Изобретение относится к вибрационной технике и может быть использовано в вибрационных станках для переработки отходов различных материалов во вторичное сырье, вибрационных машинах, применяемых в строительстве, транспорте, медицине, металлообработке, сельском хозяйстве, пищевой, горной и других отраслях промышленности.
Известен способ возбуждения направленных колебаний [1], при котором инерционным массам (дебалансам) сообщают вращение, а затем реверсируют эти массы в соответствии с заданной программой изменения колебаний, несколько расширяя тем самым диапазон регулирования колебаний.
Этот способ возбуждения колебаний посредством инерционных масс имеет ограниченное применение, так как частота возбуждаемых колебаний всегда равна частоте вращения, кроме того: «Применение инерционных вибраторов в низкочастотных машинах требует увеличения неуравновешенных масс, а для высокочастотных машин приводит к перегрузке подшипников. В крупных, мощных вибрационных машинах, эксплуатируемых на средних частотах, инерционные вибраторы незаменимы, так как позволяют при малых габаритах и массе создать значительные возмущения. Вследствие значительного времени пуска и выбега, применение инерционных вибраторов в питателях и точных дозаторах ограничено» [2].
Известен способ возбуждения высокочастотных колебаний, реализованный в устройствах [3], при котором дебалансу (вращаемому телу) сообщают вращение вокруг своей оси и за счет центробежных сил планетарное движение по внутренней поверхности корпуса, а частота генерируемых колебаний значительно превышает частоту вращения
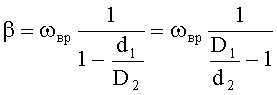
где β - частота генерируемых колебаний;
ωвр - частота вращения вращаемого тела;
d1 - диаметр направляющей в крышке корпуса;
D2 - диаметр отверстия в торце дебаланса со стороны направляющей диаметром d1 в крышке корпуса;
D1 - диаметр отверстия во второй крышке корпуса;
d2 - диаметр выступа на торце дебаланса со стороны крышки с отверстием диаметром D1, установленной в корпусе.
К недостаткам данного способа можно отнести низкие эксплуатационные возможности, а именно отсутствие возможности управлять формой траектории колебательного движения, отсутствие регулирования частоты генерируемых колебаний ограничивается изменением скорости вращения дебаланса вокруг своей оси. Регулирование амплитуды осуществляется только изменением гарантированного зазора между сопрягающимися поверхностями дебаланса и крышек корпуса, в силу этого возникают значительные затруднения в обеспечении регулирования частоты и амплитуды генерируемых колебаний. Недостатком этого способа является и то, что при значительных силах сопротивления (например, вязкости технологической среды, в которой создается вибрационное поле) при снятии колебаний с дебаланса, центробежной силы может не хватить для прижима дебаланса к беговой дорожке и высокочастотные колебания не возникнут. Это не позволяет эффективно использовать данный способ.
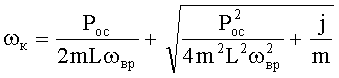
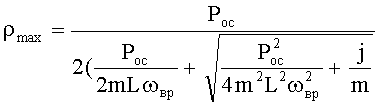
Известен способ возбуждения круговых колебаний [4], взятый за прототип, при котором вращаемое тело и контртело сопрягают с тарированной силой прижима так, чтобы область контакта имела замкнутую форму с поворотной симметрией, одно из сопрягаемых тел приводят во вращение вокруг оси поворотной симметрии области контакта, при этом частотой колебательных движений управляют по соотношению
а их амплитудой по соотношению
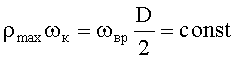
с сохранением постоянства соотношения
где Рос - величина осевой тарированной силы прижима вращаемого тела к контртелу;
ωвр - частота вращения вращаемого тела;
m - масса вращаемого тела;
L - вылет вращаемого тела;
j - жесткость ротора;
D - диаметр вращаемого тела в зоне его сопряжения с контртелом.
Недостатком данного способа является отсутствие возможности управления формой траектории колебательного движения, поскольку она всегда круговая.
Технической задачей является устранение указанных недостатков, а именно, повышение эффективности и универсальности способа возбуждения колебаний, которые заключаются в обеспечении возможности управления формой траектории колебательного движения и возможности одновременного получения высокочастотной и низкочастотной составляющей колебаний, их синхронизации и возможности регулирования параметров этих колебаний.
Поставленная техническая задача достигается тем, что в способе возбуждения колебаний вращаемое тело и контртело сопрягают с тарированной силой прижима и обкатывают его по замкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории и одновременно воздействуют на них неуравновешенной радиальной силой, постоянно меняя ее направление с частотой вращения тела, при этом суммарной амплитудой колебаний управляют по соотношению

