Изобретение относится к области разделения материалов, точнее к технологии очистки различных текучих сред (жидких, газообразных, сыпучих) посредством удаления из них примесей в виде магнитовосприимчивых склонных к магнитному осаждению феррочастиц с применением магнитных сепараторов.
Для гарантированной эффективной эксплуатации вновь создаваемых либо ранее созданных аппаратов очистки важное значение имеет уровень достоверности диагностирования и/или прогнозирования их функциональных свойств путем анализа характеристик магнитного поля в предназначенных для пропускания очищаемых сред рабочих объемах с целью выявления в них как наиболее активных (эффективных), так и пассивных зон. Причем целесообразно, чтобы такое диагностирование было ориентировано, прежде всего, на точное выявление в большей степени пассивных зон, т.е. зон со значительно ослабленной базовой характеристикой поля, с тем чтобы результат проведенного анализа предельно объективно отражал фактическую результативность воздействия поля на находящиеся в нем и проходящие сквозь него феррочастицы и, следовательно, эффективность очистки.
Известен способ идентификации пассивных зон в рабочем объеме магнитного очистного аппарата по признаку заниженных значений базовых параметров поля, например, подвергаемой измерению средней индукции в пустом рабочем объеме аппарата, представляющего собой поперечно протяженную фильтр-матрицу, локально намагничиваемую противостоящими разноименными магнитными полюсами (DE 3304597, 1986 г.). Значения средней индукции в фильтр-матрице находят в зависимости от удаленности места тестирования по отношению к центру симметрии рабочего объема. Затем, располагая полученной зависимостью, судят о степени убывания индукции - с выявлением слабонамагниченных, а значит, в известной мере пассивных, зон.
Такой способ применим, в основном, к рабочим объемам в виде поперечно протяженной, локально намагничиваемой фильтр-матрицы. В нем в качестве контролируемого параметра принимается лишь среднее значение индукции, а измерение параметра ведут по траектории поперечного перемещения измерительного датчика от центра симметрии рабочего объема: вдоль геометрического места точек, равноудаленных от полюсов, поэтому зависимости, которые отражали бы характер изменения индукции при ее измерении между противостоящими разноименными магнитными полюсами (от полюса к полюсу) в нем отсутствуют, что снижает уровень диагностики и ограничивает функциональный диапазон этого аналога.
Наиболее близким аналогом (прототипом) изобретения является способ идентификации пассивных зон в рабочем объеме магнитного сепаратора, содержащего магнитную систему для создания в этом объеме магнитного поля, например систему магнитных элементов с противостоящими разноименными магнитными полюсами, в том числе смещенными относительно друг друга в плоскостях этих полюсов, по признаку заниженных значений одного из базовых параметров в характеристике этого магнитного поля (RU 2305598, 2007 г.).
В прототипе характеристику магнитного поля определяют путем измерения в пустом рабочем объеме индукции B между двумя противостоящими магнитными полюсами магнитных элементов, по меньшей мере, одного блок-модуля системы, по траектории, объединяющей несколько различных точек рабочего зазора. Тем самым получают экстремальную зависимость изменения индукции по мере удаления x от одного из полюсов, с минимумом, приходящимся на середину x=b/2 межполюсного расстояния b. Центральную зону, т.е. зону с относительно малыми значениями B (штриховая линия B на фиг.6), обычно квалифицируют как пассивную.
Вместе с тем, как видно из графиков на фиг.4 в описании прототипа, что, хотя по мере удаления x от одного из полюсов индукция B в пределах полузазора снижается, даже в центральной зоне x=b/2, т.е. зоне минимума индукции, величина самой индукции B при определенном взаимном позиционировании магнитных элементов может быть достаточно высокой. Во всяком случае весьма высокое значение индукции здесь сравнительно легко обеспечивается соответствующей оптимизацией расстояния между полюсами, применением магнитных элементов с улучшенными свойствами, что как бы дает возможность избежать «провальных» значений индукции (в частности, обеспечивая, как в указанном патенте, значение индукции B=Bmin на уровне не ниже 30% от значения индукции вблизи магнитного элемента).
