Изобретение относится к вибрационной технике и может быть использовано в вибрационных машинах, применяемых в строительстве, транспорте, металлообработке, станкостроении, горной и других отраслях промышленности, где используется вибрация.
Известен способ возбуждения колебаний (см. в кн. Вибрации в технике: справочник в 6 т. Т.4: Вибрационные процессы и машины / Г.Г.Азбель, И.И.Блехман, И.И.Быховский и др.; под ред. Э.Э.Лавендела. - М.: Машиностроение, 1981. - С.468-469), заключающийся в том, что дебаланс, имеющий заданные массу и эксцентриситет, принудительно вращают с постоянной угловой скоростью. При этом неуравновешенная масса дебаланса создает вращающуюся центробежную силу.
Недостатком данного способа является низкая эффективность применения вследствие малых возможностей регулирования параметров колебаний, в частности невозможность изменения вынуждающей силы без изменения конструктивных элементов и равенство частоты колебаний дебаланса частоте их вращения, поэтому применение способа ограничивается использованием его в одном конкретном вибрационном устройстве для выполнения конкретных операций.
Известен способ возбуждения круговых колебаний (см. А.с. 1664412 СССР, МКИ3 В06В 1/15. Способ возбуждения круговых колебаний и устройство для его осуществления / С.Г.Лакирев, Я.М.Хилькевич, С.В.Сергеев. - №4414912/24-28; заявл. 24.04.88; опубл. 23.07.91, Бюл. №27. - 10 с.), который заключается в том, что вращаемое тело сопрягают с контртелом тарированной силой прижима и обкатывают его по замкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, при этом частотой колебательных движений управляют по соотношению

