Изобретение относится к области литейного производства (преимущественно), может быть использовано в машиностроении, строительстве.
Известен манипулятор машины для обработки деревьев (патент РФ (11) 2135347, (13) С1, (51) 6 B25J 5/00, B66C 23/687, 23/68 // A01G 23/08, (46) 27.08.99, Бюл. №24), содержащий телескопическую стрелу, установленную на стреле шарнирно-сочлененную ферму из взаимосвязанных двухзвенников, гидроцилиндр перемещения подвижных секций телескопической стрелы, отличающийся тем, что каждый двухзвенник, кроме последнего, снабжен дополнительным звеном, которое установлено параллельно второму звену двухзвенника и соединено с первым поворотным звеном соседнего двухзвенника для образования пантографа. Он может быть применен в лесном хозяйстве для обработки деревьев.
У него недостаточна точность установки рабочего органа, он не имеет всех необходимых и достаточных степеней свободы и не может быть использован для рубки металлов, клепки, трамбовки.
Известно подвесное устройство к прессам для клепки ((11) 812414, (51) М.кл. 3 B21J 15/30, (53) УДК 621.976(088.8), (21) 2755328/25-27, опубликовано 15.03.81, Бюл. №10), содержащее стойку с консолью и подвижную тележку, установленную на консоли и связанную тросом через систему блоков с консолью и противовесом, отличающееся тем, что с целью расширения технологических возможностей за счет обеспечения клепки криволинейных с разным радиусом кривизны замкнутых поверхностей и прямолинейных поверхностей изделий оно снабжено штангой, подвешенной вертикально на тросе с возможностью перемещения в направляющей, выполненной на тележке, а также механизмом для крепления изделия, установленным на конце штанги с возможностью поворота вокруг ее оси, а стойка выполнена поворотной. Источник: 1. Григорьев В.П. и Голдовский П.Б. Клепка на прессах. М.: Оборонгиз, 1950. Это устройство не имеет функции фиксации стойки, тележки и штанги, а также по другим причинам не может быть использовано.
Известен манипулятор для зачистки отливок ((19) SU (11) 1546207 A1 (51) 5 В22D 31/00; (46) 28.02.90, Бюл. №8. (56) Авторское свидетельство СССР №1202703, кл. B22D 31/00, 1983), содержащий шарнирно-рычажный механизм с гидроприводом, поворотную подвеску П-образной формы, закрепленную на руке манипулятора, качающуюся траверсу, размещенную на направляющих для установки рабочего инструмента, и гидродвигатель поворота траверсы, корпус которого закреплен на одной из боковин траверсы, отличающийся тем, что с целью повышения производительности труда за счет упрощения системы перемещением рабочего инструмента с заданным усилием резания манипулятор снабжен ползунами, установленными в направляющих траверсы, дополнительной подвеской, размещенной на руке манипулятора, и двумя колодками с направляющими, установленными на внутренних поверхностях боковин посредством неподвижно закрепленной цапфы с одной стороны и ротора гидродвигателя с другой стороны через соосные отверстия, выполненные в торцах подвесок и колодок, причем ротор гидродвигателя соединен с траверсой посредством разъемного соединения, а ползуны подпружинены относительно колодок в направлении подачи рабочего инструмента. Разъемное соединение ротора с траверсой выполнено шлицевым. Этот манипулятор сложен в изготовлении, т.к. имеет гидропривод и электрооборудование, а оператор, находящийся возле пульта управления, не в состоянии проконтролировать качество ведения процесса рубки.
Прототипом выбрано устройство для обрубки литья (№286155, МПК B22D 31/00, УДК 621.747.06(088.8), опубликовано 10.11.1970, Бюл. №34. Дата опубликования описания 02.03.1971. Кл. 31b2 31/00), содержащее консоль с закрепленным на ней при помощи шарнирно-рычажного механизма пневморубильным молотком и гидравлические исполнительные механизмы, обеспечивающие возвратно-поступательное перемещение рычажного механизма в вертикальной плоскости и его круговое вращение в горизонтальной плоскости, отличающееся тем, что с целью уменьшения усилия резания рычажный механизм закреплен в верхней части консоли с помощью поворотной в горизонтальной плоскости каретки, причем последняя снабжена приводами, один из которых связан с зубилом и обеспечивает его качание в горизонтальной плоскости, а другой перемещает каретку по консоли в горизонтальном направлении возвратно-поступательно. С целью лучшей ориентации зубила относительно обрабатываемой поверхности внутри корпуса молотка установлены поршневые цилиндры, штоки которых закреплены на свободных концах хомута, насаженного на стволе зубила, а на корпусе молотка с помощью кронштейна, связывающего корпус с рычажным механизмом, смонтирован цилиндр.
Недостатками этого устройства являются малая маневренность, затрудненность визуального наблюдения за местом рубки, наличие гидравлической и электрической систем, оно не нашло широкого применения.
Задачами предлагаемого станка являются:
1. Механизировать обрубные, клепальные трамбовочные работы, при этом сохранить маневренность, т.е. возможность вести рубку на криволинейных плоскостях с различными радиусами кривизны и на прямолинейных плоскостях, различно ориентированных в пространстве.
2. Упростить станок, исключить сложную гидроаппаратуру и электроаппаратуру.
3. Облегчить условия труда обрубщика и повысить производительность труда по сравнению с ручной рубкой пневмомолотком, применяемой в основном в настоящее время.
Станок представлен на фиг.1…23, где:
на фиг.1 представлена общая схема станка.
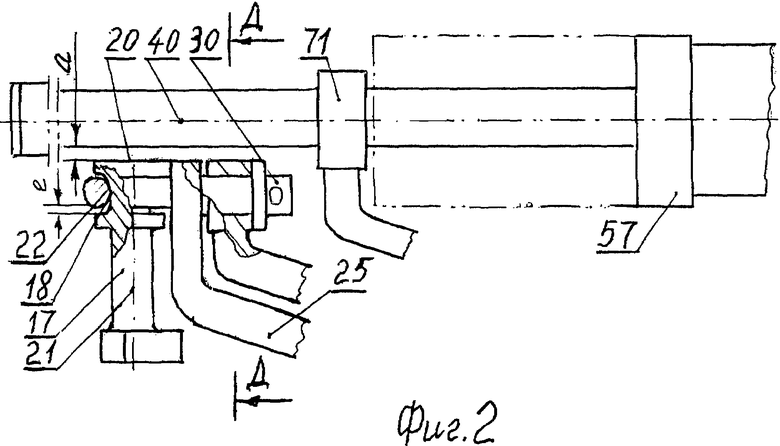
На фиг.2 - вид сверху фиг.3. М 1:2.
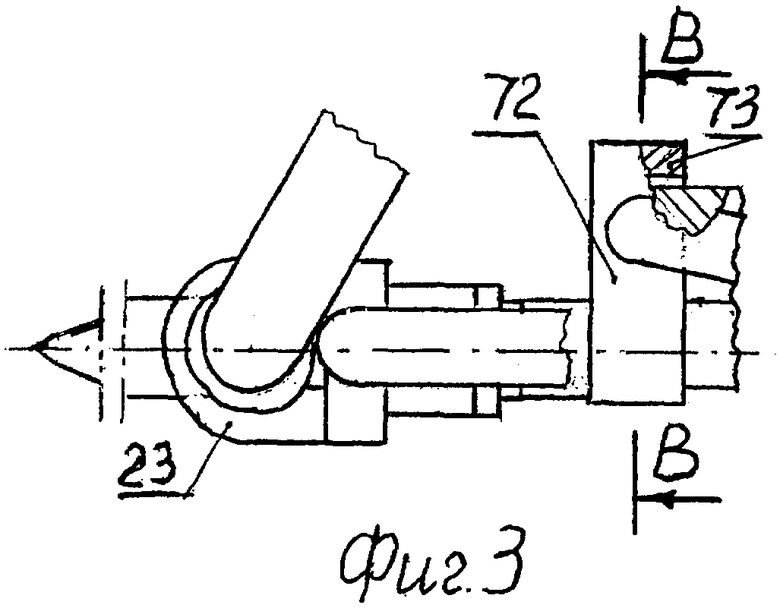
На фиг.3 - вид на шарниры колена. М 1:2.
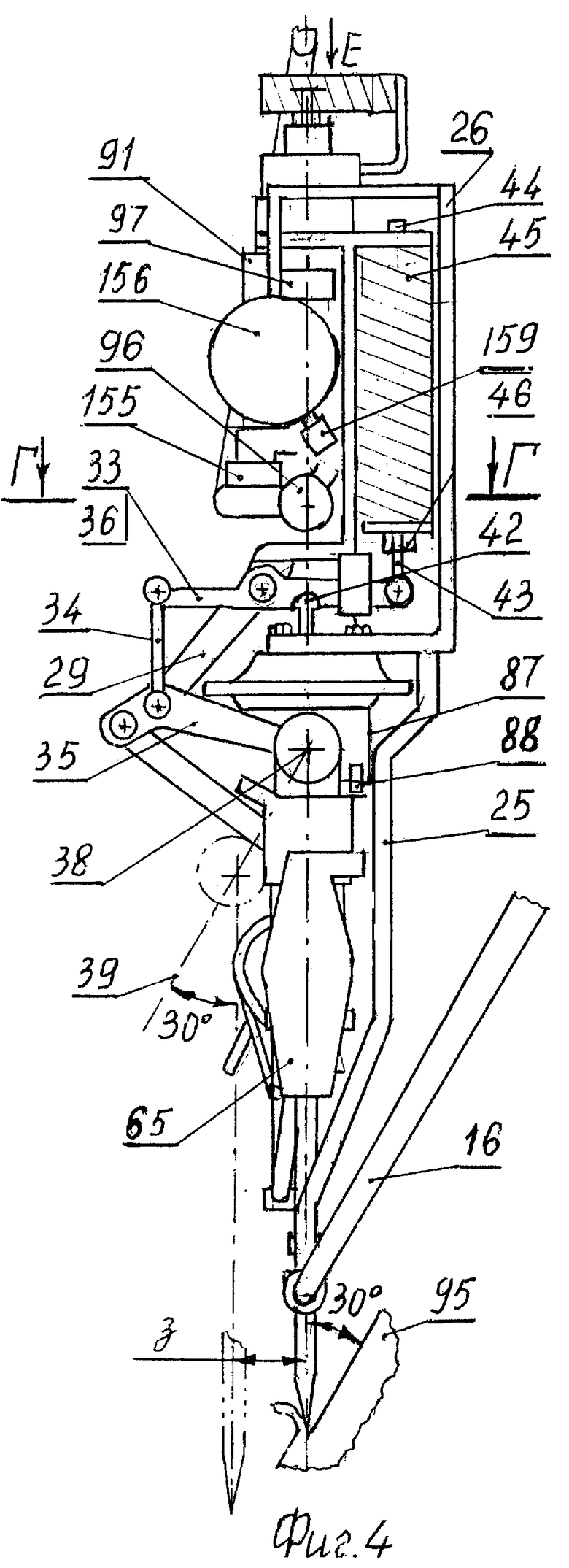
На фиг.4 - обрубная головка в вертикальном положении.
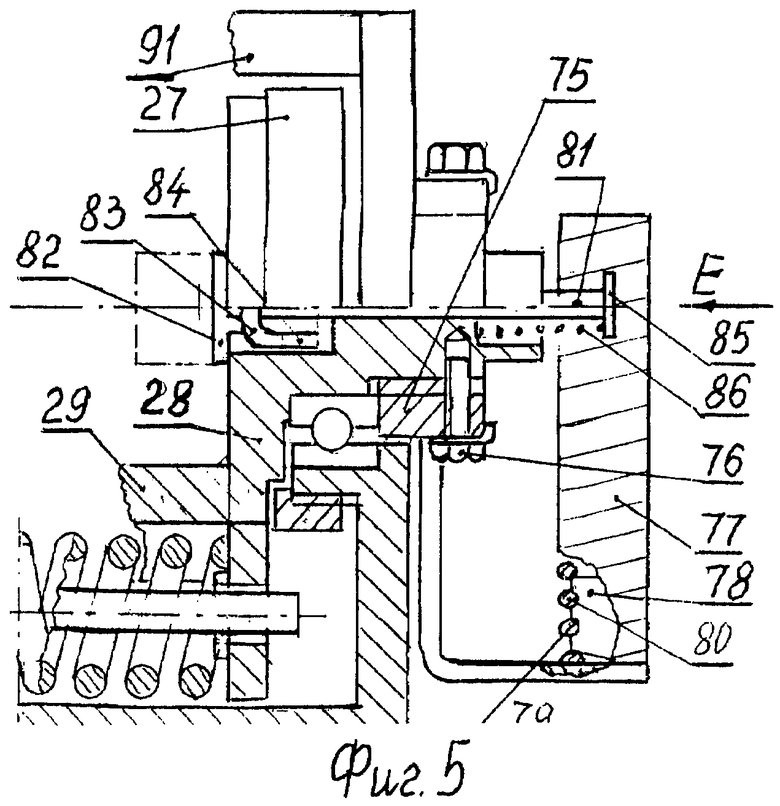
На фиг.5 - шарнир корпуса.
