Изобретение относится к вибрационной технике и может быть использовано в вибрационных машинах, применяемых при диспергировании твердых сред, в том числе при переработке отходов, а также в строительстве, транспорте, медицине, металлообработке, сельском хозяйстве, станкостроении, пищевой, горной и других отраслях промышленности, где используется вибрация с различными законами колебаний.
Известен способ возбуждения круговых колебаний [SU 1664412 А1, «СПОСОБ ВОЗБУЖДЕНИЯ КРУГОВЫХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ», МПК В06В 1/16, опубл. 23.07.1991], при котором вращаемое тело и контртело сопрягают с тарированной силой прижима так, чтобы область контакта имела замкнутую форму с поворотной симметрией, одно из сопрягаемых тел приводят во вращение вокруг оси поворотной симметрии области контакта, при этом частотой колебательных движений управляют по соотношению

а их амплитудой по соотношению
с сохранением постоянства соотношения
где РОС - величина осевой тарированной силы прижима вращаемого тела к контртелу;
ωВР - частота вращения вращаемого тела;
m - масса вращаемого тела;
L - вылет вращаемого тела;
j - жесткость ротора;
D - диаметр вращаемого тела в зоне его сопряжения с контртелом.
Недостатком данного способа является отсутствие возможности получения и управления параметрами объемных вибрационных полей сложной формы, в связи с тем, что способ предназначен только для формирования квазикруговых высокочастотных колебаний в плоскости сопряжения контртела и вращаемого тела.
Известен способ возбуждения колебаний [RU 2533743 С1, «СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ», МПК В06В 1/16, опубл. 20.11.2014], который заключается в том, что вращаемое тело и контртело сопрягают с тарированной силой прижима и обкатывают его по замкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории и одновременно воздействуют на них неуравновешенной радиальной силой, постоянно меняя ее направление с частотой вращения тела, при этом суммарной амплитудой колебаний управляют по соотношению

где
Δω=ω1+ω2;
F2 - неуравновешенная радиальная сила;
ω1 - частота колебаний вращаемого тела;
ω2 - частота вращения;
r1 - радиус вращаемого тела;
М - суммарная масса тел;
t - время.
Недостатком данного способа является ограниченность его применения, выражающаяся в том, что он предназначен только для формирования квазикруговых высокочастотных амплитудно-модулируемых колебаний в плоскости сопряжения контртела и вращаемого тела, и не позволяет получать объемные амплитудно-модулируемые колебания сложной формы.
Известен способ возбуждения колебаний и устройство для его осуществления [RU 2410166 С1, «СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ», МПК В06В 1/16, опубл. 27.01.2011], взятый за прототип, согласно которому вращаемое тело сопрягают торцевой поверхностью со вторым вращаемым телом тарированной силой прижима и обкатывают его по замкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, при этом одновременно с вращаемым телом в разных направлениях и различными угловыми скоростями вращают второе вращаемое тело вокруг оси собственной симметрии.
Недостатком прототипа является отсутствие возможности получать объемные амплитудно-модулированные колебания, формирующие вибрационные поля сложной формы. Такие колебания необходимы, например, для задания рабочему органу или инструменту сложных траекторий формообразующих движений в станках для размерного диспергирования твердых сред с целью управления формой и размерами дисперсных частиц [4].
Технической задачей, на решение которой направлено заявляемое изобретение, является расширение технологических возможностей вибрационных машин.
Технический результат - задание рабочему органу сложных формообразующих движений, за счет генерирования и управления сложной формой объемного вибрационного поля, формируемого колебаниями с модулируемыми свойствами.
Поставленная технический результат достигается тем, что в способе возбуждения колебаний два вращаемых тела сопрягают торцевыми поверхностями тарированной силой прижима и, одновременно вращая их в разных направлениях с различными угловыми скоростями, обкатывают каждое по собственной замкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, при этом одновременно, но не синхронно, на них воздействуют двумя неуравновешенными радиальными силами и постоянно меняют их направление с частотой вращения по крайней мере одного из вращаемых тел, тем самым, в системе механически генерируют колебания с модулируемыми свойствами, формирующие объемные вибрационные поля сложной формы.
Сравнение заявленного способа возбуждения с известными позволяет сделать вывод о достижении нового эффекта, выразившегося в возможности генерирования и управления сложной формой объемного вибрационного поля, формируемого колебаниями с модулируемыми свойствами.
