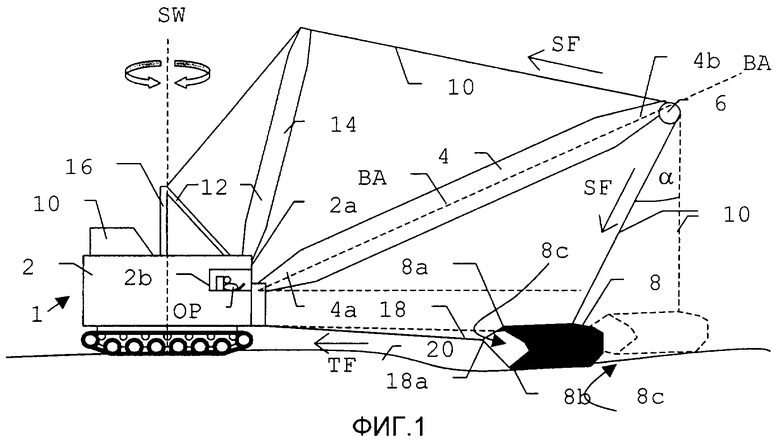
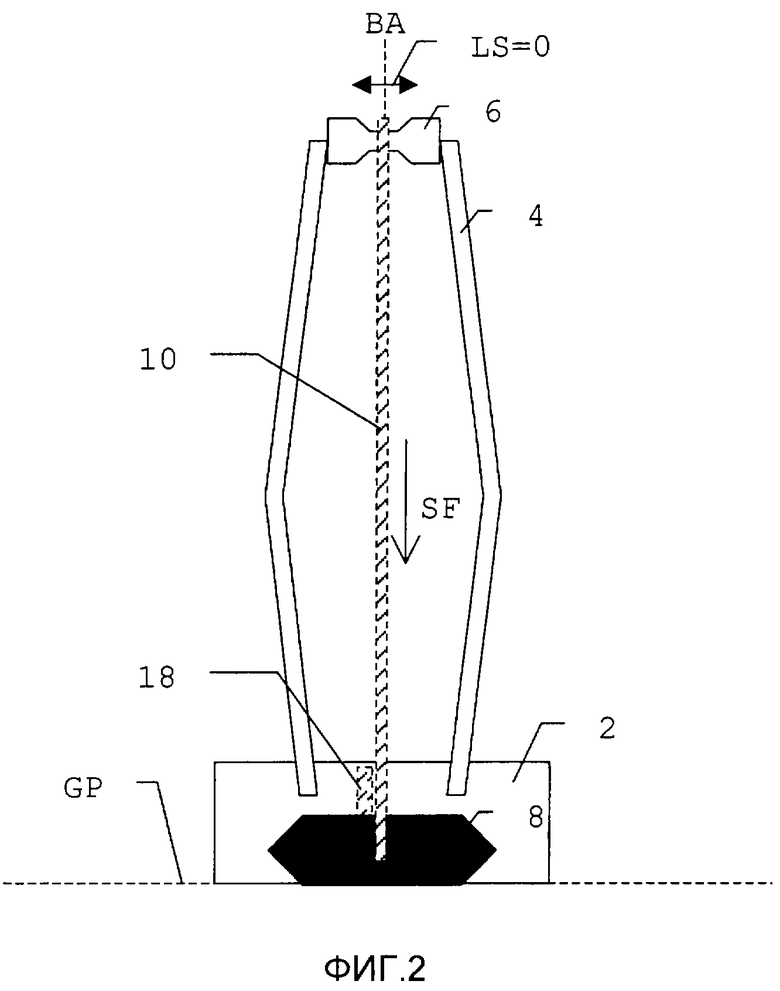
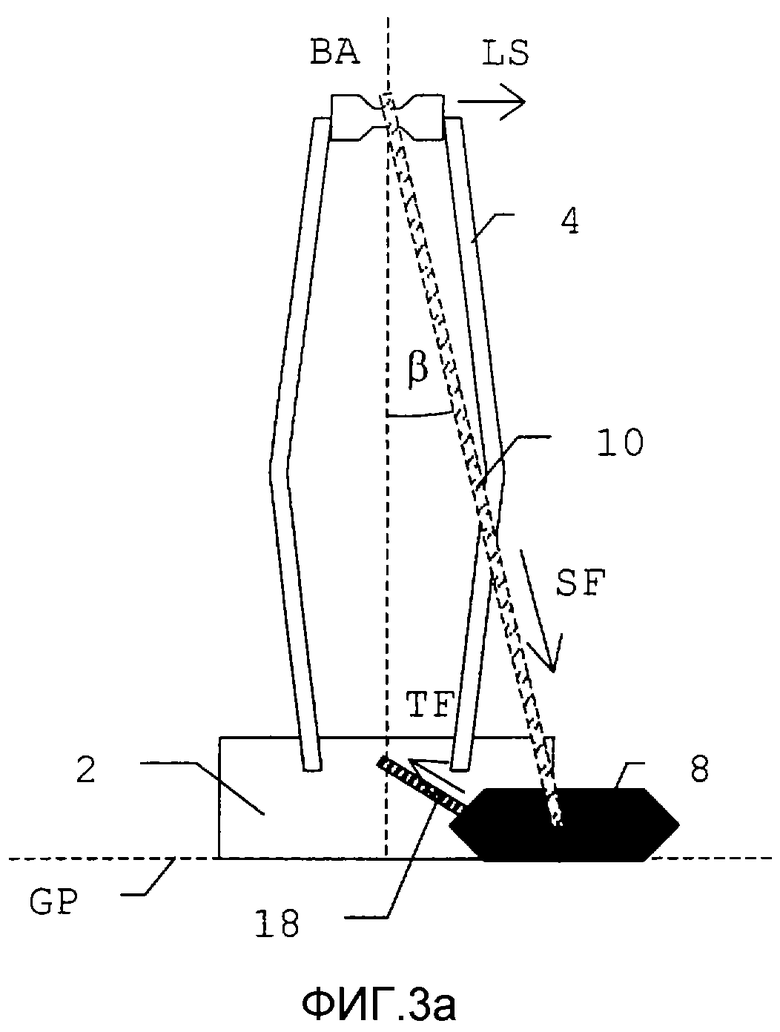
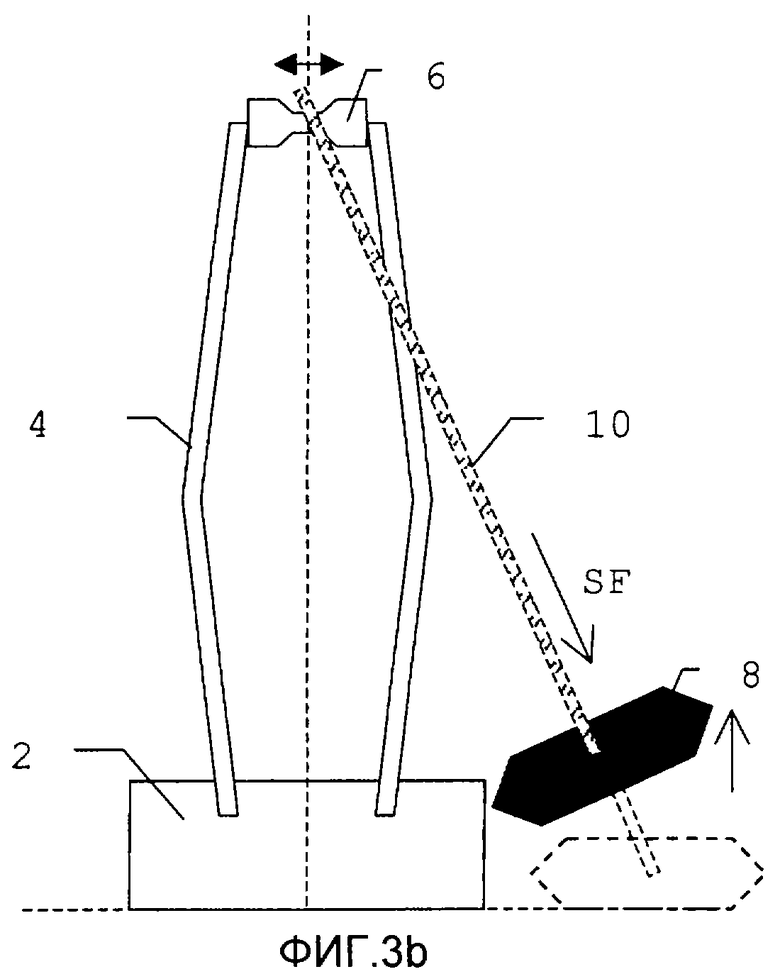
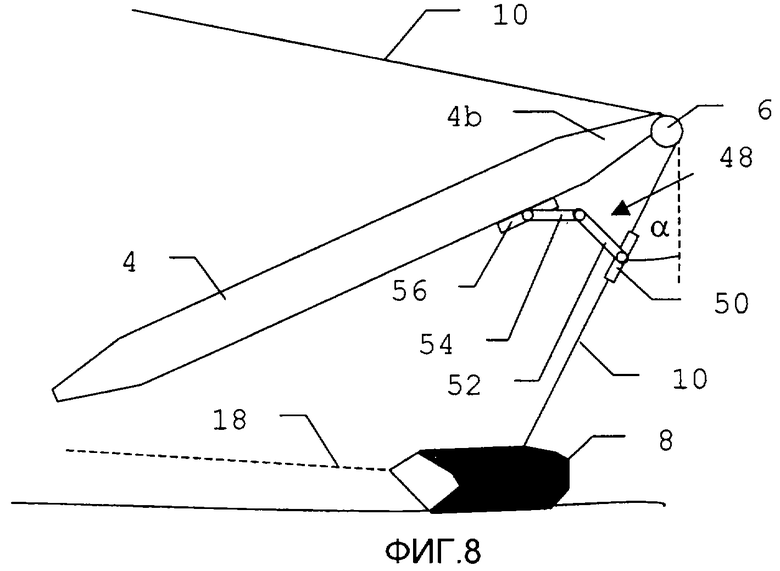
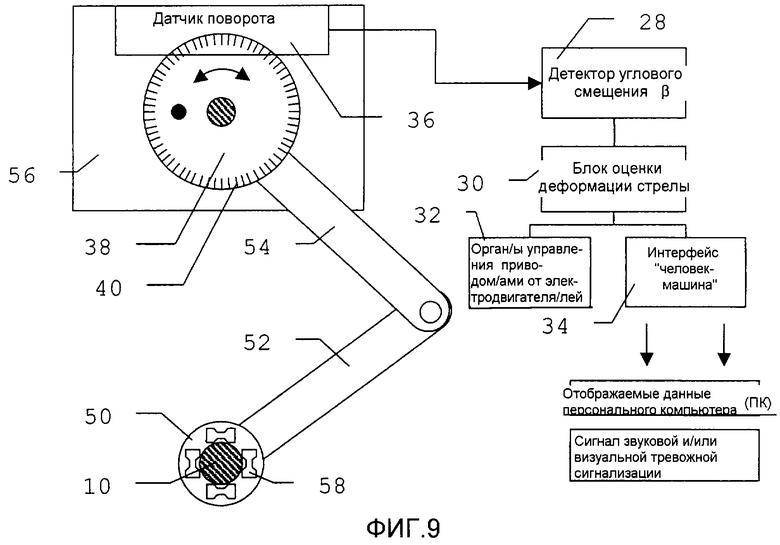
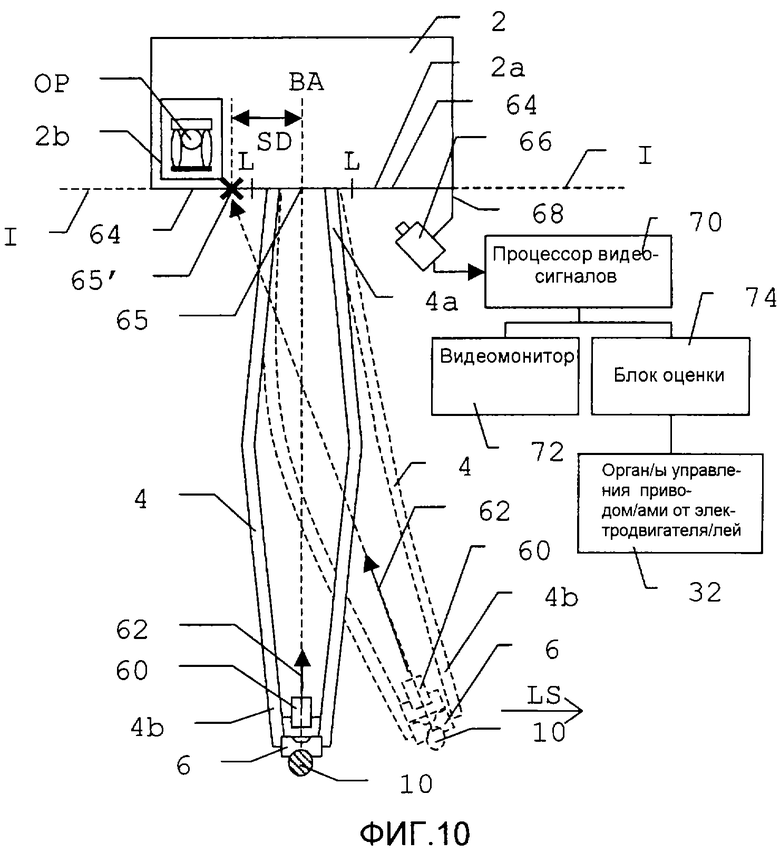
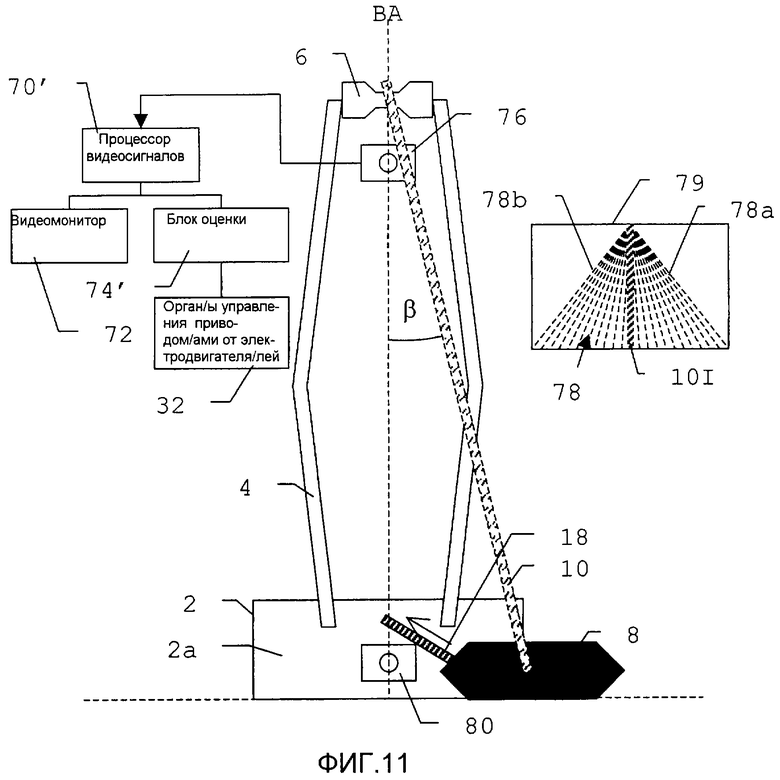
1. Способ мониторинга режима нагрузки драглайна (1) или электрического одноковшового экскаватора, содержащего стрелу (4), ковш (8), подъемный канат (10), на котором ковш свисает со стрелы, и тяговый канат (18) для волочения ковша, при этом стрела проходит, по существу, вдоль оси (ВА) стрелы в обычном ненапряженном состоянии, отличающийся тем, что используют технические средства (26, 28; 42; 46; 48; 60-70; 76; 80; 82; GPS1-GPS3; 96, 98) для формирования данных ориентации, характеризующих боковую ориентацию относительно плоскости, содержащей ось (ВА) стрелы, для, по меньшей мере, одного элемента, выбранного из группы следующих элементов: подъемного каната (10), тягового каната (18), стрелы (4), ковша (8), определяют боковую ориентацию, по меньшей мере, одного элемента, осуществляют управление (32; 34, 72, ОР) упомянутым режимом нагрузки драглайна (1) или электрического экскаватора на основе данных боковой ориентации, по меньшей мере, одного элемента.2. Способ по п.1, отличающийся тем, что данные ориентации вводят в интерфейс (34, 72) «человек-машина», например дисплейное устройство (72), при этом этап управления осуществляет оператор.3. Способ по любому из п.1 или 2, отличающийся тем, что данные ориентации вводят в автоматизированное средство (32) управления и управляют, по меньшей мере, одним из элементов, выбранных из группы, состоящей из привода (106) подъемного каната (10), привода (108) тягового каната (18), привода (110) стрелы (4) для поворота стрелы.4. Способ по любому