где
Δω=ω1+ω2;
F2 - неуравновешенная радиальная сила;
ω1 - частота колебаний вращаемого тела;
ω2 - частота вращения;
r1 - радиус вращаемого тела;
М - суммарная масса тел;
t - время.
Благодаря набору технических приемов, последовательности действий и их функциональным связям, а именно тому, что повышение эффективности способа возбуждения колебаний и универсальности достигается вследствие возможности получения сложных механических колебаний с низко- и высокочастотной составляющей и обеспечения, при этом возможности управления амплитудой и частотой высокочастотной составляющей этих колебаний, а также обеспечения за счет этого даже возможности управления формой траектории результирующего колебательного движения, можно сделать вывод о соответствии критерию «изобретательский уровень».
Сущность изобретения поясняется чертежами,
где на фиг. 1 показана схема возбуждения колебаний при принудительном воздействии радиальной неуравновешенной силы на вращаемое тело;
на фиг. 2 показана схема формирования траектории вибрационных перемещении для схемы фиг. 1);
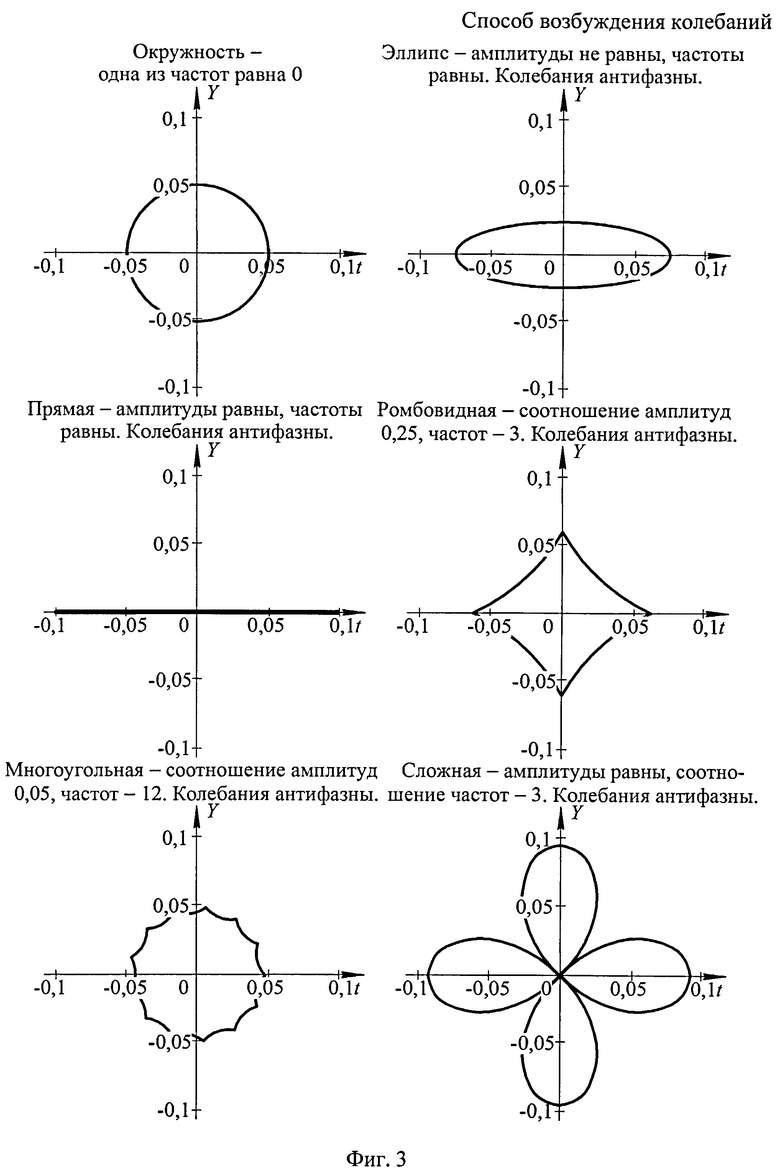
на фиг. 3 показаны примеры некоторых возможных форм траекторий создаваемых виброперемещений (получены в ходе расчетов).
В схеме заявляемого способа возбуждения колебаний (см. фиг. 1) тело 1 вращают с частотой ω2 и сопрягают торцовой поверхностью с контртелом 3 с тарированной силой прижима Рос, обкатывая вращаемое тело 1 по замкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории. Вращаемому телу 1 в виде гибкого стержня с радиальной жесткостью j сообщают вращение с частотой ω2 и сопрягают его торцовой поверхностью с неподвижным контртелом 3. При этом согласно [4] образуются центры мгновенного качения, а вращаемое тело 1 совершает круговые высокочастотные колебания ω1, обкатываясь периферией торца по поверхности контртела 2. Вместе с тем, когда на вращаемое тело воздействуют неуравновешенной радиальной силой F2 и постоянно меняют ее направление с частотой вращения тела ω2, на фоне высокочастотных колебаний ω1, возбуждаются низкочастотные ω2 и, синхронизируясь, обретают модулирующие свойства.
Для пояснения сущности способа рассмотрим изменение радиуса-вектора суммарной амплитуды колебаний (см. фиг. 2), для определения траектории виброперемещений и формы колебаний, создаваемых при заявляемом способе. Для общего случая действия двух колебаний с разными амплитудами и частотами рассмотрим движение радиуса-вектора суммарной амплитуды А колебаний с углом поворота α.