Сущность изобретения поясняется чертежами, где
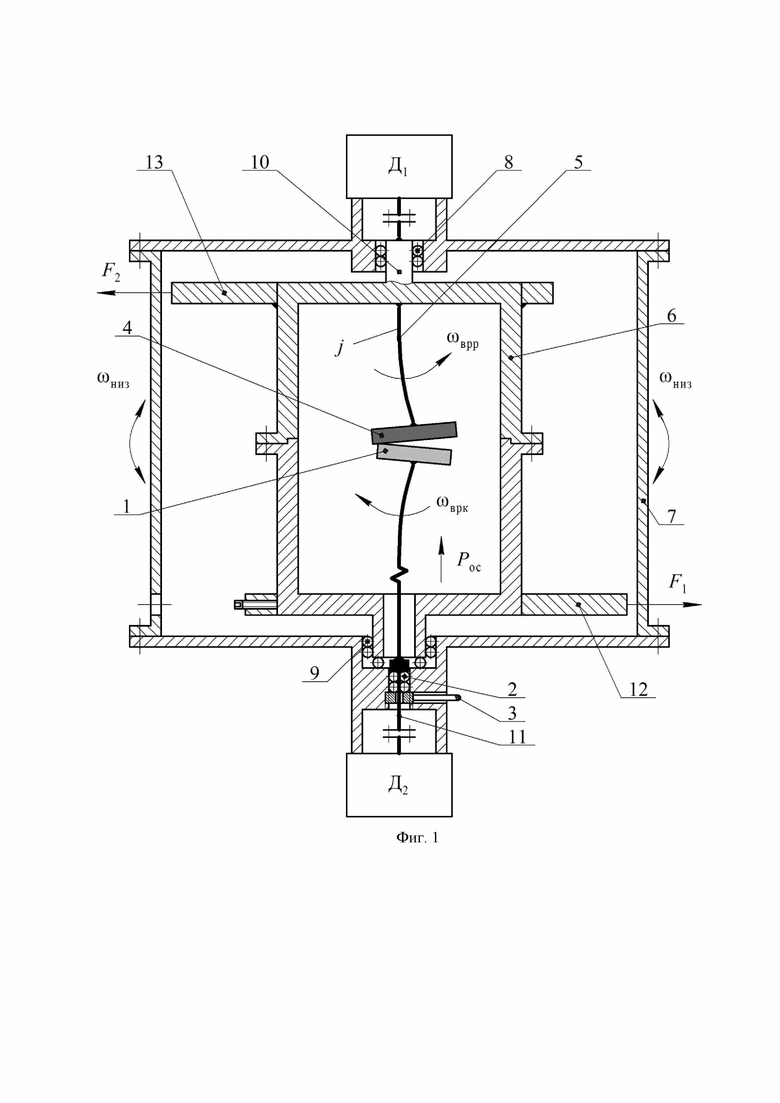
на фиг. 1 показана схема возбуждения колебаний при принудительном воздействии двух радиальных неуравновешенных сил на два соосно расположенных вращаемых тела;
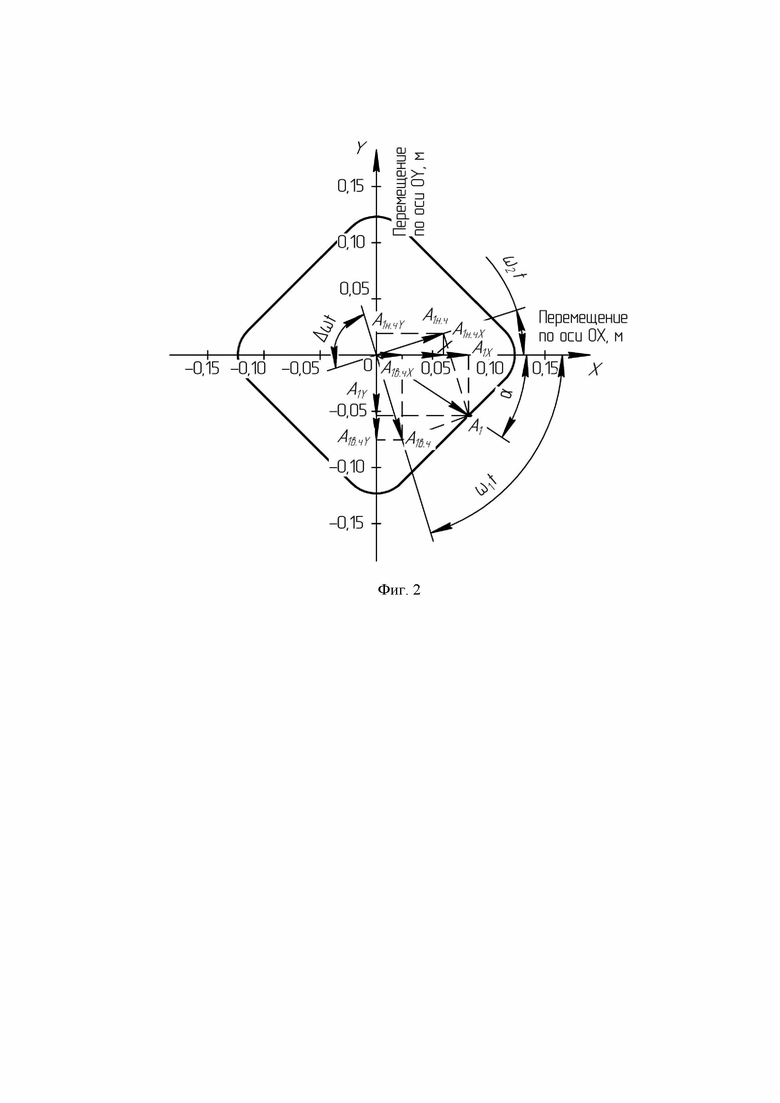
на фиг. 2 показана схема формирования траектории виброперемещений