из п.1 или 2, отличающийся тем, что управление осуществляют, по существу, в реальном масштабе времени с использованием сигнала обратной связи по данным ориентации.5. Способ по любому из п.1 или 2, отличающийся тем, что управленце осуществляют в совместном режиме человек-оператор с помощью интерфейса (34, 72) «человек-машина» и автоматизированного средства управления (32).6. Способ по любому из п.1 или 2, отличающийся тем, что осуществляют санкционированное управление перегрузкой драглайна (1) иди электрического одноковшового экскаватора в случае максимального напряжения в его конструкции в зависимости от данных ориентации.7. Способ по любому из п.1 или 2, отличающийся тем, что определяют стреле (4) заданный максимальный предел нагрузки, при этом санкционированное управление перегрузкой стрелы с заданного предела нагрузки в зависимости от данных ориентации.8. Способ по любому из п.1 или 2, отличающийся тем, что посредством технических средств формируют данные ориентации в виде количественных данных, характеризующих величину разориентации, по меньшей мере, в одном элементе (4, 10, 18, 8) драглайна.9. Способ по любому из п.1 или 2, отличающийся тем, что данные ориентации получают путем измерения на шкиве (6), по которому проходит подъемный канат (10), свисая с дистального конца (4b) стрелы (4).10. Способ по п.9, отличающийся тем, что шкив (6) выполнен с возможностью качания в ответ на приложение поперечного напряжения со стороны подъемного каната (10), при этом данные ориентации получают путем определения (100а, 26b, 28; 38-36, 42, 28) величины качания шкива.11. Способ по п.10, отличающийся тем, что данные ориентации получают путем измерения (46) поперечного напряжения, прикладываемого на шкиве (6).12. Способ по любому из п.1 или 2, отличающийся тем, что данные ориентации получают посредством физического