Изобретение относится к области управления сложными объектами техники, работающими в широком диапазоне режимов и нагрузок, контроль которых в процессе работы осуществляется по нескольким параметрам, и может быть использовано для управления авиационными газотурбинными двигателями (ГТД).
При эксплуатации ГТД последних модификаций большое значение имеют контроль и регулирование таких параметров, как тяга, запасы газодинамической устойчивости, температура газов в основной и форсажной камерах сгорания. Традиционно такие параметры определяются по ряду косвенных параметров, определяемых по установленным экспериментально или полученным расчетным путем зависимостям, осуществляют перерасчет этих параметров для определения неизмеряемых значений. В полетных условиях данные параметры рассчитываются и регулируются с помощью математической модели ГТД, заложенной в программный блок системы управления ГТД.
Из уровня техники известны системы управления, включающие бортовую имитационную моделью ГТД, которая позволяет формировать сигналы параметров ГТД, замер которых затруднен или невозможен.
Так, например, известна реализующая способ система управления ГТД, содержащая исполнительные органы, обеспечивающие управление агрегатами ГТД, датчики: температуры и давления воздуха; давления в компрессоре ГТД; частоты вращения ротора ГТД; положения направляющих аппаратов компрессора. Система оснащена последовательно соединенными блоком приведения давления в компрессоре, блоком формирования приведенной частоты вращения и блоком вычисления значения сигнала отказавшего датчика, а также сигнализатором, связанным через селектор с блоком формирования заданного значения частоты вращения ротора, связанным с одним входом элемента сравнения, с другим входом которого связан блок вычисления значения сигнала отказавшего датчика, а выход элемента сравнения связан с исполнительными органами.
При штатной работе системы управления ГТД на элемент сравнения поступают сигналы с датчика частоты вращения ротора ПД и с блока формирования заданного значения частоты вращения ротора. Разность сигналов поступает на исполнительные органы, которые обеспечивают заданный расход топлива.
При отказе одного из датчиков по сигналу сигнализатора селектор прерывает связь с данным датчиком и соединяет с селектором минимума выход блока вычисления значения сигнала отказавшего датчика. В данном случае заданное значение параметра формируется по его "виртуальному" измерению, осуществляемому в блоке вычисления значения сигнала отказавшего датчика и система управления остается работоспособной (см. патент РФ №2319025, кл. F02C 9/00, 2008).
В результате анализа известной системы необходимо отметить, что недостатком ее является то, что в ней отсутствует информация о том, насколько точно в данный момент времени модели или предварительно сформированные функциональные зависимости отражают текущее состояние двигателя. В то же время реальное текущее состояние двигателя, и, прежде всего, его температурное состояние могут в значительной степени влиять на точность вычисления «виртуальных» параметров по соотношениям и моделям, полученным при их формировании.
Известна система управления ГТД, содержащая дозатор подачи топлива в камеру сгорания. Параметры работы ГТД отслеживаются следующими датчиками: температуры и давления за вентилятором; температуры и давления за компрессором; температуры и давления за турбинами; частоты вращения роторов компрессора и вентилятора; расхода топлива в камере сгорания. Выход каждого датчика связан со своим логарифмическим преобразователем. Выходы логарифмических преобразователей связаны с входами усилителей, выходы которых связаны с сумматором.
Система управления оснащена элементом сравнения, первый вход которого связан с задатчиком режимов работы ГТД бортовой системы. Второй вход элемента сравнения через преобразователь антилогарифма связан с выходом сумматора.
Выход элемента сравнения связан с первым входом изодромного регулятора, второй вход которого связан с адаптером внешних условий, в соответствии с которыми корректируются условия работы ГТД. Выход изодромного регулятора связан с дозатором подачи топлива в камеру сгорания ГТД.
