Предлагаемое изобретение относится к автоматизированному контролю и управлению горными машинами в условиях добывающих предприятий.
Известны системы визуализации работы экскаватора, содержащие источники информации, относящиеся к экскаватору, средства дистанционной передачи данных и мониторы (Патент РФ №2311511, МКИ E02F 3/48. - Опубл. 27.11.2007. Шоломицкий А.А., Дзеканюк А.О. Построение моделей виртуальной реальности по цифровым моделям открытых горных работ / Науков. працi ДонГТУ. - Вып.23. - Донецьк, ДонГТУ, 2001. - С.29-32).
При реализации известных систем обеспечивается визуальный контроль за работой экскаватора путем получения видеоизображений с помощью видеокамер, преобразования и передачи получаемой информации в пункт наблюдения для просмотра и архивирования. Недостатками известных систем являются, во-первых, невысокая надежность наблюдения, обусловленная сложными условиями работы видеоаппаратуры на экскаваторах, особенно в темное время суток, при наличии атмосферных осадков, пыли, грязи и др., во-вторых, большой объем передаваемой информации о видеоизображении.
Следовательно, недостатки известных систем визуализации работы экскаватора - невысокая надежность наблюдения, обусловленная сложными условиями работы видеоаппаратуры на экскаваторах, особенно в темное время суток, при наличии атмосферных осадков, пыли, грязи и др., и большой объем передаваемой информации о видеоизображении.
Из известных технических решений наиболее близким по достигаемому результату к предлагаемому является система визуализации работы экскаватора, содержащая источники информации, относящиеся к экскаватору, средства дистанционной передачи данных и мониторы (Трубецкой К.Н., Кулешов А.А., Клебанов А.Ф., Владимиров Д.Я. Современные системы управления горно-транспортными комплексами / Под ред. К.Н.Трубецкого. - СПб., Наука, 2007. - С.91-93).
В известной системе обеспечивается визуальный контроль за работой экскаватора путем получения видеоизображений с помощью видеокамер, преобразования и передачи получаемой информации в пункт наблюдения для просмотра и архивирования. В случае подключения к корпоративной компьютерной сети предприятия возможен просмотр изображений с любого компьютера сети, с которого разрешен доступ средствами сетевого администрирования. Недостатками известных систем являются, во-первых, невысокая надежность наблюдения, обусловленная сложными условиями работы видеоаппаратуры на экскаваторах, особенно в темное время суток, при наличии атмосферных осадков, пыли, грязи и др., во-вторых, большой объем передаваемой информации о видеоизображении.
Следовательно, недостатки известной системы визуализации работы экскаватора - невысокая надежность наблюдения, обусловленная сложными условиями работы видеоаппаратуры на экскаваторах, особенно в темное время суток, при наличии атмосферных осадков, пыли, грязи и др., и большой объем передаваемой информации о видеоизображении.
Цель предлагаемого изобретения - повышение надежности наблюдения и сокращение объема передаваемой информации.
Поставленная цель достигается тем, что в известной системе визуализации работы экскаватора, содержащей источники информации, относящиеся к экскаватору, средства дистанционной передачи данных и мониторы, дополнительно введено средство обработки информации, выполняющее построение трехмерного синтезированного изображения на основе сигналов от источников информации, а в качестве источников информации используют сигналы управления приводами главного движения, напряжения и токи двигателей указанных приводов.
По сравнению с наиболее близким аналогичным решением предлагаемое техническое решение имеет следующие новые признаки:
- дополнительно введено средство обработки информации, выполняющее построение трехмерного синтезированного изображения на основе сигналов от источников информации;
- в качестве источников информации используют сигналы управления приводами главного движения, напряжения и токи двигателей указанных приводов.
Следовательно, заявляемое техническое решение соответствует требованию «новизна».