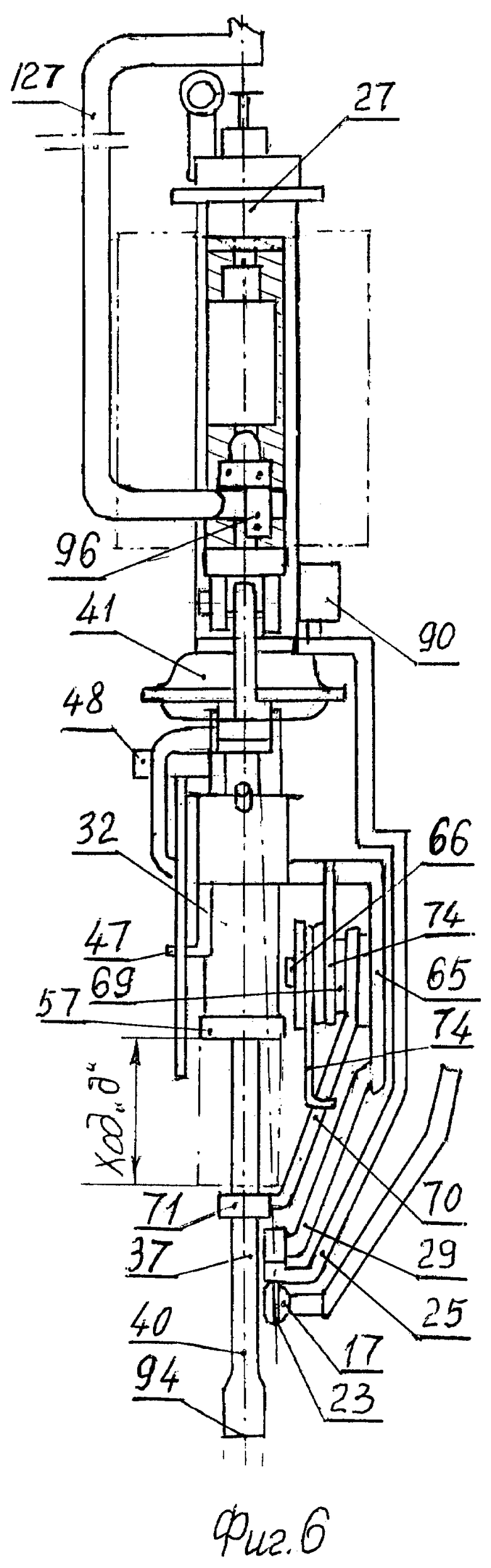
На фиг.6 - вид с боку фиг.4.
На фиг.7 - схема механизма уловителя.
На фиг.8 - общий вид станочного пневмомолотка в сборе с зубилом.
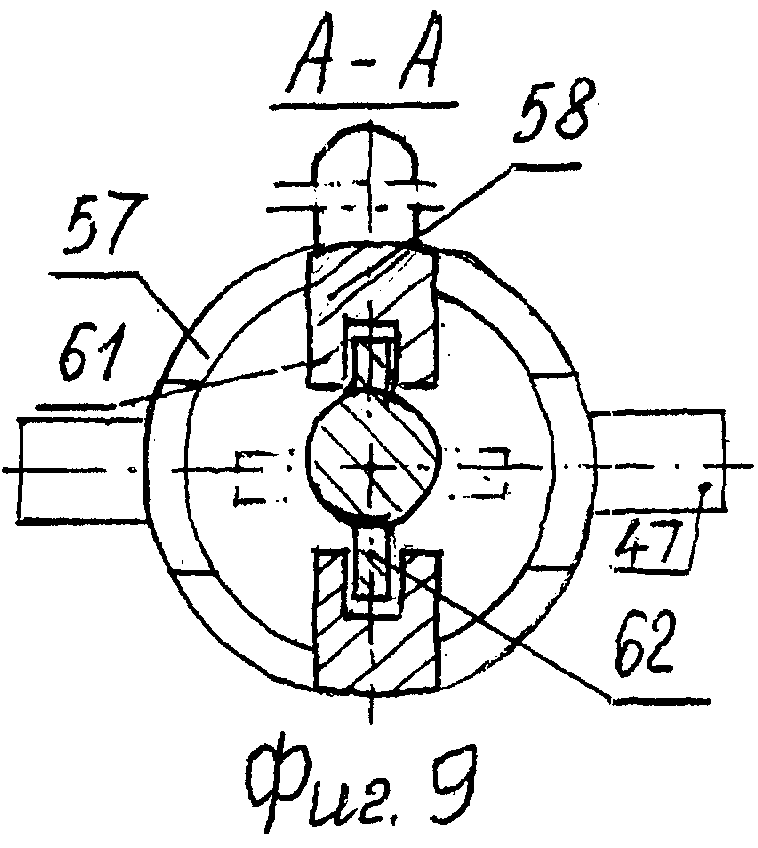
На фиг 9 - разрез А-А фиг.8.
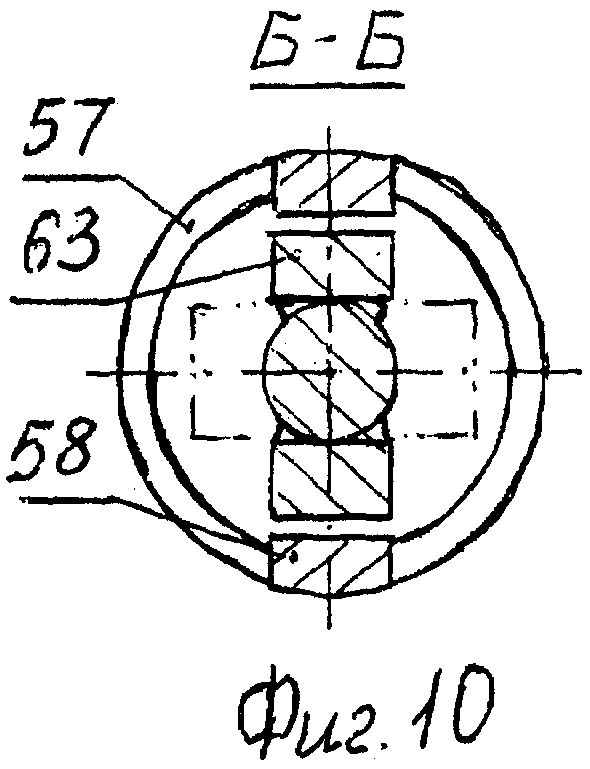
На фиг 10 - сечение Б-Б фиг.8.
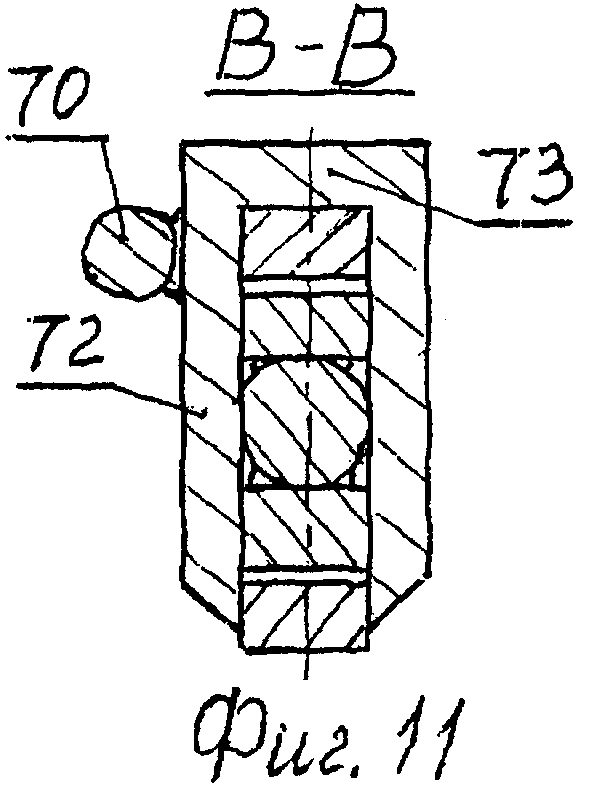
На фиг.11 - разрез В-В фиг.3.
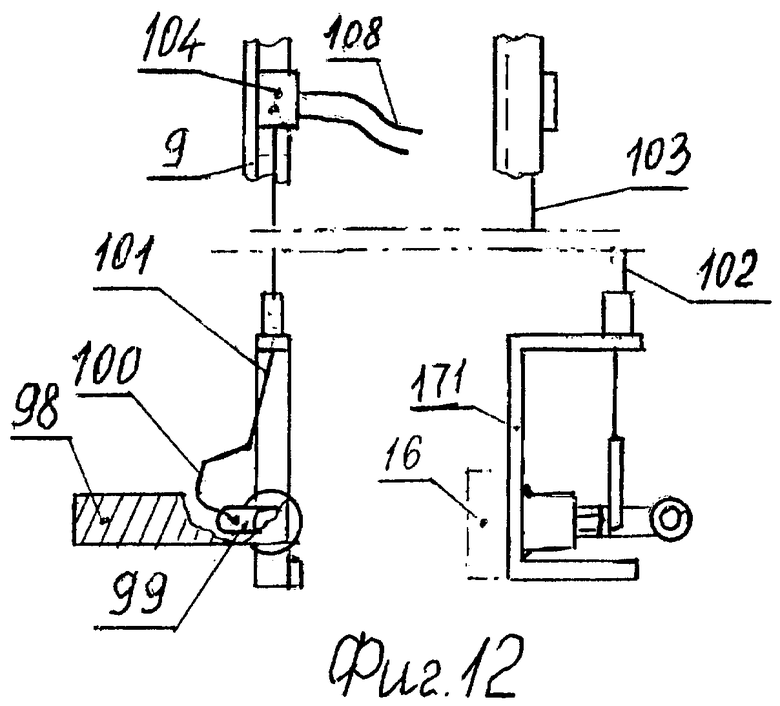
На фиг.12 - рукоятка для левой руки в двух проекциях.
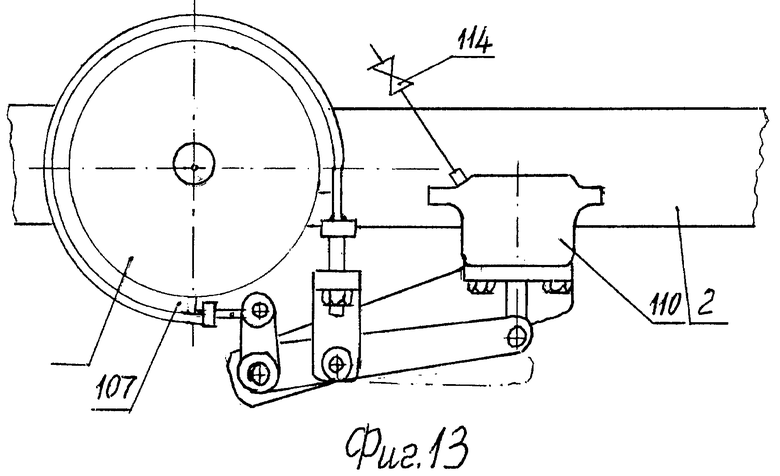
На фиг.13 - вид на ленточный тормоз. М 1:5.
На фиг 14 - схема устройства противовеса с кулачком.
На фиг.15 - схема натяжения рычагом.
На фиг.16 - вариант гибкой связи.
На фиг.17 - схема натяжения рычагом с дугой.
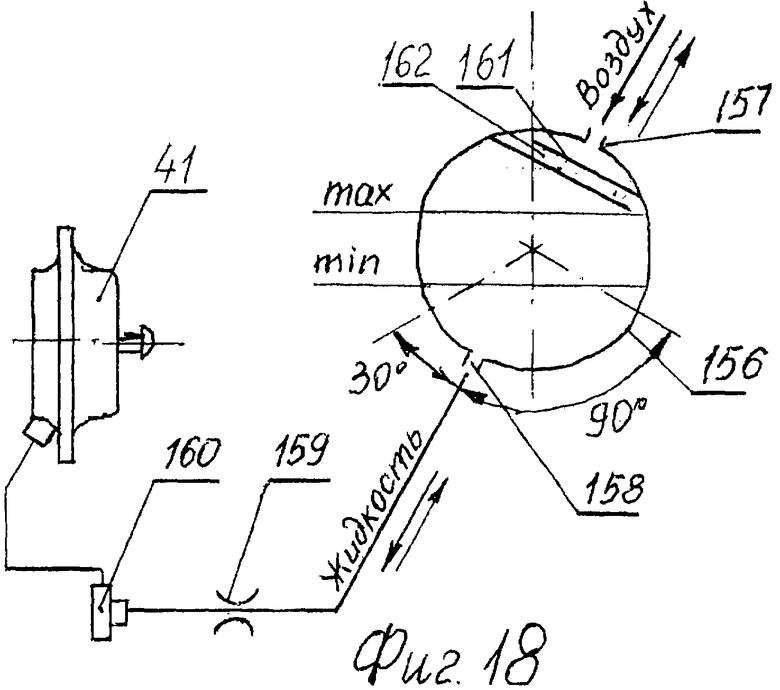
На фиг.18 - гидросхема.
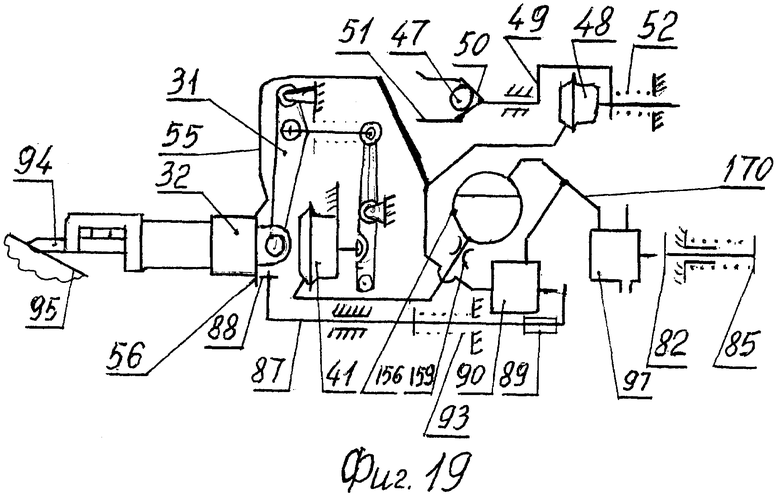
На фиг.19 - пневмогидросхема обрубной головки.