В результате такого концептуально неполного подхода в прототипе не обеспечивается достаточно объективная характеристика магнитного поля в рабочем объеме магнитного очистного аппарата, так как снижена достоверность идентификации пассивных зон, из-за недостаточного спектра используемых для идентификации характеристик поля. Это может явиться причиной грубых ошибок - вплоть до игнорирования фактического наличия пассивных зон, а также негативно сказаться на принятии технико-технологических решений при конструировании или модернизации аппаратов очистки и, безусловно, на эффективности их работы.
Заметим при этом, что значения индукции B, которую зачастую принимают в качестве контрольного параметра (в т.ч. и в прототипе), судя по данным фиг.1, всего лишь в 1,6-2 раза ниже по сравнению со значениями B вблизи магнитных полюсов и не могут служить достаточно убедительным аргументом для вынесения заключения об идентифицированной пассивной зоне.
Фактически же, как будет показано ниже, пассивная зона существует, ее доля может составлять, по меньшей мере, до 40%. Это означает, что более трети потока среды, проходящей через очистной аппарат с наличием такой зоны, по сути, является «транзитной», т.е. практически не подвергающейся очистке.
Задача, реализуемая изобретением, направлена на усовершенствование технологии диагностирования и/или прогнозирования служебных свойств магнитного очистного устройства с тем, чтобы иметь возможность существенно расширять круг паспортных характеристик магнитных сепараторов, а также получать объективную информацию об уровне работоспособности как вновь разрабатываемых и/или изготавливаемых, так и при решении о целесообразности модернизации устаревших и неудачных конструкций аппаратов такого назначения.
Технический результат, получаемый от реализации изобретения, состоит в повышении достоверности идентификации пассивных зон магнитного поля в рабочем объеме очистного аппарата путем расширения спектра используемых для этого характеристик поля.
Для достижения технического результата в способе идентификации пассивных зон в рабочем объеме магнитного сепаратора по признаку заниженных значений одного из базовых параметров в характеристике магнитного поля, создаваемого, по меньшей мере, одним блок-модулем с двумя магнитными элементами, которую получают путем измерения параметра в пустом рабочем объеме аппарата, согласно изобретению измерение осуществляют по траектории, совпадающей с предварительно выявленным ходом магнитных силовых линий поля, или по траектории, совпадающей с нормалью к поверхности полюсов магнитных элементов, получая первичную характеристику параметра, на основании которой затем путем ее дифференцирования получают характеристику градиента параметра, после чего обобщают обе эти характеристики взаимным умножением соответствующих первичных данных параметра и его градиента, получают информативную характеристику силового фактора поля, и выявленную на этой характеристике силового фактора зону с исчезающе малыми значениями идентифицируют как пассивную.
В частных случаях реализации изобретения:
- в качестве базового параметра измеряют индукцию В поля, получая первичную характеристику индукции В=Bl при ее измерении по траектории, совпадающей с предварительно выявленным ходом магнитных силовых линий поля, или индукцию В=Bn при ее измерении по траектории, совпадающей с нормалью к поверхности полюсов магнитных элементов;
- в качестве базового параметра измеряют напряженность Н поля, получая, как и при измерении индукции, первичную характеристику напряженности Н=Hl или Н=Hn соответственно.
Дополнительные отличия заключаются в том, что:
- характеристику В=Bn или Н=Hn получают используя данные измерения параметра, которые получают для одного магнитного элемента с последующей суперпозицией индукции полей, создаваемых этим и модельно противостоящим ему магнитным элементом;
- первичную характеристику индукции В=Bl или напряженности Н=Hl получают путем преобразования характеристики В=Bn, которое осуществляют по формуле Bl=Bn/cosα, или преобразования характеристики Н=Hn, которое осуществляют по формуле Hl=Hn/cosα, где - угол между нормалью к поверхности полюса и ходом магнитной силовой линии.
Расширение спектра характеристик поля, используемых для идентификации пассивных (провальных) зон, способствует повышению уровня достоверности процесса идентификации, т.к. позволяет определять пассивные зоны, как зоны не столько с ослабленным значением базового параметра (индукции B или напряженности Н), сколько с ослабленным значением силового фактора поля, т.е. B·gradB или H·gradH.
