Изобретение относится к вибрационной технике и может быть использовано в вибрационных машинах, применяемых в строительстве, транспорте, металлообработке, станкостроении, горной и других отраслях промышленности, где используется вибрация.
1. Известен способ возбуждения колебаний (см. патент РФ 2347627, МПК8 B06B 1/16. Способ возбуждения колебаний и устройство для его осуществления / С.В.Сергеев, Б.А.Решетников, Р.Г.Закиров, Ю.С.Сергеев. - №2007136688/28; заявл. 04.10.2007; опубл. 27.02.2009. - БИ №6), заключающийся в том, что тело вращения сопрягают с контртелом тарированной силой прижима и обкатывают его по замкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, и отличающийся тем, что по крайней мере еще одно тело вращения сопрягают с контртелом имеющегося тела, затем эти тела посредством жесткой кинематической связи с одинаковыми угловыми скоростями одновременно обкатывают по их собственным замкнутым траекториям, каждая из которых имеет поворотную симметрию вокруг оси симметрии своей траектории. При этом изменением у самосинхронизирующих тел вращения направлений вращения и диаметров их тарелок в зоне сопряжения с контртелом создают круговые и прямолинейные колебания в колебательной системе.
Недостатком данного способа является низкая эффективность применения вследствие сложности регулирования параметров и настройки требуемой формы возбуждаемых колебаний, зависящих от параметров и одновременной настройки двух тел вращения.
Известен способ возбуждения круговых колебаний (см. а.с. 1664412 СССР, МКИ3 B06B 1/15. Способ возбуждения круговых колебаний и устройство для его осуществления / С.Г.Лакирев, Я.М.Хилькевич, С.В.Сергеев. - №4414912/24-28; заявл. 24.04.88; опубл. 23.07.91. БИ №27. - 10 с.), который заключается в том, что вращаемое тело сопрягают с контртелом тарированной силой прижима и обкатывают его по замкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, при этом частотой колебательных движений управляют по соотношению