При реализации предлагаемого изобретения повышается надежность наблюдения и сокращается объем передаваемой информации. Это обеспечивается использованием для визуализации работы экскаватора в качестве источников информации сигналов задания для приводов главного движения, напряжений и токов двигателей указанных приводов. Указанная информация в цифровой форме имеется в системе управления экскаватором и с помощью средств передачи данных передается в пункт наблюдения, где с помощью средств компьютерной графики синтезируется положение основных механизмов экскаватора. При этом надежность наблюдения не зависит от времени суток, погодных условий, загрязнения датчиков видеонаблюдения и др. Объем передаваемых данных при этом значительно меньше, чем при передаче видеоизображений.
Следовательно, заявляемое техническое решение соответствует требованию «положительный эффект».
По каждому отличительному признаку проведен поиск известных технических решений в области видеонаблюдения, электротехники, электропривода и горных машин.
Средства обработки информации, выполняющие построение трехмерного синтезированного изображения на основе сигналов от источников информации, используются для построения изображений, например, в системах наблюдения летательных аппаратов (Патент РФ №2328764, МПК G05D 1/10, 2008). В известной системе изображение синтезируется на основе данных, получаемых от приборов непосредственного наблюдения и измерения. В предлагаемом техническом решении изображение синтезируется на основе информации о работе главных приводов экскаватора, содержащейся в рабочих сигналах приводов.
Признак:
- в качестве источников информации используют сигналы управления приводами главного движения, напряжения и токи двигателей указанных приводов, в известных технических решениях аналогичного назначения не обнаружены.
Таким образом, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию «существенные отличия».
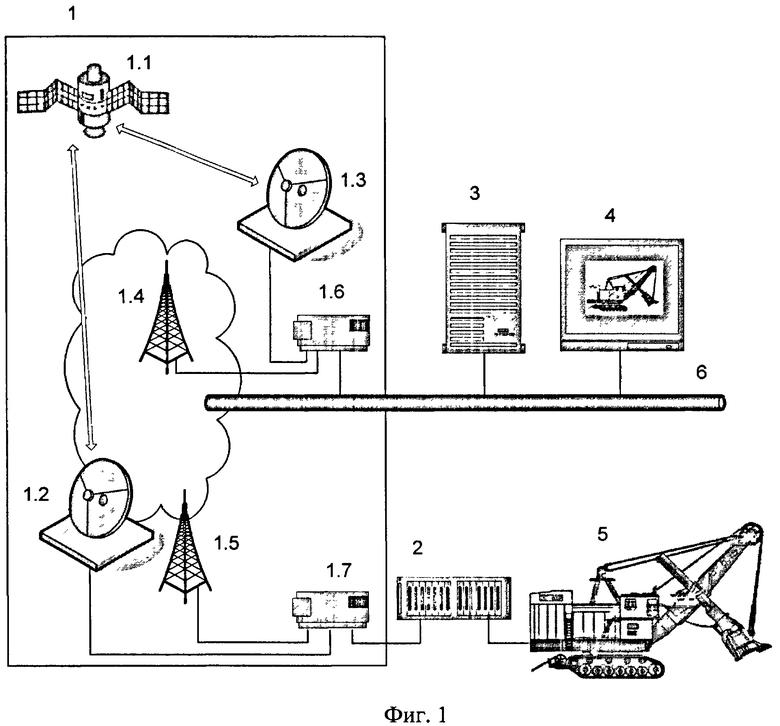
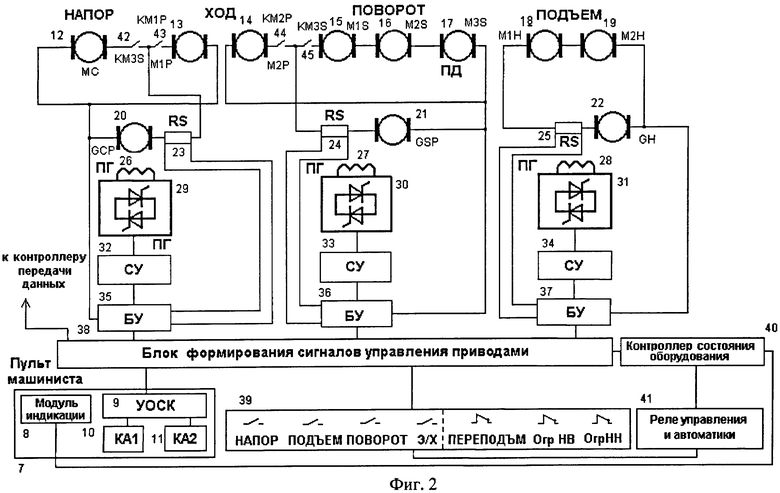
Сущность предлагаемого изобретения поясняется чертежами. На фиг.1 показана функциональная схема системы видеонаблюдения работы экскаватора. На чертеже обозначено: 1 - средства передачи данных, 1.1 - геостационарный спутник; 1.2 и 1.3 - спутниковые антенны; 1.4 и 1.5 - антенны радиосвязи; 1.6 и 1.7 - модемы; 2 - контроллер передачи данных; 3 - средство обработки информации (сервер); 4 - монитор; 5 - экскаватор; 6 - шина. На фиг.2 в качестве примера показана упрощенная типовая функциональная схема экскаватора, поясняющая способ управления электроприводами главного движения экскаватора. Функциональные схемы других отечественных