Справедливость именно такого концептуального подхода следует из фактической роли поля в силовом воздействии на магнитовосприимчивые примеси-частицы. Так, необходимо принять во внимание, что сила F магнитного притяжения таких примесей-частиц зависит, как известно, от силового фактора, записываемого как B·dB/dx=B·gradB и как H·dH/dx=H·gradH, т.е. F~B·gradB, F~H·gradH. Отсюда видно, что параметром, существенно влияющим на силу захвата таких феррочастиц, является не только индукция или напряженность (B или H), а и градиент индукции или напряженности (dB/dx или dH/dx).
Предлагаемый способ обеспечивает получение исходной характеристики базового параметра, например индукции B, для магнитной системы, содержащей, по меньшей мере, один блок-модуль из двух магнитных элементов с противостоящими, в том числе смещенными, разноименными полюсами (как и способ-прототип). Причем способ позволяет характеристику B получать отчасти облегченными и, в то же время, более универсальными приемами, не прибегая к взаимному позиционированию магнитных элементов (фиксируя в каждом конкретном случае тот или иной зазор между ними), а в отсутствие противостоящего полюса, т.е. воспользоваться уединенным магнитным элементом с использованием принципа суперпозиции, взяв в качестве модели систему, состоящую из этого уединенного магнитного элемента и условно противостоящего ему магнитного элемента.
Такие преимущества способа значительно расширяют диапазон его функциональных возможностей.
Способ проиллюстрирован чертежами.
На фиг.1 показан установленный количественный характер снижения (в пределах полузазора между противостоящими магнитными полюсами) магнитной индукции B - по мере удаления x от поверхности одного из полюсов.
На фиг.2 (фото) - иллюстрация хода магнитных силовых линий между двумя противостоящими магнитными полюсами:
а) без смещения полюсов - видно, что для межполюсной рабочей области, почти полностью «охватываемой» собственным габаритом самих полюсов, ход магнитных силовых линий практически нормален поверхностям полюсов;
б) со смещением полюсов - видно, что магнитные силовые линии искривляются, при этом в пределах полузазора угол отклонения силовой линии от нормали к поверхностям полюсов увеличивается, что необходимо учитывать на практике.
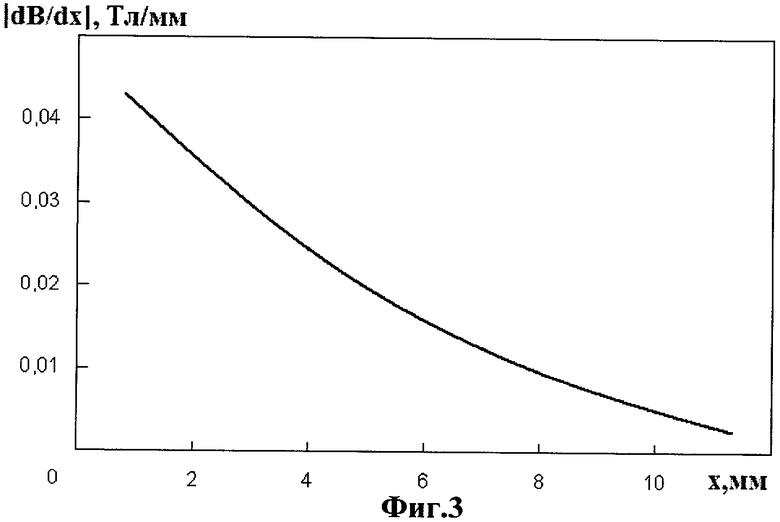
На фиг.3 показана характеристика градиента индукции |dB/dx| (модуля этого градиента), полученная на основании характеристики, изображенной на фиг.1, путем ее графического (или аналитического) дифференцирования.
Видно, что найденная кривая градиента индукции |dB/dx|, как и кривая индукции B (фиг.1), по мере удаления x от поверхности полюсов убывает.