а их амплитудой - по соотношению
где Pос - величина осевой тарированной силы прижима вращаемого тела к контртелу;
ωвр - частота вращения вращаемого тела;
m - масса вращаемого тела;
l - вылет вращаемого тела;
j - жесткость стержня вращаемого тела;
D - диаметр вращаемого тела в зоне его сопряжения с контртелом.
Недостатком данного способа, взятого за прототип, является низкая эффективность применения, так как он не позволяет реализовывать прямолинейные колебания в колебательной системе.
Задачей, на решение которой направлено заявляемое изобретение, является повышение эффективности за счет возможности настройки прямолинейной формы возбуждаемых колебаний и упрощения регулирования их параметрами.
Для решения поставленной задачи предлагается способ возбуждения колебаний, заключающийся в том, что тело вращения сопрягают с контртелом тарированной силой прижима и обкатывают его по последнему с частотой, меньшей частоты генерируемых колебаний, отличающийся тем, что тело вращения обкатывают по незамкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, причем частотой колебательных движений управляют по соотношению
а амплитудой по формуле
где Pос - величина осевой тарированной силы прижима тела вращения к контртелу;
ωвр - частота вращения тела вращения;
m - масса тела вращения;
l - вылет тела вращения;
j - жесткость стержня тела вращения;
D - диаметр тела вращения в зоне его сопряжения с контртелом.
