, создание единых стандартов их сопряжения;
обеспечение радиоэлектронной совместимости средств радиолокации и связи видов Вооруженных сил и СВТ в районах совместного базирования.
Анализ работ, проводимых для совершенствования систем ПВО США, объединенных и национальных систем ПВО в странах НАТО позволяет сделать вывод, что основным направлением их развития является создание интегрированных систем обнаружения и управления, позволяющих максимально реализовать потенциальные возможности всех входящих в них сил и средств. Созданная в США единая система наблюдения за воздушным пространством (JSS) включает 53 радиолокационных поста, в том числе 10 аэростатных. Из них 37 наземных постов находятся в эксплуатации Федерального управления гражданской авиации (ФУГА) и используются для одновременного решения задач ПВО и ОВД, а 9 аэростатных постов принадлежат таможенной службе и береговой охране США. Ввод в действие совместных постов ПВО-ОВД снизил почти вдвое стоимость их эксплуатации и устранил дублирование в работе систем ПВО и ФУГА [6].
В западной Европе управление силами и средствами радиолокационного контроля пространства, сбор, обработка и оценка данных о воздушной обстановке осуществляется с помощью автоматизированной системы управления (АСУ) "Нейдж", которая сопряжена с АСУ стран блока НАТО. Для ведения непрерывной радиолокационной разведки воздушного пространства используются РЛС центров управления и оповещения, постов наблюдения и оповещения, мобильные радиолокационные роты, выдающие информацию на центры и посты оповещения системы "Ларс", а также РЛС береговых постов наблюдения и оповещения, которые предназначены для обнаружения низколетящих ВО и надводных кораблей. Контроль воздушного пространства осуществляется не только наземными РЛС, но и с привлечением самолетов дальнего радиолокационного наблюдения типа Е-3А «AWACS».
Руководство западных стран уделяет развитию РЛС огромное внимание. В частности, продолжаются разработки РЛС типа ARSR-4 нового поколения, выполняющих функции трассовых и аэродромных терминалов, используемых в системах ПВО. В качестве примера перспективного радиолокатора можно привести также западногерманскую РЛС типа TRMS с фазированной антенной решеткой, предназначенную для обнаружения, сопровождения, опознавания ВО в условиях помех и решения задач ОВД. Она может входить в системы объектовой, войсковой ПВО и ОВД, а выполняться в стационарном, транспортируемом и мобильном вариантах.
В рамках проблемы создания объединенных радиолокационных постов и совершенствования РЛС двойного назначения нельзя не отметить успешные испытания прототипа универсального мобильного центра управления средствами разведки и связи (ЦУСРС), проведенные в США [7]. В ходе такого эксперимента для построения информационно-разведывательного компонента объединенной группировки ПВО были привлечены 5 РЛС управления гражданской авиации, бортовая РЛС крейсера «Йорктаун» и самолет управления военно-воздушных сил Е-3А «AWACS». Данные от них передавались на ЦУСРС, где комплексировались и в виде объединенной информации передавались на командный пункт юго-восточного сектора ПВО. Такое комплексное использование возможностей нескольких РЛС позволило сформировать многоярусное радиолокационное поле для сопровождения ВО на любых высотах, т.е. практически проверить способность системы к решению задач достижения информационного превосходства.
Таким образом, в условиях отсутствия в системе ОВД высокоинформативных РЛС сопровождения, роль посадочных РЛС могут выполнять типовые локаторы сопровождения [5, 8], в том числе и военного назначения.