На фиг.4 показана характеристика силового фактора B·|dB/dx|, полученная на основании характеристик, изображенных на фиг.1 и фиг.3, - путем взаимного умножения соответствующих данных B и |dB/dx|.
Видно, что найденная кривая силового фактора B·|dB/dx| по мере удаления x от поверхности полюсов убывает. При этом, как и следовало ожидать, она убывает более интенсивно, чем каждая из кривых-сомножителей B и |dB/dx|. И, судя по исчезающее малым значениям B·|dB/dx|, более трети потока среды, проходящей через сепаратор (содержащий зону со значительно ослабленными значениями силового фактора), является, по сути, «транзитной», т.е. практически не подвергающейся очистке.
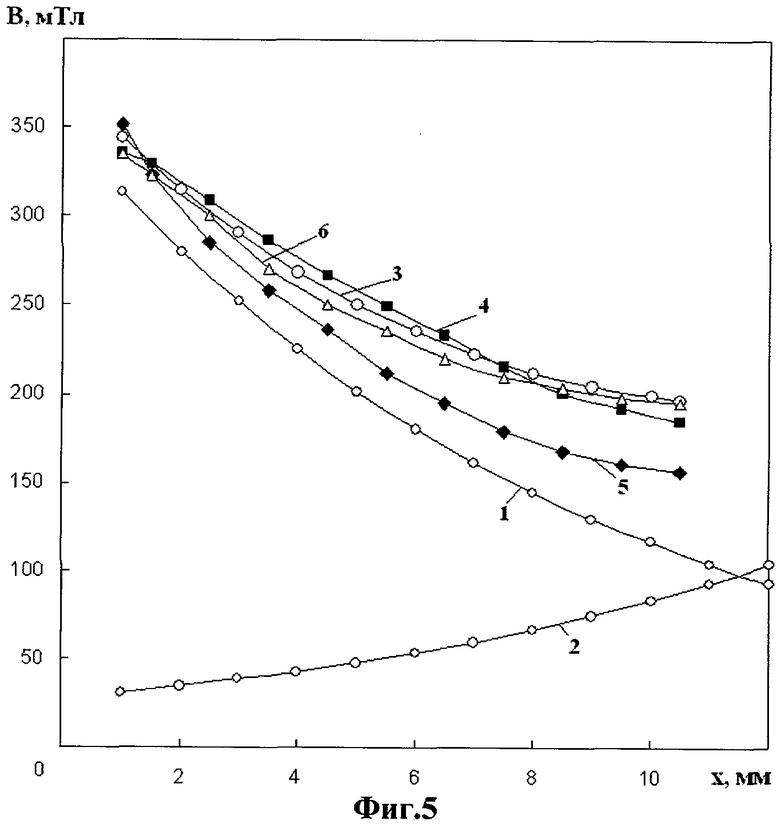
На фиг.5 приведены различные характеристики индукции (в пределах фиктивного и фактического полузазора 0<x≤b/2=11,5 мм между двумя противостоящими разноименными полюсами) - в подтверждение возможности применения принципа суперпозиции для альтернативного нахождения (без непосредственного измерения индукции в фактическом зазоре между полюсами) результирующей характеристики индукции поля:
1 - для исследуемого одиночного магнитного элемента;
2 - то же, но хвостовая часть ее симметричного отображения (для аналогичного магнитного элемента, условно противостоящего исследуемому элементу);
3 - результат суперпозиции характеристик 1 и 2 (т.е. расчетная модель);
4 - для пары противостоящих полюсов магнитных элементов без их взаимного смещения;
5 - для пары противостоящих полюсов магнитных элементов при их взаимном смещении (и образовании области их взаимного «теневого» перекрытия);
6 - результат пересчета данных кривой 5: путем деления данных индукции на cos α, причем угол α между нормалью к поверхности полюса и магнитной силовой линией непостоянен и находится на основании предварительно идентифицированного (см. фиг.2б) хода магнитных силовых линий.
Видно, что кривая 6, как скорректированный вариант кривой 5, согласуется с кривыми 3 и 4, полученными для фактически противостоящих разноименных полюсов.