При работе ГТД управляющий сигнал заданного расхода топлива в камеру сгорания от бортовой системы управления поступает на задатчик. С задатчика он поступает на первый вход элемента сравнения. На второй вход элемента сравнения подается приведенный сигнал фактического значения температуры газа в камере сгорания, формирование которого основано на приведенной в описании регрессионной зависимости. С каждого датчика сигналы, характеризующие работу ГТД, поступают в преобразователи, где преобразуются в логарифмические величины. Логарифмирование осуществляется по известной зависимости ln(Xi), где Xi - показание датчика. Полученные сигналы логарифмов каждого параметра Xi усиливаются в усилителях пропорционально соответствующему показателю степени этого параметра Ci в регрессивной зависимости и суммируются. Далее полученное текущее (фактическое) значение сигнала логарифма lnT*Г потенцируется по зависимости I*Г=exp(lnT*Г), и значение Т*Г передается на второй вход элемента сравнения, где определяется рассогласование между фактическими и заданным значениями температуры газов. Сформированные таким образом управляющие (командные) сигналы подаются на первый вход изодромного регулятора, на второй вход которого подаются сигналы с адаптера. Полученные управляющие сигналы подаются на исполнительный механизм дозатора, регулируя подачу топлива в камеру сгорания ГТД, которая осуществляется с учетом реальной температуры газа в ней (см. патент РФ №2409751, кл. F02C 9/28, 2011).
В результате анализа известной системы управления необходимо отметить, что в ней, как и в приведенной выше, недостатком является невозможность контроля модели двигателя с учетом его реального состояния.
Известна система управления ГТД, содержащая набор датчиков, контролирующих параметры работы ГТД, приводы агрегатов ГТД и регуляторы, осуществляющие управление приводами, блок формирования программ управления ГТД, программный блок, в который заложена термогазодинамическая модель двигателя, первый элемент сравнения, предназначенный для сравнения заданных параметров с их фактическими измерениями, второй элемент сравнения, предназначенный для сравнения заданных параметров с виртуальными измерениями программного блока. Первые входы элементов сравнения связаны с выходами блока формирования программ управления ГТД, второй вход первого элемента сравнения связан с датчиками, а второго - с выходом программного блока, один из входов которого связан с датчиками. Выходы элементов сравнения связаны с регуляторами, управляющими приводами, а также с другим входом программного блока.
При работе системы блок формирования программ управления формирует заданные значения параметров по фактическим и программным параметрам, которые сравниваются на блоках сравнения соответственно с фактическими и программными значениями, которые формируются соответственно датчиками и программным блоком. Результаты сравнения - ошибки регулирования подвергаются динамической коррекции в регуляторах и полученные сигналы управления подаются на управляющие приводы ГТД и программный блок (см. A. Kreiner, K. Lietzau. The use of onboard real-time models for jet engine Control. MTU Aero Engines, Germany, 2000) наиболее близкий аналог.
В результате анализа известной системы необходимо отметить, что для нее характерны невозможность контроля точности формирования моделью «виртуальных» измерений, а также контроля точности и достоверности фактических измерений, поступающих с датчиков. В то же время точность «виртуальных» измерений зависит от текущего, прежде всего, температурного состояния двигателя, которое не учитывается в программном блоке, а точность и достоверность (фактических измерений зависит от возможных сбоев и отказов датчиков, приводов и элементов самого ГТД.
Техническим результатом настоящего изобретения является повышение точности управления ГТД за счет обеспечения контроля точности формирования моделью «виртуальных» измерений, а также за счет обеспечения контроля точности и достоверности фактических измерений в условиях возможных сбоев и отказов датчиков, приводов и элементов агрегатов самого ГТД.
Указанный технический результат обеспечивается тем, что в системе управления газотурбинным двигателем, включающей датчики контроля параметров работы двигателя, приводы перемещения исполнительных механизмов агрегатов двигателя, связанные с выходами регуляторов, первый и второй элементы сравнения, первый вход каждою из которых связан с выходом блока формирования программ управления, второй вход первого элемента сравнения связан с датчиками, а второго - с первым выходом программного блока, в который заложена термогазодинамическая модель двигателя, второй вход которого связан с датчиками, выходы элементов сравнения связаны с регуляторами, выход каждого из которых дополнительно связан с первым входом программного блока, новым является, то. что система оснащена третьим элементом сравнения, блоком памяти контрольных точек диагностики, блоком коррекции статических характеристик модели и блоком диагностики, выход блока коррекции статических характеристик модели связан с третьим входом программного блока и первым входом блока диагностики, второй вход которого связан с датчиками, а третий -с блоком памяти контрольных точек диагностики, первый вход третьего элемента сравнения связан с датчиками, второй - со вторым выходом программного блока, а выход - с входом блока коррекции статических характеристик модели и с четвертым входом блока диагностики, выход которого связан с входом блока формирования программ управления.