контакта (46, 48), по меньшей мере, с одним из элементов (4, 8, 10, 18) драглайна.13. Способ по п.12, отличающийся тем, что предусматривают физическое сцепление (50) подъемного каната (10) с устройством (56-36) на основе датчика углового или линейного перемещения.14. Способ по любому из п.1 или 2, отличающийся тем, что данные ориентации получают путем обнаружения поперечного отклонения стрелы (4) от оси (ВА) стрелы.15. Способ по п.14, отличающийся тем, что поперечное отклонение обнаруживают путем направления оптического луча (62) из источника (60), прикрепленного к стреле (4), предпочтительно на дистальном конце (4b) или около него, и детектирования перемещения (SD) пятна (65′) луча в том месте, где он попадает в мишень (64).16. Способ по любому из п.1 или 2, отличающийся тем, что данные ориентации получают путем формирования (42; 48; 50) изображения, по меньшей мере, одного элемента (4, 8, 10, 18) драглайна.17. Способ по п.16, отличающийся тем, что формируют изображение подъемного каната (10) с помощью средств (76, 80; 82) камеры.18. Способ по любому из п.1 или 2, отличающийся тем, что данные ориентации получают путем анализа координатных данных, получаемых со средств (GPS1-GPS3) приемников Глобальной системы позиционирования (GPS), при этом по меньшей мере один приемник (GPS3) располагают на стреле (4).19. Способ по любому из п.1 или 2, отличающийся тем, что данные ориентации получают геодезическими методами (96, 98) для определения изменения координат части стрелы (4), подверженной поперечном отклонениям относительно оси (ВА) стрелы.20. Способ по п.19, отличающийся тем, что осуществляют геодезическою съемку мишени (98), по существу, на дистальном конце (4b) стрелы с помощью геодезического устройства, предпочтительно суммирующей станции (96) автономного сопровождения, которую размещают в