а их амплитудой - по соотношению
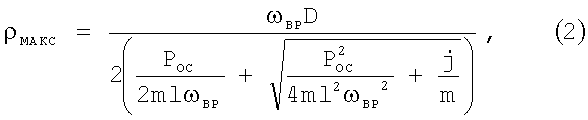
где РОС - величина осевой тарированной силы прижима вращаемого тела к контртелу;
ωВР - частота вращения вращаемого тела;
m - масса вращаемого тела;
l - вылет вращаемого тела;
j - жесткость стержня вращаемого тела;
D - диаметр вращаемого тела в зоне его сопряжения с контртелом.
Недостатком данного способа, взятого за прототип, является низкая эффективность применения, так как вследствие зависимости амплитуды и частоты возбуждаемых колебаний от частоты вращения вращаемого тела для расширения диапазона воспроизводимых частот требуется, как правило, уникальный высокоскоростной привод вращения вращаемого тела.
Задачей, на решение которой направлено заявляемое изобретение, является повышение эффективности за счет расширения возможностей регулирования частоты и амплитуды возбуждаемых колебаний.
Для решения поставленной задачи предлагаются следующий способ возбуждения колебаний.
1. Способ возбуждения колебаний, заключающийся в том что, вращаемое тело сопрягают торцовой поверхностью с контртелом тарированной силой прижима и обкатывают его по замкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, отличающийся тем, что одновременно с вращаемым телом в разных направлениях вращают контртело вокруг оси собственной симметрии.
2. Способ по п.1, отличающийся тем, что вращаемое тело сопрягают торцовой поверхностью со вторым вращаемым телом, расположенным с имеющимся телом на одной оси, причем оба вращаемых тела одновременно вращают с различными угловыми скоростями и в разных направлениях.
Сравнение заявленного способа возбуждения колебаний с известными позволяет сделать вывод о достижении нового эффекта, выразившегося в расширении возможностей регулирования частоты и амплитуды возбуждаемых колебаний. Это стало возможным за счет применения в механизме возбуждения колебаний независимого принудительного вращения контртела и применения второго вращаемого тела, причем это вращение осуществляется одновременно с вращением имеющегося тела в разных направлениях, то есть благодаря техническим приемам и конструкционным связям, что позволяет сделать вывод о соответствии критерию «изобретательский уровень».
Сущность изобретения поясняется чертежами, где
на фиг.1а) показана схема колебательной системы с вращаемым контртелом с плоской поверхностью сопряжения (ψ=180°);
на фиг.1б) - схема колебательной системы с вращаемым контртелом с конической поверхностью сопряжения (ψ<180°);
на фиг.1в) - схема движения центра тяжести вращаемого тела при выбеге;
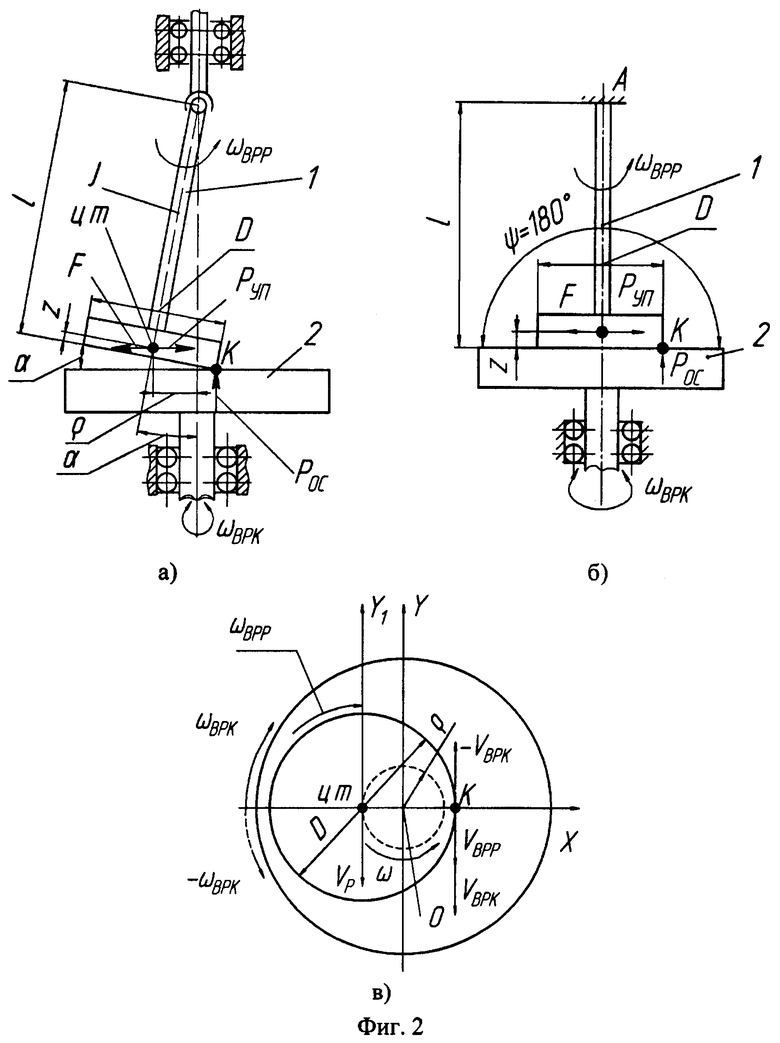
на фиг.2а) - динамическая расчетная схема колебательной системы с вращаемым контртелом (ψ=180°);
на фиг.2б) - статическая расчетная схема колебательной системы с вращаемым контртелом (ψ=180°);
на фиг.2в) - кинематическая расчетная схема колебательной системы с вращаемым контртелом (ψ=180°);