На фиг.6 - иллюстрация характера изменения индукции поля B и силового фактора B·gradB между противостоящими разнополярными магнитными полюсами, находящимися на расстоянии b друг от друга, в зависимости от удаления x по отношению к поверхности одного из полюсов. По мере удаления x от поверхности одного из полюсов индукция поля B и силового фактора B·gradB снижаются вплоть до середины (x=b/2) межполюсного расстояния (зазора) b. В целом же зависимости B и B·gradB от x являются экстремальными (для равноценных полюсов - симметричными). В отличие от значений B более объективную информацию дают значения силового фактора B·gradB. В окрестности x=b/2 они являются не только минимальными, но и исчезающе малыми, что однозначно свидетельствует о наличии пассивной зоны.
Способ реализуется в рабочем объеме магнитного сепаратора, магнитное поле в котором образовано системой, содержащей блоки-модули из двух магнитных элементов: с противостоящими, в том числе смещенными, разноименными полюсами.
Используя одну из известных измерительных систем, осуществляют пошаговое измерение одного из базовых параметров: фактической индукции или напряженности поля, перемещая измерительный датчик в пустом рабочем объеме между двумя магнитными элементами одного блок-модуля системы по направлению x в зависимости от выбранной траектории измерения, совпадающей с предварительно выявленным ходом магнитных силовых линий поля или с нормалью к поверхности полюсов (фиг.2, 6). В частности, между полностью противостоящими магнитными полюсами направление x практически во всем рабочем объеме, «охватываемом» собственным габаритом магнитных элементов, соответствует предварительно выявленному ходу магнитных силовых линий (фиг.2б).
Далее пояснение сущности способа дано на примере его осуществления, когда в качестве базового параметра принимается индукция поля, измеряемая, например, миллитесламетром с датчиком Холла.
По полученным данным измерения индукции B строят графическую зависимость индукции B от пути x перемещения измерительного датчика (фиг.1) и получают первичную характеристику В=Bl при измерении по траектории, совпадающей с предварительно выявленным ходом магнитных силовых линий, или первичную характеристику В=Bn при измерении по траектории, совпадающей с нормалью к поверхности полюсов. То же можно выполнить, измеряя напряженность поля H=B/µ0, где µ0=4π·10-7 Гн/м - магнитная константа.
Характеристику В=Bn можно получить, пользуясь не парой магнитных элементов с противостоящими разноименными магнитными полюсами, а одним магнитным элементом. При этом пошаговое измерение индукции поля достаточно произвести вдоль пути перемещения, совпадающего с нормалью к поверхности лишь одного полюса. Далее следует воспользоваться принципом суперпозиции, взяв в качестве модели систему, состоящую из этого магнитного элемента и условно противостоящего ему такого же, но с противоположной полярностью, магнитного элемента (т.е. с такой же, но «зеркальной» характеристикой). Сложение соответствующих значений индукции полей даст результирующие, соответствующие фактическим, значения индукции B (фиг.5, кривые 1-4).
Такой же прием суперпозиции применим к области взаимного «теневого» перекрытия при взаимном смещении противостоящих полюсов (кривая 5 на фиг.5). Здесь значения B - формальные результирующие значения индукции, не учитывающие специфику взаимного положения магнитных полюсов и фактически изменившийся ход магнитных силовых линий, но если эти результирующие (формальные) значения индукции разделить на cosα (α - угол между нормалью к поверхности полюса и магнитной силовой линией, изменяющей свою кривизну), то тем самым можно получить фактические значения B (фиг.5, кривая 6).
Далее, используя первичную характеристику В=Bl или В=Bn, т.е. характеристику B от x, получают характеристику ее градиента gradB (фиг.3). Для этого осуществляют графическое дифференцирование полученной зависимости B от x, или в случае, если удается найти ее функциональный вид, аналитическое дифференцирование.