известной точке отсчета на драглайне.21. Устройство для мониторинга режима нагрузки драглайна (1) или электрического одноковшового экскаватора, причем драглайн содержит стрелу (4), ковш (8), подъемный канат (10), на котором ковш свисает со стрелы, и тяговый канат (18) для волочения ковша, при этом стрела проходит, по существу, вдоль оси (ВА) стрелы в своем обычном ненапряженном состоянии, отличающееся тем, что содержит средства (26, 28; 42; 46; 48; 60-70; 76, 80; 82; GPS1-GPS3; 96, 98) для формирования данных ориентации, характеризующих боковую ориентацию относительно плоскости, содержащей ось (ВА) стрелы, по меньшей мере, одного из следующих элементов, выбранных из группы, состоящей из подъемного каната (10), тягового каната (18), стрелы (4), ковша (8), средства (32; 34; 72, ОР) управления, предназначенные для управления режимом нагрузки драглайна (1) или электрического экскаватора на основе данных боковой ориентации, по меньшей мере, одного элемента.22. Устройство по п.21, отличающееся тем, что содержит интерфейс (34, 72) «человек-машина», например дисплейное устройство (72), предназначенное для приема данных ориентации.23. Устройство по любому из п.21 или 22, отличающееся тем, что содержит автоматизированное средство (32) управления, предназначенное для управления, по меньшей мере, одним из элементов из группы, состоящей из привода (106) подъемного каната (10), привода (108) тягового каната (18), привода (110) стрелы (4) для поворота стрелы, в ответ на данные ориентации.24. Устройство по любому из п.21 или 22, отличающееся тем, что средства (32; 34, 72, OP) управления выполнены с возможностью работы, по существу, в реальном масштабе времени с использованием обратной связи по данным ориентации.25. Устройство по любому из п.21 или 22, отличающееся тем, что содержит средство для санкционированного