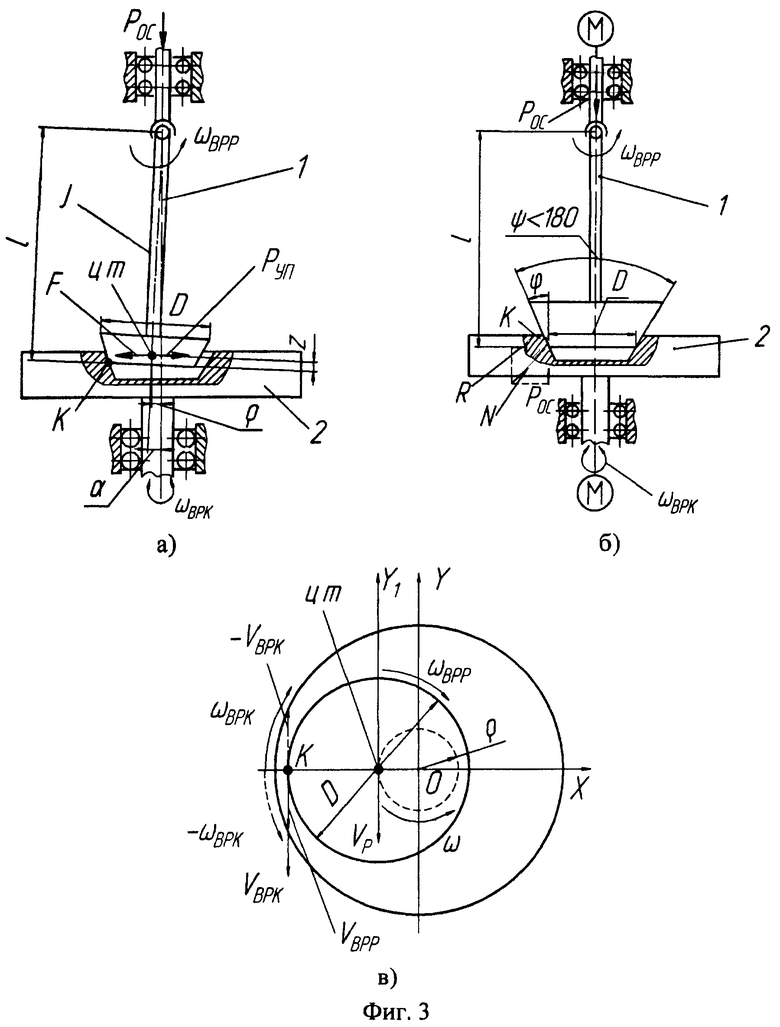
на фиг.3а) - динамическая расчетная схема колебательной системы с вращаемым контртелом (ψ<180°);
на фиг.3б) - статическая расчетная схема колебательной системы с вращаемым контртелом (ψ<180°);
на фиг.3в) - кинематическая расчетная схема колебательной системы с вращаемым контртелом (ψ<180°);
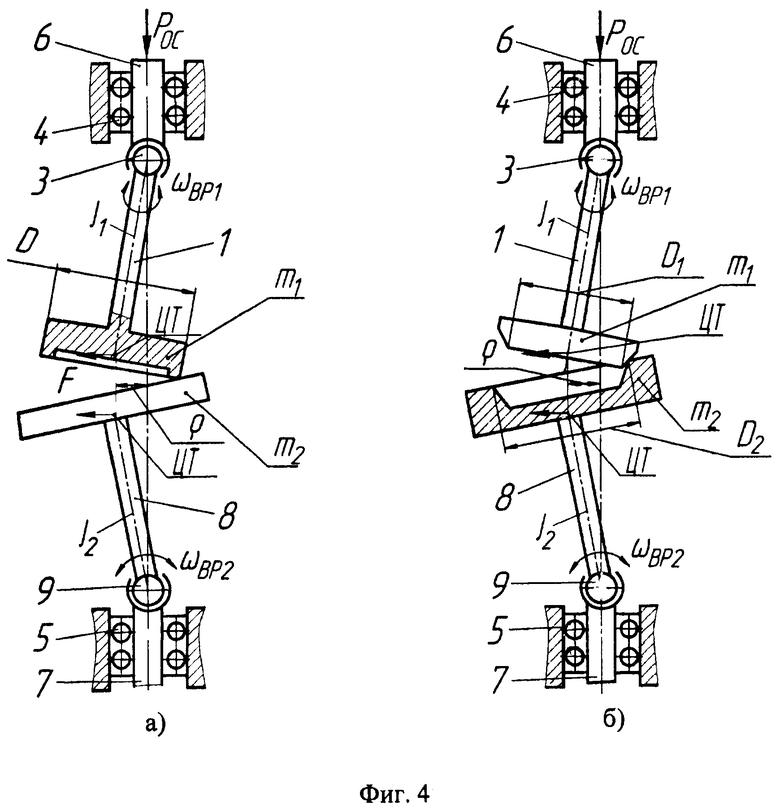
на фиг.4а) - схема колебательной системы с двумя вращаемыми телами с плоской поверхностью сопряжения (ψ=180°);
на фиг.4б) - схема колебательной системы с двумя вращаемыми телами с конической поверхностью сопряжения (ψ≠180°);
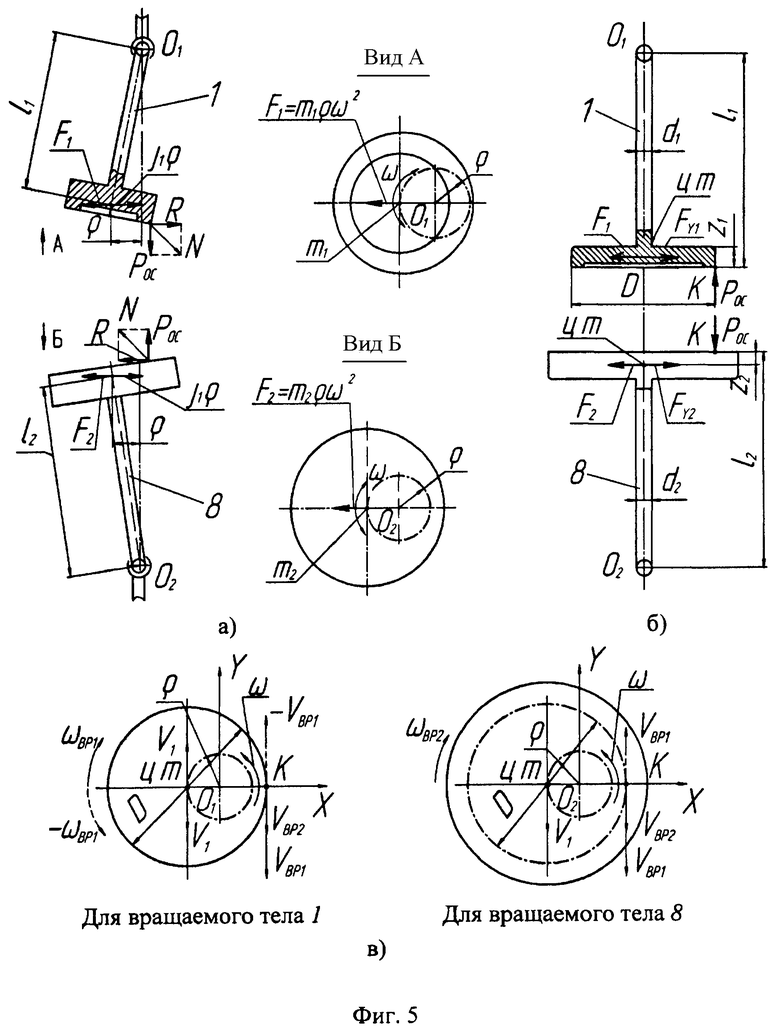
на фиг.5а) - динамическая расчетная схема колебательной системы с двумя вращаемыми телами (ψ=180°);
на фиг.5б) - статическая расчетная схема колебательной системы с двумя вращаемыми телами (ψ=180°);
на фиг.5в) - кинематические расчетные схемы колебательной системы с двумя вращаемыми телами (ψ=180°);
на фиг.6а) - динамическая расчетная схема колебательной системы с двумя вращаемыми телами (ψ≠180°);
на фиг.6б) - статическая расчетная схема колебательной системы с двумя вращаемыми телами (ψ≠180°);
на фиг.6в) - кинематические расчетные схемы колебательной системы с двумя вращаемыми телами (ψ≠180°).
Способ возбуждения колебаний по п.1 (фиг.1а), б)) заключается в том, что вращаемое тело 1, установленное в подшипниках качения 4, перемещают в осевом направлении и поджимают тем самым торцовой поверхностью с требуемым тарированным осевым усилием POC>0 к контртелу 2, установленному в подшипниках качения 5. Затем от приводов М вращения через приводной вал 6 и жесткую муфту, либо упругий элемент качания 3 осуществляется вращение вращаемого тела с частотой вращения ωBPP, а через приводной вал 7 и вращение в различных направлениях контртела с частотой вращения ωВРК. В результате происходит смещение продольной оси вращаемого тела (в плоскости контакта с контртелом) от оси поворотной симметрии на величину ρ с последующим (в установившемся режиме) планетарным обкатыванием вращаемого тела по поверхности сопряженного с ним контртела. При этом кинематически неуравновешенный центр тяжести вращаемого тела совершает круговые поперечные колебания с амплитудой ρ (фиг.1 в)) вокруг оси своей поворотной симметрии. Таким образом, кинематически неуравновешенная масса вращаемого тела создает вращающуюся центробежную силу, которая вызывает колебания всей системы.
Торцовые поверхности сопряжения вращаемого тела и контртела могут иметь как плоскую (см. фиг.1а)), так и коническую форму (см. фиг.1б)).
Параметры данных колебаний при этом будут зависеть еще от направления и частоты вращения контртела.
Рассмотрим в установившемся режиме колебательную систему с вращаемым телом массы m, имеющим плоскую торцовую поверхность (фиг.2а)). На систему действует осевая сила РOC прижатия вращаемого тела 1 к контртелу 2, сила упругости РУП вращаемого тела