Однако даже такие РЛС не ориентированы на решение задач определения факта рысканий планера ВО при полете в турбулентной атмосфере. Эти РЛС могут использоваться только для определения простейших видов ТН, к которым относятся изменение высоты, горизонтального положения и путевой скорости [9, с.110-113]. В связи с вышеизложенным следует считать, что известен способ внешнего радиолокационного выявления факта наличия ТН полета у ВО [10], заключающийся в том, что в направлении ВО излучают сверхвысокочастотные зондирующие сигналы, принимают отраженные от ВО сигналы, понижают частоту принятых сигналов до промежуточной, проводят их согласованную фильтрацию, усиливают принятые сигналы на промежуточной частоте, выделяют сигналы рассогласования по угловым координатам и дальности, с помощью выделяемых из каждого импульса сигналов рассогласования по угловым координатам и дальности осуществляют автоматическое сопровождение ВО по угловым координатам и дальности, детектируют принятые радиоимпульсы промежуточной частоты, а именно выделяют с помощью квадратурных фазовых детекторов квадратурные составляющие принимаемых сигналов, проводят узкополосную доплеровскую фильтрацию принятых сигналов, в результате которой измеряют доплеровскую частоту отраженных сигналов и радиальную скорость ВО, в процессе автоматического сопровождения ВО периодически измеряют дальность D, угол места ε, азимут β и радиальную скорость ВО, а также периодически через каждую секунду вычисляют высоту Н объекта по формуле H=Dsinε, где D - наклонная дальность до ВО, а также периодически через 1 секунду вычисляют пройденный объектом путь и рассчитывают путевую скорость Vп по формуле Vп=ΔL/Δt, где ΔL - изменение пространственных координат ВО за интервал времени Δt, сравнивают периодически вычисляемые значения высоты Н между собой и при изменениях высоты фиксируют факт наличия высотной нестабильности полета, сравнивают периодически вычисляемые значения путевой скорости Vп и при изменениях путевой скорости фиксируют факт наличия скоростной нестабильности полета ВО, пересчитывают сферические координаты ВО (ε, β, D) в декартовы (x, y, z), сравнивают периодически вычисляемые координаты перемещения ВО в горизонтальной плоскости XY и при отклонении ВО от прямолинейной траектории фиксируют нестабильность его перемещения в горизонтальной плоскости.
Данный способ не зависит от степени исправности радиоэлектронной аппаратуры на борту ВО, является внешним, автономным и надежным. Однако отмеченный способ может фиксировать лишь высотные, скоростные и горизонтальные нестабильности полета воздушного объекта, да и то лишь в случае, если значения этих ТН превышают разрешающие способности РЛС по измерению пространственных координат, скорости и высоты. Это простейшие виды ТН полета, наличие которых можно фиксировать даже самыми грубыми известными способами измерения параметров движения ВО [3, 5, 8].
Более важные (не доступные для простых методов) виды ТН полета, к числу которых относятся случайные изменения крена, тангажа и курса ВО [9], с помощью способа-прототипа не выявляются. А случайные изменения курса, проявляющиеся в виде рысканий планера ВО, также могут служить причиной авиапроисшествий. Бортовая аппаратура воздушного судна с помощью гироскопических датчиков, датчиков угловых скоростей и акселерометров способна регистрировать рыскания планера. Однако при возникновении неисправностей бортовой аппаратуры и в других экстраординарных ситуациях возникает необходимость устанавливать факт и степень рысканий планера ВО извне, т.е. с помощью внешнего радиолокатора. Такие задачи существующие РЛС решать не могут.
Целевой функцией изобретения является обеспечение возможности выявления факта наличия ТН полета в виде рысканий планера ВО с помощью анализа отраженных сигналов внешней наземной аэродромной РЛС.