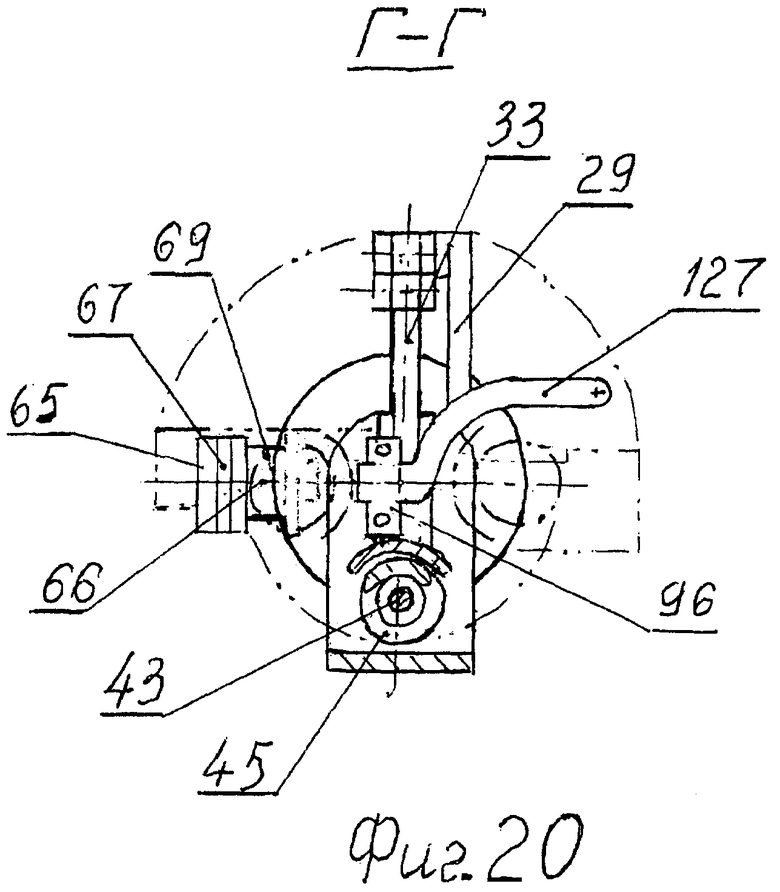
На фиг.20 - разрез Г-Г фиг.4. М 1:5.
На фиг.21 - две рукоятки. Вид Е фиг.5.
На фиг.22 - методика расчета кулачка.
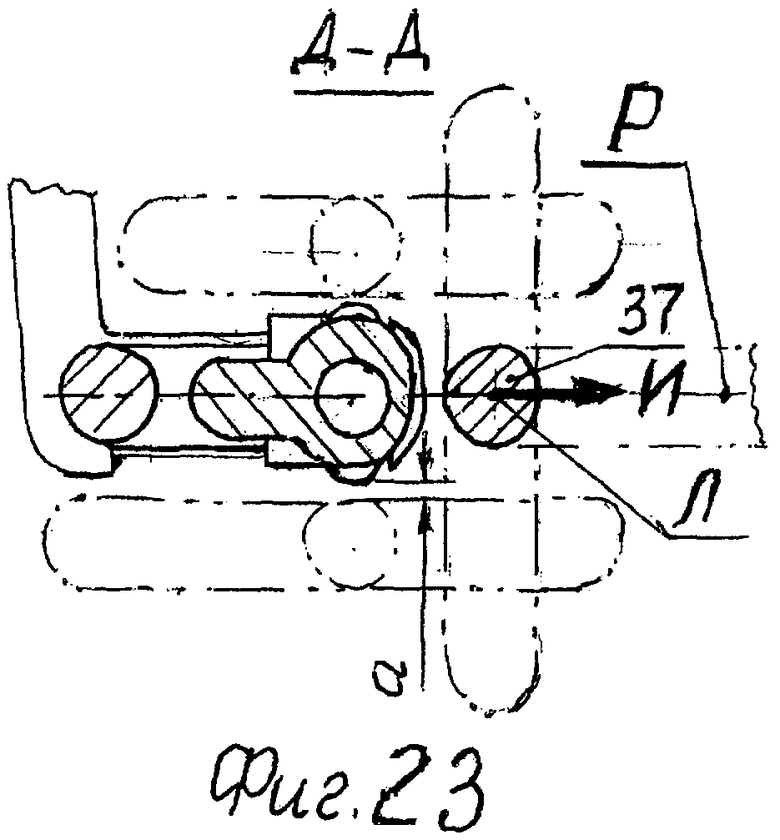
На фиг.23 - разрез Д-Д фиг.2. М 1:2.
Станок для обрубки, клепки, трамбовки состоит из двухсекционной консоли, обрубного устройства с обрубной головкой, механизма удержания обрубного устройства в пространстве во взвешенном состоянии, механизма удержания обрубной головки во взвешенном состоянии, системы фиксации консоли с обрубным устройством и пневмогидросхемы обрубной головки.
Двухсекционная консоль (фиг.1) имеет движение в горизонтальной плоскости с возможностью занимать в ней различные фиксированные положения и состоит из вертикальной колонны 1, первой секции 2, подсоединенной с помощью шарнира 3 к колонне, второй секции 4, шарнирно подсоединенной шарниром 5 к первой секции. К свободному концу 6 секции 4 неподвижно подсоединена каретка 7 с направляющими подшипниками 8, с помощью которых штанга 9 имеет возможность совершать возвратно-поступательные движения вверх и вниз с возможностью занимать различные фиксированные положения относительно каретки, для чего каретка имеет колодочный тормоз 10. К нижнему концу 11 штанги неподвижно подсоединен горизонтальный отвод 12, имеющий шарнир 13 штанги с вертикальной осью 14, к внутреннему кольцу 15 которого жестко подсоединено своим верхним концом колено 16, на противоположном нижнем конце которого имеется палец 17 колена (фиг.2), который на своем противоположном конце имеет кольцевую канавку 18 с цилиндрической шейкой (не показана), и передний торец 20 пальца. Ось 14 отстоит от штанги на расстоянии, обеспечивающем свободное перемещение гибкого рукава и гибкого каната внутри кольца 15, а палец 17 имеет горизонтальную ось 21 пальца.
Палец 17 расположен так, что передняя (левая) образующая цилиндрической шейки 19 пересекается с осью 14 в точке совмещения 22 (фиг.2), а к канавке 18 шарнирно подсоединена своим передним кольцом 23 или скобой (фиг.3) обрубная головка 24 (фиг.1), имеющая корпус 25 (фиг.4), с возможностью поворота корпуса вокруг оси шейки в вертикальной плоскости по часовой стрелке (фиг.4) на угол не менее 120 градусов от вертикали и назад к вертикали. Ширина кольцевой канавки 18 больше толщины кольца 23 на величину зазора «е» (фиг.2), поэтому кольцо 23 с корпусом 25 может занимать положение под прямым или острым углом к оси шейки, а обрубная головка поэтому имеет поворот на угол до 15 градусов в любых других возможных плоскостях, перпендикулярных к упомянутой вертикальной плоскости. Этот поворот на угол до 15 градусов обеспечивает возможность изменить направление обрубки в одном цикле рубки. Кольцо 23 может быть выполнено в виде скобы, как изображено на фиг.2, 3. Таким образом, ось корпуса 25 вместе с обрубной головкой может совершать круговые движения внутри конуса с вершиной в точке совмещения либо с вершиной в других возможных точках на образующих шейки 19.
На противоположном (заднем) конце 26 (фиг.4) корпуса имеется шарнир 27 корпуса, продольная ось которого проходит через точку совмещения, а к внутренней обойме 28 шарнира 27 жестко подсоединена своим задним концом разъемная или цельная балка 29 (фиг.4, 5, 6), которая своим передним концом шарнирно подсоединена к переднему концу корпуса (фиг.2) или к средней части корпуса (не показана) с помощью пальца 30 корпуса (фиг.2), продольная ось которого совмещена с осью шарнира 27 (фиг.6).
К балке 29 шарнирно подсоединен шарнирно-рычажный механизм подачи (передвижения) станочного пневмомолотка 32, состоящий из коромысла 33 (фиг.4), стояка 34, и кривошипа 35, причем сперва коромысло 33 шарнирно, с осью шарнира, перпендикулярной продольной оси пневмомолотка 32, подсоединено своей средней частью к балке 29, а верхний конец 36 коромысла шарнирно соединен со стояком 34, который своим противоположным концом шарнирно и с виброзащитой соединен со средней частью кривошипа 35, шарнирно соединенного своим верхним концом с балкой 29, причем нижний конец кривошипа шарнирно, с виброзащитой соединен с задним торцом станочного пневмомолотка 32. Центр этого шарнира может совершать возвратно-поступательные движения по дуге окружности, а угол между осью корпуса и лучом 39 (фиг.4), соединяющим начальную и конечную точки движения центра 38, составляет 30 градусов. Продольная ось 40 (фиг.2) пневмомолотка в исходном положении находится в одной плоскости с осью 21 пальца 17 и пересекает ось пальца вблизи переднего торца 20 пальца 17 (фиг.2), но между передним торцом и зубилом 37 (фиг.2, 23) имеется зазор «а» (фиг.2, 3) величиной, не меньшей, чем радиальное перемещение зубила во время процесса рубки, чтобы предотвратить передачу вибрации зубила на палец и далее на всю конструкцию. Такой же зазор имеется между зубилом и скобой 23. Виброзащита шарниров состоит из эластичной втулки, плотно одетой на ось шарнира, и двух колец, выполненных из эластичного материала, помещенных между внутренней и наружными цапфами шарнира. К корпусу 25 неподвижно подсоединена гидрокамера 41 или пневмокамера (фиг.4), шток которой имеет ось, совмещенную с продольной осью пневмомолотка в исходном положении, а на своем конце шток имеет полусферическую пяту 42 (фиг.4), подвижно соединенную с нижней частью коромысла 33, причем нижний конец коромысла шарнирно подсоединен к сердечнику 43 (фиг.4), противоположный конец 44 которого свободно продет в отверстие, имеющееся в заднем конце балки 29. Сердечник имеет натяжную гайку 46, и на сердечник свободно надета пружина сжатия 45, воздействующая одним своим концом с силой на натяжную гайку, навинченную на сердечник, а другим концом с силой на задний конец балки 29. Таким образом пружина возврата 45 возвращает механизм подачи 31 пмевмомолотка 32 вместе с пневмомолотком в исходное положение после окончания цикла рубки. В случае применения пневмокамеры возможны «выстрелы», то есть повышенная скорость передвижения пневмомолотка, поэтому на балке неподвижно подсоединены демпфирующие элементы, предотвращающие удары (не показаны).
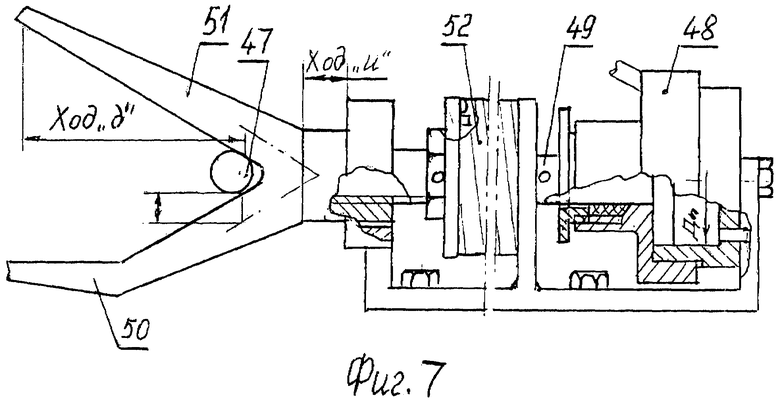
Станочный пневмомолоток имеет один или два пальца 47 (фиг.8, 9) молотка, на которые могут быть одеты ролики с возможностью вращения (не показаны), а к балке неподвижно подсоединена пневмокамера 48 уловителя (фиг.6, 7) или пневмоцилиндр с одной рабочей полостью, причем шток пневмокамеры неподвижно соединен с тягой 49, на противоположном конце которой имеется уловитель с двумя кулачками 50 и 51, ограничивающими перемещение пневмомолотка вокруг оси 38 в необходимых пределах, причем оба кулачка соединены между собой так, что контактирующий с ними палец или ролик оказывается в одной и той же точке при возвращении пневмомолотка в исходное (заднее) положение. После начала рубки в пневмоцилиндр 48 поступает сжатый воздух, и кулачки отодвигаются на величину хода поршня или штока пневмокамеры и дают возможность пальцу выйти из сцепления с кулачками, то есть пневмомолоток может занимать такое положение, которое необходимо для ведения процесса обрубки. Механизм улавливания имеет пружину 52 возврата уловителя в исходное положение. Оси пальцев 47 направлены горизонтально.