где А1 - радиус-вектор амплитуды колебаний вращаемого тела;
А2 - радиус-вектор амплитуды колебаний неуравновешенной радиальной силы F2.
Система уравнений проекций колебаний системы

где
 и
и 
Тогда система уравнений (2) примет вид:

где ω1 - частота колебаний вращаемого тела
А1X, А1Y - проекции радиуса-вектора амплитуды колебаний вращаемого тела соответственно на оси ОХ и OY;
ω2 - частота вращения;
А2X, А2Y - проекции радиуса-вектора амплитуды колебаний неуравновешенной радиальной силы F2, соответственно на оси ОХ и OY;
AX, АY - проекции радиус-вектора суммарных колебаний, соответственно на оси ОХ и OY.
Введем обозначение ω1+ω2=Δω и в уравнениях (3) заменим ω1 на Δω-ω2, уравнения примут вид:


Используя формулы синуса суммы углов и косинуса суммы углов, преобразуя систему уравнений (4), получим систему уравнений

В уравнениях системы (6) вынесем общий множитель за скобки и получим систему уравнений

Введем обозначения

Система уравнений (7) примет вид

Используя формулы синуса суммы углов и косинуса суммы углов, преобразуя систему уравнений (9), получим систему уравнений

Из уравнений (8) находим сдвиг фаз угла поворота радиуса-вектора колебаний А, разделив одно уравнение на другое
Возведем уравнения (8) в квадрат и сложим

Используя формулы квадрата суммы и основного тригонометрического тождества, упростим уравнение (12) и получим

Из уравнения (13) находим амплитуду радиуса-вектора колебаний А

Из уравнения (10) видно, что угол поворота α радиуса-вектора колебаний А равен

Возведем уравнения (10) в квадрат и сложим

Из приведенных уравнений видно, что полученное каноническое уравнение движения радиуса-вектора колебаний А в конечном счете зависит от частот ω1 и ω2 и амплитуд A1 и A2 колебаний вращаемого тела и неуравновешенной радиальной силы F2, а траектория может меняться от квазикруговой до линейной, а при определенных условиях даже иметь форму многоугольника или фигур Лиссажу, что и подтверждают компьютерные расчеты (см. фиг.3). Для определения амплитуды радиуса-вектора колебаний А воспользуемся уравнением (14), при этом амплитуда высокочастотных колебаний А1 равна

где r1 - радиус вращаемого тела.
Амплитуда низкочастотных колебаний A2 равна

где F2 - неуравновешенная радиальная сила;
ω2 - частота вращения;
M - суммарная масса тел;
Подставим выражения (17) и (18) в (14), получим