Сравнение заявленного способа возбуждения колебаний с известными позволяет сделать вывод о достижении нового эффекта, выразившегося в возможности возбуждения прямолинейной формы колебаний с упрощением настройки и регулирования их параметрами. Это стало возможным за счет применения в механизме возбуждения колебаний контртела с треугольным профилем и обеспечения за счет этого обкатывания тела вращения по незамкнутой траектории, что позволяет сделать вывод о соответствии критерию «изобретательский уровень».
Сущность изобретения поясняется чертежами, где
на фиг.1 показана схема вибровозбудителя для реализации предлагаемого способа;
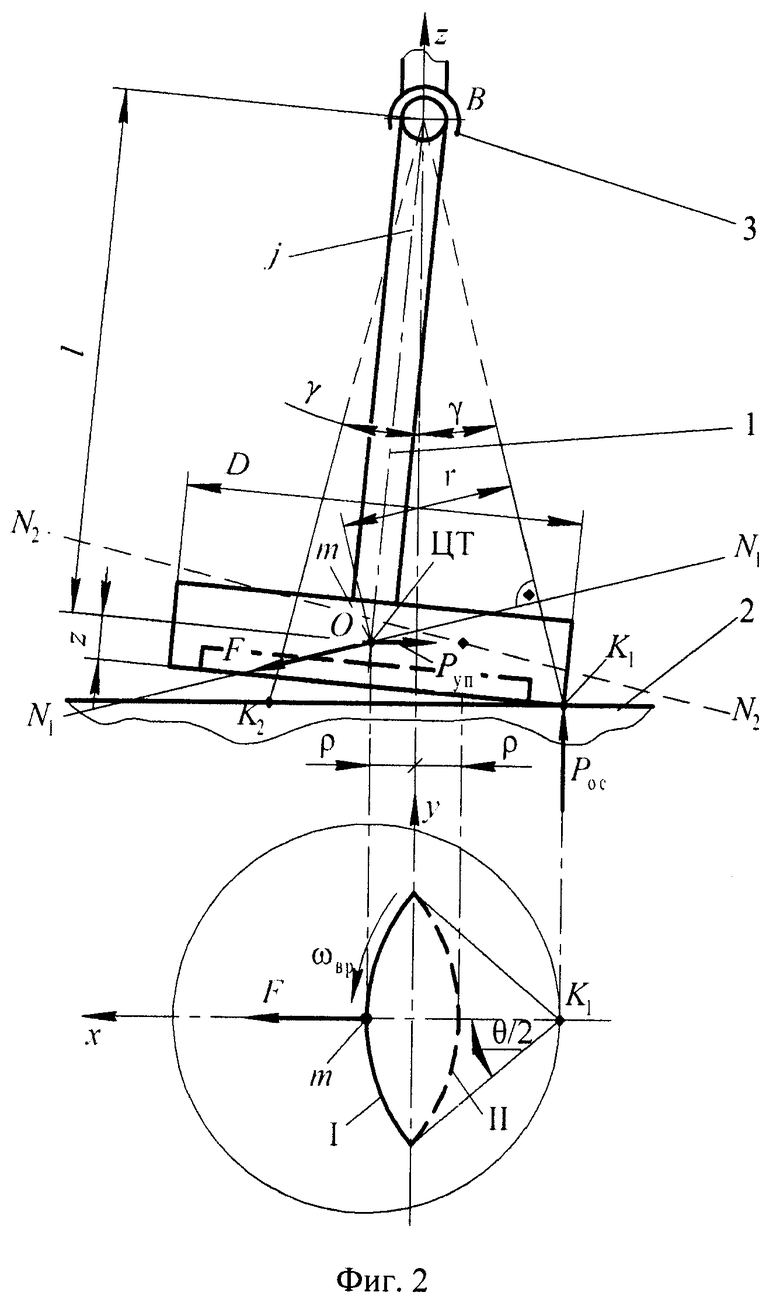
на фиг.2 показана динамическая схема колебательной системы при минимальном смещении тела вращения;
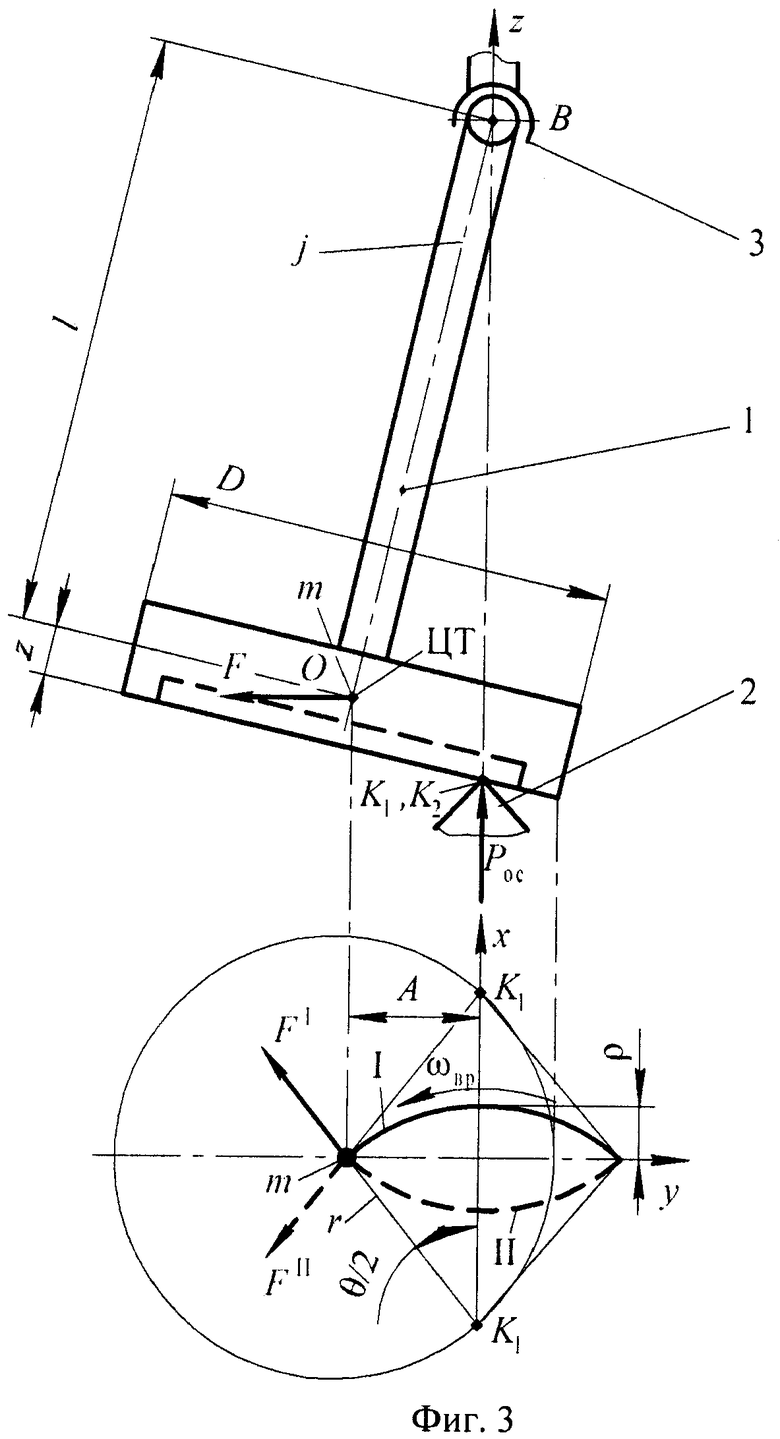
на фиг.3 показана динамическая схема колебательной системы при максимальном смещении тела вращения;
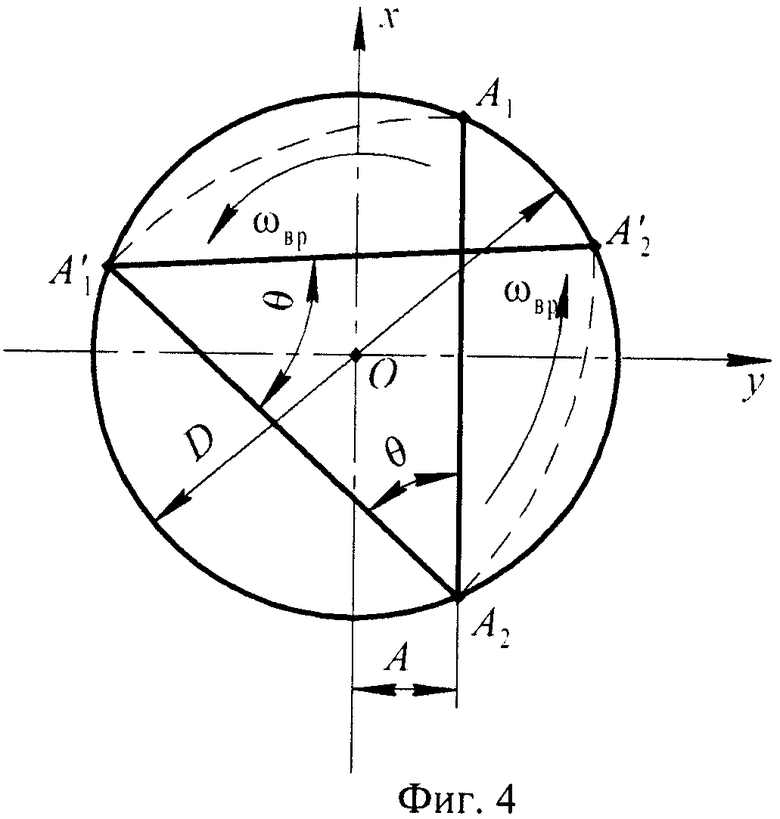
на фиг.4 показана расчетная схема для определения частоты колебаний;
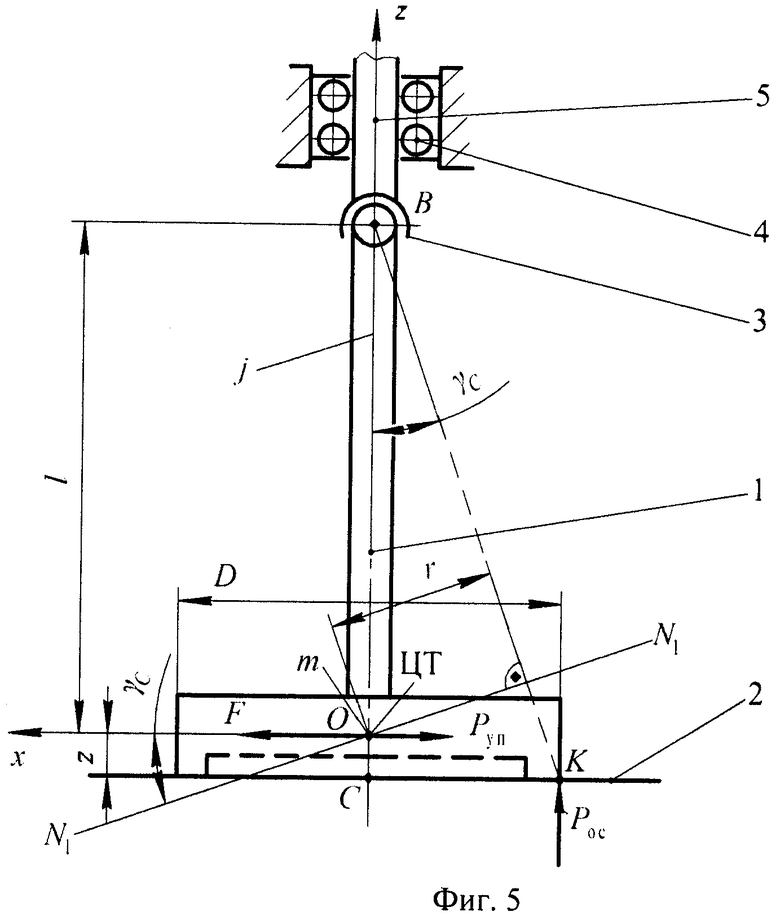
на фиг.5 показана статическая расчетная схема колебательной системы при минимальном смещении тела вращения;
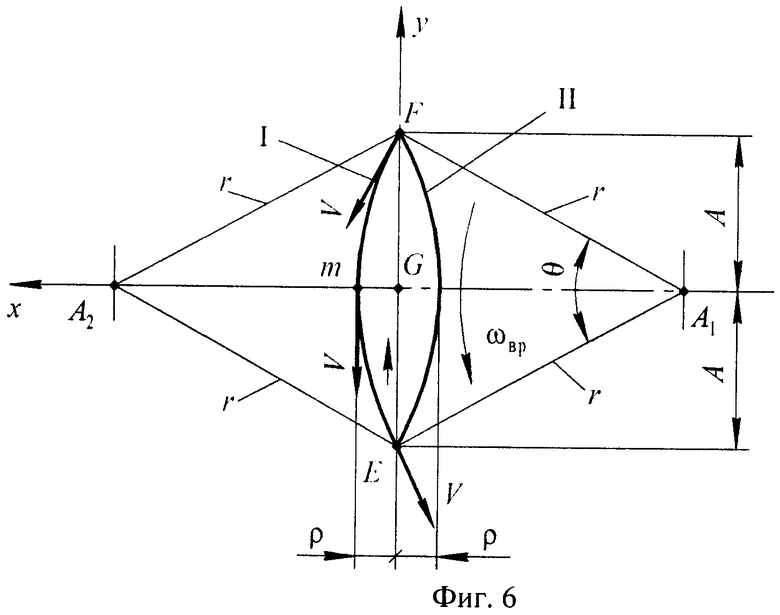
на фиг.6 показана расчетная схема для определения амплитуды колебаний.