Для достижения поставленной цели предлагается выделять из отраженных от ВО сигналов сигналы рассогласования по угловым координатам и дальности. Сигналы рассогласования обеспечивают автоматическое сопровождение ВО по углу места ε, азимуту β и дальности D известными способами [5, 8]. После приема каждого отраженного от ВО сигнала и проведения его согласованной фильтрации на промежуточной частоте аналогично способу-прототипу предлагается проводить с помощью квадратурного фазового детектора детектирование принятых радиоимпульсов промежуточной частоты для выделения квадратурных составляющих принимаемых сигналов. Операция фазового детектирования и разделения сигналов на квадратурные составляющие является широко известной в радиолокации [5, 8]. В результате детектирования сигнал разлагается на синусную и косинусную составляющие. В соответствии с замыслом изобретения после выделения синусной и косинусной составляющих предлагается с помощью аналого-цифрового преобразователя (АЦП) проводить их преобразование в цифровую форму. Знание величин квадратурных составляющих тождественно знанию амплитуды и фазы отраженных сигналов. Причем для выделения фазовой информации об объекте оцифровывать пик (максимум) отклика согласованного фильтра на отраженный сигнал необходимо именно в квадратурных каналах фазового детектора, что позволяет с помощью АЦП получать цифровое значение синусной (Im) и косинусной (Re) составляющих сигнала. Из значений оцифрованных синусной и косинусной квадратурных составляющих отраженных сигналов предлагается формировать и запоминать в памяти оперативного запоминающего устройства массив данных M из S столбцов и двух строк (фиг.1), причем столбцы следуют в порядке приема, а данные в них принадлежат одному и тому же сигналу.
Массив М имеет вид

где  и
и  - соответственно действительная (косинусная) и мнимая (синусная) составляющие отраженного сигнала в пике отклика фильтра на комплексный s-й отраженный сигнал
- соответственно действительная (косинусная) и мнимая (синусная) составляющие отраженного сигнала в пике отклика фильтра на комплексный s-й отраженный сигнал  .
.
Как следует из фиг.1, в каждый s-й столбец массива М записывают информацию о синусной Im (во вторую строку) и косинусной Re (в первую строку) составляющих s-го сигнала из S принятых сигналов.
Число столбцов S массива М определяется выражением S=Тн/Ти, где Тн - время запоминания (т.е. накопления) отраженных сигналов в запоминающем устройстве, Ти - период повторения импульсов РЛС. Время Тн должно составлять величину порядка 5-6 секунд для того, чтобы на этом интервале умещалось несколько лепестков отражательной характеристики ВО самых минимальных размеров, а также для того, чтобы на этом интервале можно было сформировать информативную последовательность доплеровских спектров ВО по отраженным от него сигналам.
Затем предлагается из созданного (запомненного в памяти запоминающего устройства) массива М выбрать N первых членов синусной и соответствующих N первых членов косинусной составляющих отраженного сигнала, т.е. выбрать из этого массива N первых столбцов, а затем сформировать из них первый частный массив (частную выборку) комплексного отраженного сигнала. Данные этого частного массива (частной выборки) предлагается подвергнуть операции быстрого преобразования Фурье (БПФ). Причем число N выбирается из условия N=2k, где k=6…10. Результатом такой обработки является массив, выражающий первый частный доплеровский портрет ВО [11]. Параметры этого первого доплеровского портрета (ДП), как и параметры всех последующих ДП, запоминаются в оперативном запоминающем устройстве (ОЗУ) РЛС.
Далее необходимо произвести сдвиг на один отсчет в массиве данных М. После этого второй частный массив из N комплексных величин может быть сформирован также из значений N столбцов массива М, только начиная с его 2-го столбца и заканчивая его же (N+1)-м столбцом. С этой второй частной выборкой также следует провести операцию БПФ, получить второй ДП и запомнить его в ОЗУ. Так, поэлементно сдвигая выборку квадратур (Re и Im) отраженных сигналов, из данных массива М необходимо последовательно формировать серию доплеровских портретов ВО и запомнить цифровые значения каждого ДП в памяти ОЗУ РЛС. Число ДП в формируемой серии будет равно (S-N+1).