После этого получают характеристику магнитного силового фактора поля B·gradB (фиг.4) как наиболее информативную для идентификации пассивных зон характеристику. Для этого обобщают характеристики индукции B и ее градиента gradB единой характеристикой путем взаимного умножения соответствующих данных B и gradB с последующим анализом обобщенной зависимости B·gradB. По наличию на обобщенной зависимости B·gradB участков с исчезающе малыми значениями B·gradB идентифицируют их как пассивные зоны, судят о их местонахождении, размерах, а следовательно, и об уровне работоспособности рабочего объема аппарата, а также о возможности принятия рациональных технико-технологических решений, направленных на ликвидацию или уменьшение этих зон.
При использовании напряженности поля H в качестве базового параметра способ осуществляется в том же описанном выше порядке. Возможен вариант реализации способа, когда характеристики поля получают по двум параметрам: индукция плюс напряженность.
В конкретном примере осуществления способа применялись широко используемые при создании магнитных очистных устройств высокоэнергетичные постоянные магниты Nd-Fe-B диаметром 25 мм и толщиной 10 мм. При этом датчик для измерения индукции поля (датчик Холла) перемещали внутри межполюсного расстояния (зазора) b=23 мм между разноименными полюсами магнитных элементов нормально поверхностям этих полюсов.
После получения первичной характеристики индукции (фиг.1) находили характеристику ее градиента (фиг.3) и, в конечном счете - характеристику силового фактора (фиг.4), подвергая анализу его значение.
Например, судя по полученной характеристике магнитного силового фактора B·gradB, показанной на фиг.3, зоной с весьма малыми значениями B·gradB следует признать зону (6…8)мм<x≤b/2=11,5 мм - для полузазора и соответственно зону (6…8)мм<x≤(15…17)мм - в целом для зазора между противостоящими магнитными полюсами. Здесь значения B·gradB (фиг.3) в 5-30 и более раз ниже по сравнению со значениями B·gradB вблизи магнитных полюсов. Следовательно, силовой фактор становится весьма малым на расстоянии от x=6-8 мм (среднее x=7 мм) до x=b/2=11,5 мм. Это означает, что для рассматриваемого полузазора b/2=11,5 мм (равно как и для всего зазора b=23 мм) доля пассивной зоны составляет, по меньшей мере, величину [(11,5-7)/11,5]·100%=39%.
Использование предлагаемого способа, основанного на усовершенствовании технологии диагностирования рабочего объема магнитного сепаратора, позволяет достоверно идентифицировать в нем пассивные зоны, а именно зоны с исчезающе малыми значениями магнитного силового фактора. Это представляет собой необходимую для разработчиков и эксплуатационников магнитных очистных аппаратов информацию, прежде всего, для объективного определения уровня работоспособности аппарата, а также для создания и промышленного использования аппаратов, лишенных таких зон, а значит, обеспечивающих эффективное удаление ферропримесей из очищаемых рабочих сред.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ СЕПАРАТОР | 2007 |
|
RU2346748C1 |
| СЕПАРАТОР | 2005 |
|
RU2305598C2 |
| МАГНИТНЫЙ СЕПАРАТОР | 2005 |
|
RU2305008C2 |
| Способ диагностики исполнительной зоны магнитометров пондеромоторного и магнитно-реологического типов | 2024 |
|
RU2837068C1 |
| Способ магнитно-реологического контроля магнитной восприимчивости частицы | 2020 |
|
RU2753159C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ И ДИАГНОСТИКИ ЗОНЫ СТАБИЛЬНОЙ НЕОДНОРОДНОСТИ МАГНИТНОГО ПОЛЯ | 2020 |
|
RU2737609C1 |
| МАГНИТНЫЙ СЕПАРАТОР | 2001 |
|
RU2197330C2 |
| Способ магнитно-реологической диагностики магнитной восприимчивости частицы при ее магнитоуправляемом перемещении в жидкости | 2023 |
|
RU2805765C1 |
| МАГНИТНЫЙ СЕПАРАТОР | 2005 |
|
RU2305009C2 |
| МАГНИТНЫЙ СЕПАРАТОР | 2005 |
|
RU2300421C1 |



Изобретение относится к технологии и технике очистки текучих сред посредством удаления из них феррочастиц магнитными сепараторами. Согласно способу диагностику базового параметра: индукции или напряженности осуществляют по траектории, совпадающей с предварительно выявленным ходом магнитных силовых линий поля или по траектории, совпадающей с нормалью к поверхности полюсов магнитных элементов. На основании одной из первичных характеристик этого параметра получают характеристику градиента параметра. После чего обобщают обе эти характеристики взаимным умножением соответствующих данных параметра и его градиента, получая тем самым информативную характеристику силового фактора поля. Выявленную на этой характеристике зону с исчезающе малыми значениями силового фактора идентифицируют как пассивную. Техническим результатом является повышение достоверности идентификации пассивных зон в рабочем объеме магнитного сепаратора. 6 з.п. ф-лы, 6 ил.