и центробежная вынуждающая сила F, зависящая от параметров круговых колебаний центра тяжести вращаемого тела

где ρ, ω - амплитуда и частота круговых колебаний вращаемого тела соответственно.
Учитывая, что отношение амплитуды колебаний вращаемого тела к его длине ρ/l мало, можно считать, согласно принципу Навье, при определении усилий вращаемое тело недеформируемым, т.е. при рассмотрении статического равновесия вращаемого тела можно величиной угла отклонения оси вращения вращаемого тела пренебречь и рассматривать статическую схему нагружения вращаемого тела (фиг.2б)).
Из условия равновесия вращаемого тела выразим вынуждающую силу

где l - длина вращаемого тела; z - координата центра тяжести вращаемого тела; D - диаметр вращаемого тела в зоне сопряжения.
Подставив в (5) выражения (3) и (4) и учитывая, что z<<l, получим следующее статическое уравнение системы

Теперь рассмотрим кинематическую схему движений вращаемого тела и контртела (фиг.2в)). В этой схеме уже учитываются отклонение ρ оси вращения вращаемого тела и направления вращения вращаемого тела и контртела.
Составим уравнение скоростей для вращаемого тела относительно неподвижной точки О. При одностороннем направлении вращения вращаемого тела и контртела будем иметь уравнение скоростей

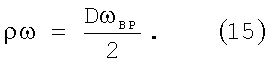
где VP - скорость центра тяжести вращаемого тела:

VBPP, VBPK - скорости точек К контакта вращаемого тела и контртела соответственно:
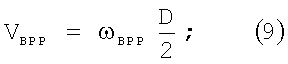
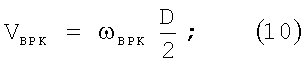
ωВРР, ωВРК - частоты вращения вращаемого тела и контртела соответственно; ω - частота круговых колебаний вращаемого тела.
Тогда уравнение скоростей (7) при одностороннем направлении вращения с учетом (8), (9) и (10) будет иметь вид

При противоположном направлении вращения уравнение скоростей будет иметь вид:

или с учетом (8), (9) и (10)

Уравнение (13) может использоваться только при условии, что ωВРР>>ωBPК.
Введем обозначение:

Здесь знак «минус» используется при одностороннем направлении вращения вращаемого тела и контртела.
Тогда обобщенное уравнение скоростей будет иметь вид:
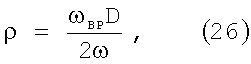
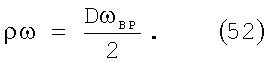
Решая совместно уравнения (6) и (15), получим выражения для частоты ω и амплитуды ρ колебаний центра тяжести вращаемого тела:


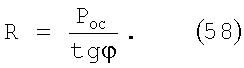
Рассмотрим в установившемся режиме колебательную систему с вращаемым телом массы m, имеющим коническую торцовую поверхность (фиг.3а)), когда ψ<180°. Также принимая вращаемое тело недеформируемым, из статического равновесия системы (фиг.3б)) выразим вынуждающую силу

где R - радиальная составляющая силы реакции N в точке К контакта вращаемого тела 1 и контртела 2; l - длина вращаемого тела; z - координата центра тяжести вращаемого тела; D - диаметр конической торцовой поверхности вращаемого тела.
Радиальная составляющая силы реакции равна
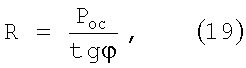
где
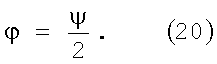
Тогда, с учетом (4), (19) и (20), выражение (18) примет вид:

В данной системе выполняются следующие равенства скоростей (фиг.3в)): при одностороннем направлении вращения

при противоположном направлении вращения

С учетом выражений (8), (9) и (10) обобщенное уравнение скоростей для рассматриваемой системы будет иметь вид

Это уравнение аналогично уравнению (15) для системы с вращаемым телом, имеющим плоскую поверхность сопряжения.
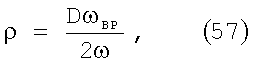
Решая совместно уравнения (21) и (24), получим выражения для частоты ω и амплитуды ρ колебаний вращаемого тела с ψ<180°:

где а - коэффициент, характеризующий размеры вращаемого тела
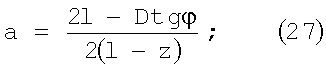

Проанализируем выражение (27). Так как z<<l, D<<2l, то при вращаемом теле с углом ψ<150°, значение коэффициента а будет стремиться к единице (а≈1). В этом случае выражение (25) будет упрощено:

Отличие колебательных систем, имеющих поверхности сопряжения с ψ=180 и ψ<180°, проявляется в выражениях (16) и (29) для частоты колебаний вращаемого тела. При этом соотношение частот генерируемых колебаний в обоих случаях, при прочих равных условиях, будет определяться следующим соотношением геометрических размеров вращаемых тел
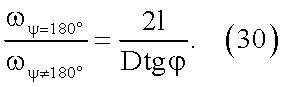
Из соотношения (30) видно, что бóльшие возможности регулирования диапазона воспроизводимых частот имеются в случае с ψ≠180°. Другие закономерности для виброприводов с плоским и коническим вращаемым телом идентичны.
Таким образом, в колебательных системах с вращаемым контртелом параметры колебаний, кроме геометрических и динамических параметров вращаемого тела, зависят еще и от частоты и направления вращения контртела, что расширяет возможности их регулирования.
Так, например, анализируя полученные зависимости частоты (16), (29) и амплитуды (17), (26) для колебательной системы с вращаемым контртелом можно выявить следующие закономерности.
1) При противоположном направлении вращения вращаемого тела и контртела, увеличение частоты вращения контртела приводит к уменьшению частоты и увеличению амплитуды колебаний центра тяжести вращаемого тела, а при одностороннем направлении вращения - к увеличению частоты и уменьшению амплитуды колебаний центра тяжести вращаемого тела.
2) При одностороннем направлении вращения, в случае, когда частоты вращения вращаемого тела и контртела будут равны, колебания вращаемого тела, связанные с кинематической неуравновешенностью, будут отсутствовать. Данный эффект можно использовать для гашения колебаний.
3) При большой суммарной частоте вращения вращаемого тела и контртела ωВР в случае противоположного направления вращения, влияние изменения частоты вращения контртела на частоту колебаний будет менее значительным, чем на амплитуду колебаний. Данный эффект можно использовать для независимого регулирования частоты и амплитуды колебаний.
Способ возбуждения колебаний по п.2 (фиг.4 а), б)) заключается в том, что (первое) вращаемое тело 7, установленное в подшипниках качения 4, перемещают в осевом направлении и поджимают тем самым между собой торцовыми поверхностями с требуемым тарированным осевым усилием РОС ко второму вращаемому телу 8, установленному в подшипниках качения 5 и расположенному с имеющимся телом на одной оси. Затем от приводов вращения через приводные валы 6, 7 и жесткие муфты, либо упругие элементы качения 3, 9 осуществляется вращение вращаемых тел 1, 8 с частотами вращения ωВР1 и ωВР2 соответственно, в различных направлениях. При этом вращение каждого вращаемого тела 1, 8 сопровождается поступательными круговыми движениями по поверхности сопрягаемого вращаемого тела, а центры тяжести каждого вращаемого тела совершают синхронные круговые колебания в одном направлении и с одинаковой частотой, независимо от величин и направления угловых скоростей каждого из вращаемых тел. Таким образом «единая» неуравновешенная масса при совершении круговых колебаний вокруг оси поворотной симметрии создает вращающуюся вынуждающую силу F, равную сумме вынуждающих сил каждого вращаемого тела:

Торцовые поверхности сопряжения вращаемых тел могут иметь попарно как плоскую (см. фиг.4а)), так и коническую форму (см. фиг.4б)).
В колебательной системе с плоской поверхностью сопряжения (см. фиг.4а)) вращаемое тело 1 имеет наружный диаметр D тарелки значительно меньше, вследствие чего торцовая поверхность второго вращаемого тела 8 исполняет роль контртела, по которой наружным диаметром обкатывается тарелка вращаемого тела 1. Но так как второе вращаемое тело 8 тоже имеет неустойчивое положение в поперечной плоскости, то и оно в установившемся режиме совершает круговые поступательные движения вокруг оси своей поворотной симметрии, обкатываясь по тарелке сопряженного с ним вращаемого тела 1. При этом центры тяжести вращаемых тел 1, 8 совершают круговые колебания с равной частотой ω. Синхронизация колебаний центров тяжести вращаемых тел достигается за счет неголономной связи вращаемых тел в точке их контакта, которая создает динамический эффект слияния вращаемых тел в одну целую неуравновешенную массу.
Так как колебания центров тяжести обоих вращаемых тел совершаются с равной частотой ω, то и амплитуды вынуждающих сил каждого вращаемого тела равны соответственно:


а вынуждающая сила системы, согласно (31), (32) и (33), будет

Для определения амплитуды и частоты колебаний вращаемых тел рассмотрим расчетные схемы установившегося режима колебаний вращаемого тела 1 и второго вращаемого тела 8 (фиг.5а)).
Каждое из вращаемых тел, помимо вынуждающих сил F1, F2, нагружен силами упругости стержней вращаемых тел:

где j1, j2 - жесткости стержней вращаемых тел, зависящие от способа закрепления вращаемых тел в опорах.
Также на вращаемые тела в точке их контакта действуют внутренние силы N, одна из составляющих которых равна осевой силе прижатия вращаемых тел РОС, а вторая R зависит от угла отклонения осей вращения вращаемых тел.
Так как отношение ρ/l - мало, то можно рассматривать статические схемы нагружения вращаемых тел без учета отклонения р оси вращения (фиг.5б)).
Выразим вынуждающие силы каждого вращаемого тела из условий равновесия системы.
Из условия равновесия вращаемого тела 1 получим выражение для F1
 F
F
где z1 - координата центра тяжести вращаемого тела; l1 - длина вращаемого тела.
Из условия равновесия вращаемого тела 8 получим выражение для F2

где z2 - координата центра тяжести второго вращаемого тела; l2 - длина второго вращаемого тела.
Суммарная вынуждающая сила вращаемых тел, согласно (32), (36) и (37), равна:

Введем обозначение:

тогда согласно (38) и учетом (35) и (39) получим

Приравняв правые части выражений (34) и (40), получим статическое уравнение системы

Теперь рассмотрим кинематические схемы колебательных и вращательных движений каждого вращаемого тела (фиг.5в)), в которых уже учитываются отклонения ρ1, ρ2 осей вращения вращаемых тел и направления их вращения.
Составим уравнения скоростей для вращаемых тел относительно неподвижных точек O1 и О2.
При противоположном направлении вращения вращаемых тел:

где V1, V2 - скорости центров тяжести первого и второго вращаемых тел:

VBP1, VBP2 - скорости точек К контакта тарелок у первого и второго вращаемых тел:

ωBP1, ωBP2 - частоты вращения первого и второго вращаемых тел.
С учетом (43) и (44) уравнения скоростей (42) примут вид:

Из выражения (45) следует, что амплитуды колебаний центров тяжести вращаемых тел равны:

Тогда согласно (45) и (46) уравнение скоростей при противоположном направлении вращения будет иметь вид:

При одностороннем направлении вращения вращаемых тел:

или

То есть ρ1=-ρ2, что связано только с односторонним направлением вращения вращаемых тел.
Таким образом, при соблюдении равенства амплитуд (46), уравнение скоростей при одностороннем направлении вращения вращаемых тел будет:

Уравнение (50) может использоваться только при условии, что ωBP1>ωBP2.
Введем обозначение

Здесь знак "минус" используется при одностороннем направлении вращения вращаемых тел.
Тогда обобщенное уравнение скоростей для вращаемых тел будет иметь вид:
С учетом равенства (46) изменится и выражение (41) для статического уравнения системы

Введем обозначения:

тогда уравнение (53) примет вид:

Решая совместно уравнения (52) и (55), получим выражения для частоты и амплитуды колебаний:

где l определятся согласно (39), ωBP - согласно (51), а m и j - согласно (54).
Рассмотрим колебательную систему с конической поверхностью сопряжения (см. фиг.4б)), в которой обкатывание одного из вращаемых тел происходит по конической (внутренней или наружной) поверхности диаметра D2 тарелки другого вращаемого тела.
Для вывода закономерностей колебательных процессов в такой системе рассмотрим динамические схемы колебательных движений первого и второго вращаемых тел в установившемся режиме колебаний (фиг.6а)).
Отличительной особенностью в таком виброприводе является значительное влияние угла φ конуса вращаемых тел на распределение нагрузок в системе. Это влияние происходит из-за появления в плоскостях колебаний (в плоскостях перпендикулярных оси O1O2 поворотной симметрии вращаемых тел и проходящих через центры тяжести тарелок вращаемых тел), значительных по величине внутренних сил R в точке контакта тарелок вращаемых тел.
Полагая, что ρ<<l, также как и в случае с плоскими вращаемыми телами, составим статические схемы нагружения отдельно первого и второго вращаемых тел (фиг.6б)).
При таких схемах внутренняя реактивная сила R равна:
Выразим вынуждающие силы каждого вращаемого тела из условий равновесия системы.
Из условия равновесия вращаемого тела 1 получим выражение для F1

