Изобретение относится к вибрационной технике и может быть использовано в вибрационных станках для переработки отходов различных материалов во вторичное сырье, вибрационных машинах, применяемых в строительстве, транспорте, медицине, металлообработке, сельском хозяйстве, пищевой, горной и других отраслях промышленности.
Известен способ возбуждения круговых колебаний [SU 1664412 А1, «СПОСОБ ВОЗБУЖДЕНИЯ КРУГОВЫХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ», МПК В06В 1/16, опубл. 23.07.1991], при котором вращаемое тело и контртело сопрягают с тарированной силой прижима так, чтобы область контакта имела замкнутую форму с поворотной симметрией, одно из сопрягаемых тел приводят во вращение вокруг оси поворотной симметрии области контакта, при этом частотой колебательных движений управляют по соотношению

а их амплитудой по соотношению
с сохранением постоянства соотношения
где РОС - величина осевой тарированной силы прижима вращаемого тела к контртелу;
ωВР - частота вращения вращаемого тела;
m - масса вращаемого тела;
L - вылет вращаемого тела;
j - жесткость ротора;
D - диаметр вращаемого тела в зоне его сопряжения с контртелом.
Недостатком данного способа является отсутствие возможности получения и управления параметрами объемных вибрационных полей сложной формы, в связи с тем, что способ предназначен только для формирования квазикруговых высокочастотных колебаний в плоскости сопряжения контртела и вращаемого тела.
Известен способ возбуждения колебаний [RU 2533743 С1, «СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ», МПК В06В 1/00, опубл. 20.11.2014], который заключается в том, что вращаемое тело и контртело сопрягают с тарированной силой прижима и обкатывают его по замкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории и одновременно воздействуют на них неуравновешенной радиальной силой, постоянно меняя ее направление с частотой вращения тела, при этом суммарной амплитудой колебаний управляют по соотношению

где 
Δω=ω1+ω2;
F2 - неуравновешенная радиальная сила;
ω1 - частота колебаний вращаемого тела;
ω2 - частота вращения;
r1 - радиус вращаемого тела;
М - суммарная масса тел;
t - время.
Недостатком данного способа является ограниченность его применения, выражающаяся в том, что он предназначен только для формирования квазикруговых высокочастотных амплитудно-модулируемых колебаний в плоскости сопряжения контртела и вращаемого тела, и не позволяет получать объемные амплитудно-модулируемые колебания сложной формы.
Известен способ возбуждения колебаний [RU 2476275 С1, «СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ», МПК В06В 1/16, опубл. 27.02.2013], взятый за прототип, при котором тело вращения сопрягают с контртелом тарированной силой прижима и обкатывают его по последнему с частотой, меньшей частоты генерируемых колебаний по незамкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, причем частотой колебательных движений управляют по соотношению
а амплитудой по формуле

где РОС - величина осевой тарированной силы прижима вращаемого тела к контртелу;
ωВР - частота вращения вращаемого тела;
m - масса вращаемого тела;
 - вылет вращаемого тела;
- вылет вращаемого тела;
j - жесткость стержня вращаемого тела;
D - диаметр вращаемого тела в зоне его сопряжения с контртелом.
Однако способ-прототип имеет недостаток: позволяет получать объемные вибрационные поля только в форме объемной квазинефроиды, например, в виде двух сопряженных через один общий прямолинейный участок (хорду) сегментов, образованных дугами окружности. Причем сегменты расположены в пространстве под углом меньше 180° относительно друг друга. Но невозможно получать объемные амплитудно-модулированные колебания, формирующие вибрационные поля сложной формы. Такие колебания необходимы, например, для задания рабочему органу или инструменту сложных траекторий формообразующих движений в станках для размерного диспергирования твердых сред с целью управления формой и размерами дисперсных частиц [4].
Задачей, на решение которой направлено заявляемое изобретение, является расширение технологических возможностей вибрационных машин, в которых требуется задание рабочему органу сложных формообразующих движений, за счет генерирования и управления сложной формой объемного вибрационного поля, формируемого колебаниями с модулируемыми свойствами.
Для решения поставленной задачи предлагается способ возбуждения колебаний, заключающийся в том, что вращаемое тело сопрягают с тарированной силой прижима с контртелом и обкатывают его по последнему по незамкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, причем частотой колебательных движений управляют по соотношению
а амплитудой А по формуле

где РОС - величина осевой тарированной силы прижима вращаемого тела к контртелу;
ωВР - частота вращения вращаемого тела;
m - масса вращаемого тела;
 - вылет вращаемого тела;
- вылет вращаемого тела;
j - жесткость стержня вращаемого тела;
D - диаметр вращаемого тела в зоне его сопряжения с контртелом, согласно изобретению, одновременно на вращаемое тело и контртело воздействуют неуравновешенной радиальной силой и постоянно меняют ее направление с частотой вращения вращаемого тела, в результате, в системе механически генерируют колебания с модулируемыми свойствами, формирующие объемные вибрационные поля сложной формы.
Сравнение заявленного способа возбуждения с известными позволяет сделать вывод о достижении нового эффекта, выразившегося в возможности генерирования и управления сложной формой объемного вибрационного поля, формируемого колебаниями с модулируемыми свойствами.
