Предлагаемое изобретение относится к электрооборудованию горных машин и предназначено для использования в низковольтных комплектных устройствах карьерных экскаваторов.
Известны способы автоматического регулирования возбуждения синхронного приводного двигателя многомашинного агрегата экскаватора, при котором устанавливают ток возбуждения в соответствии с сигналом задания, который формируют в виде суммы опорного постоянного сигнала, и корректирующего сигнала, формируемого в виде постоянного напряжения при уменьшении действующего значения питающего напряжения ниже допустимого уровня (Патент РФ №2122277, МПК Н02Р 7/16, 20.11.98; Абрамович Б.Н., Круглый А.А. Возбуждение, регулирование и устойчивость синхронных двигателей. - Л., Энергоатомиздат, 1983, С.104-107; Павленко С.В. Эффективность работы приводных синхронных электродвигателей на карьерных экскаваторах ОАО «Лебединский ГОК» // Горное оборудование и электромеханика, 2007, №7, с.7-12).
При реализации известных способов обеспечивается регулирование возбуждения приводного синхронного двигателя с коррекцией по напряжению питающей сети. В условиях карьера резкие изменения нагрузки синхронного двигателя вызывают, во-первых, качания ротора, во-вторых, колебания напряжения и активной мощности в сети.
Следовательно, недостатком известных способов автоматического регулирования возбуждения синхронного приводного двигателя многомашинного агрегата экскаватора является низкая динамическая устойчивость синхронного двигателя.
Из известных технических решений наиболее близким по достигаемому результату к предлагаемому является способ автоматического регулирования возбуждения синхронного приводного двигателя многомашинного агрегата экскаватора, при котором устанавливают ток возбуждения в соответствии с сигналом задания, который формируют в виде суммы опорного постоянного сигнала, первого корректирующего сигнала, формируемого в виде постоянного напряжения при уменьшении действующего значения питающего напряжения ниже допустимого уровня, и второго корректирующего сигнала, формируемого в виде постоянного напряжения при положении командоаппарата подъема, превышающем заданное пороговое значение (Павленко С.В. Исследование режимов работы сетевых синхронных электродвигателей с автоматическим регулированием возбуждения на карьерных экскаваторах ОАО «Лебединский ГОК» // Электротехника, 2010, №3, с.25-32).
При реализации известного способа обеспечивается регулирование возбуждения приводного синхронного двигателя с коррекцией по напряжению питающей сети и нагрузки, обусловленной работой привода подъема. При работе экскаватора возможны режимы одновременной работы привода подъема и привода поворота или напора. При этом в условиях карьера резкие изменения нагрузки синхронного двигателя вызывают, во-первых, качания ротора, во-вторых, колебания напряжения и активной мощности в сети.
Следовательно, недостатком известных способов автоматического регулирования возбуждения синхронного приводного двигателя многомашинного агрегата экскаватора является низкая динамическая устойчивость синхронного двигателя.
Цель предлагаемого изобретения - повышение динамической устойчивости синхронного приводного двигателя многомашинного агрегата экскаватора в различных режимах работы.
Поставленная цель достигается тем, что в известном способе автоматического регулирования возбуждения синхронного приводного двигателя многомашинного агрегата экскаватора, при котором устанавливают ток возбуждения в соответствии с сигналом задания, который формируют в виде суммы опорного постоянного сигнала, первого корректирующего сигнала, формируемого в виде постоянного напряжения при уменьшении действующего значения питающего напряжения ниже допустимого уровня, и второго корректирующего сигнала, формируемого в виде постоянного напряжения при положении командоаппарата подъема, превышающем заданное пороговое значение, дополнительно измеряют полную электрическую мощность приводов главного движения, суммируют полученное значение с опорным сигналом и первым корректирующим сигналом, сравнивают две вычисленные суммы и формируют сигнал задания тока возбуждения равным максимальной из двух сумм.
По сравнению с наиболее близким аналогичным решением предлагаемое техническое решение имеет следующие новые признаки (операции):
- дополнительно измеряют полную мощность приводов главного движения;
- суммируют полученное значение полной электрической мощности с опорным сигналом и первым корректирующим сигналом;
- сравнивают две вычисленные суммы;
- формируют сигнал задания тока возбуждения равным максимальной из двух сумм.
Следовательно, заявляемое техническое решение соответствует требованию «новизна».