двух видов колебаний с разными амплитудами и частотами.;
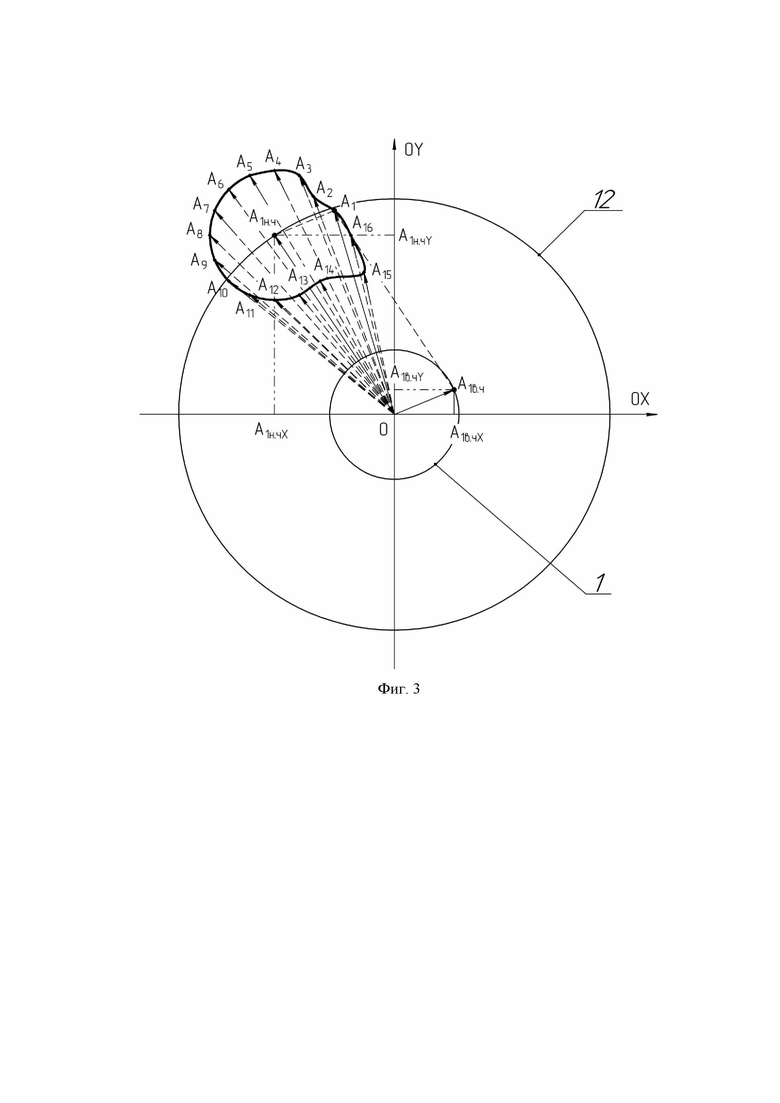
на фиг. 3 показана проекция изменения положения радиус-вектора суммарных модулируемых колебаний первого вращаемого тела при воздействии на него неуравновешенной радиальной силы в системе координат XOY за единицу времени (нижняя часть вибропривода);