Сущность изобретения поясняется чертежами, где
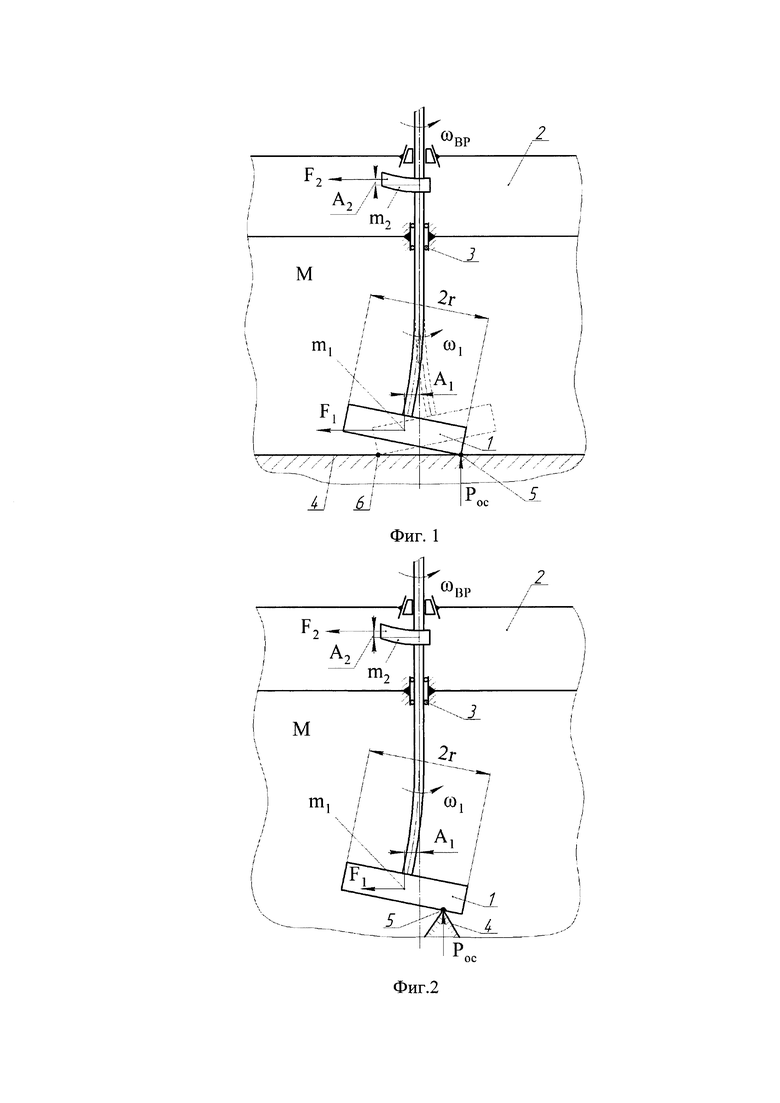
на фиг. 1 показана схема возбуждения колебаний при принудительном воздействии радиальной неуравновешенной силы на вращаемое тело (вид спереди)
на фиг. 2 показана схема возбуждения колебаний при принудительном воздействии радиальной неуравновешенной силы на вращаемое тело (вид сбоку)
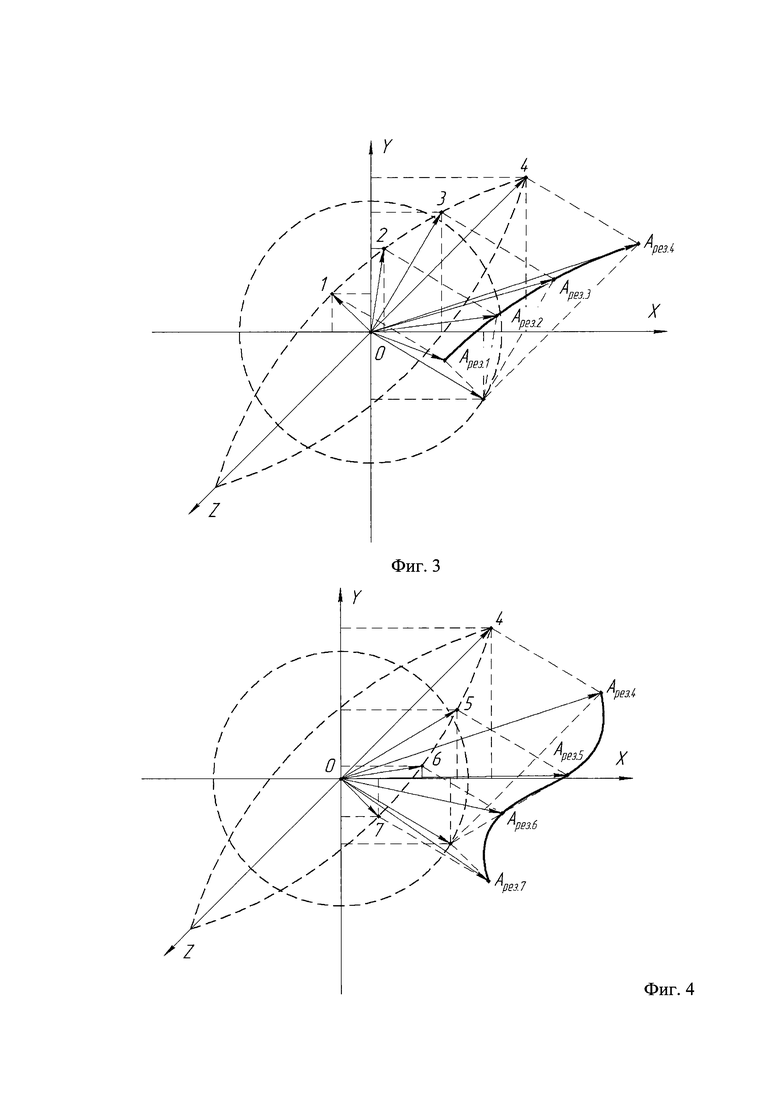
на фиг. 3 показана проекция первого положения радиус-вектора суммарных объемных колебаний вращаемого