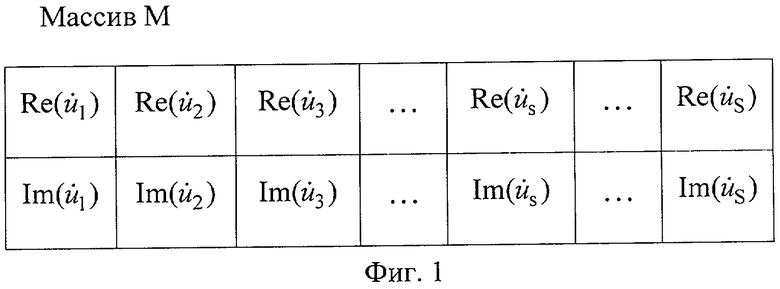
Затем предлагается сравнивать структуру полученных ДП между собой. Самым простым способом сравнения является сравнение ДП по ширине, т.е. по протяженности. Для этого в структуре ДП находят точки максимумов спектральных составляющих (фиг.2). Затем выделяют среди них левый и правый спектральные максимумы и находят частотное расстояние между ними ΔF. Для примера на фиг.2 показан ДП самолета Ил-86, полученный методом математического моделирования при курсовом угле 10°, высоте полета 1 км, дальности 30 км, средней угловой скорости рыскания 1,5°/с при длительности интервала синтезирования (длительности частной выборки) Тс=0,49 с. Если в структуре ДП будет всего одна спектральная составляющая, то протяженность ΔF такого портрета принято считать нулевой.
Из протяженностей последовательно проанализированных ДП формируют массив данных. Потом проводят анализ этого массива, преследуя цель выявления степени изменения протяженности ДП с течением времени. Если протяженность ДП не изменяется, принимают решение, что ВО движется стабильно. При изменениях в протяженности ДП принимают решение, что ВО испытывает случайные колебания, планер ВО рыщет в атмосфере, т.е. полет ВО проходит с ТН.
Поскольку любая операция с выборкой отраженных сигналов характеризуется определенной ошибкой, то ДП в пределах интервала Тн не могут быть абсолютно идентичными. Поэтому при сравнении протяженностей ДП используют некоторое пороговое критическое значение, определяемое экспериментально. Превышение этого значения выступает в качестве критерия наличия ТН в виде рысканий планера ВО.
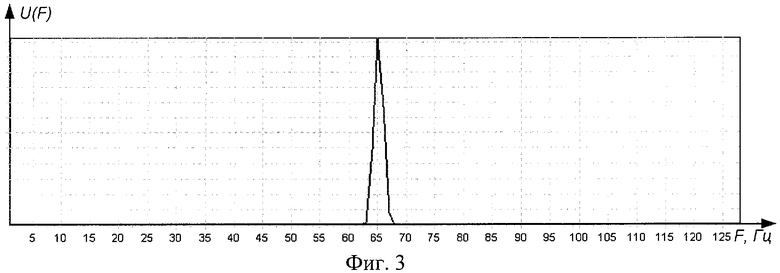
Сущность изобретения состоит в следующем. При локации ВО, который движется радиально или с малым курсовым углом, получение информативного ДП методом инверсного радиолокационного синтезирования апертуры (ИРСА) [12] невозможно. Этот объясняется тем, что при радиальном движении ВО его ракурс относительно РЛС не меняется. Поэтому не возникает вторичный доплеровский эффект [13], и планерная составляющая в формируемом ДП имеет один единственный максимум (фиг.3), т.е. не разделяется на отдельные лепестки по числу рассеивателей на поверхности ВО в поперечном относительно линии визирования направлений.