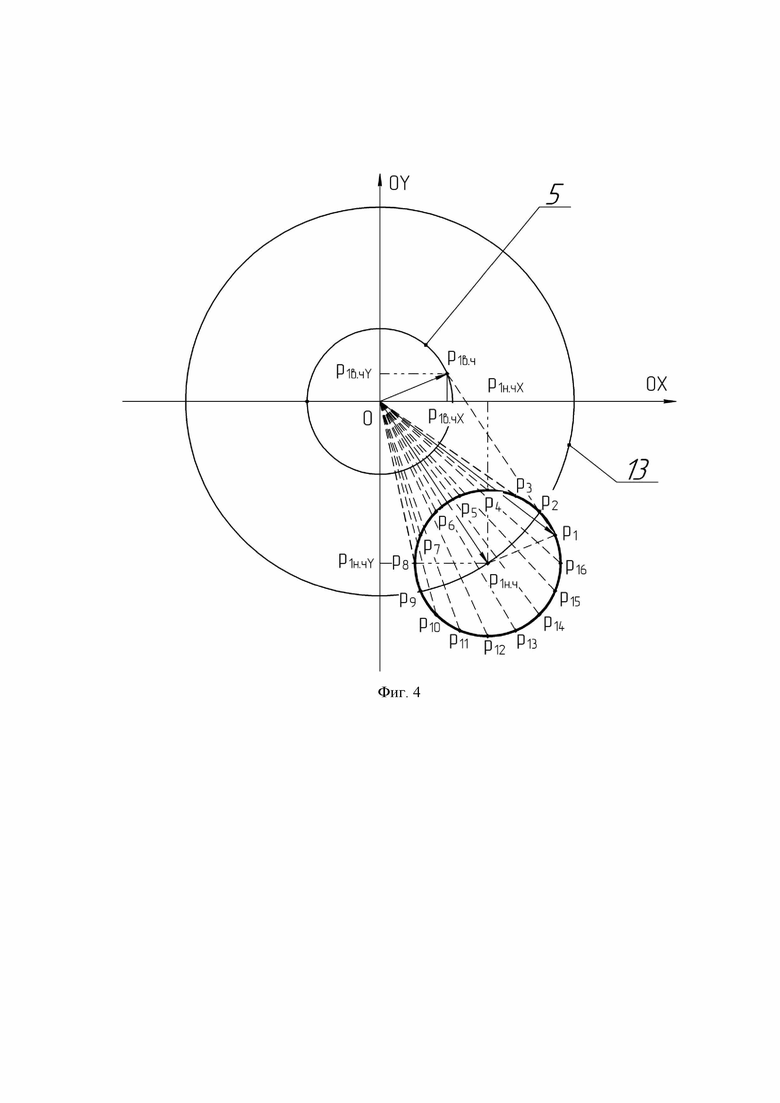
на фиг. 4 показана проекция изменения положения радиус-вектора суммарных модулируемых колебаний второго вращаемого тела при воздействии на него неуравновешенной радиальной силы в системе координат XOY за единицу времени (верхняя часть вибропривода);
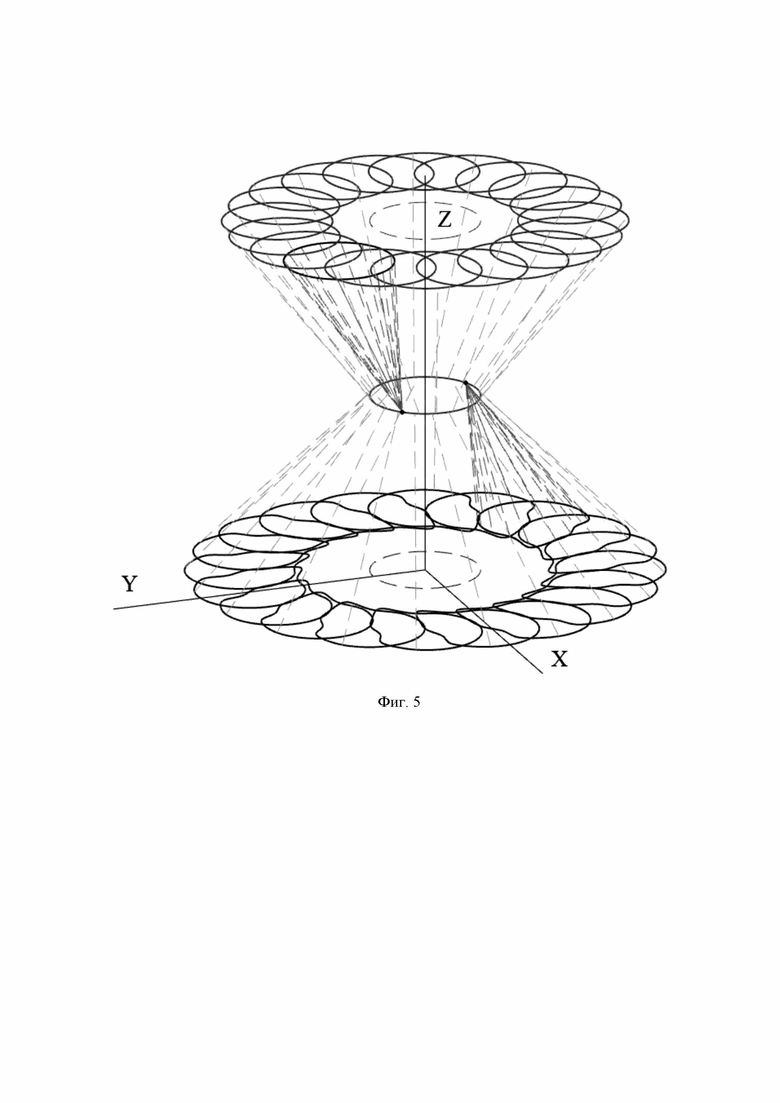