тела при воздействии на него неуравновешенной радиальной силы в системе координат XOY
на фиг. 4 показана проекция второго положения радиус-вектора суммарных объемных колебаний вращаемого тела при воздействии на него неуравновешенной радиальной силы в системе координат XOY
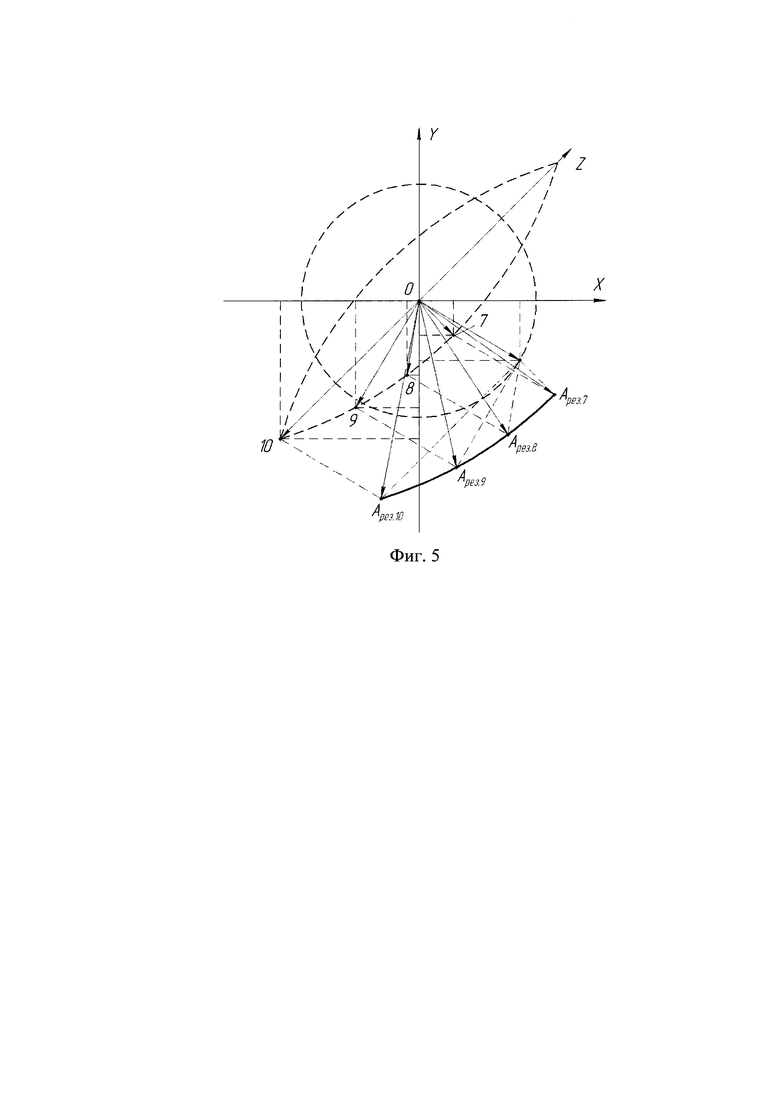
на фиг. 5 показана проекция третьего положения радиус-вектора суммарных объемных колебаний вращаемого тела при воздействии на него неуравновешенной радиальной силы в системе координат XOY