где h - высота соприкосновения конических поверхностей вращаемых тел:

D1, D2 - диаметры оснований конусов первого и второго вращаемых тел.
Из условия равновесия вращаемого тела 8 получим выражение для F2

Суммарная вынуждающая сила вращаемых тел, согласно (42), равна

Введем обозначение:

Тогда с учетом (34), (35), (39), (62) и (63) получим статическое уравнение системы

Кинематические схемы колебательных и вращательных движений конических вращаемых тел (фиг.6 в)) совпадают с подобными схемами для колебательной системы с плоской поверхностью сопряжения, поэтому, с учетом равенства амплитуд (46) и выражения (51) для суммарной частоты вращения, уравнение скоростей для системы с конической поверхностью сопряжения будет иметь вид
Подставив в выражение (64) выражения (46), (54), получим:

Решая совместно уравнения (65) и (66), получим выражения для частоты и амплитуды колебаний:

где l определятся согласно (39), ωBP - согласно (51), m и j - согласно (54), a k - согласно (63).
Проанализируем выражение (67). Для системы с конической поверхностью сопряжения значения z1, z2 и h значительно меньше значений l1 и l2. Поэтому можно считать, что:

а следовательно, согласно (63)

Таким образом, с учетом (70) для практических расчетов можно использовать следующую формулу для определения частоты колебаний вращаемых тел