управления перегрузкой драглайна (1) или электрического одноковшового экскаватора, особенно в случае, когда максимальные напряжения в его конструкции являются функцией данных ориентации.26. Устройство по любому из п.21 или 22, отличающееся тем, что стрела (4) имеет заданный максимальный предел нагрузки, и при этом управляющие средства (32; 34, 72, ОР) содержат средство для санкционированного управления перегрузкой стрелы с превышением заданного предела нагрузки в зависимости от данных ориентации.27. Устройство по любому из п.21 или 22, отличающееся тем, что упомянутые средства (26, 28; 42; 46; 48; 60-70, 80; 92; GPS1-GPS3; 96, 98) для формирования данных ориентации содержат средства для формирования количественных данных, характеризующих величину разориентации, по меньшей мере, в одном элементе (4, 10, 18, 8) драглайна.28. Устройство по любому из п.21 или 22, отличающееся тем, что средства для формирования данных ориентации содержат средства (26) измерения на шкиве (6), по которому проходит подъемный канат (10), свисая с дистального конца (4b) стрелы (4).29. Устройство по п.28, отличающееся тем, что шкив (6) выполнен с возможностью качания в ответ на приложение поперечного напряжения со стороны подъемного каната (10), при этом средства для формирования данных ориентации содержат средства (100а, 26b, 28; 38-36, 42, 28) для определения величины качания шкива.30. Устройство по п.29, отличающееся тем, что средства для формирований данных ориентации содержат средство (46) для измерения поперечного напряжения, прикладываемого к шкиву (6).31. Устройство по любому из п.21 или 22, отличающееся тем, что средства для формирования данных ориентации содержат средства (46, 48) физического контакта, по меньшей мере, с одним элементом (4, 8, 10, 18) драглайна.32. Устройство по п.31, отличающееся тем, что содержит