Способ возбуждения колебаний (фиг.1) заключается в том, что тело вращения 1, установленное в подшипниках качения 4, перемещают в осевом направлении и поджимают тем самым торцовой поверхностью с требуемым осевым тарированным усилием Pос к контртелу 2 с треугольным профилем. Затем от приводов М вращения через приводной вал 5 и жесткую муфту либо упругий элемент качания 3 осуществляется вращение тела вращения с частотой вращения ωвр. В результате происходит смещение продольной оси тела вращения (в плоскости контакта с контртелом) от оси поворотной симметрии с последующим (в установившемся режиме) обкатыванием тела вращения по поверхности сопряженного с ним контртела по незамкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории. При этом кинематически неуравновешенный центр тяжести тела вращения совершает близкие к прямолинейным поперечные колебания. Таким образом, кинематически неуравновешенная масса тела вращения вызывает колебания всей системы.
Данный способ возбуждения колебаний отличается от прототипного не только формой контртела, но и принципом образования колебаний сосредоточенной массы тела вращения.
Рассмотрим динамические схемы колебательной системы в установившемся режиме, соответствующие экстремальным положениям центра тяжести (ЦТ) тела вращения (фиг.2, 3).
В положении минимального смещения центра тяжести тела вращения массы m на величину ρ (фиг.2), в установившемся режиме колебательной системы, на систему действует осевая тарированная сила Pос прижима тела вращения 1 к контртелу 2, сила упругости Pуп тела вращения