Введем коэффициенты
и подставим их в уравнение (19)

В этом выражении первое слагаемое под корнем (r1n)2 - частотная составляющая или «высокочастотная составляющая», второе слагаемое (F2k)2 - составляющая, зависящее от массы или «низкочастотная» составляющая, а третье слагаемое 2r1F2nkcos(Δωt) - составляющая разности фаз колебаний Δωt. Используя зависимость (20), управляют величиной амплитуды A, изменяя параметры этих составляющих. Параметры колебаний неуравновешенной силы задают посредством изменения скорости вращения ω2 и самой силы F2. Параметрами колебаний вращаемого тела управляют посредством изменения осевой силы Рос в соответствии с зависимостями, приведенными в [4]. В результате формой траектории колебательных перемещений управляют посредством изменения частоты и амплитуды колебаний вращаемого тела и неуравновешенной радиальной силы.
В соответствии с предлагаемым способом была испытана в лабораторных и производственных условиях модель способа генерации колебаний сложной формы. Испытания показали работоспособность способа и его эффективность. Ожидается экономический эффект от внедрения и использования предлагаемого способа за счет возможности генерации управляемых сложных колебаний, требуемой формы одним вибровозбудителем.
Промышленное применение предлагаемого способа может найти, например, в различных отраслях в виброприводах измельчителей для переработки отходов упруговязких материалов в качественное вторичное сырье в виде измельченных частиц с требуемыми формой и размерами.
Источники информации, принятые во внимание
1. A.c. СССР №869844, МКИ B06B 1/16. Способ возбуждения направленных колебаний / А.С. Шаволов. - №2839685/18-28, заявл. 11.11.79, опубл. 07.10.81, Бюл. №37.
2. С.Н. Кожевников. Механизмы / С.Н. Кожевников, Я.И. Есипенко, Я.М. Раскин. - М.: Машиностроение, 1976. - стр. 665.
3. С.Н. Кожевников. Механизмы / С.Н. Кожевников, Я.И. Есипенко, Я.М. Раскин. - М.: Машиностроение, 1976. - стр. 667-671.
4. А.с. СССР 1664412, МКИ B06B 1/15. Способ возбуждения круговых колебаний и устройство для его осуществления / С.Г. Лакирев, Я.М. Хилькевич, С.В. Сергеев. - №4414912/24-28; заявл. 24.04.88; опубл. 23.07.91, Бюл. №27. - 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2019 |
|
RU2716862C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2019 |
|
RU2725900C1 |
| Способ возбуждения колебаний | 2020 |
|
RU2739160C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2009 |
|
RU2410166C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2011 |
|
RU2476275C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ЗАКОНА МЕХАНИЧЕСКИХ КОЛЕБАНИЙ СИЛОВЫХ ФАКТОРОВ В ЦЕНТРОБЕЖНОМ ВИБРОВОЗБУДИТЕЛЕ | 2015 |
|
RU2584850C1 |
| Способ активации процесса перемешивания жидких сред и устройство для его реализации | 2019 |
|
RU2720149C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ СИЛОВЫХ ФАКТОРОВ С ПРОГНОЗИРУЕМЫМИ ПАРАМЕТРАМИ | 2012 |
|
RU2528550C2 |
| СПОСОБ ВОЗБУЖДЕНИЯ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ СИЛОВЫХ ФАКТОРОВ С РЕГУЛИРУЕМЫМИ ПАРАМЕТРАМИ | 2015 |
|
RU2578257C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И ФАЗЫ ДИСБАЛАНСА | 2006 |
|
RU2310178C1 |

Изобретение относится к вибрационной технике и может быть использовано в вибрационных станках для переработки отходов различных материалов во вторичное сырье, вибрационных машинах, применяемых в строительстве, транспорте, медицине, металлообработке, сельском хозяйстве, пищевой, горной и других отраслях промышленности. Сущность изобретения заключается в том, что в способе возбуждения колебаний вращаемое тело и контртело сопрягают с тарированной силой прижима и обкатывают его по замкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, и одновременно воздействуют на них неуравновешенной радиальной силой, постоянно меняя ее направление с частотой вращения тела, при этом суммарной амплитудой колебаний управляют по соотношению