на фиг. 5 показана схема формирования модулируемых колебаний первого и второго вращаемых тел при воздействии на них двух неуравновешенных радиальных сил в трехмерной системе координат за время t;
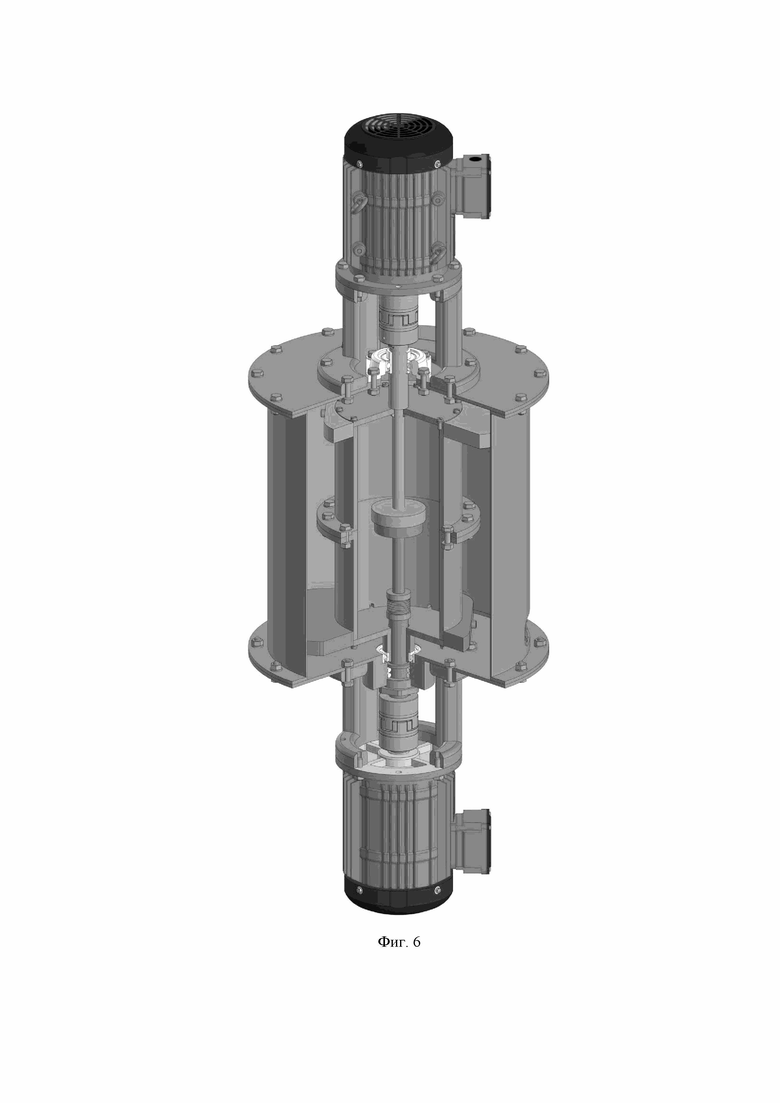
на фиг. 6 показана 3D модель вибропривода - примера реализации способа возбуждения пространственных колебаний сложной формы с модулируемыми свойствами.