экскаваторов аналогичны и отличаются только составом и параметрами применяемого электрооборудования. На фиг.2 обозначено: 7 - пульт машиниста; 8 - модуль индикации на пульте машиниста; 9 - устройство обработки сигналов командоаппаратов; 10 и 11 - командоаппараты; 12-19 - двигатели постоянного тока; 20-21 - генераторы; 23-25 - токоизмерительные шунты; 26-28 - обмотки возбуждения генераторов; 29-31 - тиристорные преобразователи управления возбуждением генераторов; 32-34 - системы управления тиристорными преобразователями соответственно 29, 30 и 31; 35-37 - блоки управления возбуждением генераторов; 38 - блок формирования сигналов управления приводами; 39 - блок реле технологических защит; 40 - контроллер состояния оборудования; 41 - блок реле управления и автоматики; 42-45 - контакторы.
Три электропривода главного движения экскаватора (напора, подъема и поворота) выполнены по системе генератор-двигатель. Двигатели постоянного тока независимого возбуждения (или группа двигателей) 12-19 управляются напряжениями с выходов генераторов постоянного тока 20-22. Выходные напряжения генераторов 20-22 регулируются путем изменения токов возбуждения с помощью трехфазных реверсивных тиристорных управляемых выпрямителей ПГ 29-31. Управление тиристорными преобразователями осуществляется с помощью микроконтроллерных систем управления СУ 32-34, выполняющих функцию формирователей импульсов управления тиристорами. Блоки управления БУ 35-37 осуществляют формирование сигналов управления для тиристорных преобразователей 29-31 в функции сигналов задания и обратных связей по току и напряжению генераторов 20-22.
В режиме «ход» якорные обмотки двигателей хода М1Р 13, М2Р 14 получают питание от генераторов соответственно напора и поворота.
Задание скорости движения приводов осуществляется машинистом с помощью командоаппаратов КА1 и КА2. Устройство обработки сигналов командоаппаратов (УОСК) 9 предназначено для преобразования выходных сигналов командоаппаратов в систему цифровых сигналов управления приводами главного движения. Блок формирования сигналов управления приводами 38 формирует сигналы задания для приводов главного движения в функции выходных сигналов УОСК 9 и состояния цепей защиты и блокировок.
Контроллер состояния оборудования 40 производит сбор информации о состоянии реле управления и автоматики экскаватора и формирует сигналы управления для контакторов возбуждения генераторов и сигнал в виде последовательного кода для модуля индикации 8. Модуль индикации 8 размещен в кабине машиниста и предназначен для отображения с помощью светодиодов информации о включенном состоянии электрооборудования.