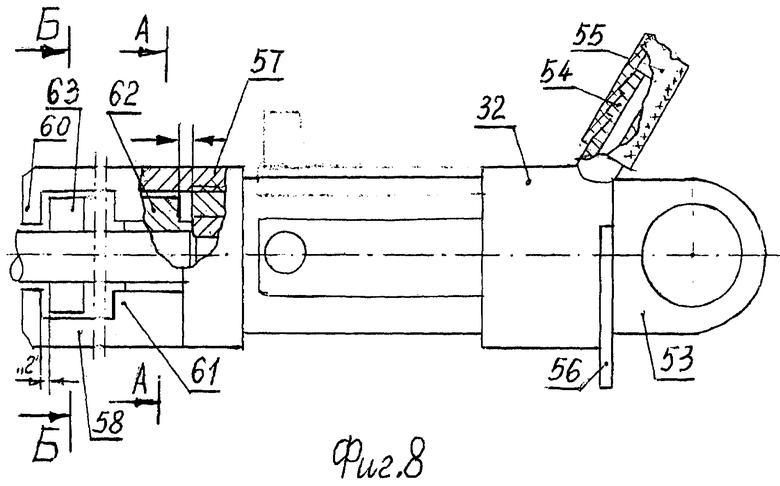
Станочный пневмомолоток имеет с заднего торца цапфу 53 (фиг.8) шарнира молотка, а также ершик 54 для подсоединения гибкого рукава 55 (фиг.9), и молоток может иметь площадку в виде полукольца 56 для увеличения площади торцевой поверхности пневмомолотка. Пневмомолоток имеет на переднем конце ствола резьбу, как изображено на фиг.8, или пазы (не показаны), с помощью которых к пневмомолотку подсоединена быстросъемно втулка 57 (фиг.8, 9, 10) с внутренней резьбой или зубьями втулки, причем втулка имеет одно или два правúла 58 зубила 37, направленных вдоль оси пневмомолотка и имеющих на своем конце с внутренней стороны каждое один или два крючка 60 (фиг.8), а также каждое правúло имеет с внутренней стороны два боковых поворотника 61 (фиг.8, 9), между которыми может помещаться со скольжением стабилизатор 62 (фиг.8) зубила. Станочный пневмомолоток имеет зубило с одной или двумя бобышками 63 (фиг.8, 10) на одном боку зубила, неразъемно соединенными с зубилом. Стабилизатор также неразъемно соединен с зубилом. Зубило имеет продольное перемещение в пределах зазора «г» (фиг.8), имеющегося между зубом и бобышкой, причем габаритная ширина правúл 58, поворотников и бобышек равна диаметру зубила, с зазором.
К балке 29 неподвижно подсоединена вертикальная площадка 65 (фиг.4, 6), параллельная продольной оси пневмомолотка 32 и расположенная сбоку от пневмомолотка, перпендикулярно которой неподвижно подсоединена ось 66 площадки (фиг.6), на которую плотно насажена демпфирующая втулка 67, а на втулку свободно насажена втулка 69 прижима, имеющая поворот вокруг оси 66 и ограниченная в перемещении вдоль этой оси, причем ко втулке жестко подсоединен одним своим концом кронштейн 70 (фиг.6, 11), имеющий на противоположном своем конце скобу 71 (фиг.2), которая имеет две щеки 72 (фиг.3, 11) с перемычкой 73, а скоба надета сверху на направляющую 58 с возможностью продольного перемещения направляющей между щек скобы.
На втулку 69 свободно надета спиральная пружина 74 (фиг.6), один конец которой зафиксирован на балке, а другой конец пружины нажимает с силой на кронштейн 70 сверху, и таким образом предотвращен несанкционированный съем скобы 71 с направляющей 58 и предотвращено отклонение зубила в направлении вдоль режущей кромки зубила, то есть перпендикулярно плоскости площадки 65 во время рубки.
Внутренняя обойма 28 шарнира корпуса ограничена в своем перемещении в продольном направлении гайкой 75 (фиг.5), застопоренной от отвинчивания стопорными болтами 76, а к гайке 75 неподвижно подсоединена посредством кронштейна одна, или две, или три виброзащищенные рукоятки 77 (для удобства в работе при повороте пневмомолотка на 180 градусов) для правой руки оператора. Сама рукоятка состоит из цилиндрического стержня 78 (фиг.5), имеющего на наружной своей поверхности 2…4 витка спиральной канавки 79 с шагом, равным шагу навивки пружины 80, а пружина навинчена одним своим концом на стержень 78, причем конец пружинной проволоки неподвижно соединен со стержнем 78 сваркой, или пайкой, или изгибом конца проволоки пружины. За противоположный конец пружины оператор держится рукой и управляет обрубной головкой. Наружный диаметр пружины 80 и длина ее свободного конца соответствуют средним размерам кисти человека.
Внутренняя обойма 28 имеет в своем центре шток 81 (фиг.5), имеющий свободное перемещение вдоль оси балки 29 и имеющий на одном своем конце регулятор 82 своей длины, навинченный на шток 81 и зафиксированный от отвинчивания штифтом 83, а на противоположном своем конце шток имеет гашетку 85 в виде фланца, на которую оператор может нажимать (утапливать), а пружина 86 воздействует на гашетку с силой и может возвращать шток в исходное положение.
Балка 29 имеет возможность поворота вокруг своей продольной оси на угол не менее плюс-минус 90 градусов от исходного положения, при котором режущая кромка зубила горизонтальна.
К корпусу 25 или к балке 29 подвижно подсоединен управляющий стержень 87 (фиг.4), имеющий продольное возвратно-поступательное движение параллельно продольной оси пневмомолотка 32, на одном конце которого имеется ролик 88 с осью вращения, перпендикулярной продольной оси пневмомолотка, контактирующий с задним торцом пневмомолотка или площадкой 56, а противоположный конец стержня 87 имеет регулятор длины стержня (не показан), причем этот противоположный конец управляющего стержня контактирует с отсекателем 90 (фиг.6) сжатого воздуха, который неподвижно подсоединен к корпусу 25 или к балке 29 соответственно. Управляющий стержень имеет пружину 93 возврата управляющего стержня (не показана), которая воздействует на стержень с силой одним своим концом, а другим концом воздействует с силой на корпус 25 или балку 29. На ролик 88 воздействует своим задним торцом пневмомолоток 32 при приближении пневмомолотка к исходному положению после рубки, тогда управляющий стержень 87 перемещается и воздействует на золотник отсекателя 90 сжатого воздуха и перекрывает подачу сжатого воздуха в пневмомолоток и в пневмокамеру 48. Отсекатель 90 пускает сжатый воздух в момент, когда осуществилось небольшое перемещение пневмомолотка вперед, выбраны все зазоры в механизме и осуществлено нажатие лезвия зубила 94 (фиг.6) на обрабатываемую поверхность 95 (фиг.4). Положение пуска устанавливают заранее регулятором длины 89.
К корпусу 25 неподвижно подсоединена наружная втулка центрального воздухоподводящего шарнира 96 (фиг.4), продольная ось которого расположена в центре тяжести обрубной головки или возможно ближе к нему (тогда обрубная головка уравновешивается уравновешивающей массой, не показана). Внутренняя обойма этого шарнира соединена трубопроводом с входным отверстием пускателя 97 сжатого воздуха, установленного на панели 91, а ось вращения шарнира 96 перпендикулярна оси 30 пневмомолотка. Шарнир 96 предотвращает перекручивание гибкого рукава.
К колену 16 шарнирно подсоединена виброзащищенная рукоятка 98 для левой руки оператора (фиг.12), жестко соединенная с рычагом 99 рукоятки и имеющая поворот на неполный угол не менее 90 градусов, к которому шарнирно подсоединена одним своим концом скоба 100, к противоположному концу которой подсоединен металлический гибкий тонкий канатик 101, помещенный внутрь гибкой металлической трубки 102, выполненной в виде проволоки круглого сечения, свитой спиралью, с витками, соприкасающимися друг с другом, причем один конец трубки 102 неподвижно подсоединен к колену 16, а противоположный конец трубки соединен неподвижно с верхней частью штанги 9, где неподвижно подсоединен двухпозиционный распределитель 104 сжатого воздуха (фиг.1) Второй конец 103 гибкого канатика 101 может воздействовать на золотник распределителя 104, который впускает и выпускает сжатый воздух, подаваемый из сети при повороте рукоятки 98. Гибкая трубка 103 имеет запас длины, позволяющий беспрепятственно вращать колено16 на угол не менее 180 градусов в оба направления и помещать обрубную головку в вертикальное положение.
К внутренней обойме 15 шарнира штанги, к нижнему ее концу, подсоединен блок 105 (фиг.1) колена с осью вращения, параллельной оси 21 пальца колена, имеющий широкий ручей, в котором может расположиться и двигаться гибкий рукав 106 (фиг.16) вместе с гибкой связью 126 или 166 (фиг.1, 16). Рукав 106 со связью может свободно передвигаться вверх и вниз внутри кольца 15 и не соприкасается при своем движении со штангой, кареткой и колодочным тормозом.
Консоль способна занимать различные фиксированные положения в горизонтальной плоскости и имеет для фиксации пневмосистему фиксации консоли с обрубным устройством, имеющую два ленточных тормоза 107 (фиг.1, 13), установленных в шарнирах поворотной консоли, и пневмосистему, состоящую из гибких рукавов 108 (фиг.1), трех воздухоподводящих шарниров 109, расположенных в осях вращения шарниров консоли, двух пневмокамер 110, являющихся приводами к ленточным тормозам, одной пневмокамеры 111, являющейся приводом для колодочного тормоза 10, и трех воздушных кранов 114, установленных перед каждой пневмокамерой.
Каретка 7 имеет колодочный тормоз 10 (фиг.1), который состоит из двух тормозных колодок 115, расположенных с противоположных боковых поверхностей штанги 9 и имеющих ограниченное движение в направлении, перпендикулярном боковой поверхности штанги, и состоит из скобы 116 тормоза, к одному концу которой неподвижно подсоединена пневмокамера 111, к штоку которой жестко подсоединена одна из колодок, а к противоположному концу скобы неподвижно подсоединена другая колодка, причем обе колодки ограничены в своем перемещении вверх и вниз.
Станок имеет механизм удержания обрубного устройства во взвешенном состоянии, состоящий из гибкого каната 117 (фиг.1), подсоединенного одним концом к нижней части штанги 9, канат огибает блочок 118, установленный на конце второй секции 4 рядом со штангой, блочка 119, установленного на второй секции и имеющего ручей, совпадающий с осью вращения второго шарнира консоли, блочка 120, установленного на первой секции консоли с ручьем, совпадающим с осью вращения шарнира 5 консоли, и установленного выше или ниже блочка 119, блочка 121, установленного в начале первой секции 2 консоли возле колонны, а противоположный конец каната 117 подсоединен к контргрузу 122 (фиг.1, 14, 15), имеющему вес, равный сумме весов деталей и узлов, двигающихся вместе со штангой.
К первой секции поз. 2 консоли, возле колонны 1, неподвижно подсоединена вертикальная направляющая 123 (фиг.15), вдоль которой может совершать возвратно-поступательные движения вверх и вниз каретка 124, являющаяся частью контргруза 122. Таким образом, при подъеме штанги на какую-либо высоту контргруз 122 опускается на такое же расстояние, и достигается взвешенное состояние штанги.