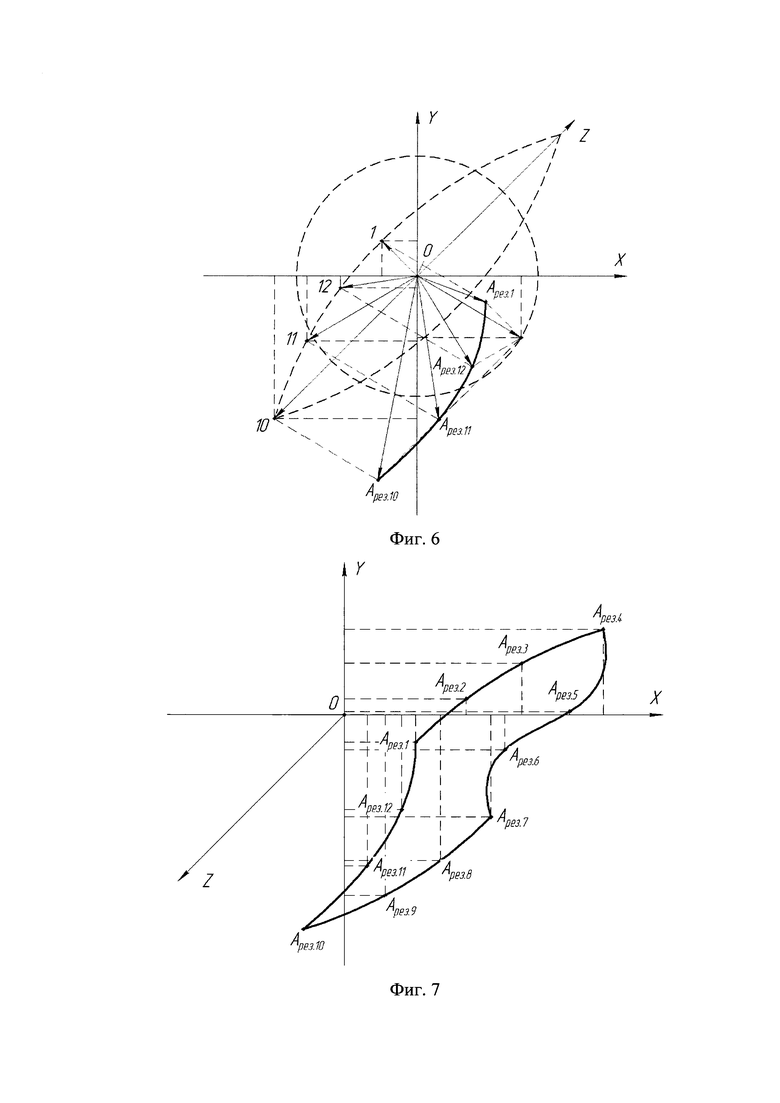
на фиг. 6 показана проекция четвертого положения радиус-вектора суммарных объемных колебаний вращаемого тела при воздействии на него неуравновешенной радиальной силы в системе координат XOY
на фиг. 7 показана проекция результирующей форма суммарных объемных амплитудно-модулируемых колебаний вращаемого тела при воздействии на него неуравновешенной радиальной силы в системе координат XOY
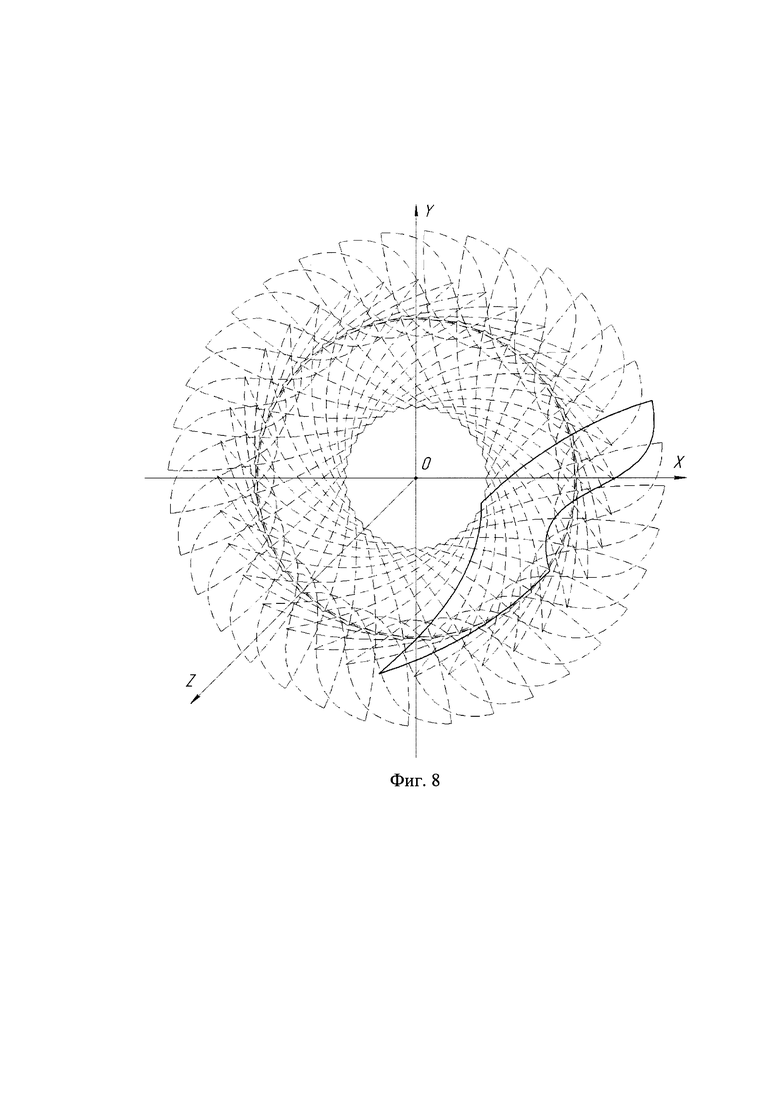