Устройство обработки сигналов командоаппаратов УОСК 9 выполняет следующие функции:
- аналого-цифровое преобразование выходных сигналов командоаппаратов;
- формирование последовательного кода управления приводами на выходе;
- формирование дискретных сигналов управления включением приводов (напор, поворот, подъем).
Сигнал управления приводами передается с выхода устройства 3 в специальном формате со скоростью 9,6 кБод на вход блока формирования сигналов управления приводами 38, на входах которого также действуют:
- логические сигналы включения приводов подъема, напора, поворота, хода;
- логический сигнал «Переподъем»;
- логические сигналы ограничения напора вверх и вниз.
Блок формирования сигналов управления приводами 38 формирует на трех выходах сигналы задания в виде последовательных цифровых кодов для управления приводами напора, поворота и подъема в зависимости от цифрового сигнала, сформированного устройством обработки сигналов командоаппаратов, и сигналов аппаратуры управления и защиты. Цифровые сигналы управления приводами формируются в виде последовательных кодов, содержащих информацию об идентификационном номере привода и величине сигнала задания. Информация о сигналах управления приводами, напряжениях и токах приводов, а также логические сигналы управления включением приводов, поступает с выхода блока формирования сигналов управления приводами 38 на вход контроллера передачи данных 2 (фиг.1), который обеспечивает передачу данных к модему 1.7 (фиг.1). Модем 1.7 обеспечивает преобразование информации в сигналы для передачи по радиоканалу (антенна радиосвязи 1.5) и(или) системы спутниковой вязи (спутниковая антенна 1.2). Сигналы от антенны радиосвязи 1.4 и(или) спутниковой антенны 1.3. поступают в модем 1.6 и далее по шине 6 на сервер 3, который выполняет функцию средства обработки информации. Указанное средство обработки информации в зависимости от сигналов, поступающих от экскаватора: сигналов задания на выходах командоаппаратов, напряжений и токов двигателей подъема, напора и поворота, вычисляет текущее положение стрелы и ковша экскаватора и строит синтетическое трехмерное изображение для визуализации работы экскаватора на дисплее 5.
Движение рабочих органов экскаватора однозначно определяется сигналами управления, поступающими от командоаппаратов. По напряжению на якорной обмотке двигателя и току якорной обмотки вычисляется скорость соответствующего привода. Моделирование работы экскаватора по сигналам управления и выходным переменным приводов позволяет визуализировать работу машины, контролировать процесс экскавации, учитывать количество отгруженной горной массы, фиксировать простои экскаватора.
Таким образом, предлагаемая система визуализации работы экскаватора позволяет повысить надежность наблюдения в сложных условиях работы экскаваторов, особенно в темное время суток, при наличии атмосферных осадков, пыли, грязи и др., и уменьшить объем передаваемой информации за счет использования для визуализации работы экскаватора сигналов задания для приводов главного движения, напряжений и токов двигателей указанных приводов.
Другим важным достоинством предлагаемого способа является упрощение системы, так как указанная информация в цифровой форме имеется в системе управления экскаватором и с помощью средств передачи данных передается в пункт наблюдения, где с помощью средств компьютерной графики синтезируется положение основных механизмов экскаватора.
Предлагаемая система визуализации работы экскаватора реализована и успешно испытана на отечественных экскаваторах ЭКГ-10 и ЭКГ-12.
Следовательно, в системе визуализации работы экскаватора, содержащей источники информации, относящиеся к экскаватору, средства дистанционной передачи данных и монитор, дополнительно используется средство обработки информации, выполняющее построение трехмерного синтезированного изображения на основе сигналов от источников информации, а в качестве источников информации используются сигналы управления приводами главного движения, напряжений и токов двигателей указанных приводов.