Сущность заявленного изобретения поясняется графическими материалами, на которых представлена схема системы управления ГТД.
Система управления ГТД 1 состоит из датчиков 2 контроля параметров работы ГТД (частот вращения компрессора и вентилятора, температур воздуха и газов за турбиной, давлений воздуха на входе двигателя и за компрессором, положения направляющих аппаратов и др.). Агрегаты управления расходом топлива в основную и форсажную камеры и управления механизацией ГТД оснащены электро- и гидромеханическими приводами (например, типа ПЭМ преобразователи электромеханические с сервозолотниками) 3. Управление приводами 3 осуществляется от регуляторов 4 (на схеме датчики 2, приводы 3, регуляторы 4 показаны в виде единого блока. Естественно, что на реальном ГТД они установлены на штатных местах).
Система оснащена блоком 5 формирования программ управления в соответствии с задаваемым режимом, первым элементом 6 сравнения заданных параметров с фактическими измеренными, программным блоком 7, в который заложена термогазодинамическая модель ГТД и вторым элементом 8 сравнения заданных значений неизмеряемых параметров работы ГТД (таких, как температура в камере сгорания, запасы газодинамической устойчивости, тяга) с их «виртуальными» модельными значениями. Система также оснащена третьим элементом 9 сравнения фактических измерений с их модельными оценками, блоком 10 коррекции статических характеристик термогазодинамической модели с целью компенсации «ухода» ее параметров от параметров двигателя, блоком 11 диагностики системы управления и двигателя и блоком 12 памяти эталонных точек диагностики, содержащих наборы значений входных и выходных параметров двигателя на типовых эксплуатационных и контрольных режимах работы.
Блок 5 имеет два входа и два выхода. Первый вход связан с задатчиком (не показан) программы (режима) работы ГТД (например, РУД), а второй - с выходом блока 11 диагностики. Первый выход блока 5 связан с первым входом первого элемента 6 сравнения, а второй - с первым входом второго элемента 8 сравнения. Второй вход первого элемента сравнения связан с датчиками 2. а второй вход второго элемента сравнения - с первым выходом блока 7. Выходы элементов сравнения 6 и 8 связаны с входами регуляторов 4. Выходы регуляторов связаны с соответствующими приводами 3 перемещения исполнительных механизмов ГТД, а также с первым входом блока 7, со вторым входом которого связаны датчики 2, а с третьим - выход блока 10. Выход блока 10 также связан с первым входом блока 11, со вторым входом которого связаны датчики 2, с третьим - выход блока 12. Первый вход третьего элемента 9 сравнения связан с датчиками, второй вход которого связан со вторым выходом блока 7, а выход элемента сравнения 9 связан с входом блока 10 и с четвертым входом блока 11.
Система скомпонована из известных блоков и элементов.
Приводы блока 4 являются стандартными и подбираются известным образом при проектировании конкретной модификации ГТД.
В качестве регуляторов блока 4 могут быть использованы типовые электронные или электрогидравлические регуляторы.
В качестве блока 5 формирования программ управления, элементов сравнения 6, 8, 9, программного блока 7, блока 10 коррекции статических характеристик модели, блока 11 диагностики, могут быть использованы микроконтроллеры, например 1986ВЕ91 фирмы Миландр (г.Зеленоград).
Блок 10 коррекции статических характерно гик обеспечивает подстройку зависимостей параметров регулирования двигателя частот вращения, температур и давлений - от расхода топлива на установившихся режимах.
В качестве блока 12 памяти эталонных точек диагностики могут быть использованы микросхемы памяти, например, 1645РУ2Т, в которых содержатся наборы значений входных и выходных параметров двигателя для типовых эксплуатационных и контрольных режимов работы.
В системе используются стандартные датчики частот вращения компрессора и вентилятора, температур воздуха и газов за турбиной, давлений воздуха на входе двигателя и за компрессором, положения направляющих аппаратов и др.
Система управления ГТД работает следующим образом.