и центробежная вынуждающая сила F, зависящая от параметров круговых колебаний центра тяжести вращаемого тела вращения вокруг оси A1B

где ρ - минимальное смещение центра тяжести тела вращения (по оси x), обусловленное действием центробежной вынуждающей силы;
j - жесткость тела вращения;
r - радиус вращения центра тяжести тела вращения;
ωвр - частота вращения тела вращения.
Касание тела вращения по периферийной окружности торцовой поверхности с контртелом будет происходить в ходе установившегося режима колебаний только в двух точках K1 и K2.
Причем одновременное касание по этим точкам будет происходить дважды за цикл колебаний центра масс тела вращения при наибольшей амплитуде колебаний А. Свое нормальное ускорение центр тяжести тела вращения получает при вращении тела вращения вокруг оси K1B в первый полупериод колебаний (I) и вокруг оси K2B во второй полупериод (II). Вращение центра тяжести тела вращения вокруг оси A1B происходит в плоскости N1-N1, нормальной к оси K1B, по радиусу r. В этой же плоскости N1-N1 действует центробежная сила F массы m тела вращения.
В положении максимального смещения центра тяжести тела вращения массы m на амплитуду А (фиг.3), в установившемся режиме колебательной системы, колебательная система находится за мгновение до соприкосновения тела вращения с контртелом в точке K2. В этот момент текущий угол θ/2 между направлением центробежной силы F и осью x будет достигать своего наибольшего амплитудного значения и амплитуда отклонения центра инструмента достигнет также наибольшей амплитуды А, соответствующей завершению траектории I движения в первый полупериод колебаний.
Через мгновение произойдут плавные переходы соприкосновений тела вращения с контртелом: из точки K1, по прямой K1K2, в точку K2. Затем, когда тело вращения соприкоснется с контртелом в точке K2, ось вращения тела вращения мгновенно перейдет из K1B в K2B и касание в точке K1 исчезнет. Центр тяжести тела вращения начнет движение по траектории II во втором полупериоде колебаний, а центробежная сила F резко изменит направление с FI на FII и будет действовать в плоскости N2-N2.
Затем при вращении тела вращения вокруг оси K2B точка K2 переместится в точку K1 на торцовой поверхности тела вращения и полный цикл колебаний центра тяжести тела вращения завершится.
Величина амплитуды А будет больше величины минимального смещения ρ центра тяжести тела вращения вследствие уменьшения расстояния между направлением действия осевой тарированной силы Pос прижима тела вращения к контртелу и осью симметрии z, а следовательно, и уменьшения возвращающего момента от силы Pос (см. фиг.2, 3).
Оси вращения центра тяжести тела вращения K1B и K2B располагаются симметрично продольной центральной оси z системы (см. фиг.3) под углом γ к этой оси. Под этим же углом располагаются плоскости движения центра сверла N1-N1 и N2-N2 в полупериодах колебаний.
Если контактные точки K1 и K2 на контртеле не изменяют своих положений в установившемся режиме колебаний, то тело вращения по периферийной окружности торцовой поверхности каждый раз контактирует в разных точках с контртелом, что вызвано различием длины отрезка K1K2 и диаметра D тарелки тела вращения в зоне его сопряжения с контртелом, причем K1K2<D.
Это различие, в свою очередь, вызывает увеличение частоты колебаний центра тяжести тела вращения ω по сравнению с частотой ωвр вращения.
Действительно, при смещении центра тяжести тела вращения на амплитуду A длина отрезка A1A2 будет меньше диаметра D торцовой поверхности тела вращения в зоне сопряжения с контртелом (фиг.4) и при вращении тела вращения вокруг оси K2B во втором полупериоде колебаний следующий контакт тела вращения с контртелом произойдет в точке K'1 на теле вращения. Затем при вращении тела вращения вокруг оси K1B следующий контакт тела вращения с контртелом произойдет в точке K'2 на торцовой поверхности тела вращения. Так будет происходить в каждом полном цикле колебаний центра тяжести тела вращения. При этом обкатывание тела вращения по поверхности сопряженного с ним контртела будет происходить по незамкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории.
Угол θ смещения контактных точек будет оставаться постоянным, следовательно, через него можно выразить соотношение частоты вращения тела вращения и частоты колебаний тела вращения
 .
.
Отсюда получим выражение для частоты колебаний