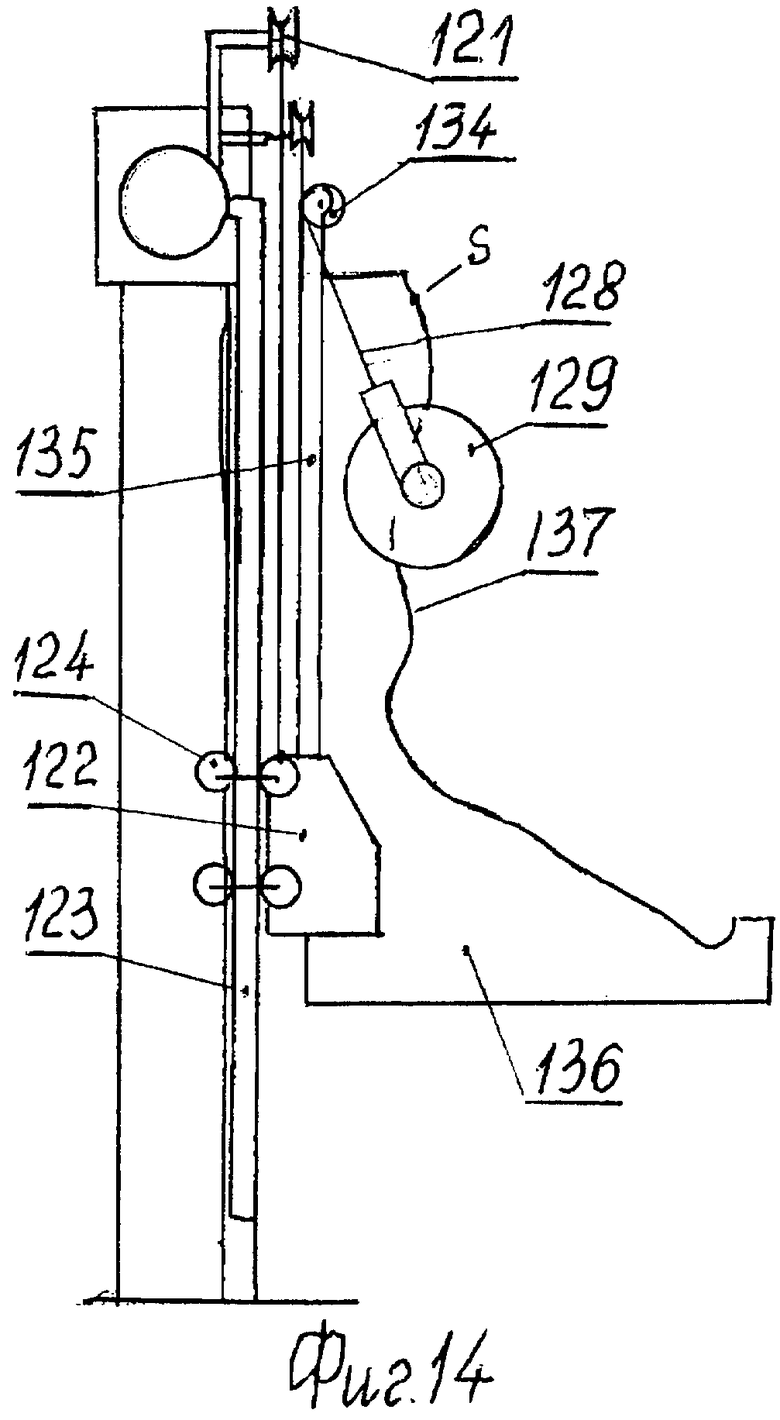
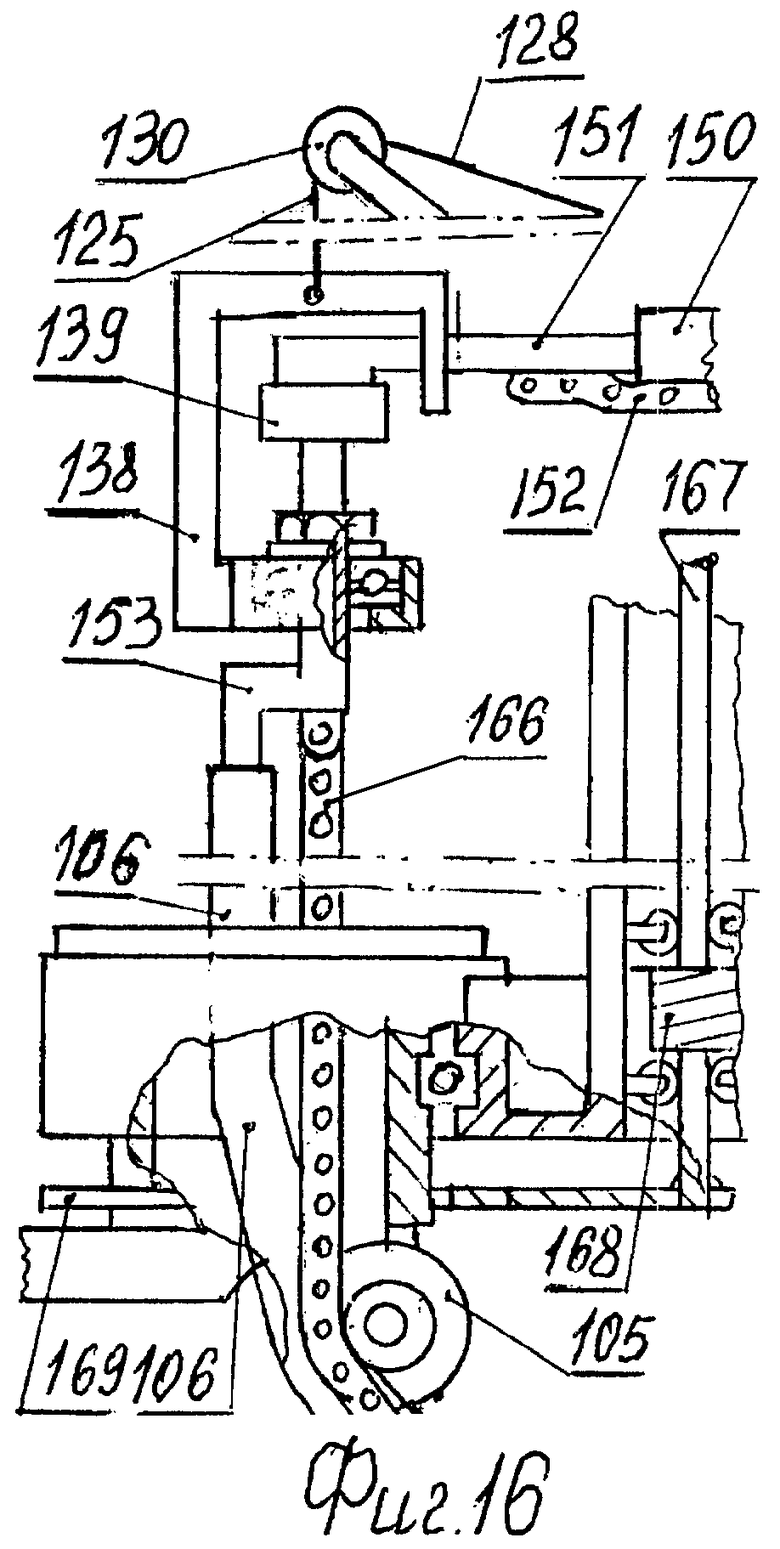
Станок имеет механизм удержания обрубной головки во взвешенном состоянии, имеющий гибкую связь 125 (фиг.1) головки, к нижней части 126 которой подсоединена верхним концом П-образная скоба 127 (фиг.1, 6, 20), выполненная в виде жесткой трубы, а на нижний горизонтальный конец скобы 127 плотно насажен своим внутренним кольцом воздухоподводящий центральный шарнир 96 (фиг.4), который своим наружным кольцом неподвижно подсоединен к корпусу 25 обрубной головки. Таким образом осуществлено шарнирное соединение П-образной скобы с обрубной головкой и одновременно осуществлен подвод сжатого воздуха к обрубной головке. К противоположному концу 128 (фиг.14, 15) гибкой связи 125 подсоединен противовес 129 головки, а между двумя концами гибкой связи 126 и 128 имеется система блочков, в которую входят: блок 105 колена, блок 130, установленный на верхнем конце штанги 9, блоки 131 и 132, установленные над шарниром 5, блок 133, установленный на первой секции 2 возле колонны 1 над кареткой 124, поддерживающий блок 134 (фиг.14, 15), установленный вверху вертикальной стойки 135, которая неподвижно подсоединена к основанию 136, причем основание неподвижно соединено с кареткой 124. На фиг.16 нижняя часть 126 гибкой связи выполнена в виде втулочно-роликовой цепи 166, но может быть выполнена в виде металлического каната, способного изгибаться в вертикальной плоскости на блочке 105, одновременно воспринимать крутящий момент от сил трения в подвесном шарнире 139. Часть 126 гибкой связи может быть выполнена также в виде гибкого рукава высокого давления, стенки которого армированы стальной оплеткой, внутри которого может протекать сжатый воздух, или в виде стального гибкого каната, помещенного внутри гибкого рукава. Участки 125, 126, 128 могут быть выполнены также в виде единого стального каната, одним концом подсоединенного к верху П-образной скобы, а противоположным концом подсоединенного к противовесу 129 или рычагу 141.
Противовес 129 головки может совершать возвратно-поступательные движения вверх и вниз в вертикальной плоскости по наклонному в вертикальной плоскости кулачку 137 (фиг.14), неподвижно соединенному с основанием 136, имеющим вертикальную стойку 135 с поддерживающим блочком 134. Расчет кулачка приведен ниже. Кулачок 137 рассчитан таким образом, что при подъеме центра тяжести обрубной головки на любую возможную высоту центр тяжести противовеса головки опускается на такое же расстояние.
На фиг.16 гибкая связь 125 подсоединена к веху скобы 138, которая имеет воздухоподводящий подвесной шарнир 139, шарнирно подсоединенный к скобе 138, а к внутреннему кольцу шарнира 139 снизу муфты подсоединен одним концом гибкий рукав 106, подсоединенный своим нижним концом к верхнему концу П-образной скобы. К наружному кольцу шарнира 139 подсоединена жесткая труба 151, подсоединенная своим противоположным концом к гибкому рукаву 150 воздушной магистрали.
Зев скобы 127 имеет форму и размеры, позволяющие разместить в зеве детали обрубной головки, поворачиваемые вместе с корпусом 25 и рукояткой 77 и кистью оператора на угол не менее 120 градусов по часовой стрелке от вертикального положения продольной оси головки. Кроме того, в зеве могут разместиться детали, поворачиваемые вместе с балкой 29 на угол не менее 90 градусов в оба направления.
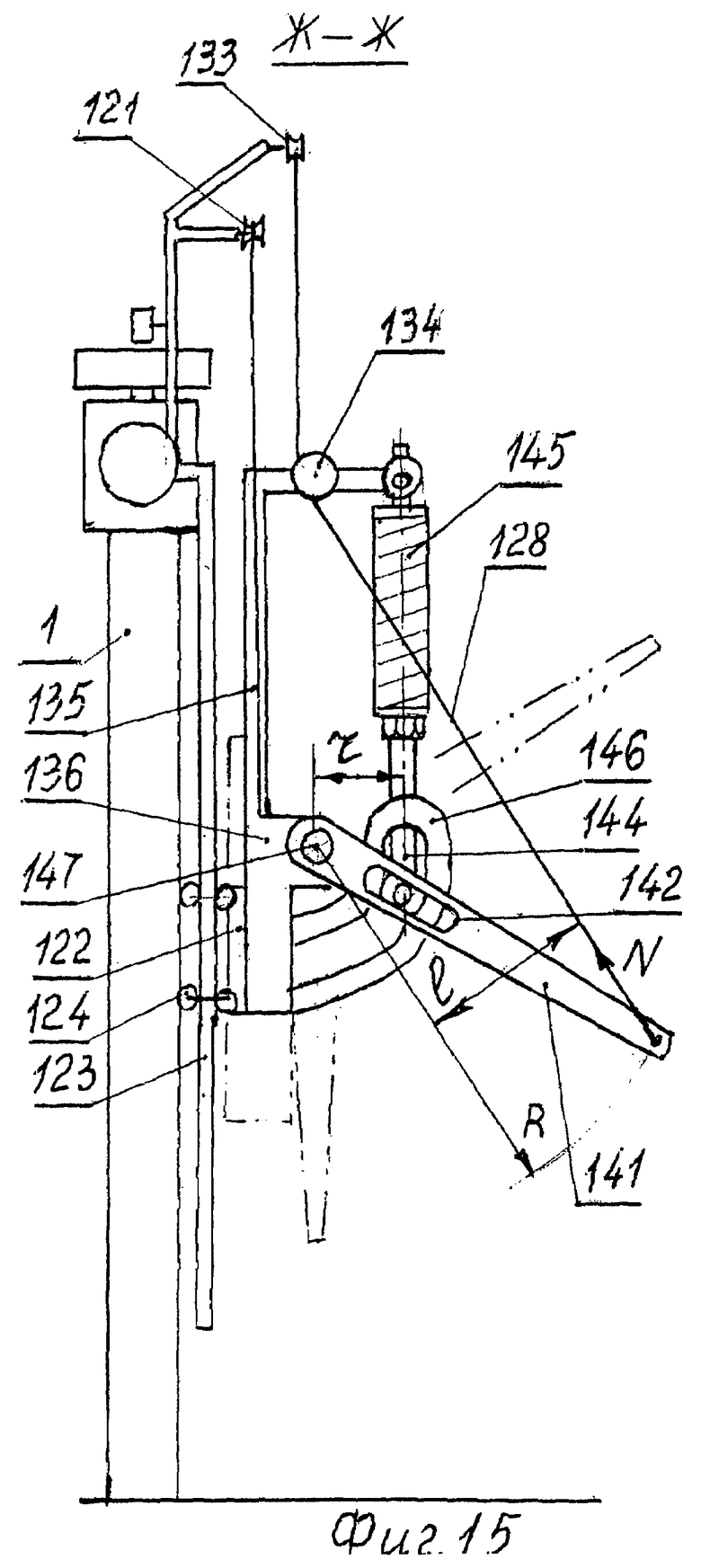
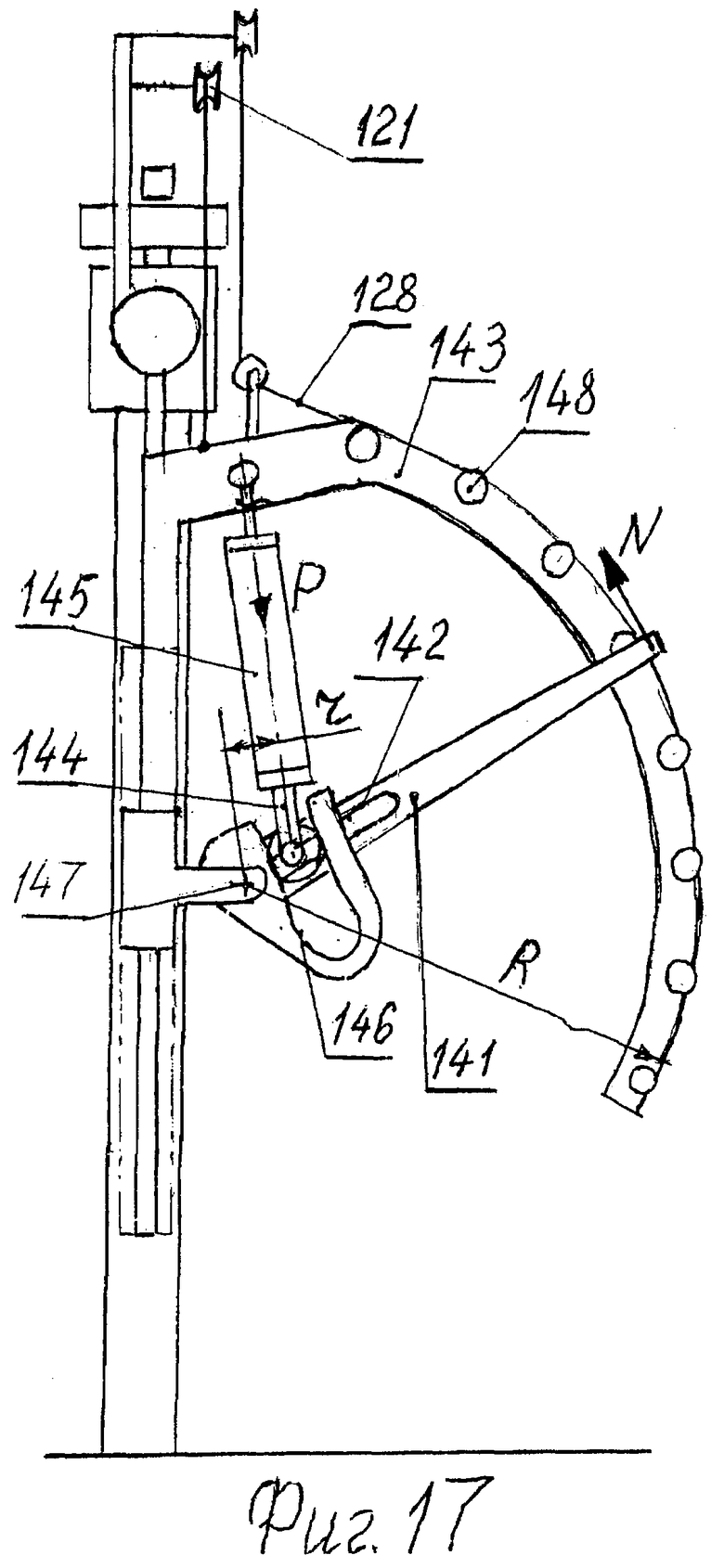
По второму варианту механизма удержания обрубной головки во взвешенном состоянии к основанию 136 (фиг.15) шарнирно подсоединен одним концом рычаг 141 (фиг.15, 17), имеющий продольный паз 142, а к противоположному концу рычага подсоединен второй конец 128 гибкой связи 125, причем к концу рычага 141 либо к стойке 135 (фиг.17) может быть неподвижно подсоединена дуга 143 с радиусом, которая может иметь ролики, по которым может передвигаться конец связи 128. Рычаг в пазу подвижно соединен с передним концом толкателя 144 (фиг.15), имеющего цилиндрическую пружину 145 сжатия, шарнирно подсоединенную своим задним концом к основанию 135, и давит на шарнир с силой, а передним концом пружина давит с силой на передний конец толкателя 144, который в пазу в контакте с кулачком рычага 146 (фиг 17), неподвижно соединенным с основанием 136, и может создавать крутящий момент вокруг оси 147 рычага такой переменной величины, при которой сила натяжения N (фиг.15) конца 128 равна по величине силе натяжения конца 126 связи. Таким образом достигнуто взвешенное состояние обрубной головки. На фиг.17 изображен вариант, где дуга 143 подсоединена к вертикальной стойке 135 и имеет ролики 148, по которым перемещается канат 128.