При реализации предлагаемого изобретения повышается динамическая устойчивость синхронного двигателя во всех режимах работы экскаватора. Это обеспечивается коррекцией возбуждения синхронного двигателя по нагрузке, которая, во-первых, определяется прогнозным способом в зависимости от положения командоаппарата подъема и, во-вторых, вычисляется путем суммирования полной электрической мощности приводов главного движения. Максимальное из двух вычисленных значений используется для коррекции тока возбуждения.
Следовательно, заявляемое техническое решение соответствует требованию «положительный эффект».
По каждому отличительному признаку проведен поиск известных технических решений в области электротехники, электропривода и горных машин.
Операции:
- дополнительно измеряют полную электрическую мощность приводов главного движения;
- суммируют полученное значение полной электрической мощности с опорным сигналом;
- сравнивают две вычисленные суммы;
- формируют сигнал задания тока возбуждения равным максимальной из двух сумм, в известных способах аналогичного назначения не обнаружены.
Таким образом, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию «существенные отличия».
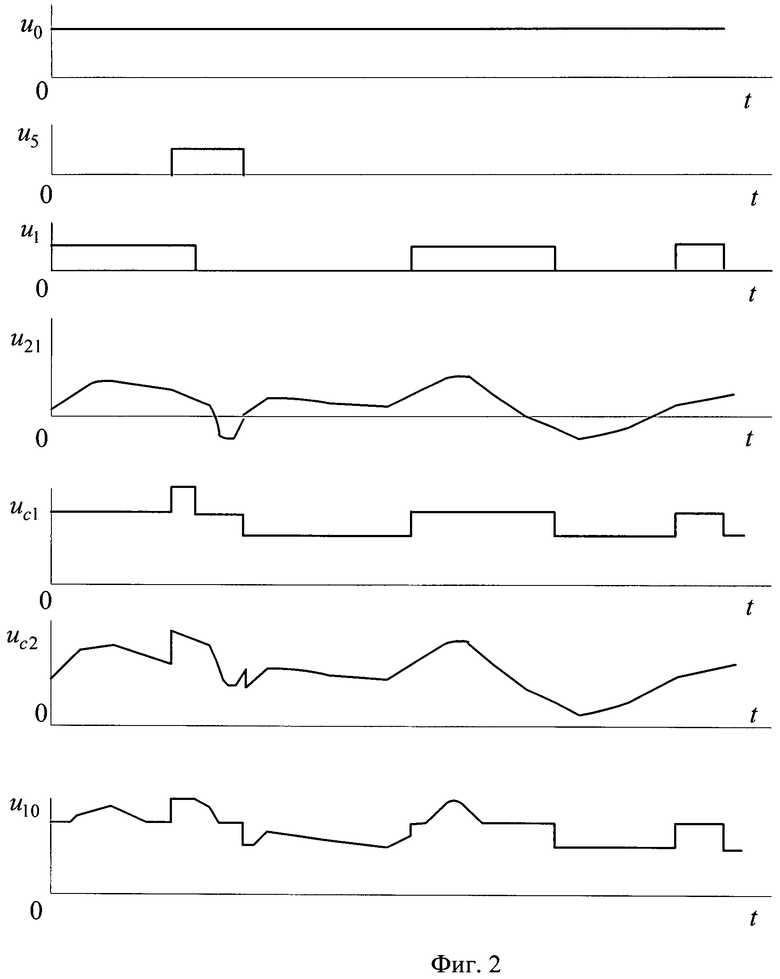
Сущность предлагаемого изобретения поясняется чертежами. На фиг.1 показана упрощенная типовая функциональная схема экскаватора ЭКГ-8, поясняющая способ автоматического регулирования возбуждения синхронного приводного двигателя многомашинного агрегата экскаватора. Функциональные схемы других отечественных экскаваторов аналогичны и отличаются только составом и параметрами применяемого электрооборудования. На фиг.2 приведены временные диаграммы, поясняющие работу системы автоматического регулирования возбуждения синхронного двигателя.
На чертеже обозначено: 1 - командоаппарат машиниста; 2 - ячейка высоковольтного ввода, содержащая разъединитель 3 и вакуумный выключатель 4; 5 - датчик напряжения питающей сети; 6 - приводной синхронный двигатель; 7 - тиристорный преобразователь; 8 - шунт; 9 - регулятор тока возбуждения; 10 - контроллер; 11, 12 и 13 - генераторы приводов соответственно подъема, напора и поворота; 14, 15 и 16 и 17 - двигатели постоянного тока приводов соответственно подъема, напора и поворота; 18, 19 и 20 - шунты (датчики тока двигателей); 21 - блок вычисления электрической мощности; 22 - задатчик тока возбуждения синхронного двигателя.