Определим минимальное смещение ρ центра тяжести тела вращения. Учитывая, что отношение минимального смещения центра тяжести тела вращения к его длине ρ/l мало, можно считать, согласно принципу Навье, при определении усилий тело вращения недеформируемым, т.е. при рассмотрении статического равновесия тела вращения можно величиной угла отклонения оси вращения тела вращения пренебречь и рассматривать статическую схему нагружения тела вращения (фиг.5).
Составим уравнение равновесия колебательной системы в плоскости xOz

из которого получим выражение для центробежной вынуждающей силы

где l - вылет тела вращения;
z - координата центра тяжести тела вращения;
γC - статический угол оси вращения центра тяжести тела вращения.
С учетом выражений (1) и (2) уравнение (4) примет вид

Отсюда

Величина радиуса r вращения центра тяжести тела вращения определяется только геометрическими параметрами тела вращения и всегда остается постоянной и равной

Выразим аргументы угла γC.
Из ΔBCK:


Подставим полученные выражения (8) и (9) в выражение (7), получим

Тогда, с учетом (8) и (10), выражение (6) примет вид

Минимальное смещение ρ центра тяжести тела вращения и амплитуда А колебаний центра тяжести тела вращения связаны между собой геометрически.
Развернем плоскости вращения центра тяжести N1-N1 и N2-N2 тела вращения на плоскость xOy (фиг.6)
Из ΔA1EF
(EA1)2=(EG)2=(GA1)2.
Так как
EA1=r; EG=A; GA1=r-ρ,
r2=A2+(r-ρ)2.
Отсюда

Подставим в выражение (12) выражения (10) и (11), получим
Для оценки частоты колебаний по формуле (4) выразим угол θ смещения контактных точек на торцовой поверхности тела вращения в зоне сопряжения с контртелом (фиг.6).
Вследствие малости дуги I длина ее хорды EF может быть приближенно принята равной длине дуги (Ландсберг, Г.С. Элементарный учебник физики: Учебное пособие в 3-х томах / под ред. Г.С.Ландсберга. - Т.1. Механика. Теплота. Молекулярная физика. - 10-е изд., перераб. - М.: Наука, 1985. - С.69-70). Принимая длину дуги lд равной длине хорды для углов менее 15°, мы допускаем ошибку 0,1%, которой вполне можно пренебречь. В этом случае и траекторию движения центра тяжести тела вращения можно считать прямолинейной.
Тогда