1. Способ идентификации пассивных зон в рабочем объеме магнитного сепаратора по признаку заниженных значений одного из базовых параметров в характеристике магнитного поля, создаваемого, по меньшей мере, одним блок-модулем с двумя магнитными элементами, которую получают путем измерения параметра в пустом рабочем объеме сепаратора, отличающийся тем, что измерение осуществляют по траектории, совпадающей с предварительно выявленным ходом магнитных силовых линий поля, или по траектории, совпадающей с нормалью к поверхности полюсов магнитных элементов, получая первичную характеристику параметра, на основании которой затем путем ее дифференцирования получают характеристику градиента параметра, после чего обобщают обе эти характеристики взаимным умножением соответствующих первичных данных параметра и его градиента, получают информативную характеристику силового фактора поля и выявленную на этой характеристике силового фактора зону с исчезающе малыми значениями идентифицируют как пассивную.
2. Способ по п.1, отличающийся тем, что в качестве базового параметра измеряют индукцию В поля, получая первичную характеристику индукции B=B1 при ее измерении по траектории, совпадающей с предварительно выявленным ходом магнитных силовых линий поля, или индукции В=Вn при ее измерении по траектории, совпадающей с нормалью к поверхности полюсов магнитных элементов.
3. Способ по п.2, отличающийся тем, что характеристику В=Вn получают, используя данные измерения индукции, которые получают для одного магнитного элемента с последующей суперпозицией индукции полей, создаваемых этим и модельно противостоящим ему магнитным элементом.
4. Способ по п.2 или 3, отличающийся тем, что характеристику индукции В=В1 получают путем преобразования характеристики В=Вn, которое осуществляют по формуле B1=Bn/cosα, где α - угол между нормалью к поверхности полюса и ходом магнитной силовой линии.
5. Способ по п.1, отличающийся тем, что в качестве базового параметра измеряют напряженность Н поля, получая, как и при измерении индукции, первичную характеристику напряженности H=H1 или Н=Нn соответственно.
6. Способ по п.2, отличающийся тем, что характеристику Н=Нn получают, используя данные измерения индукции, которые получают для одного магнитного элемента с последующей суперпозицией индукции полей, создаваемых этим и модельно противостоящим ему магнитным элементом.
7. Способ по п.2 или 3, отличающийся тем, что характеристику напряженности Н=Н1 получают путем преобразования характеристики Н=Нn, которое осуществляют по формуле H1=Hn/cosα, где α - угол между нормалью к поверхности полюса и ходом магнитной силовой линии.
| СЕПАРАТОР | 2005 |
|
RU2305598C2 |
| МАГНИТНЫЙ СЕПАРАТОР | 2007 |
|
RU2346748C1 |
| МАГНИТНЫЙ СЕПАРАТОР | 1992 |
|
RU2047385C1 |
| МАГНИТНЫЙ СЕПАРАТОР | 2005 |
|
RU2305008C2 |
| МАГНИТНЫЙ СЕПАРАТОР С ФЕРРИТОВЫМИ И РЕДКОЗЕМЕЛЬНЫМИ ПОСТОЯННЫМИ МАГНИТАМИ | 2003 |
|
RU2324542C2 |
| Магнитный барабан для очистки семян от примесей | 1990 |
|
SU1734855A1 |
| JP 55111813 А, 06.08.1980 | |||
| DE 3304597 А1, 16.08.1984. | |||