на фиг. 8 показана проекция траектории объемных колебаний системы, сформированная за время Δt в системе координат XOY
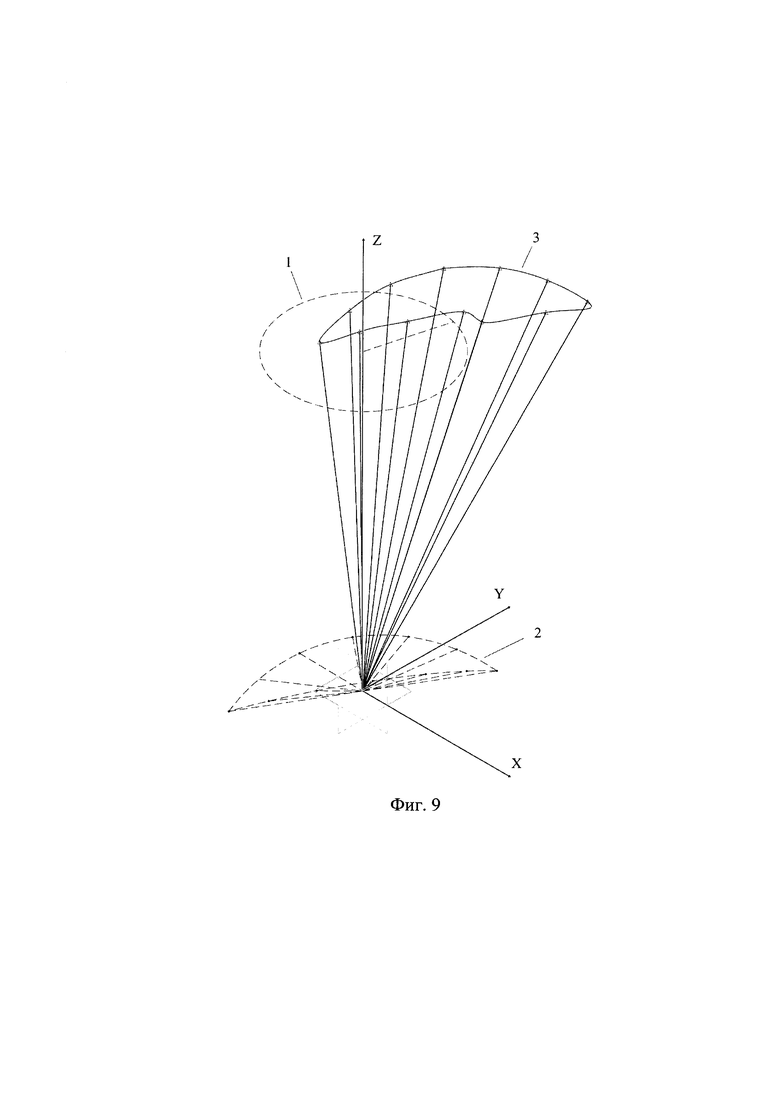
на фиг. 9 показана схема формирования объемных колебаний вращаемого тела при воздействии на него неуравновешенной радиальной силы в трехмерной системе координат
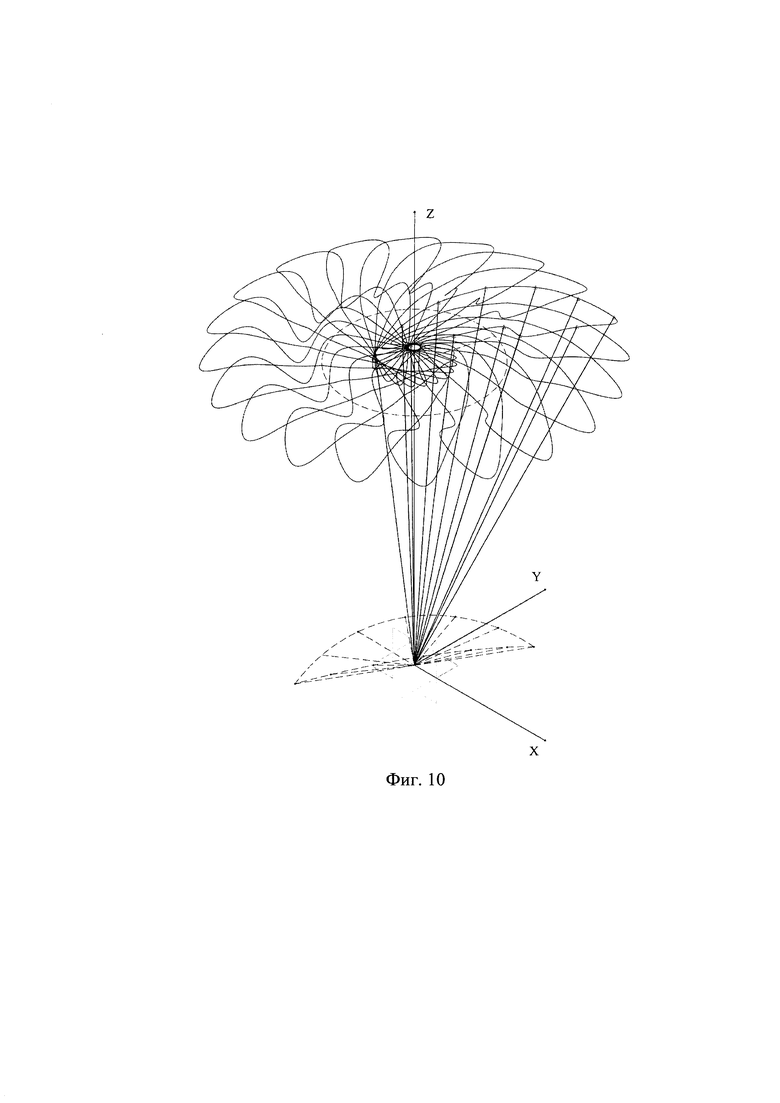
на фиг. 10 схема формирования объемных амплитудно-модулируемых колебаний вращаемого тела при воздействии на него неуравновешенной радиальной силы сформированная за время t в трехмерной системе координат.