Три электропривода главного движения экскаватора (напора, подъема и поворота) выполнены по системе генератор-двигатель. Двигатели постоянного тока независимого возбуждения (или группа двигателей) 14-17 управляются напряжениями с выходов генераторов постоянного тока 11-13. Шунты 18, 19 и 21, включенные последовательно с якорными обмотками двигателей, предназначены для измерения токов приводов подъема, напора и поворота. Сигналы с выходов указанных шунтов (датчиков тока), а также выходные напряжения генераторов действуют на входах блока вычисления электрической мощности приводов 21. Блок 21 формирует на выходе сигнал, пропорциональный полной суммарной электрической мощности приводов главного движения (подъема, напора и поворота).
Вращение генераторов 11-13 осуществляется приводным синхронным двигателем 6. Обмотка статора синхронного двигателя 6 подключена к питающей сети 6 кВ с помощью высоковольтной ячейки 2, содержащей разъединитель 3 и вакуумный выключатель 4. Обмотка ротора синхронного двигателя 6 подключена к выходу тиристорного преобразователя 7, управление которым производится по алгоритму стабилизации тока с помощью регулятора тока 9. Для измерения тока возбуждения синхронного двигателя 6 используется шунт 8, выход которого подключен к одному из входов регулятора тока 9. Сигнал задания для регулятора тока 9 формируется с помощью контроллера 10. На входах контроллера 10 действуют сигналы с выходов:
- датчика напряжения питающей сети 5;
- командоаппарата 1 привода подъема;
- блока вычисления полной мощности приводов 21;
- задатчика тока возбуждения 22.
Контроллер 10 выполняет следующие функции:
- аналого-цифровое преобразование сигналов, поступающих с выходов командоаппарата 1 u1, датчика напряжения 5 u5, блока вычисления полной мощности приводов 21 u21;
- вычисление суммы опорного постоянного сигнала u0, первого и второго корректирующих сигналов: uc1=u0+u1+u5;
- вычисление суммы опорного постоянного сигнала u0, первого корректирующего сигнала u5 и сигнала, пропорционального полной активной мощности приводов: uc2=u0+u5+u21;
- сравнение сигналов uc1 и uc2;
- формирование сигнала задания для регулятора тока возбуждения синхронного двигателя 6, равного максимальному значению из двух сигналов: uc1 или uc2.
Таким образом, на выходе контроллера 10 формируется сигнал, пропорциональный большему из двух: uc1 или uc2. Диаграмма формирования максимального сигнала из uc1 и uc2 показана на фиг.2.
Сигнал с выхода контроллера 10 поступает на вход регулятора тока возбуждения 9 и служит заданием для этого регулятора. Ток возбуждения синхронного двигателя 6 при этом устанавливается пропорциональным максимальному значению из двух сигналов: uc1 или uc2.
Следовательно, во всех режимах работы экскаватора ток возбуждения синхронного приводного двигателя корректируется в зависимости от напряжения питающей сети и нагрузки двигателя. Коррекция возбуждения синхронного двигателя, во-первых, определяется прогнозным способом в зависимости от положения командоаппарата подъема и, во-вторых, вычисляется путем суммирования полной электрической мощности приводов главного движения. Максимальное из двух вычисленных значений используется для регулирования тока возбуждения. Сигнал, пропорциональный полной активной мощности, обеспечивает уточнение коррекции тока возбуждения при недостаточном действии прогнозирующей коррекции. За счет такой коррекции повышается динамическая устойчивость синхронного двигателя во всех режимах работы экскаватора.
Таким образом, предлагаемый способ позволяет повысить динамическую устойчивость синхронного двигателя.
Другим важным достоинством предлагаемого способа является простота реализации способа. Это объясняется тем, что в современных цифровых системах управления приводами экскаваторов содержится информация о токах и напряжениях. Организация вычисления электрической мощности приводов осуществляется программно и не требует дополнительной аппаратуры.
Предлагаемый способ автоматического регулирования возбуждения синхронного приводного двигателя многомашинного агрегата экскаватора реализован и успешно испытан на отечественных экскаваторах ЭКГ-10, ЭКГ-12,5 и ЭКГ-15.