Способ возбуждения колебаний (фиг. 1) заключается в том, что первое вращаемое тело 1, установленное в шариковом узле 2, перемещая в осевом направлении посредством гайки 3 и торцом тарелки, сопрягают с требуемой тарированной силой прижима РОС с торцом тарелки второго вращаемого тела 4, жестко закрепленного посредством вала 5, имеющего жесткость j, в стакане 6, размещенного в корпусе 7 на подшипниках качения 8 и 9, и расположенного с первым телом вращения 1 на одной оси. Затем эти вращаемые тела 1 и 4 посредством приводов вращения Д1 и Д2 через приводные валы 10, 11 вращают с частотами вращения ωВРР и ωВРК соответственно, в противоположных направлениях. При этом вращение каждой тарелки вращаемых тел 1 и 4 сопровождается собственными относительными поступательными квазикруговыми движениями по поверхностям сопрягаемых вращаемых тел, а центры тяжести каждого вращаемого тела совершают собственные квазикруговые высокочастотные колебания. Вместе с тем на первое вращаемое тело 1 дополнительно принудительно воздействуют неуравновешенной радиальной силой F1, создаваемой, например, инерционной массой 12, а на второе вращаемое тело с тарелкой 4 принудительно, но не синхронно, воздействуют радиальной силой F2, создаваемой, например, инерционной массой 13 и постоянно меняют их направление с частотой вращения ωВРР. Тем самым на фоне высокочастотных колебаний, генерируемых вращаемыми телами 1 и 4, дополнительно принудительно возбуждают низкочастотные колебания, которые, синхронизируясь с высокочастотными колебаниями, придают системе модулирующие свойства.
Для пояснения сущности способа, на примере векторной диаграммы колебаний, рассмотрим принцип формирования суммарных (модулируемых) колебаний высокочастотных, генерируемых вращаемым телом 1, и низкочастотных, создаваемых силой F1 посредством инерционной массы 12. Принцип формирования траектории двух колебаний с разными амплитудами и частотами может быть представлен в виде движения радиуса-вектора (фиг. 2) суммарной амплитуды A1 колебаний с углом поворота α.

где
А1в.ч - радиус-вектор амплитуды колебаний вращаемого тела;
А1н.ч - радиус-вектор амплитуды колебаний неуравновешенной радиальной силы F1.
Система уравнений проекций колебаний системы

где
и
где ω1 - частота колебаний вращаемого тела
А1в.чХ, А1в.чY - проекции радиуса-вектора амплитуды колебаний вращаемого тела соответственно на оси ОХ и OY;
ω2 - частота вращения;
А1н.чХ, А1н.чY - проекции радиуса-вектора амплитуды колебаний неуравновешенной радиальной силы F1, соответственно на оси ОХ и OY;
A1X, A1Y - проекции радиус-вектора суммарных колебаний, соответственно на оси ОХ и OY.
При этом угол поворота α радиуса-вектора колебаний A1 равен

где
ψ - сдвиг фаз угла поворота радиуса-вектора колебаний A1.
А уравнение амплитуды результирующего радиуса-вектора колебаний A1 может иметь вид:

где
Δωt - разность фаз колебаний
Из приведенного уравнения (4) видно, что уравнение движения радиуса-вектора колебаний A1 в конечном счете зависит от частот ω1 и ω2 и амплитуд А1в.ч и А1н.ч колебаний вращаемого тела и неуравновешенной радиальной силы F1, причем траектория виброперемещений может меняться от квазикруговой до линейной, а при определенных условиях даже иметь форму многоугольника или фигур Лиссажу.
Рассмотрим принцип получения в пространстве сложной траектории высокочастотных виброперемещений, генерируемых вращаемым телом 1, и низкочастотных, генерируемых силой F1 посредством инерционной массы 12 (фиг. 3). В качестве допущения примем, что форма низкочастотных колебаний, возбуждаемых инерционной массой 12, может быть условно представлена в виде окружности, а их частота много меньше частоты высокочастотных колебаний, возбуждаемых вращаемым телом 1, в связи с чем изменение положения центра масс неуравновешенной радиальной силы F1, за рассматриваемый промежуток времени, можно пренебречь. В начальный момент времени результирующий вектор модулируемых колебаний A1 может быть представлен в виде суммы вектора высокочастотных колебаний А1в.ч, с проекцией А1в.ч.Х на ось X и проекцией А1в.ч.Y на ось Y, и вектора низкочастотных колебаний А1н.ч., с проекциями А1н.ч.Х на ось X и проекцией А1н.ч.Y на ось Y. При перемещении центра тяжести вращаемого тела 1 по квазикруговой траектории происходит изменение фазы колебаний, что влечет за собой изменение результирующей амплитуды модулируемых колебаний. В результате чего формируется сложная замкнутая траектория.