Если же во время движения ВО испытывает давление со стороны бокового ветра, то возникают ТН полета, и планер самолета кроме горизонтальных сносов влево и вправо начинает рыскать в атмосфере. При этом соответствующим образом изменяется ракурс ВО относительно РЛС. А если ракурс ВО изменяется, то возникают условия для реализации принципа ИРСА. Алгоритмы ИРСА являются изученными [14, 15] и апробированными. В частности, известно, что с ростом угловой скорости поворота ВО относительно РЛС ширина ДП воздушного объекта увеличивается и наоборот. При квазипериодических рысканиях планера ВО угловая скорость поворота  постоянно нелинейно меняется. В серединах полупериодов рысканий она максимальна, в точках смены направления вращения она равна нулю. Средняя угловая скорость поворота
постоянно нелинейно меняется. В серединах полупериодов рысканий она максимальна, в точках смены направления вращения она равна нулю. Средняя угловая скорость поворота  может быть рассчитана по формуле
может быть рассчитана по формуле  где
где  - максимальная угловая скорость поворота ВО в середине полупериода рыскания. Связь амплитуды рысканий А с периодом рысканий планера Тр выражается зависимостью
- максимальная угловая скорость поворота ВО в середине полупериода рыскания. Связь амплитуды рысканий А с периодом рысканий планера Тр выражается зависимостью 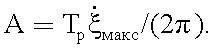
Таким образом, последовательно формируя ДП, смещенные во времени, при изменениях угловой скорости поворота будет соответствующим образом изменяться структура ДП, а именно - его протяженность, зависящая от средней скорости поворота ВО на интервале ИРСА Тс. Интервал синтезирования Тс определяется числом элементов N частной выборки и периодом повторения Ти импульсов РЛС: Тс=(N-1)Ти. Опыт формирования ДП ВО позволяет рекомендовать для предлагаемого способа интервал ИРСА Тс≈0,3 с. Поскольку периоды рысканий ВО составляют величины порядка 3-5 с, на рекомендуемом интервале накопления Тн гарантированно проявятся изменения протяженности ДП, если ВО имеет ТН в виде рысканий.
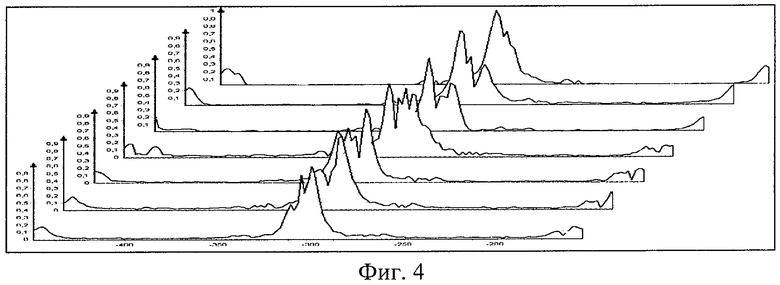
Факт изменения протяженности ДП с течением времени при наличии ТН полета ВО подтвержден в ходе натурных экспериментов, проведенных на учебном полигоне Военной академии войсковой противовоздушной обороны Вооруженных сил Российской Федерации с помощью типовой когерентно-импульсной РЛС сопровождения. В экспериментах использовался самолет Ил-76, который двигался на высоте 1,8 км с радиальной скоростью 80 м/с на удалении 64 км. Его ДП, показанные на фиг.4, получены на интервалах синтезирования Тс=0,5 с со смещением между моментами начала синтезирования 0,1 с.
Судя по структуре доплеровских портретов, воздушный объект из двухточечного через 0,3 с превращается в четырехточечный, а затем через 0,4 с снова возвращается к двухточечному варианту. На самом деле количество рассеивающих центров на планере ВО во всех использованных угловых положениях одинаково, но за счет изменения возможности по поперечному (вторичному доплеровскому) разрешению меняются. Самый сложный ДП имеет протяженность 20 Гц. Значит, при длине самолета Ил-76, равной 47 м, и при расстояниях между крайними двигателями 25 м, он имел в середине полупериода рысканий угловую скорость поворота порядка 0,8-0,9°/с. Эта угловая скорость почти полностью определялась ТН (рысканиями) полета.
Ограничение, связанное с малым курсовым углом перемещения ВО, является, во-первых, обоснованным, а во-вторых, не отвергающим возможность реализации способа в аэродромных РЛС. Обоснованность заключается в том, что при курсовом угле более 20° изменения структуры ДП могут быть следствием изменения ракурса ВО при прямолинейном перемещении его центра масс. Тогда признак выявления факта наличия ТН перестает обладать однозначностью, т.е. теряет свою эффективность. Что касается узкого диапазона применения способа по курсовому углу, то следует учесть, что способ необходим и планируется к реализации только в посадочных аэродромных РЛС, а для таких РЛС все ВО, начиная с некоторой дальности, имеют малые курсовые углы по отношению к локаторам, расположенным на аэродромах.