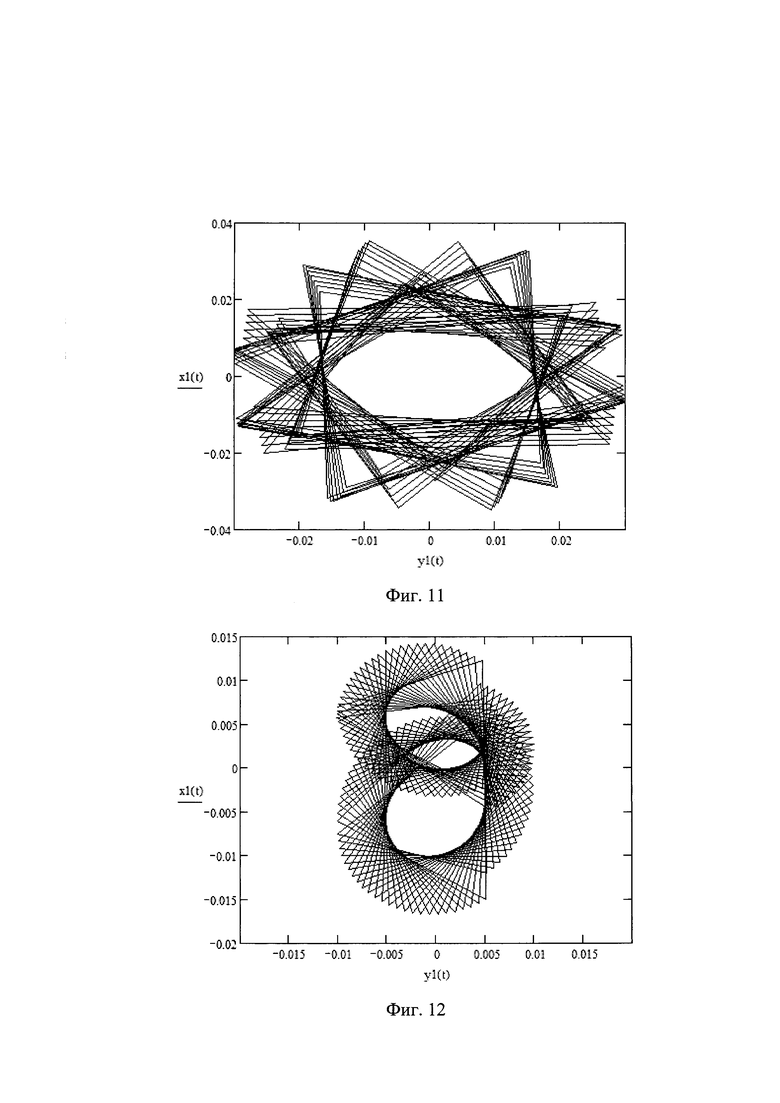
на фиг. 11 показан пример формирования проекции объемных колебаний вращаемого тела с синхронно воздействующей на него неуравновешенной радиальной силой, при ωВР=35 об/мин; РОС=50 Н
на фиг. 12 показан пример формирования проекции объемных колебаний вращаемого тела с синхронно воздействующей на него неуравновешенной радиальной силой, при ωВР=60 об/мин, РОС=125 Н
В схеме заявляемого способа (фиг. 1) возбуждения колебаний вращаемое тело 1 радиусом r и массой m1, в виде стержня с жесткостью j размещенное в корпусе 2 посредством подшипников качения 3, вращают с частотой ωВР и сопрягают с тарированной силой прижима РОС торцовой поверхностью с контртелом 4, имеющим треугольный профиль (фиг. 2). При этом, обкатывают вращаемое тело 1 по незамкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории. В результате чего в точках контакта 5 и 6 вращаемого тела 1 и контртела 4 образуются центры мгновенного качения (поочередно в двух точках треугольного профиля контртела 4), а вращаемое тело 1 совершает высокочастотные колебания ω1 с амплитудой А1, обкатываясь периферией торца по ребру контртела 4. Так формируется объемное вибрационное поле, ограниченное квазинефроидой, например, в виде двух сопряженных через один общий прямолинейный участок (хорду) сегментов, образованных дугами окружности. Причем сегменты расположены под углом меньше 180° относительно друг друга. При этом, одновременно на вращаемое тело 1 воздействуют неуравновешенной радиальной силой F2 массой m2, создаваемой, например, дебалансом, кривошипным пальцем и т.д., и постоянно меняют ее направление с частотой вращения вращаемого тела ωВР. То есть на фоне высокочастотных колебаний ω1, одновременно возбуждают низкочастотные с частотой ωВР и амплитудой А2, которые, синхронизируясь, придают системе еще и модулирующие свойства. Иными словами, генерируют пространственную амплитудно-модулированную квазинефроиду.
Для пояснения сущности способа рассмотрим принцип формирования суммарных колебаний системы на примере пространственной (3D) векторной диаграммы колебаний. В качестве допущения примем, что низкочастотные колебания, возбуждают неуравновешенной радиальной силой F2, частота которых много меньше высокочастотных колебаний, которые возбуждают вращаемым телом 1, в связи с чем изменением положения центра масс неуравновешенной радиальной силы, за рассматриваемый промежуток времени, можно пренебречь. Формируемая траектория центра тяжести вращаемого тела в виде объемной квазинефроиды, например, в виде двух сопряженных через один общий прямолинейный участок (хорду) сегментов, образованных дугами окружности, показана в прототипе. Поочередно рассмотрим четыре положения результирующего радиуса-вектора установившихся колебаний системы в виде проекций на плоскости XOY (фиг. 3, 4, 5, 6).
В первом положении (фиг. 3) центр тяжести вращаемого тела, за счет обкатывания вращаемого тела по ребру сопряженного с ним контртела, перемещают из точки 1 в точку 4 через точки 2 и 3. При этом, при векторном сложении высокочастотных колебаний с низкочастотными, изменяют модуль вектора результирующей амплитуды колебаний системы с Apeз.1 до Арез.4 соответственно. В ходе чего формируют годограф результирующих колебаний системы.