средство (50), обеспечивающее физическое сцепление подъемного каната (10) с устройством (56-36) на основе датчика углового или линейного перемещения.33. Устройство по любому из п.21 или 22, отличающееся тем, что средства для формирования данных ориентации содержат средства для обнаружения поперечного отклонения стрелы (4) от оси (ВА) стрелы.34. Устройство по п.32, отличающееся тем, что содержит источник (60) для генерирования оптического луча (62), прикрепленный к стреле (4), предпочтительно на дистальном конце (4b) или около него, и средства (66-70) для обнаружения перемещения (SD) пятна (65′) луча в том месте, где он попадает на мишень (64).35. Устройство по любому из п.21 или 22, отличающееся тем, что средства для формирования данных ориентации содержат средства (42; 48; 50) для формирования изображения по меньшей мере одного элемента (4, 8, 10, l8) драглайна.36. Устройство по п.35, отличающееся тем, что содержит средства (76; 80, 82) камер для формирования изображения подъемного каната (10).37. Устройство по любому из п.21 или 22, отличающееся тем, что средства для формирования данных ориентации содержат средства (GPS1-GPS3) приемников Глобальной системы позиционирования (GPS), при этом, по меньшей мере, один приемник (GPS3) расположен на стреле (4).38. Устройство по любому из п.21 или 22, отличающееся тем, что средства для формирования данных ориентации содержат геодезические средства (96, 98) для определения изменений координат части стрелы (4), подверженной поперечным отклонениям относительно оси (ВА) стрелы.39. Устройство по п.38, отличающееся тем, что содержит мишень (98), по существу, на дистальном конце (4b) стрелы и геодезическое устройство, предпочтительно суммирующую станцию (96) автономного сопровождения, размещенную в известной точке отсчета на драглайне и направленную на мишень.