Как видно из описания, предлагаемый способ прост в реализации, но достаточно эффективен, поскольку аппарат формирования ДП ВО позволяет получать разрешающую способность по частоте Доплера порядка единиц Герц. При такой разрешающей способности вполне достижимо выявление факта наличия ТН, так как угловые скорости рысканий планера ВО также исчисляются величинами порядка единиц Герц. Способ предоставляет диспетчерским службам аэропортов незаменимую информацию о степени устойчивости (стабильности) положения движущегося воздушного судна при заходе на взлетно-посадочную полосу или при обычном полете с малым курсовым углом перемещения.
Источники информации
1. Байнетов С.Д. Безопасностью полетов нужно управлять // Возушно-космическая оборона, 2008. №3 (40). С.60-67.
2. Бабуров В.И., Колесников А.К., Столяров Г.В. Проблемы ближней навигации // Возушно-космическая оборона, 2008. №3 (40), с.109-113.
3. Олиференко Г.И. Радиотехнические средства управления воздушным движением. Посадочные радиолокаторы. Учебное пособие. - Ленинград: Академия гражданской авиации, 1975. 102 с. (с.64-66 аналог).
4. Кожухарь Е.Л., Сосновский А.А., Хаймович И.А. Особенности эксплуатации радиомаячных систем посадки самолетов. - М.: Транспорт, 1982. 184 с. (с.6-9 аналог).
5. Радиолокационные устройства (теория и принципы построения) / Под ред. В.В.Григорина-Рябова. - М.: Сов. Радио, 1970, 680 с.
6. Гришулин С.В. Современные радиолокационные средства ПВО армий зарубежных стран // Зарубежное военное обозрение, 1998. №3. С.24-28.
7. Дорофеев В.Н. Испытания информационного компонента объединенной системы ПРО и ПВО экспедиционной группировки ВС США // Зарубежное военное обозрение, 2001. №10. С.36-37.
8. Радиотехнические системы / Под ред. Ю.М.Казаринова. - М.: Высшая школа, 1990. 496 с.
9. Радиолокационные станции воздушной разведки / Под ред. Г.С.Кондратенкова. - М.: Воениздат, 1983, 152 с.
10. Радиолокационные устройства (теория и принципы построения) / Под ред. В.В.Григорина-Рябова. - М.: Сов. Радио, 1970, с.334-363, 573, рис.13.2 (прототип).
11. Митрофанов Д.Г. Комплексный адаптивный метод построения радиолокационных изображений в системах управления двойного назначения // Теория и системы управления. Известия РАН, 2006, №1, с.101-118.
12. Стайнберг Б.Д. Формирование радиолокационного изображения самолета в диапазоне СВЧ // ТИИЭР, 1988. №12. Т.76. С.26-46.
13. Финкельштейн М.И. Основы радиолокации. - М.: Радио и связь, 1983, 536 с.
14. Митрофанов Д.Г., Прохоркин А.Г., Нефедов С.И. Измерение габаритов летательных аппаратов в условиях турбулентности на основе инверсного синтезирования апертуры // Измерительная техника, 2008, №8, с.24-28.