Основание 136 с кулачком 137 и противовесом 129, а также основание с рычагом 141 могут быть неподвижно подсоединены (с целью, например, уменьшения занимаемой производственной площади) также к верхнему концу штанги 9 на некотором расстоянии от штанги по горизонтали, позволяющем поместиться оператору. Основание с рычагом 141 может быть подсоединено к штанге в двух вариантах: когда рычаг совершает вращение в вертикальной плоскости и когда рычаг совершает вращение в горизонтальной плоскости. На чертежах эти варианты не показаны.
Пневмогидросхема обрубной головки имеет воздухоподводящую магистраль и пневмогидроаппаратуру обрубной головки, последовательно соединенные друг с другом. Воздухоподводящая магистраль обрубной головки состоит из тройника 149 (фиг.1), соединенного с пневмомагистралью консоли, гибкого воздуховода 150 (фиг.16), соединенного с наружной обоймой муфты 139 посредством жесткой трубы 151, изогнутой коленом так, что она не касается каретки 7 и тормоза 10 при своем движении вверх и вниз, либо рядом с гибким воздуховодом 150 проложена втулочно-роликовая цепь 152, имеющая прогиб только в вертикальной плоскости. К внутренней обойме шарнира 139 подсоединена жесткая труба 153 (фиг.16), к которой подсоединен гибкий рукав 106, подсоединенный к верхнему концу П-образной скобы 127, выполненной в виде жесткой трубы, на нижний конец которой плотно одета внутренняя обойма центрального воздухоподводящего шарнира 96. Воздухоподводящая магистраль обрубной головки может быть также выполнена в виде единого гибкого рукава 150, одним концом подсоединенного к тройнику 149, а вторым концом подсоединенного к верху П-образной скобы, а средняя часть помещена в широкий ручей блочка 130, по которому проложена также гибкая связь 125 (не показана), причем гибкий рукав 150 и гибкая связь перемещаются в широком ручье совместно (одновременно).
Пневмогидроаппаратура обрубной головки устроена следующим образом. К корпусу 25, на его заднем конце, неподвижно подсоединена панель 91 (фиг.4), а к ней неподвижно подсоединены: пускатель сжатого воздуха 97 (фиг.18, 19), срабатывающий при нажатии оператором на гашетку 85, отсекатель 90 сжатого воздуха, срабатывающий при нажатии оператором на гашетку 85 или срабатывающий при нажатии на отсекатель регулятором длины 89, управляющий стержень 87, воздухоподводящий шарнир 155 (фиг.4), имеющий ось вращения, параллельную оси вращения балки 29, причем муфта 155 подает сжатый воздух в пневморубильный молоток 32 и впневмокамеру 48 уловителя во время процесса рубки, и неподвижно подсоединенный к панели гидробак 156 (фиг.4, 18), имеющий верхнее отверстие 157 для поступления сжатого воздуха и нижнее отверстие для протекания жидкости. К нижнему отверстию подсоединен дроссель 159 для регулировки скорости холостого хода пневмомолотка. Гидробак может быть подсоединен непосредственно к вертикальному участку П-образной скобы 127, тогда между дросселем и гидрокамерой устанавливают дополнительно гидропроводящий шарнир 160 (фиг.18).
Внутри гидробака имеется отражатель 161 (фиг.18) фонтана жидкости с лабиринтом 162, предотвращающие попадание жидкости (утечку) в верхнее отверстие, а гидробак и другая аппаратура, закрепленная на панели, расположены так, что они не цепляются за движущиеся детали обрубной головки. С целью исключения из конструкции стержня 87 и ролика 88 отсекатель 90 может быть закреплен на пневмопанели 91 с возможностью воздействовать на его золотник непосредственно регулятором 82 длины штока 81, получающим свое движение от руки оператора.
Подвод сжатого воздуха к каждой пневмокамере 110, 111 в отдельности может быть перекрыт кранами (не показаны) с целью возможности вести обработку в частных случаях. Например, если перекрыть краны 114, то есть оставить ленточные тормоза 107 расфиксированными, то можно вести клепку или трамбование на горизонтальной плоскости. Если перекрыть кран 163, пневмокамера 111 не сработает, тогда можно вести обработку на вертикальной плоскости.
Вместо шарнира 96 на нижний горизонтальный конец П-образной скобы 127 может быть свободно насажено полое кольцо 164 с двумя ершиками, расположенными под углом 60 градусов относительно друг друга (не показаны), с помощью которых осуществлен подвод и отвод сжатого воздуха.
Для замены зубила 94, которое имеет ширину лезвия, меньшую внутреннего диаметра резьбы во втулке 57, поднимают скобу 71, свинчивают или снимают втулку 57, извлекают одно зубило, вставляют другое зубило или клепальную обжимку или трамбовку в правúло (в правúла) 58, вставляют хвостовик съемного инструмента в пневмомолоток 32, навинчивают втулку 57 вместе с новым инструментом, опускают скобу 71 на одно или два правúла 58.
По другому варианту управление двухпозиционным распределителем 104 может быть осуществлено посредством стержня 167 управления (фиг.16), подвижно вверх и вниз подсоединенного к штанге 9, имеющего пружину 168 возврата и воздействующего на золотник распределителя 104, а стержень своим нижним концом неподвижно соединен с плоским горизонтальным кольцом 169, имеющим ось, совмещенную с осью 14 шарнира штанги, а кольцо 169 свободно надето на внутреннюю обойму 15 с возможностью вертикального возвратно-поступательного движения, причем плоское кольцо 169 получает движение от рукоятки для левой руки, шарнирно подсоединенной к верхней части колена 16 (не показано).
На фиг.7 изображен вариант, где вместо пневмокамеры 48 уловителя установлен пневмоцилиндр 48 уловителя (одностороннего действия), тогда нерабочая часть цилиндра постоянно соединена с атмосферой.
С целью более точной установки лезвия 94 стабилизатор 62 и бобышка 63 могут меняться местами, и тогда зуб 60 и боковые поворотники 61 тоже должны поменяться местами на направляющих 58.
Корпус 171 (фиг.12) рукоятки для левой руки на фронтальной проекции может быть жестко прикреплен к колену 16 в горизонтальном положении, то есть повернут против часовой стрелки на угол 90 градусов, чтобы гибкая трубка 102 была направлена горизонтально, тогда она будет огибать заднюю часть обрубной головки в момент ее вертикального расположения.
На фиг.23 показан разрез Д-Д фиг.2, где показано зубило 37, занимающее различные положения относительно переднего торца 20 и кольца 23 при повороте балки 29 на угол плюс-минус 90 градусов и при повороте пневморубильного молотка вокруг оси 38.
С целью расширения возможностей станка, конкретно с целью возможности начинать процесс рубки из точки Л в направлении И, указанном на фиг.23, шарнир 27 может иметь продольную ось, пересекающуюся с продольной осью 21 пальца 17 в точке Л вблизи торца 20 с наличием гарантированного зазора «а» между торцом 20 пальца и зубилом, а передний конец балки 29 тогда подсоединен шарнирно к средней части корпуса 25 обрубной головки, причем продольная ось пневмомолотка также совмещена с продольной осью шарнира корпуса.
С целью возможности начинать процесс рубки из одной точки Р (фиг.23) во всех четырех направлениях и во всех промежуточных направлениях на 360 градусов шарнир 27 может иметь продольную ось, пересекающуюся с осью 21 пальца 17 в такой точке Р вблизи торца 20, что между торцом 20 и зубилом имеется расстояние, равное сумме гарантированного зазора «а» и максимально возможного поперечного перемещения зубила в одном цикле рубки, то есть размера «з» на фиг.4. В этом случае продольная ось пневмомолотка совмещена с продольной осью корпуса обрубной головки, а передний конец балки шарнирно соединен с осью 30, неподвижно подсоединенной к средней части корпуса обрубной головки. Размер «з» есть максимально возможное поперечное перемещение зубила в направлении, перпендикулярном продольному перемещению зубила в одном цикле рубки. Например, при длине хода пневмомолотка «д» (фиг.6), равной 104 мм, и угле заточки инструмента 60 градусов угол наклона зубила к обрабатываемой поверхности составляет 30 градусов, поперечное перемещение составляет 60 мм, а продольное перемещение, то есть длина обрабатываемой поверхности, составляет 120 мм.
На фиг.19 представлена принципиальная пневмогидросхема обрубной головки, где вычерчены узнаваемые образы отдельных узлов: гидрокамеры или пневмокамеры 41, механизма уловителя пневмомолотка с пневмокамерой 48 и кулачками 50 и 51, пускателя 97, гидробака 156, отсекателя 90, пневмомолотка 32, управляющего стержня 87, шарнирно-рычажного механизма 31, дросселя 159. Гидробак имеет объем жидкости, достаточный, чтобы заполнить полость гидрокамеры при любом угле наклона оси пневмомолотка. Вверху гидробака имеется полость с воздухом, предотвращающая утечку жидкости по воздухопроводу и пускателю 150.
Работа станка
В исходном положении консоль и штанга расфиксированы, ось пневмомолотка расположена в одной плоскости с осью 21 пальца, корпус 25 может занимать любой возможный угол наклона к вертикали. Лезвие 94 зубила устанавливают в нужном месте на обрабатываемой поверхности 95 вращением балки 29 вокруг продольной оси балки, вращением обрубной головки вокруг оси 21 пальца 17, вращением колена 16 вокруг оси 14 штанги и вращением обрубной головки относительно точки совмещения в плоскости, параллельной оси 21 пальца 17. По высоте положение лезвия устанавливают перемещением штанги 9, а в горизонтальной плоскости лезвие перемещают с помощью двухсекционной консоли. Поворачивают рукоятку 98 для левой руки и этим фиксируют консоль и штангу, затем нажимают правой рукой на гашетку 85, которая нажимает регулятором 82 на золотник пускателя 97, и сжатый воздух поступает в гидробак 156, вытесняет из него жидкость сквозь дроссель 159 в полость гидрокамеры 41, шток гидрокамеры воздействует на шарнирно-рычажный механизм 31, который перемещает пневмомолоток 32 и прижимает лезвие к обрабатываемой поверхности. В этот момент стержень 87 освобождает золотник отсекателя 90, сжатый воздух поступает в пневмомолоток 32 и в пневмокамеру 48 уловителя, и начинается процесс рубки. Пневмокамера 48 отодвигает уловитель с кулачками 50 и 51 и освобождает пальцы 57, теперь оператор имеет возможность менять направление, то есть глубину рубки, и в том числе выводить лезвие наружу или копировать обрабатываемую поверхность. При приближении конца зубила к конечной точке рубки оператор отпускает гашетку 85, поступление сжатого воздуха прекращается, пружина 45 возвращает пневмомолоток в исходное положение, пружина 52 уловителя отодвигает кулачки 50 и 51 в исходное положение, и они приводят пневмолмолоток в исходное положение. Если оператор не успел и выключил гашетку после окончания процесса рубки, то пневмомолоток поработает какое-то время вхолостую, при этом зубило может перемещаться вдоль своей продольной оси в пределах зазора, имеющегося между бобышкой 63 и зубом 60, но остается в пневмомолотке и готово к повторному циклу рубки. В конце своего перемещения в исходное положение пневмомолоток нажимает на ролик 88, передвигает управляющий стержень 87, который нажал на золотник отсекателя 90, и работа пневмомолотка прекращается.