Использование предлагаемого технического решения на экскаваторах позволит повысить производительность работ в горной промышленности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ГЛАВНОГО ДВИЖЕНИЯ ЭКСКАВАТОРА | 2005 |
|
RU2288997C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРООБОРУДОВАНИЕМ ПРИ ПЕРЕГОНЕ ЭКСКАВАТОРА | 2018 |
|
RU2670964C9 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ПРИВОДНОГО ДВИГАТЕЛЯ МНОГОМАШИННОГО АГРЕГАТА ЭКСКАВАТОРА | 2010 |
|
RU2433521C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ РАБОТЫ ЭКСТРУДЕРА | 2010 |
|
RU2440243C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ ГЛАВНЫХ ПРИВОДОВ ЭКСКАВАТОРА | 2010 |
|
RU2433520C1 |
| ЭЛЕКТРИЧЕСКАЯ ДИЗЕЛЬ-ГЕНЕРАТОРНАЯ СТАНЦИЯ ДЛЯ ПЕРЕГОНА ГОРНЫХ МАШИН | 2022 |
|
RU2790609C1 |
| СПОСОБ УПРАВЛЕНИЯ ОТКРЫВАНИЕМ ДНИЩА КОВША ЭКСКАВАТОРА | 2023 |
|
RU2816132C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ОТКРЫВАНИЯ ДНИЩА КОВША ЭКСКАВАТОРА | 2019 |
|
RU2701674C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ ЭЛЕКТРООБОРУДОВАНИЯ ЭКСКАВАТОРА С ИСПОЛЬЗОВАНИЕМ РЕКУПЕРИРОВАННОЙ ЭНЕРГИИ | 2023 |
|
RU2819222C1 |
| СПОСОБ РАБОТЫ ПРИВОДА ОТКРЫВАНИЯ ДНИЩА КОВША ЭКСКАВАТОРА | 2020 |
|
RU2734181C1 |
Изобретение относится к автоматизированному контролю и управлению горными машинами в условиях добывающих предприятий. Технический результат - повышение надежности наблюдения и сокращение объема передаваемой информации. Система визуализации работы экскаватора включает источники информации, относящиеся к экскаватору, средства дистанционной передачи данный, монитор и средство обработки информации. Средство обработки информации выполняет построение трехмерного синтезированного изображения на основе сигналов от источников информации. В качестве источников информации используют сигналы управления приводами главного движения, напряжения и токи двигателей указанных приводов. 2 ил.
Система визуализации работы экскаватора, содержащая источники информации, относящиеся к экскаватору, средства дистанционной передачи данных и монитор, отличающаяся тем, что дополнительно введено средство обработки информации, выполняющее построение трехмерного синтезированного изображения на основе сигналов от источников информации, а в качестве источников информации используют сигналы управления приводами главного движения, напряжения и токи двигателей указанных приводов.
| ТРУБЕЦКОЙ К.Н | |||
| и др | |||
| Современные системы управления горно-транспортными комплексами | |||
| - С.-Пб.: Наука, 2007, ст.91-93 | |||
| Устройство для вычисления координат отображаемых объектов | 1987 |
|
SU1444875A1 |
| Способ считывания, передачи и воспроизведения трехмерного изображения и устройство для его осуществления | 1986 |
|
SU1531059A1 |
| Способ автоматического контроля шахтных устройств визуализации и стенд для его осуществления | 1988 |
|
SU1559140A1 |
| СПОСОБ ДИНАМИЧЕСКОЙ ВИЗУАЛИЗАЦИИ ДАННЫХ ОБ ОБЪЕКТЕ | 1998 |
|
RU2142162C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ГЛАВНОГО ДВИЖЕНИЯ ЭКСКАВАТОРА | 2005 |
|
RU2288997C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МОНИТОРИНГА РЕЖИМА НАГРУЗКИ ДРАГЛАЙНА ИЛИ ЭЛЕКТРИЧЕСКОГО ОДНОКОВШОВОГО ЭКСКАВАТОРА | 2005 |
|
RU2311511C2 |
| СИСТЕМА ДИСПЛЕЯ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2328764C1 |