Подставив полученное выражение (15) в выражение (3), получим

Определить частоту колебаний можно и по законам кинематики.
Рассмотрим равномерное движение центра тяжести тела вращения по криволинейной траектории. Возьмем два крайних положения F и Е движущегося центра тяжести тела вращения, разделенных промежутком времени t, в течение которого будет пройдет путь, равный длине lд дуги FE. Скорости движущегося центра тяжести тела вращения в F и Е равны по модулю, но различны по направлению (см. фиг.6)
V=ωврr.
Вследствие малости дуги криволинейной траектории, длина ее хорды приближенно принимается равной длине дуги, то есть
lд=2А.
Тогда время t, в течение которого центр тяжести тела вращения пройдет путь, равный длине lд дуги, будет определяться как отношение длины пути движения (длины дуги) к скорости этого движения
Такое же время будет затрачено и на прохождение второго (II) полупериода колебаний. Следовательно, полный период колебаний центра тяжести тела вращения будет равен

По периоду колебаний можно определить частоту этих колебаний
или, с учетом (10)

Принимая, что координата z центра тяжести и радиус D/2 тела вращения в зоне сопряжения с контртелом много меньше вылета l тела вращения (z<<l, D<<2l), получим следующие выражения:
для амплитуды колебаний

для частоты колебаний

Полученные колебания могут передаваться на рабочий орган вибрационной машины или технологическую среду непосредственно с тела вращения или контртела. При этом при незначительных частотах вращения тел вращения можно стабильно получать частоты колебаний, в десятки и сотни раз превышающие частоты вращения. И при этом варьируя значительным количеством исходных параметров, регулируют частоту и амплитуду этих колебаний в широком диапазоне. Управляют параметрами колебаний путем изменения осевой тарированной силы прижима, путем изменения массы тела вращения, путем изменения вылета вращаемого тела, путем изменения частоты вращения тела вращения, путем изменения диаметра тела вращения в зоне его сопряжения с контртелом, путем изменения жесткости стержня тела вращения.
Ожидается ощутимый экономический эффект от внедрения способа возбуждения колебаний, так как в современных вибрационных установках для создания различных по параметрам колебаний используется несколько вибровозбудителей, каждый из которых возбуждает колебания определенных неизменяемых параметров: частоты и амплитуды, или эти параметры сложно регулируемы. Поэтому при замене известных конструкций вибровозбудителей на вибровозбудители, которые будут основаны на предлагаемом способе, за счет повышения эффективности существенно снизится их стоимость.
Промышленная применимость, таким образом, предлагаемого способа может быть реализована в вибрационных машинах, применяемых в строительстве, транспорте, металлообработке, станкостроении, горной и других отраслях промышленности, где используется вибрация.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2019 |
|
RU2725900C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2009 |
|
RU2410166C1 |
| Способ возбуждения колебаний | 2020 |
|
RU2739160C1 |
| Способ возбуждения круговых колебаний и устройство для его осуществления | 1988 |
|
SU1664412A1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2013 |
|
RU2533743C1 |