Далее могут быть два варианта: а) оператор, не расфиксируя консоль и штангу, может продолжать обработку на этом же участке и даже на этом направлении (например, углубиться либо изменить направление и произвести второй, третий и т.д. циклы рубки); б) поворачивают рукоятку левой руки, тем расфиксируют консоль и штангу, перемещают инструмент в другое место, фиксируют консоль со штангой и производят рубку уже в другом месте.
Если отсекатель 90 установлен на панели 91, а управляющий стержень 87 с роликом 88 отсутствуют, то нажимают гашетку сначала примерно на половину хода, и когда зубило оказывается поджато, дожимают гашетку на весь ход и ведут процесс рубки.
На фиг.21 изображен вариант, где имеются две рукоятки 77 для удобства оператора, т.к. зубило нужно поворачивать на угол в сумме 180 градусов.
Для ведения процесса клепки вместо зубила 94 в пневмомолоток вставляют клепальную оправку с полусферическим углублением на торце инструмента с такими же бобышками и стабилизатором.
Для трамбовки (трамбования), например для удаления пригара с поверхности отливки, вместо зубила 94 вставляют в пневмомолоток такое же зубило с бобышкой и стабилизатором, но имеющее тупой торец вместо острого лезвия или специальную трамбовку, если утрамбовывают иной материал, а не металл.
Методика расчета траектории движения противовеса 129 обрубной головки в механизме удержания обрубной головки в пространстве
Начальные условия
1. Вес обрубной головки 24 равен Q кг.
2. Обрубная головка подвешена в центре тяжести головки, когда головка находится в исходном положении.
3. Центр тяжести головки находится на расстоянии R от оси 21 пальца.
4. R=46 мм, как это видно из фиг.1, а точнее размер уточняется при изготовлении рабочих чертежей. В положении, когда ось обрубной головки горизонтальна, считаем, что угол α=0° (фиг.22). Головка может опускаться на угол минус 30 градусов в точку В.
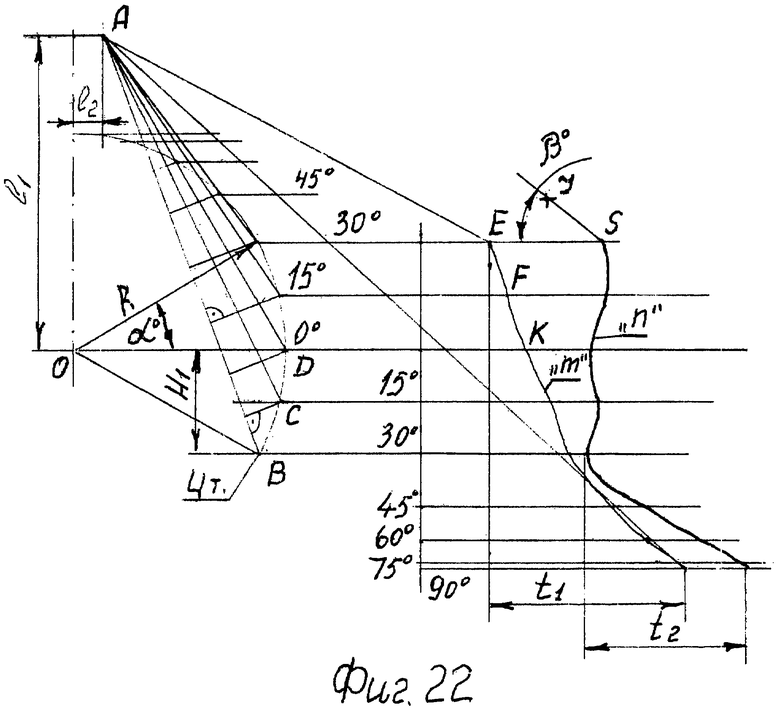
5. Вес противовеса Q1 равен весу Q обрубной головки. В левой части фиг.22 схематично изображено взаимное расположение центра тяжести обрубной головки при повороте ее вокруг точки О, совмещенной с осью 21 пальца колена. Образующая блока 105 колена расположена в точке А на расстоянии е1 по вертикали и е2 по горизонтали от точки О. В правой части фиг.22 строим теоретический профиль кулачка 137, по которому перемещается противовес. В положении головки, когда ее центр тяжести находится в точке В (угол α=-30 градусов), центр тяжести отстоит от горизонтали на расстоянии H1=R·sin 30°=46·0,5=23 мм. В точке С он отстоит на расстоянии 12 мм и т.д. (см. табл., графа 3). На фиг.22 эти расстояния отмечены горизонтальными линиями. Для первоначального положения головки в точке В при угле α=-30 градусов начальное положение противовеса есть точка Е при α=+30 градусов, то есть выполнено условие равенства работы по подъему и опусканию грузов одинаковой величины.
Из фиг.22 видно, что после подъема из точки В в точку С длина участка АВ уменьшилась и стала АС, то есть стала на 9 мм короче. При угле α=0 градусов - длина АD стала короче на 18 мм и т.д. (см. табл., графа 4) - взвешенное состояние наступает, когда работа по подъему головки равна работе опускания противовеса головки. Для примера поместим поддерживающий ролик противовеса в точку А, тогда при начальной длине АВ=АЕ=96 мм, длина AF=96+9=105 мм. Тогда на горизонтали, соответствующей углу поворота α=+15 градусов, делаем засечку из точки A на линии 15 градусов и получаем точку F на линии α=0° радиусом AK=96+18=114 мм и т.д. (см. табл., графа 5). Получили точку K и т.д. Соединяем точки E, F, K плавной линией «m» и получаем теоретический профиль кулачка. Поскольку противовес двигается по кулачку на подшипнике с радиусом (например) 40 мм, то практический профиль отстоит от теоретического профиля левее и ниже теоретического на 40 мм. Однако такие большие габариты механизма могут быть неприемлемы, поэтому строим кулачок по тому же принципу, но поддерживающий блочок 134 помещаем в точку Y, которая находится на начальном расстоянии YS=15 мм от начала теоретического профиля, под углом β=37 градусов к горизонтали. Варьируя положение точки Y относительно начальной точки кулачка, можем получать разные кулачки. Вариант «n» более приемлем, т.к. имеет меньшие габариты (размер t2 меньше размера t1, фиг.22). Поскольку фиг.1 выполнена в масштабе М, то все линейные размеры кулачка, выполняемые в металле, при рабочем проектировании нужно соответственно увеличить, умножив на М.
Достигнуты следующие технические результаты: механизированы процессы рубки, клепки, трамбовки, при этом сохранена и повышена маневренность по сравнению с прототипом. Это достигнуто за счет рациональной кинематической схемы станка. Существенно упрощен станок - он имеет только пневматику либо пневматику с простой гидравликой, отсутствуют гидромоторы, электрика. Станок можно изготовить в механической мастерской. Станок универсален, то есть может рубить, клепать, трамбовать. Такой станок необходим для облегчения условий труда и снижения профзаболеваний, так как в настоящее время ведется в основном ручная рубка пневмомолотком.
| название | год | авторы | номер документа |
|---|---|---|---|
| СНАРЯЖЕНИЕ ДЛЯ ОБРУБКИ ОТЛИВОК И КЛЁПКИ | 2014 |
|
RU2581935C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ РАЗОВЫХ ЛИТЕЙНЫХ ФОРМ БЕЗ МОДЕЛИ ОТЛИВКИ И СТАНОК ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ РАБОЧЕЙ ПОВЕРХНОСТИ ПОЛУФОРМЫ | 2011 |
|
RU2510729C2 |
| СТАБИЛИЗАТОР ПЕНИСА | 2009 |
|
RU2417062C1 |
| СПОСОБ И ОСНАСТКА ДЛЯ ИЗГОТОВЛЕНИЯ ЛИТЕЙНЫХ СТЕРЖНЕЙ | 2011 |
|
RU2481918C2 |
| СТАБИЛИЗАТОР ПЕНИСА | 2008 |
|
RU2383314C2 |
| СТАБИЛИЗАТОР ПЕНИСА (ВАРИАНТЫ) | 2007 |
|
RU2337649C1 |
| СТАБИЛИЗАТОР ПЕНИСА | 2012 |
|
RU2481808C1 |
| УСТРОЙСТВО ДЛЯ СРЕЗКИ ГОЛОВ СВАЙ | 1972 |
|
SU323509A1 |
| МЕХАНИЗМ ДЛЯ ОЧИСТКИ ТРУБ | 1965 |
|
SU175360A1 |
| МОЛОТОК ПНЕВМАТИЧЕСКИЙ КЛЕПАЛЬНЫЙ | 2001 |
|
RU2227090C2 |

Станок для обрубки, клепки, трамбовки предназначен для обработки металлов, камня, бетона и уплотнения материалов и может быть использован для обработки криволинейных поверхностей. Станок содержит поворотную в горизонтальной плоскости двухсекционную консоль, обрубное устройство с обрубной головкой и пневмомолотком, механизм удержания обрубного устройства во взвешенном состоянии, механизм удержания обрубной головки во взвешенном состоянии, пневмосистему и пневмогидросистему. Обрубное устройство состоит из неподвижно подсоединенной к консоли каретки, в которой помещена штанга с возможностью передвижения в вертикальном направлении. На нижнем конце штанги шарнирно закреплен горизонтальный отвод, к которому неподвижно подсоединено своим верхним концом колено. На нижнем конце колена закреплен горизонтальный цилиндрический палец, к которому шарнирно подсоединен своим передним концом корпус обрубной головки, имеющий возможность поворота вокруг оси пальца на неполный угол в вертикальной плоскости и других плоскостях, перпендикулярных упомянутой вертикальной плоскости. Корпус обрубной головки может занимать различные положения, что расширяет его технологические возможности. Обеспечивается механизация технологических процессов, упрощение конструкции, повышение производительности труда. 31 з.п. ф-лы, 23 ил., 1 табл.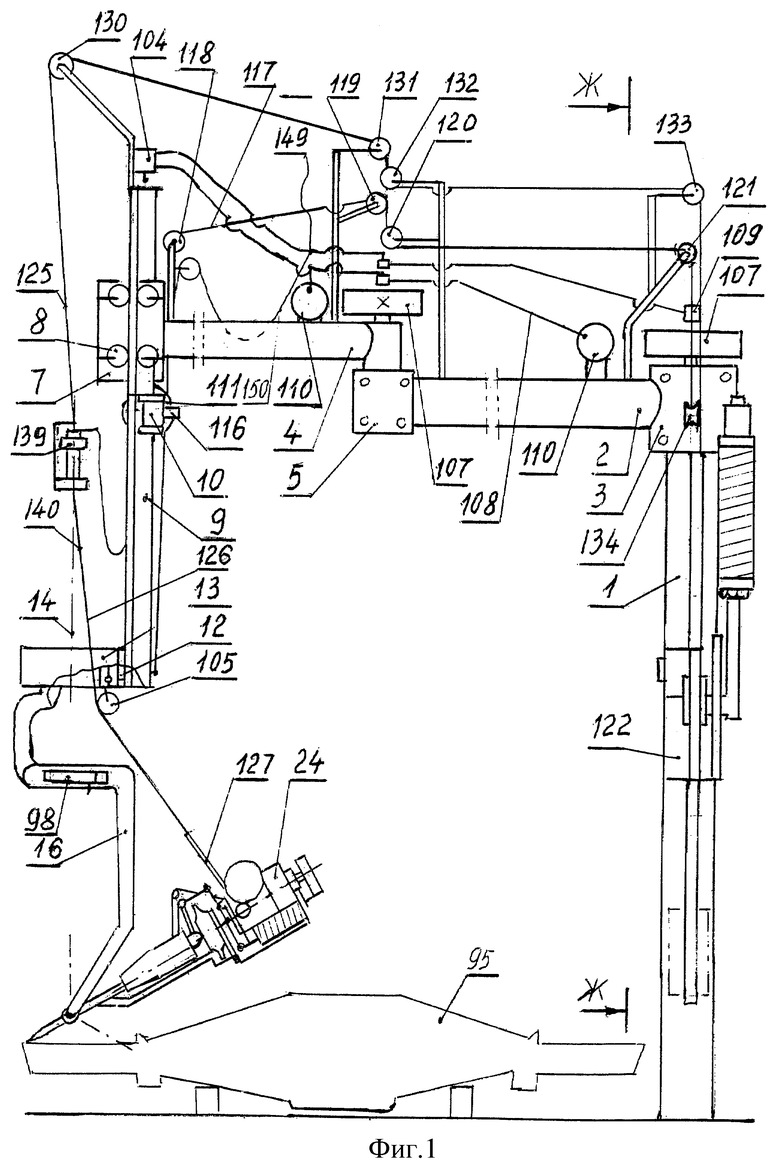
1. Станок для обрубки, клепки, трамбовки, содержащий поворотную в горизонтальной плоскости двухсекционную консоль, обрубное устройство с обрубной головкой и пневмомолотком, механизм удержания обрубного устройства во взвешенном состоянии, механизм удержания обрубной головки во взвешенном состоянии, пневмосистему фиксации консоли с обрубным устройством и пневмо-гидросистему обрубной головки, отличающийся тем, что к свободному концу консоли подвижно вверх и вниз подсоединено обрубное устройство с обрубной головкой, состоящее из неподвижно подсоединенной к концу консоли каретки, в которой помещена штанга с возможностью передвижения в вертикальном направлении и занимать различные по высоте фиксированные положения, причем нижний конец штанги имеет жесткий горизонтальный отвод, имеющий шарнир штанги с вертикальной осью вращения, отстоящей от штанги на некоторое расстояние, а к внутренней обойме шарнира штанги неподвижно подсоединено своим верхним концом колено, имеющее на своем нижнем конце горизонтальный цилиндрический палец колена с кольцевой канавкой на конце и имеющий горизонтальную ось пальца колена.