15. Радиоэлектронные системы. Справочник. Основы построения и теория / Под ред. Я.Д.Ширмана. - М.: Радиотехника. 2007, 510 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВНЕШНЕГО РАДИОЛОКАЦИОННОГО ВЫЯВЛЕНИЯ ФАКТА НАЛИЧИЯ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА У ВОЗДУШНОГО ОБЪЕКТА ПО СТРУКТУРЕ ЕГО ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКИ | 2014 |
|
RU2562060C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ МАЛОРАЗМЕРНОГО ВОЗДУШНОГО ОБЪЕКТА В ВИДЕ РАДИАЛЬНОГО УСКОРЕНИЯ ДВИЖЕНИЯ ДЛЯ РЕЖИМА СОПРОВОЖДЕНИЯ С ИСПОЛЬЗОВАНИЕМ СИГНАЛОВ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2392640C1 |
| СПОСОБ ВЫБОРА ПОЛОЖЕНИЯ ИНТЕРВАЛА ИНВЕРСНОГО СИНТЕЗИРОВАНИЯ АПЕРТУРЫ ПРИ НАЛИЧИИ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА ВОЗДУШНОГО ОБЪЕКТА С ВОЗМОЖНОСТЬЮ ОЦЕНКИ УГЛОВОЙ СКОРОСТИ ЕГО ПОВОРОТА ОТНОСИТЕЛЬНО РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2009 |
|
RU2409823C1 |
| СПОСОБ ВЫБОРА ИНТЕРВАЛА ИНВЕРСНОГО СИНТЕЗИРОВАНИЯ С РАССЧИТЫВАЕМОЙ УГЛОВОЙ СКОРОСТЬЮ ПОВОРОТА ЦЕЛИ ОТНОСИТЕЛЬНО РАДИОЛОКАТОРА | 2007 |
|
RU2360267C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КЛАССИФИКАЦИИ ВИБРИРУЮЩИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ПОЛЕТА В ПРИЗЕМНЫХ СЛОЯХ АТМОСФЕРЫ | 2009 |
|
RU2407031C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОЙ ПРОВЕРКИ ИНФОРМАЦИОННЫХ И ИДЕНТИФИКАЦИОННЫХ ВОЗМОЖНОСТЕЙ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571957C1 |
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ПО ТРАЕКТОРНЫМ НЕСТАБИЛЬНОСТЯМ ЕЕ ПОЛЕТА | 2000 |
|
RU2180445C2 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНОГО РАДИОЛОКАЦИОННОГО ОБЪЕКТА НАБЛЮДЕНИЯ С ВЫБОРОМ ИНТЕРВАЛА МАКСИМИЗАЦИИ УГЛОВОЙ СКОРОСТИ ЕГО ПОВОРОТА ПРИ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЯХ ДВИЖЕНИЯ | 2010 |
|
RU2427001C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ВЫЯВЛЕНИЯ ЗАКОНА ИЗМЕНЕНИЯ УГЛОВОЙ СКОРОСТИ ПОВОРОТА СОПРОВОЖДАЕМОГО ВОЗДУШНОГО ОБЪЕКТА ПО ПОСЛЕДОВАТЕЛЬНО ПРИНЯТЫМ ОТРАЖЕНИЯМ СИГНАЛОВ С ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ | 2013 |
|
RU2525829C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2007 |
|
RU2348053C1 |
Заявленный способ относится к области радиолокационных измерений и предназначен для проверки наличия у воздушного объекта траекторных нестабильностей движения в виде рысканий планера. Сущность изобретения основана на изучении динамики протяженности доплеровских портретов, сформированных в последовательные моменты времени. Для этого оцифрованные значения квадратурных составляющих отраженных сигналов помещают в массив данных, из которого впоследствии извлекают частные массивы квадратур для формирования доплеровских портретов. Признаком наличия траекторных нестабильностей полета в виде рысканий выступает изменение структуры формируемых доплеровских портретов воздушного объекта, что обусловлено изменением угловой скорости поворота относительно радиолокационной станции при рысканиях планера. Методом формирования доплеровских портретов является процедура быстрого преобразования Фурье над частной выборкой отражательной характеристики объекта. Достигаемым техническим результатом изобретения является повышение надежности возможности выявления факта наличия траекторных нестабильностей полета у воздушного объекта с малым курсовым углом перемещения. 4 ил.