Принцип формирования траектории суммарных модулируемых колебаний вращаемого тела 4 и инерционной массы 13 на примере векторной диаграммы колебаний (фиг. 4) аналогичен. Так же, как и в случае с модулируемыми колебаниям вращаемого тела 1 и инерционной массы 12, в качестве допущения примем, что форма траектории низкочастотных колебаний, возбуждаемых инерционной массой 13, может быть условно представлена в виде окружности, а их частота много меньше частоты высокочастотных колебаний, возбуждаемых вращаемым телом с тарелкой 4, в связи с чем изменением положения центра масс неуравновешенной радиальной силы за рассматриваемый промежуток времени тоже можно пренебречь. В начальный момент времени результирующий радиус-вектор модулируемых колебаний p1 может быть представлен в виде суммы вектора высокочастотных колебаний р1в.ч., с проекцией р1в.ч.Х на ось X и проекцией Р1в.ч.Y на ось Y, и вектора низкочастотных колебаний р1н.ч., с проекциями р1н.ч.Х на ось X и проекцией р1н.ч.Y на ось Y. При перемещении центра тяжести вращаемого тела 4 по квазикруговой траектории происходит изменение фазы колебаний, что влечет за собой изменение результирующей амплитуды модулируемых колебаний. В результате чего формируется замкнутая траектория, которая в свою очередь может меняться от квазикруговой до линейной, а при определенных условиях даже иметь форму многоугольника или фигур Лиссажу. Таким образом в верхней и нижней частях системы формируют сложные амплитудно-модулируемые колебания, причем формой траекторий колебательных перемещений можно управлять посредством изменения частоты и амплитуды колебаний как вращаемых тел 1 и 4, так и вращающихся неуравновешенных радиальных сил F1 и F2.
При рассмотрении всей колебательной системы в трехмерной прямоугольной системе координат XYZ (фиг. 5) можно увидеть, что благодаря наличию сложных модулируемых колебаний, генерируемых вращаемым телом 1 с инерционной массой 12, и модулируемых колебаний, генерируемых вращаемым телом 4 с инерционной массой 13, форма вибрационного поля всей колебательной системы носит объемный характер, например, пространственная форма вибрационного поля напоминает форму песочных часов. Причем имеется возможность управления пространственной формой поля колебаний как отдельно верхней, так и нижней части системы, что предполагает более широкие возможности регулирования не только интенсивности, но и даже направленности колебаний системы, без применения сложных конструктивных решений.
Ожидается ощутимый технический эффект от внедрения и использования предлагаемого способа за счет возможности генерирования управляемых сложных объемных модулируемых колебаний, требуемой формы одним вибровозбудителем.
Предлагаемый способ может найти в различных промышленных отраслях, например, в виброприводах измельчителей для переработки отходов упруговязких материалов в качественное вторичное сырье в виде измельченных частиц с требуемыми формой и размерами. Таким образом, исходя из полученных результатов, можно сделать вывод, что поставленная техническая задача решена.
Предлагаемый способ возбуждения объемных модулируемых колебаний может быть реализован устройством (фиг. 6), позволяющим осуществлять «тонкую» регулировку параметров колебательного процесса.
Источники информации
1. SU 1664412 А1, «Способ возбуждения круговых колебаний и устройство для его осуществления», МПК В06В 1/16, опубл. 23.07.1991.