Работу системы управления рассмотрим на примере управления ГТД по следующим параметрам: частота вращения компрессора, температура в камере сгорания. Для этого в блок 2 датчиков входят следующие датчики: частот вращения компрессора и вентилятора, температур воздуха и газов за турбиной, давлений воздуха на входе двигателя и за компрессором, положения направляющих аппаратов. При работе системы осуществляется управление агрегатом дозирования основного топлива ГТД. Следовательно, в блок регуляторов входят следующие регуляторы: регулятор частоты вращения, регулятор температуры в камере сгорания, а блок приводов состоит из дозатора топлива в основную камеру сгорания. Это вовсе не означает, что для управления ГТД не могут быть использованы иные параметры, например давления и температуры газов, положения направляющих аппаратов, запас газодинамической устойчивости, тяга.
В процессе работы ГТД блок 5 формирования программ управления ГТД формирует заданные значения по фактически измеряемым параметрам - частотам вращения компрессора и вентилятора и по давлению за компрессором - и по «виртуальному» параметру температуре в камере сгорания, которые сравниваются на элементах сравнения 6 и 8 соответственно с фактическими и «виртуальными» параметрами работы ГТД, формируемыми соответственно датчиками 2 и термогазодинамической моделью двигателя, заложенной в программный блок 7. Результаты сравнения - ошибки регулирования подвергаются динамической коррекции в регуляторах 4, и полученные сигналы управления подаются на управляющие приводы 3 ГТД 1 и на программный блок 7. Формируемые в блоке 7 оценки фактических измерений подаются на второй вход элемента сравнения 9, где сравниваются с поступающими на первый вход с датчиков 2 фактическими измерениями параметров работы ГТД. Сформированные значения разностей между оценками и фактическими измерениями подаются на вход блока коррекции 10 статических характеристик модели и на четвертый вход блока диагностики 11. Сформированные в блоке коррекции 10 ошибки статических характеристик модели поступают в блок 7 для коррекции ее статических характеристик, т.е. зависимостей параметров регулирования двигателя частот вращения, температур и давлений - от расхода топлива на установившихся режимах с целью минимизации ошибок оценок фактических измерений. Параллельно блок диагностики 11 сравнивает фактически измеренные параметры, поступающие с датчиков на второй вход данного блока, последовательно со всеми эталонными точками, заранее сформированными на этапе заводских испытаний и занесенными в блок памяти 12. При совпадении набора фактических измерений с одной из эталонных точек диагностики в блоке 11 производится сравнение ошибок оценок измерений и ошибок статических характеристик модели с заранее установленными пороговыми значениями. При превышении пороговых значений формируются сигналы отказов компонентов системы (датчиков, приводов и элементов ГТД), которые поступают в блок 5 для соответствующей коррекции заданных режимов управления.
По сравнению с наиболее близким аналогом данная система обладает весьма существенными преимуществами. В наиболее близком аналоге отсутствует возможность контроля точности формирования моделью «виртуальных» измерений, а также контроля точности и достоверности фактических измерений, поступающих с датчиков. В предлагаемой системе этот недостаток устраняется благодаря тому, что термогазодинамическая модель двигателя, заложенная в программный блок 7, наряду с «виртуальными» параметрами формирует и оценки фактически измеряемых параметров. Данные оценки сравниваются в блоке 9 с фактическими измерениями и результаты сравнения (ошибки) служат для проверки в блоке диагностики 11 корректности работы модели. Если ошибки малы, то модель считается корректно работающей, и эти малые ошибки используются в блоке 10 для подстройки статических характеристик модели. Одновременно блок диагностики 11 анализирует величину корректирующих поправок к статическим характеристикам модели. Если ошибки оценок фактически измеряемых параметров или величины поправок к статическим характеристикам модели велики, т.е. превышают заранее установленный предел, то блок диагностики 11 выдает сигналы отказа на блок 5 формирования программ управления. Таким образом, предотвращается возможность работы системы как в случае потери точности формирования моделью «виртуальных» измерений, так и в случае возникновения отказов в измерениях фактических параметров.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВАЯ ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ С ВСТРОЕННОЙ ПОЛНОЙ ТЕРМОГАЗОДИНАМИЧЕСКОЙ МАТЕМАТИЧЕСКОЙ МОДЕЛЬЮ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И АВИАЦИОННЫЙ ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2554544C2 |