Во втором положении (фиг. 4) центр тяжести вращаемого тела перемещают из точки 4 в точку 7 через точки 5 и 6. При этом модуль вектора амплитуды колебаний системы изменяется с Арез.4 до Арез.7 соответственно.
Третье положение (фиг. 5) характеризуется перемещением центра тяжести вращаемого тела из точки 7 в точку 10 с изменением модуля вектора амплитуды колебаний системы с Арез.7 до Apeз.10.
В четвертом положении (фиг. 6) центр тяжести вращаемого тела перемещают из точки 10 в точку 1 через точки 11 и 12. При этом, при сложении высокочастотных колебаний с низкочастотными, изменяют модуль вектора результирующей амплитуды колебаний системы с Apeз.10 до Apeз.1 соответственно.
Объединив сформированные траектории перемещения радиус-вектора амплитудно-модулированных колебаний получим общий годограф результирующих колебаний (фиг. 7), сформированный системой за рассматриваемый промежуток времени. При увеличении временного интервала, на ряду с перемещением радиус-вектора высокочастотных колебаний, изменяют положение радиус-вектора низкочастотных колебания, что приводит к формированию массива сложных колебаний (фиг. 8).
По причине изменения положения центра тяжести вращаемого тела как в плоскости, так и в пространстве, формируемые синхронные колебания системы могут быть рассмотрены в пространственной прямоугольной системе координат (фиг. 9). В ходе сложения траектории низкочастотных колебаний (1) с траекторией высокочастотных колебаний (2) образуется амплитудно-модулируемая пространственная кривая (3). С течением времени t, вектор суммарных колебаний вращаемого тела и воздействующей на него неуравновешенной радиальной силы будет изменять свое пространственное положение, тем самым формируя массив объемных колебаний системы (фиг. 10).
Пример реализации способа.
Для примера рассмотрим схему возбуждения колебаний, представленную на (фиг. 1), имеющую следующие параметры:
Масса вращаемого тела m1=0,5 кг;
Диаметр вращаемого тела D=0,2 м;
Радиус вращаемого тела r=0,05 м;
Длина вылета стержня 
Частота вращения ротора ωВР=50 с-1;
Осевая тарированная силы РОС=0,5Н;
Диаметр стержня d=0,01 м;
Модуль упругости стержня ЕС=2,14×1010 кгс/м2;
Неуравновешенная радиальная сила F2=12Н;
Суммарная масса тел М=0,8 кг;
Время t=1 с.
Жесткость вращаемого тела равна

Также, как и в прототипе амплитуду колебаний вращаемого тела А1 определяют по зависимости:

где РОС - величина осевой тарированной силы прижима вращаемого тела к контртелу;
ωВР - частота вращения вращаемого тела;
m - масса вращаемого тела;
 - вылет вращаемого тела;
- вылет вращаемого тела;
j - жесткость стержня вращаемого тела;
D - диаметр вращаемого тела в зоне его сопряжения с контртелом.
Частота колебаний вращаемого тела может быть определена по формуле: 
Амплитуда низкочастотных колебаний равна:

где F2 - неуравновешенная радиальная сила;
М - суммарная масса тел.
Подставив в уравнение (1), (2) и (3) заданные числовые значения получим:


Суммарная амплитуда модулированных колебаний может быть определена из уравнения:

Подставив полученные значения амплитуд и частот высокочастотных и низкочастотных колебаний в уравнение (4), найдем значение модулированных колебаний системы:

Для оценки форм колебаний системы выполним математическое моделирование. При значениях частоты вращения ωвр=35 об/мин; и осевой силы Рос=50 Н была получена форма колебаний в виде пространственной квазигипоциклоиды (фиг. 11). При ωвр=60 об/мин, Рос=125 Н годограф результирующих колебаний системы принимает сложную пространственную ассиметричную форму (фиг. 12).
Ожидается ощутимый технический эффект от внедрения способа возбуждения колебаний, так как в современных вибрационных установках для создания колебаний различных по форме пространственных траекторий используются совместно, например, несколько вибровозбудителей, каждый из которых возбуждает колебания определенных неизменяемых параметров: частоты и амплитуды, или эти параметры сложно регулируемы [5, 6]. В большинстве случаев данные вибровозбудители расположены на едином основании, что позволяет генерировать в системе только лишь плоские колебания. Для создания объемных колебаний в системе, зачастую возникает потребность в создании сложных конструктивных решений (например, применение нескольких вибровозбудителей со смещенными осями). Поэтому при замене известных конструкций вибровозбудителей на вибровозбудители, которые будут основаны на предлагаемом способе, за счет расширения технологических возможностей, повышения эффективности существенно снизится их стоимость. Таким образом, исходя из полученных результатов, можно сделать вывод, что поставленная техническая задача решена.
Источники информации, принятые во внимание
1. А.с. 1664412 СССР, МКИ В06В 1/15. Способ возбуждения круговых колебаний и устройство для его осуществления / С.Г. Лакирев, Я.М. Хилькевич, С.В.Сергеев. - №4414912/24-28; заявл. 24.04.88; опубл. 23.07.91, Бюл. №27. - 5.
2. Патент на изобретение RU 2533743 С1 Способ возбуждения колебаний / Ю.С.Сергеев, С.В. Сергеев, Б.А. Решетников, Е.Н. Гордеев, Р.Г. Закиров, В.П. Гоголев, А.А. Микрюков, А.В. Иршин - заявл. 07.05.2013; опубл. 20.11.2014.