| СПОСОБ ПЕРЕМЕШИВАНИЯ ЖИДКОСТИ | 2013 |
|
RU2543204C2 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2019 |
|
RU2716862C1 |
| Способ активации процесса перемешивания жидких сред и устройство для его реализации | 2019 |
|
RU2720149C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347627C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕЗКИ СТЕКЛА | 2003 |
|
RU2248944C1 |
Изобретение относится к вибрационной технике и может быть использовано в вибрационных машинах, применяемых в строительстве, транспорте, металлообработке, станкостроении, горной и других отраслях промышленности, где используется вибрация. Сущность изобретения заключается в том, что в способе возбуждения колебаний, согласно изобретению, тело вращения сопрягают с контртелом тарированной силой прижима и обкатывают его по последнему с частотой, меньшей частоты генерируемых колебаний, при этом тело вращения обкатывают по незамкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, причем частотой колебательных движений управляют по соотношению  а амплитудой по формуле
а амплитудой по формуле  , где Pос - величина осевой тарированной силы прижима тела вращения к контртелу; ωвр - частота вращения тела вращения; m - масса тела вращения; l - вылет тела вращения; j - жесткость стержня тела вращения; D - диаметр тела вращения в зоне его сопряжения с контртелом. Технический результат, достигаемый от реализации заявленного изобретения, заключается в повышении эффективности использования вибрационных машин, которое заключается в расширении возможностей регулирования параметров возбуждаемых колебаний посредством настройки прямолинейной формы возбуждаемых колебаний и упрощения регулирования их параметрами. 6 ил.
, где Pос - величина осевой тарированной силы прижима тела вращения к контртелу; ωвр - частота вращения тела вращения; m - масса тела вращения; l - вылет тела вращения; j - жесткость стержня тела вращения; D - диаметр тела вращения в зоне его сопряжения с контртелом. Технический результат, достигаемый от реализации заявленного изобретения, заключается в повышении эффективности использования вибрационных машин, которое заключается в расширении возможностей регулирования параметров возбуждаемых колебаний посредством настройки прямолинейной формы возбуждаемых колебаний и упрощения регулирования их параметрами. 6 ил.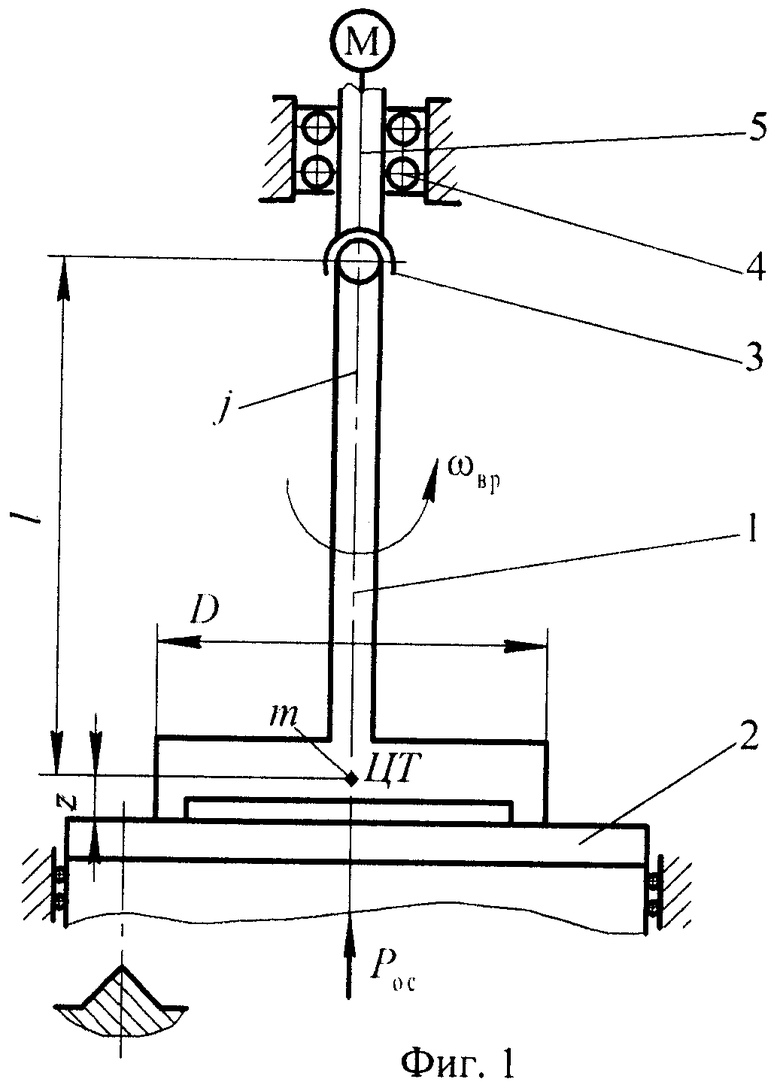
Способ возбуждения колебаний, заключающийся в том, что тело вращения сопрягают с контртелом тарированной силой прижима и обкатывают его по последнему с частотой, меньшей частоты генерируемых колебаний, отличающийся тем, что тело вращения обкатывают по незамкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, причем частотой колебательных движений управляют по соотношению
а амплитудой по формуле
где Pос - величина осевой тарированной силы прижима тела вращения к контртелу;
ωвр - частота вращения тела вращения;
m - масса тела вращения;
l - вылет тела вращения;
j - жесткость стержня тела вращения;
D - диаметр тела вращения в зоне его сопряжения с контртелом.
| Способ возбуждения круговых колебаний и устройство для его осуществления | 1988 |
|
SU1664412A1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347627C1 |
| US 6504278 B1, 07.01.2003 | |||
| Умножитель напряжения | 1989 |
|
SU1617489A1 |