где
Δω=ω1+ω2;
F2 - вращающаяся неуравновешенная радиальная сила;
ω1 - частота колебаний вращаемого тела;
ω2 - частота вращения;
r1 - радиус вращаемого тела;
М - суммарная масса тел;
t - время;
Технический результат - повышение эффективности и универсальности способа возбуждения колебаний, которые заключаются в обеспечении возможности управления формой траектории колебательного движения и возможности одновременного получения высокочастотной и низкочастотной составляющей колебаний, их синхронизации и возможности регулирования параметров этих колебаний. 3 ил.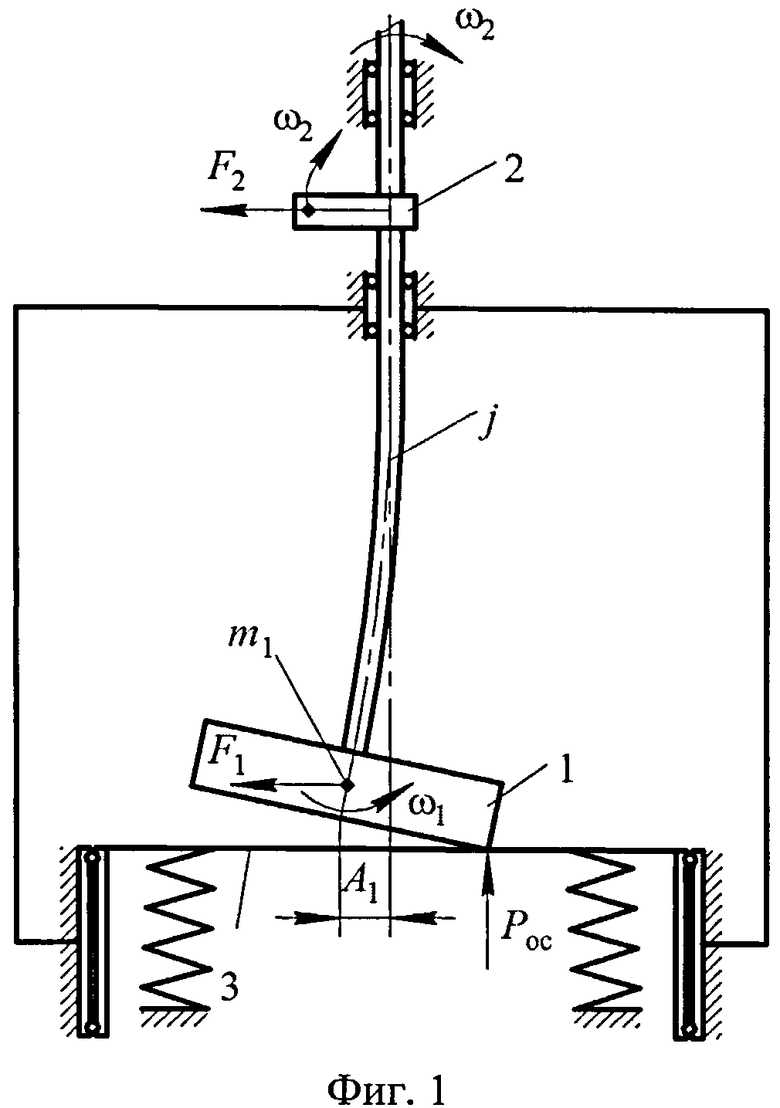
Способ возбуждения колебаний, заключающийся в том, что вращаемое тело и контртело сопрягают с тарированной силой прижима и обкатывают его по замкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, отличающийся тем, что одновременно на них воздействуют неуравновешенной радиальной силой и постоянно меняют ее направление с частотой вращения тела, при этом суммарной амплитудой колебаний управляют по соотношению

где
Δω=ω1+ω2;
F2 - вращающаяся неуравновешенная радиальная сила;
ω1 - частота колебаний вращаемого тела;
ω2 - частота вращения;
r1 - радиус вращаемого тела;
М - суммарная масса тел;
t - время.
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2009 |
|
RU2410166C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347627C1 |
| Способ возбуждения круговых колебаний и устройство для его осуществления | 1988 |
|
SU1664412A1 |
| US 6504278 B1 07.01.2003 | |||