Способ внешнего радиолокационного выявления факта наличия траекторных нестабильностей полета воздушного объекта с малым курсовым углом перемещения, заключающийся в том, что в направлении воздушного объекта излучают сверхвысокочастотные воздушные сигналы, принимают отраженные от воздушного объекта сигналы, понижают частоту принимаемых сигналов до промежуточной, проводят согласованную фильтрацию принимаемых сигналов, усиливают принятые сигналы на промежуточной частоте, выделяют сигналы рассогласования по угловым координатам и дальности, с помощью выделяемых из каждого импульса сигналов рассогласования по угловым координатам и дальности осуществляют автоматическое сопровождение воздушного объекта по углу места ε, азимуту β и дальности D, детектируют принятые радиоимпульсы промежуточной частоты, а именно выделяют с помощью квадратурных фазовых детекторов квадратурные составляющие принимаемых сигналов, отличающийся тем, что после выделения квадратичным фазовым детектором квадратурных составляющих каждого отраженного сигнала проводят с помощью аналого-цифрового преобразователя перевод этих квадратурных составляющих в цифровую форму в точке максимума отклика согласованного фильтра на принятый сигнал, формируют из значений оцифрованных квадратурных составляющих отраженных сигналов двумерный массив М из S столбцов и двух строк, в каждый s-й столбец которого записывают информацию о синусной и косинусной составляющих принятого s-го сигнала из S сигналов, принятых за интервал времени накопления Тн, составляющий 5-6 с, причем число S выражается формулой S=Тн/Ти, где Ти - период следования импульсных сигналов, выбирают из созданного, запомненного в памяти запоминающего устройства, массива М N первых столбцов и формируют из них первый частный двумерный массив данных, где N=2k, k=6…10, проводят в массиве М сдвиг на один отсчет, чтобы на втором шаге сформировать второй частный массив данных из значений массива М, начиная со второго столбца и заканчивая (N+1)-м столбцом массива М, и так далее до формирования последнего частного массива из N столбцов, начиная с (S-N+1)-го столбца и заканчивая S-м столбцом массива М, методом быстрого преобразования Фурье получают из комплексных данных каждого частного массива доплеровский портрет воздушного объекта, то есть формируют последовательно (S-N+1) доплеровских портретов, запоминая цифровые значения каждого из (S-N+1) доплеровских портретов в памяти оперативного запоминающего устройства, находят в каждом доплеровском портрете точки максимумов амплитуд спектральных составляющих, определяют протяженность каждого доплеровского портрета как расстояние в пикселях между положением на оси абсцисс крайнего левого спектрального максимума и крайнего правого спектрального максимума, в случае единственности максимума считают протяженность доплеровского портрета равной нулю, сравнивают протяженности сформированных доплеровских портретов между собой, в случае, если протяженности доплеровских портретов не превышают порогового критического значения, обусловленного точностью измерений, влиянием шумов и других негативных факторов, принимают решение об отсутствии траекторных нестабильностей полета у воздушного объекта, а в случае, если различия в протяженностях доплеровских портретов превышают пороговое критическое значение, принимают решение о наличии траекторных нестабильностей полета воздушного объекта в виде рысканий его планера по курсу.
| Радиолокационные устройства./ Под ред | |||
| ГРИГОРИНА-РЯБОВА В.В | |||
| М.: Советское Радио, 1970, с.334-363, 573, рис.13.2 | |||
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 1995 |
|
RU2099744C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ВОЗДУШНОЙ ЦЕЛИ В РЕЖИМЕ ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2007 |
|
RU2326402C1 |
| СПОСОБ МНОГОМЕРНОГО ТРАЕКТОРНОГО СОПРОВОЖДЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2306581C1 |
| US 2008031213 A1, 07.02.2008 | |||
| US 5422829 A, 06.06.1995 | |||
| WO 2005062984 A2, 14.07.2005 | |||
| US 5442364 A, 15.08.1995. | |||