2. RU 2533743 С1, «Способ возбуждения колебаний», МПК В06В 1/16, опубл. 20.11.2014.
3. RU 2410166 С1, «Способ возбуждения колебаний», МПК В06В 1/16, опубл. 27.01.2011.
4. Сергеев, С.В. Совершенствование процесса измельчения отходов металлов и пластмасс при их переработке: монография / С.В. Сергеев, Е.Н. Гордеев. - Челябинск: Издательский центр ЮУрГУ, 2010. - 110 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2019 |
|
RU2725900C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2019 |
|
RU2716862C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2013 |
|
RU2533743C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2009 |
|
RU2410166C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2011 |
|
RU2476275C1 |
| Способ активации процесса перемешивания жидких сред и устройство для его реализации | 2019 |
|
RU2720149C1 |
| СПОСОБ ПЕРЕМЕШИВАНИЯ ЖИДКОСТИ | 2013 |
|
RU2543204C2 |
| Способ возбуждения круговых колебаний и устройство для его осуществления | 1988 |
|
SU1664412A1 |
| Вибрационная резонансная планетарно-шаровая мельница | 2022 |
|
RU2819319C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347627C1 |
Изобретение относится к вибрационной технике и может быть использовано в вибрационных машинах, применяемых при диспергировании твердых сред, в том числе при переработке отходов, а также в строительстве, транспорте, медицине, металлообработке, сельском хозяйстве, станкостроении, пищевой, горной и других отраслях промышленности, где используется вибрация с различными законами колебаний. Способ возбуждения колебаний заключается в том, что два вращаемых тела сопрягают торцевыми поверхностями тарированной силой прижима и, одновременно вращая их в разных направлениях с различными угловыми скоростями, обкатывают каждое по собственной замкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, при этом одновременно, но не синхронно, на них воздействуют двумя неуравновешенными радиальными силами и постоянно меняют их направление с частотой вращения по крайней мере одного из вращаемых тел, тем самым в системе механически генерируют колебания с модулируемыми свойствами, формирующие объемные вибрационные поля сложной формы. Технический результат - расширение технологических возможностей способа, путем генерирования и управления сложной формой объемного вибрационного поля, формируемого колебаниями с модулируемыми свойствами. 6 ил.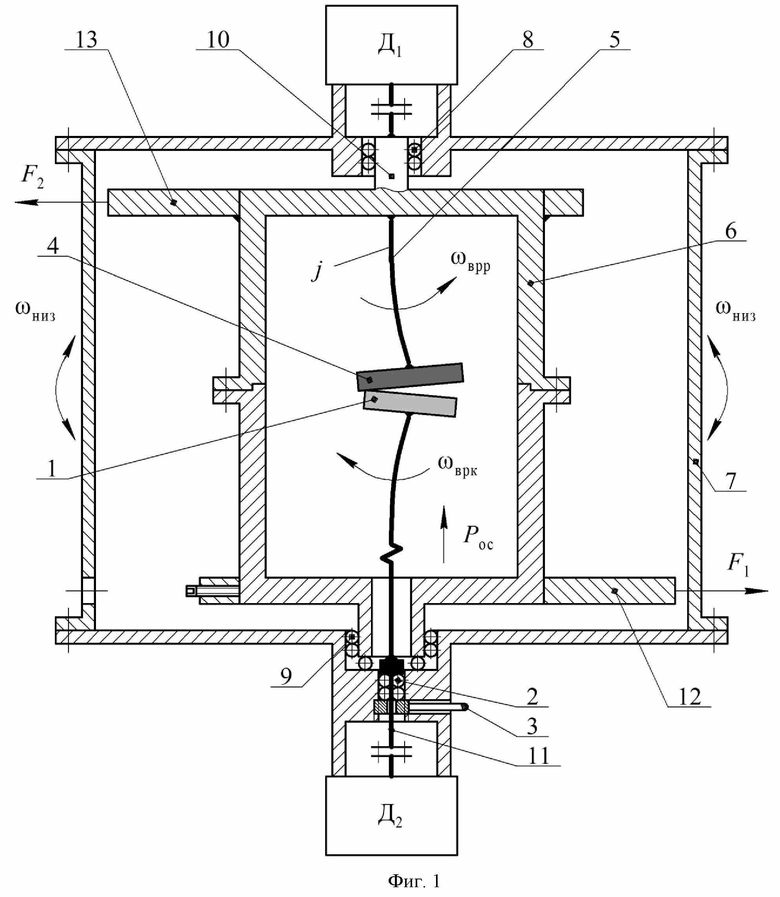
Способ возбуждения колебаний, заключающийся в том, что два вращаемых тела сопрягают торцевыми поверхностями тарированной силой прижима и, одновременно вращая их в разных направлениях с различными угловыми скоростями, обкатывают каждое по собственной замкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, отличающийся тем, что одновременно, но не синхронно, на них воздействуют двумя неуравновешенными радиальными силами и постоянно меняют их направление с частотой вращения по крайней мере одного из вращаемых тел, тем самым в системе механически генерируют колебания с модулируемыми свойствами, формирующие объемные вибрационные поля сложной формы.
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2019 |
|
RU2725900C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2019 |
|
RU2716862C1 |
| Способ возбуждения синхронных колебаний в виброприводах / Ю | |||
| С | |||
| Сергеев, С | |||
| В | |||
| Сергеев, А | |||
| В | |||
| Кононистов, Г | |||
| Е | |||
| Способ получения смеси хлоргидратов опийных алкалоидов (пантопона) из опийных вытяжек с любым содержанием морфия | 1921 |
|
SU68A1 |
| Секции технических наук | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| - С | |||
| Приспособление для сбрасывания на парашюте почтовых отправлений с летательных аппаратов | 1923 |
|
SU958A1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2013 |
|
RU2533743C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2011 |
|
RU2476275C1 |
| US 20020112948 A1, | |||