которая получается аналогичной выражению (3.74) для системы с плоской поверхностью сопряжения.
Отсюда можно сделать вывод, что угол φ конусов тарелок вращаемых тел не влияет на частоту ω и амплитуду ρ колебательной системы, а следовательно, и не влияет на величину вынуждающей силы F. Это связано с тем, что внутренние реактивные силы R, зависящие от угла φ конусов вращаемых тел, действуют в плоскости колебаний, а так они являются внутренними, а значит равны по величине и противоположны по направлению, то взаимно уравновешивают друг друга.
Учитывая, что в колебательных системах с двумя соосно расположенными вращаемыми телами параметры колебаний зависят еще и от кинематических параметров второго вращаемого тела, возможности их регулирования значительно расширяются.
Так, например, анализируя полученные зависимости частоты (56), (71) и амплитуды (57), (68) для колебательной системы с двумя соосно расположенными вращаемыми телами можно выявить следующие закономерности.
1) Увеличение частоты вращения одного из вращаемых тел приводит к уменьшению частоты колебаний, причем при противоположном направлении вращения изменение частоты колебаний менее значительно, чем при одностороннем направлении вращения.
2) При одностороннем направлении вращения вращаемых тел, в случае, когда частоты вращения обоих вращаемых тел равны, колебания вращаемых тел, связанные с кинематической неуравновешенностью, наблюдаться не будут.
3) Применение двух вращаемых тел увеличивает в два раза (при прочих равных условиях) вынуждающую силу.
Таким образом, за счет расширения возможностей регулирования частоты и амплитуды возбуждаемых колебаний, согласно зависимостям (16), (29), (17), (26), (56), (71), (57) и (68), предлагаемый способ возбуждения значительно повысит эффективность использования вибрационных машин.
Полученные колебания могут передаваться на рабочий орган вибрационной машины или технологическую среду непосредственно с вращаемого тела или контртела. При этом при незначительных частотах вращения вращаемых тел и контртела можно стабильно получать частоты колебаний, в десятки и сотни раз превышающие частоты вращения. И при этом варьируя значительным количеством исходных параметров, регулируют частоту и амплитуду этих колебаний в широком диапазоне. Управляют параметрами колебаний путем изменения осевой тарированной силы прижима, путем изменения массы вращаемых тел, путем изменения длины вращаемых тел, путем изменения частоты вращения вращаемых тел и контртела, путем изменения диаметров вращаемых тел в зоне их сопряжения, путем изменения взаимного направления вращений вращаемых тел и контртела, путем изменения жесткости стержней вращаемых тел.
Ожидается ощутимый экономический эффект от внедрения способа возбуждения колебаний, так как в современных вибрационных установках для создания различных по параметрам колебаний используется несколько вибровозбудителей, каждый из которых возбуждает колебания определенных неизменяемых параметров: частоты и амплитуды, или эти параметры сложно регулируемы. Поэтому при замене известных конструкций вибровозбудителей на вибровозбудители, которые будут основаны на предлагаемом способе, за счет повышения эффективности, существенно снизится их стоимость.
Промышленная применимость, таким образом, предлагаемого способа может быть реализована в вибрационных машинах, применяемых в строительстве, транспорте, металлообработке, станкостроении, горной и других отраслях промышленности, где используется вибрация.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2011 |
|
RU2476275C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2013 |
|
RU2533743C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2019 |
|
RU2725900C1 |
| Способ возбуждения колебаний | 2020 |
|
RU2739160C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2019 |
|
RU2716862C1 |
| Способ возбуждения круговых колебаний и устройство для его осуществления | 1988 |
|
SU1664412A1 |
| Способ активации процесса перемешивания жидких сред и устройство для его реализации | 2019 |
|
RU2720149C1 |
| СПОСОБ ПЕРЕМЕШИВАНИЯ ЖИДКОСТИ | 2013 |
|
RU2543204C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕЗКИ СТЕКЛА | 2003 |
|
RU2248944C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347627C1 |
Изобретение относится к вибрационной технике и может быть использовано в вибрационных машинах, применяемых в строительстве, транспорте, металлообработке, станкостроении, горной и других отраслях промышленности, где используется вибрация. Технический результат заключается в повышении эффективности использования вибрационных машин, которое заключается в расширении возможностей регулирования параметров возбуждаемых колебаний за счет применения в механизме возбуждения колебаний независимого принудительного вращения второго вращаемого тела, причем это вращение осуществляется одновременно с вращением имеющегося тела в разных направлениях. Способ возбуждения колебаний заключается в том, что вращаемое тело сопрягают торцовой поверхностью со вторым вращаемым телом тарированной силой прижима и обкатывают его по замкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, причем одновременно с вращаемым телом в разных направлениях вращают второе вращаемое тело вокруг оси собственной симметрии. 1 з.п. ф-лы, 6 ил.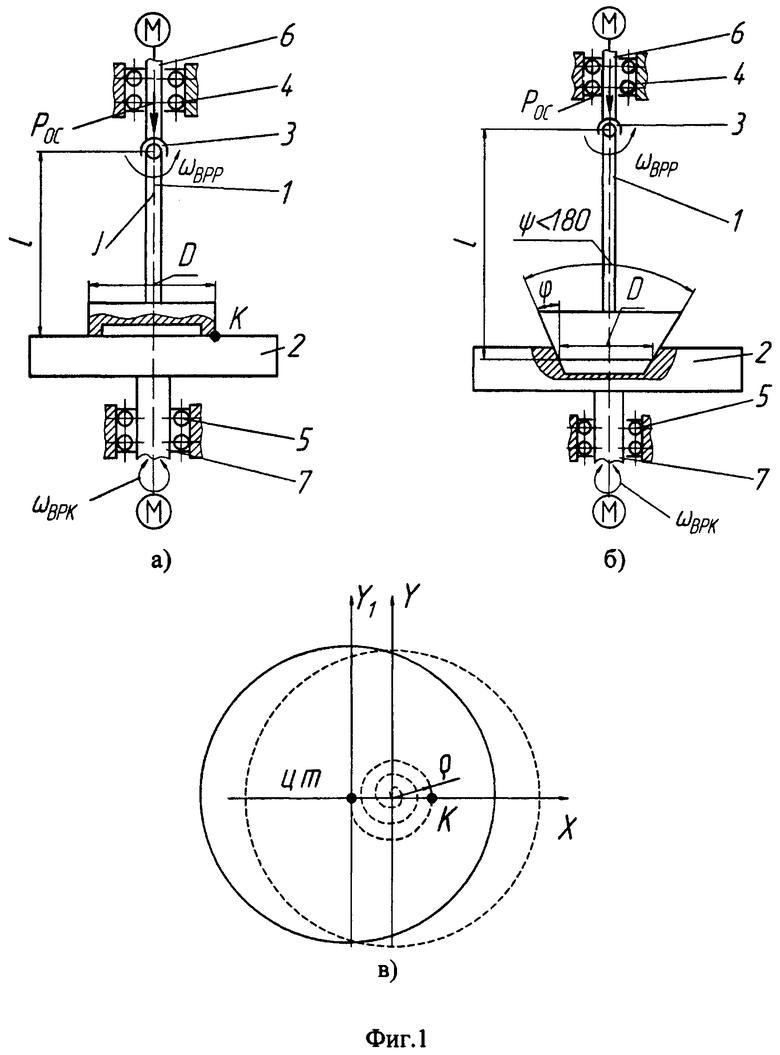
1. Способ возбуждения колебаний, заключающийся в том, что вращаемое тело сопрягают торцовой поверхностью со вторым вращаемым телом тарированной силой прижима и обкатывают его по замкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, отличающийся тем, что одновременно с вращаемым телом в разных направлениях вращают второе вращаемое тело вокруг оси собственной симметрии.
2. Способ по п.1, отличающийся тем, что вращаемое тело сопрягают торцовой поверхностью со вторым вращаемым телом, расположенным с имеющимся телом на одной оси, причем оба вращаемых тела одновременно вращают с различными угловыми скоростями и в разных направлениях.
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347627C1 |
| Способ возбуждения круговых колебаний и устройство для его осуществления | 1988 |
|
SU1664412A1 |
| 0 |
|
SU159319A1 | |
| Вибростенд | 1987 |
|
SU1499137A1 |