Следовательно, использование в предлагаемом способе автоматического регулирования возбуждения синхронного приводного двигателя многомашинного агрегата экскаватора, при котором устанавливают ток возбуждения в соответствии с сигналом задания, который формируют в виде суммы опорного постоянного сигнала, первого корректирующего сигнала, формируемого в виде постоянного напряжения при уменьшении действующего значения питающего напряжения ниже допустимого уровня, и второго корректирующего сигнала, формируемого в виде постоянного напряжения при положении командоаппарата подъема, превышающем заданное пороговое значение, дополнительно измерения полной электрической мощности приводов главного движения, суммирования полученного значения с опорным сигналом, сравнения двух вычисленных сумм и формирования сигнала задания тока возбуждения равным максимальной из двух сумм обеспечивает повышение динамической устойчивости синхронного приводного двигателя многомашинного агрегата экскаватора в различных режимах работы.
Использование предлагаемого технического решения на экскаваторах позволит повысить эффективность работы машин в горной промышленности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ ДИЗЕЛЬ-ГЕНЕРАТОРНАЯ СТАНЦИЯ ДЛЯ ПЕРЕГОНА ГОРНЫХ МАШИН | 2022 |
|
RU2790609C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ГЛАВНОГО ДВИЖЕНИЯ ЭКСКАВАТОРА | 2005 |
|
RU2288997C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ЭКСКАВАТОРА | 2001 |
|
RU2193630C1 |
| СПОСОБ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ПРИВОДА ОДНОКОВШОВОГО ЭКСКАВАТОРА В ЭКСПЛУАТАЦИОННЫХ РЕЖИМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376422C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА ОДНОКОВШОВОГО ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2255184C1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| Электропривод роторного экскаватора | 1986 |
|
SU1425285A1 |
| Устройство для регулирования тока возбуждения синхронного двигателя | 1985 |
|
SU1292158A1 |
| Устройство для защиты стрелы экскаватора | 1989 |
|
SU1649106A2 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
Изобретение относится к области электротехники и может быть использовано в низковольтных комплектных устройствах карьерных экскаваторов электрооборудования горнодобывающих машин. Техническим результатом является повышение динамической устойчивости приводного синхронного двигателя экскаватора при различных режимах работы. Способ предусматривает автоматическое регулирование возбуждения синхронного приводного двигателя многомашинного агрегата экскаватора путем поддержания тока возбуждения в соответствии с сигналом задания, который формируют в виде суммы опорного постоянного сигнала, первого корректирующего сигнала, формируемого в виде постоянного напряжения при уменьшении действующего значения питающего напряжения ниже допустимого уровня, и второго корректирующего сигнала, формируемого в виде постоянного напряжения при положении командоаппарата подъема, превышающем заданное пороговое значение, измерение полной электрической мощности приводов главного движения, суммирование полученного значения с опорным сигналом и первым корректирующим сигналом, сравнение двух вычисленных сумм и формирование сигнала задания тока возбуждения равным максимальной из двух сумм. 2 ил.
Способ автоматического регулирования возбуждения синхронного приводного двигателя многомашинного агрегата экскаватора, при котором устанавливают ток возбуждения в соответствии с сигналом задания, который формируют в виде суммы опорного постоянного сигнала, первого корректирующего сигнала, формируемого в виде постоянного напряжения при уменьшении действующего значения питающего напряжения ниже допустимого уровня, и второго корректирующего сигнала, формируемого в виде постоянного напряжения при положении командоаппарата подъема, превышающего заданное пороговое значение, отличающийся тем, что дополнительно измеряют полную электрическую мощность приводов главного движения, суммируют полученное значение с опорным сигналом и первым корректирующим сигналом, сравнивают две вычисленные суммы и формируют сигнал задания тока возбуждения, равный максимальной из двух сумм.
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ГЛАВНОГО ДВИЖЕНИЯ ЭКСКАВАТОРА | 2005 |
|
RU2288997C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ "МЯГКОГО" РЕЖИМА РАБОТЫ СЕТЕВЫХ СИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ НА КАРЬЕРНЫХ ЭКСКАВАТОРАХ (ЭКГ) | 2003 |
|
RU2260242C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ СИСТЕМЫ ГЕНЕРАТОР-ДВИГАТЕЛЬ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1995 |
|
RU2096563C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ЭКСКАВАТОРА | 2001 |
|
RU2193630C1 |
| Устройство управления электроприводом экскаватора | 1990 |
|
SU1733577A1 |
| US 4494050 А, 15.01.1985 | |||
| JP 63104589 A, 11.08.1988 | |||
| Установка для смешивания сыпучих материалов | 1984 |
|
SU1201159A1 |