| Система управления турбокомпрессорной установкой | 2018 |
|
RU2691273C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2006 |
|
RU2319025C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2432501C1 |
| СПОСОБ ДИАГНОСТИКИ И ПАРИРОВАНИЯ ОТКАЗОВ ДАТЧИКОВ РЕГУЛИРУЕМЫХ ПАРАМЕТРОВ ДВУХКАНАЛЬНОЙ ЭЛЕКТРОННОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2817573C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕПУСКОМ ВОЗДУХА В КОМПРЕССОРЕ ДВУХВАЛЬНОГО ДВУХКОНТУРНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2001 |
|
RU2214535C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2425255C1 |
| Система управления положением направляющих аппаратов компрессора газотурбинного двигателя | 2019 |
|
RU2711187C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2409751C2 |
Изобретение относится к области управления сложными объектами техники, работающими в широком диапазоне режимов и нагрузок, контроль которых в процессе работы двигателя осуществляется по нескольким параметрам, и может быть использовано для управления авиационными газотурбинными двигателями (ГТД). Система оснащена третьим элементом сравнения, блоком памяти контрольных точек диагностики, блоком коррекции статических характеристик модели и блоком диагностики, выход блока коррекции статических характеристик модели связан с третьим входом программного блока и первым входом блока диагностики, второй вход которого связан с датчиками, а третий - с блоком памяти контрольных точек диагностики, первый вход третьего элемента сравнения связан с датчиками, второй - со вторым выходом программного блока, а выход - с входом блока коррекции статических характеристик модели и с четвертым входом блока диагностики, выход которого связан с входом блока формирования программ управления. Технический результат изобретения - повышение точности управления ГТД за счет обеспечения контроля точности формирования моделью «виртуальных» измерений, а также за счет обеспечения контроля точности и достоверности фактических измерений в условиях возможных сбоев и отказов датчиков, приводов и элементов агрегатов самого ГТД. 1 ил.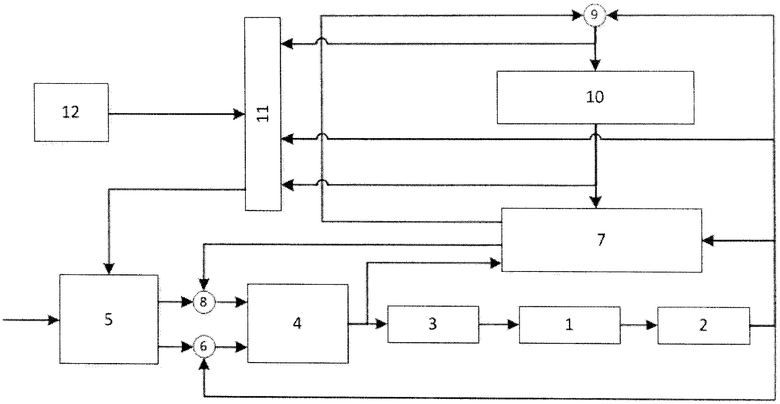
Система управления газотурбинным двигателем, включающая датчики контроля параметров работы двигателя, приводы перемещения исполнительных механизмов агрегатов двигателя, связанные с выходами регуляторов, первый и второй элементы сравнения, первый вход каждого из которых связан с выходом блока формирования программ управления, второй вход первого элемента сравнения связан с датчиками, а второго - с первым выходом программного блока, в который заложена термогазодинамическая модель двигателя, второй вход которого связан с датчиками, выходы элементов сравнения связаны с регуляторами, выход каждого из которых дополнительно связан с первым входом программного блока, отличающаяся тем, что система оснащена третьим элементом сравнения, блоком памяти контрольных точек диагностики, блоком коррекции статических характеристик модели и блоком диагностики, выход блока коррекции статических характеристик модели связан с третьим входом программного блока и первым входом блока диагностики, второй вход которого связан с датчиками, а третий - с блоком памяти контрольных точек диагностики, первый вход третьего элемента сравнения связан с датчиками, второй - со вторым выходом программного блока, а выход - с входом блока коррекции статических характеристик модели и с четвертым входом блока диагностики, выход которого связан с входом блока формирования программ управления.
| A | |||
| KREINER, K | |||
| EIETZAU The use of onboard real-time models for jet engine control, MTU Aero Engines, Germany, 2000 c.2-26 | |||
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2409751C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2006 |
|
RU2319025C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОТКАЗОВ ДАТЧИКОВ И КОНТРОЛЯ ИСПРАВНОСТИ ОБЪЕКТА | 1998 |
|
RU2126903C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2412366C1 |
| US 6568166 B2, 27.05.2003 | |||
| US 5168447 A, 01.12.1992. | |||