3. Патент на изобретение RU 2476275 С1 Способ возбуждения колебаний / С.В. Сергеев, С.Ю. Сергеев, Б.А. Решетников, Р.Г. Закиров. - заявл. 03.08.2011; опубл. 27.02.2013.
4. Сергеев, С.В. Вибрационные роторные приводы машин: монография / С.В. Сергеев, Б.А. Решетников, Р.Г. Закиров; М-во образования и науки Российской Федерации, Федеральное агентство по образованию, Южно-Уральский гос. ун-т. - Челябинск: Изд-во ЮУрГУ, 2007. - 240 с.
5. Kong X, Zhang X, Wen В, et al. Synchronization analysis and control of three eccentric rotors in a vibrating system usingadaptive sliding mode control algorithm. Mech Syst Signal Process 2016; 72-73: 432-50.
6. X. Zhang, С Li, Z. Wang, and S. Cui. Synchronous stability of four homodromy vibrators in a vibrating system with double resonant types. Shock Vib., vol. 2018, Dec. 2018, Art. no. 9641231.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ возбуждения колебаний | 2020 |
|
RU2739160C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2013 |
|
RU2533743C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2009 |
|
RU2410166C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2019 |
|
RU2716862C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2011 |
|
RU2476275C1 |
| СПОСОБ ПЕРЕМЕШИВАНИЯ ЖИДКОСТИ | 2013 |
|
RU2543204C2 |
| Способ активации процесса перемешивания жидких сред и устройство для его реализации | 2019 |
|
RU2720149C1 |
| Способ возбуждения круговых колебаний и устройство для его осуществления | 1988 |
|
SU1664412A1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347627C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕЗКИ СТЕКЛА | 2003 |
|
RU2248944C1 |
Использование: для применения в вибрационных станках для переработки отходов различных материалов во вторичное сырье, а также в вибрационных машинах, применяемых в строительстве, транспорте, медицине, металлообработке, сельском хозяйстве, пищевой, горной и других отраслях промышленности. Сущность изобретения заключается в том, что вращаемое тело сопрягают с тарированной силой прижима с контртелом и обкатывают его по последнему по незамкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, отличающийся тем, что одновременно на них воздействуют неуравновешенной радиальной силой и постоянно меняют ее направление с частотой вращения тела, в результате в системе механически генерируют колебания с модулируемыми свойствами, формирующие объемные вибрационные поля сложной формы. Технический результат: расширение технологических возможностей способа путем генерирования и управления сложной формой объемного вибрационного поля, формируемого колебаниями с модулируемыми свойствами. 12 ил.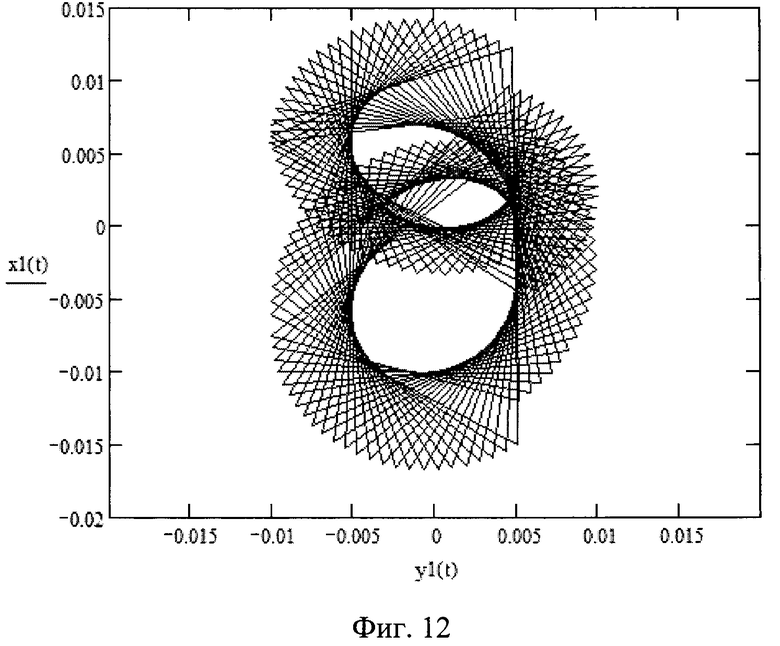
Способ возбуждения колебаний, заключающийся в том, что вращаемое тело сопрягают с тарированной силой прижима с контртелом и обкатывают его по последнему по незамкнутой траектории, имеющей поворотную симметрию вокруг оси симметрии траектории, причем частотой колебательных движений управляют по соотношению
а амплитудой А по формуле

где PОС - величина осевой тарированной силы прижима вращаемого тела к контртелу;
ωВР - частота вращения вращаемого тела;
m - масса вращаемого тела;
 - вылет вращаемого тела;
- вылет вращаемого тела;
j - жесткость стержня вращаемого тела;
D - диаметр вращаемого тела в зоне его сопряжения с контртелом,
отличающийся тем, что одновременно на вращаемое тело и контртело воздействуют неуравновешенной радиальной силой и постоянно меняют ее направление с частотой вращения вращаемого тела, в результате в системе механически генерируют колебания с модулируемыми свойствами, формирующие объемные вибрационные поля сложной формы.
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2011 |
|
RU2476275C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2013 |
|
RU2533743C1 |
| Способ возбуждения круговых колебаний и устройство для его осуществления | 1988 |
|
SU1664412A1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347627C1 |
| US 2002112948 A1, 22.08.2002 | |||
| Умножитель напряжения | 1989 |
|
SU1617489A1 |