2. Станок по п.1, отличающийся тем, что указанный палец колена расположен таким образом, что передняя боковая образующая кольцевой канавки пересекается с упомянутой осью шарнира штанги в точке совмещения, а к пальцу колена на месте кольцевой канавки шарнирно подсоединен своим передним концом с помощью кольца или скобы корпус обрубной головки, имеющий возможность поворота вокруг оси пальца на неполный угол в вертикальной плоскости и одновременно имеющий возможность поворота на неполный угол в любых других возможных плоскостях, перпендикулярных упомянутой вертикальной плоскости, причем поворот корпуса в этих перпендикулярных плоскостях может происходить на угол, обеспечивающий возможность изменения направления рубки в одном цикле рубки, так что корпус обрубной головки может занимать различные положения внутри конуса с вершиной в точке совмещения.
3. Станок по п.2, отличающийся тем, что противоположный задний конец корпуса обрубной головки имеет шарнир, ось которого проходит через точку совмещения, а к переднему концу внутренней обоймы шарнира корпуса жестко подсоединена своим задним концом разъемная или неразъемная балка, причем к переднему концу корпуса обрубной головки или к средней его части шарнирно подсоединен передний конец балки с осью шарнира, совпадающей с осью шарнира корпуса.
4. Станок по п.3, отличающийся тем, что к балке шарнирно подсоединен шарнирно-рычажный механизм, состоящий из коромысла, стояка и кривошипа, причем к балке сначала шарнирно подсоединено своей средней частью коромысло, имеющее верхний и нижний концы, а верхний конец коромысла шарнирно подсоединен к одному концу стояка, который своим противоположным концом шарнирно соединен со средней частью кривошипа, который своим верхним концом шарнирно соединен с балкой, а своим нижним концом соединен шарнирно, с виброзащитой, с задним торцем пневмомолотка так, что ось этого последнего шарнира может перемещаться в вертикальной плоскости по дуге окружности, а угол между осью корпуса и лучом, соединяющим начальную и конечную точки перемещения, составляет 30°, и продольная ось станочного пневмомолотка пересекается с осью пальца вблизи переднего торца пальца с зазором, причем ось шарнира, соединяющего коромысло с корпусом обрубной головки, перпендикулярна продольной оси станочного пневмомолотка.
5. Станок по п.2, отличающийся тем, что к корпусу обрубной головки неподвижно закреплена гидрокамера или пневмокамера, шток которой имеет ось, совмещенную с продольной осью пневмомолотка, а на своем конце шток имеет полусферическую пяту, подвижно соединенную со средней частью нижнего конца коромысла, причем нижний конец коромысла своим нижним концом шарнирно подсоединен к сердечнику, противоположный конец которого свободно продет в отверстие, имеющееся в заднем конце балки, причем на сердечник свободно надета цилиндрическая, главная пружина, нажимающая с силой одним своим концом на задний конец балки, а другим своим концом нажимающая с силой на натяжную гайку, навинченную на сердечник.
6. Станок по п.4, отличающийся тем, что станочный пневмомолоток имеет один или два пальца пневмомолотка, на которых могут быть свободно надеты ролики, а к балке неподвижно присоединена пневмокамера или пневмоцилиндр одностороннего действия со штоком, имеющем на своем противоположном конце уловитель с нижним и верхним кулачками, входящими в соприкосновение с пальцами или роликами пневмомолотка при исходном заднем положении пневмомолотка, а в переднем положении пневмомолотка соприкосновение может отсутствовать, причем уловитель подвижно соединен с балкой и имеет возможность совершать возвратно-поступательные движения, параллельные продольной оси пневмомолотка в исходном положении, а на уловитель действует одним концом с силой пружина возврата уловителя, другим своим концом действующая с силой на балку.
7. Станок по п.4, отличающийся тем, что станочный пневмомолоток имеет на заднем своем торце цапфу и ершик для подвода сжатого воздуха, а корпус пневмомолотка спереди имеет наружную резьбу или наружные пазы, с помощью которых к корпусу пневмомолотка быстросъемно подсоединена втулка с внутренней резьбой или зубьями, причем упомянутая втулка имеет одно или два правила, расположенных параллельно оси пневмомолотка, и имеющих с внутренней стороны один или два крючка, а также каждое правило имеет два боковых поворотника.
8. Станок по п.4, отличающийся тем, что станочный пневмомолоток имеет станочное зубило, имеющее одну или две подсоединенные неразъемно к зубилу бобышки, входящие в зацепление с крючками с зазором, а зубило имеет также один или два стабилизатора, расположенных между двумя боковыми поворотниками, причем зубило имеет продольное перемещение в пределах зазора, а правила, крючки и поворотники имеют габаритную ширину, равную диаметру зубила.
9. Станок по п.8, отличающийся тем, что между зубилом и передним торцем пальца колена имеется зазор, имеющий величину, не меньшую чем отклонение станочного зубила вдоль режущей кромки зубила во время рубки в одном цикле.
10. Станок по п.3, отличающийся тем, что к балке неподвижно подсоединена вертикальная площадка, параллельная продольной оси станочного пневмомолотка, сбоку от пневмомолотка, а перпендикулярно площадки неподвижно закреплена ось прижима, на которую плотно надета демпфирующая втулка, а на нее свободно надета втулка прижима, имеющая поворот вокруг оси прижима и ограниченная в передвижении вдоль этой оси, причем к втулке прижима неподвижно прикреплен кронштейн, имеющий на своем противоположном конце скобу, которая одета на направляющую сверху с возможностью продольного перемещения направляющей внутри скобы, а скоба состоит из двух щек и перемычки, причем внутренние поверхности щек параллельны плоскости площадки.
11. Станок по п.10, отличающийся тем, что на втулку прижима свободно надета витая цилиндрическая пружина кручения, один конец которой ограничен в передвижении балкой, а другой противоположный конец расположен сверху кронштейна и нажимает на кронштейн с силой.
12. Станок по п.3, отличающийся тем, что внутренняя обойма шарнира корпуса ограничена в своем продольном перемещении гайкой, зафиксированной стопорными болтами, а к гайке неподвижно подсоединен кронштейн рукоятки для правой руки оператора, к противоположному концу которого неподвижно подсоединен цилиндрический стержень, имеющий на своей наружной поверхности 2…4 витка спиральной проточки с шагом, равным шагу пружины, одним своим концом навитой на цилиндрический стержень, причем конец проволоки пружины жестко подсоединен к цилиндрическому стержню, а противоположный конец пружины служит для воздействия правой руки оператора.
13. Станок по п.12, отличающийся тем, что внутренняя обойма шарнира корпуса в своем центре имеет отверстие, в котором помещен шток, имеющий возвратно-поступательное движение вдоль оси вращения балки и имеющий регулятор своей длины с фланцем, а противоположный конец штока имеет гашетку, на которую воздействует с силой пружина, другим своим концом воздействующая с силой на внутреннюю втулку шарнира корпуса.
14. Станок по п.10, отличающийся тем, что балка имеет возможность поворота вокруг своей оси на неполный угол 90° в оба направления от исходного, в котором площадка занимает вертикальное положение, а ось обрубной головки занимает горизонтальное положение.
15. Станок по п.2, отличающийся тем, что к корпусу головки подвижно подсоединен управляющий стержень, имеющий возвратно-поступательное движение вдоль оси пневмомолотка в исходном положении, а на одном конце управляющего стержня имеется ролик с осью, перпендикулярной продольной оси пневмомолотка, и ролик контактирует с задним торцем станочного пневмомолотка, имеющего площадку в виде полукольца, а противоположный конец управляющего стержня имеет регулятор длины управляющего стержня, воздействующего на отсекатель сжатого воздуха, подсоединенный неподвижно к балке, или к корпусу обрубной головки, или к панели, неподвижно соединенной с корпусом обрубной головки.
16. Станок по п.2, отличающийся тем, что к корпусу обрубной головки в центре тяжести обрубной головки неподвижно подсоединен своей наружной втулкой центральный воздухоподводящий шарнир с осью вращения, перпендикулярной продольной оси пневмомолотка.
17. Станок по п.1, отличающийся тем, что к колену шарнирно подсоединена виброзащитная рукоятка для левой руки оператора, имеющая рычажок и имеющая поворот на неполный угол, а к рычажку шарнирно подсоединена одним концом скобка, а к противоположному концу скобки подсоединен гибкий тонкий металлический канатик, помещенный внутри гибкой трубки, выполненной в виде витков проволоки, соприкасающихся друг с другом, и свитой спиралью, а один конец гибкой трубки неподвижно закреплен к колену, другой конец трубки подсоединен к верхней части штанги, причем при повороте рукоятки для левой руки канатик перемещается в продольном направлении внутри гибкой трубки и своим противоположным концом подсоединен к золотнику распределителя, неподвижно подсоединенного к верхней части штанги.
18. Станок по п.1, отличающийся тем, что к внутренней обойме шарнира штанги к нижнему ее концу подсоединен блок колена с осью вращения, параллельной оси цилиндрической шейки и имеющий широкий ручей, в котором помещены гибкий рукав и гибкая связь, причем блок колена подсоединен так, что гибкий рукав и гибкая связь свободно могут перемещаться внутри шарнира штанги.
19. Станок по п.1, отличающийся тем, что консоль и штанга способны занимать различные фиксированные положения и имеют для этой цели систему фиксации консоли с обрубным устройством, имеющую два ленточных тормоза, установленных в шарнирах поворотной консоли, трубопроводы, три воздухоподводящих шарнира, расположенных по осям шарниров консоли, три пневмокамеры, неподвижно подсоединенных к секциям консоли и к колодочному тормозу, один распределитель, рукоятку для левой руки оператора и три воздушных крана.
20. Станок по п.1, отличающийся тем, что каретка имеет колодочный тормоз, состоящий из двух тормозных колодок, контактирующих с противоположными вертикальными поверхностями штанги и имеющих возвратно-поступательные движения в направлении, перпендикулярном упомянутым плоскостям штанги, тормоз имеет скобу тормоза, к одному концу которой неподвижно подсоединена пневмокамера, а к противоположному концу скобы неподвижно подсоединена одна колодка тормоза, причем вторая колодка тормоза неподвижно подсоединена к штоку пневмокамеры, а обе тормозные колодки ограничены в своем движении в вертикальном направлении.
21. Станок по п.1, отличающийся тем, что механизм удержания обрубного устройства во взвешенном состоянии, состоящий из каната, подсоединенного одним концом к нижней части штанги, который огибает блок, установленный на коечной секции консоли рядом со штангой, затем блок, установленный на противоположном конце этой же секции консоли и имеющий ручей, совпадающий с осью шарнира консоли, затем блок, установленный на конце первой секции консоли и имеющий ручей, совпадающий с осью вращения концевой секции консоли и расположенный выше или ниже предыдущего блока, затем блок, установленный на первой секции консоли возле колонны, а противоположный конец каната подсоединен к контргрузу штанги, имеющему вес, равный сумме весов штанги и весов узлов, неподвижно подсоединенных к штанге, кроме веса обрубной головки.
22. Станок по п.21, отличающийся тем, что к первой секции консоли возле колонны жестко подсоединена вертикальная направляющая, по которой может совершать возвратно-поступательные движения вверх и вниз контргруз штанги, имеющий каретку контргруза.
23. Станок по п.1, отличающийся тем, что механизм удержания обрубной головки во взвешенном состоянии состоит из гибкой связи, к переднему концу которой подсоединена верхним концом П-образная скоба, своим нижним горизонтальным, концом плотно продетая во внутреннее кольцо воздухоподводящего центрального шарнира, а к заднему концу гибкой связи с помощью системы блоков подсоединен противовес головки.
24. Станок по п.23, отличающийся тем, что противовес головки может двигаться вверх и вниз по специально рассчитанной траектории по кулачку противовеса в вертикальной плоскости под действием собственной силы тяжести и силы натяжения заднего конца гибкой связи, а кулачек жестко соединен с основанием, имеющим вертикальную стойку с поддерживающим блоком на верхнем своем конце, причем основание неподвижно подсоединено к каретке, а передний конец гибкой связи может быть выполнен в виде стального гибкого каната, либо в виде втулочно-роликовой цепи, способной прогибаться в вертикальной плоскости, либо в виде стального гибкого каната, помещенного в гибкий рукав, пропускающий сжатый воздух.
25. Станок по п.23, отличающийся тем, что П-образная скоба выполнена в виде жесткой трубы, внутри которой может протекать сжатый воздух, а форма и размеры ее зева позволяют поместить в зеве детали обрубной головки, поворачиваемые вместе с корпусом и кистью оператора, а также поместить детали, поворачиваемые вместе с балкой на угол не менее 90° в оба направления от исходного положения, а в средней своей части гибкая связь имеет скобу, которая своим верхним концом соединена с задним концом гибкой связи, а своим нижним концом соединена с передним концом гибкой связи, а к скобе шарнирно подсоединен воздухоподводящий подвесной шарнир.
26. Станок по п.23, отличающийся тем, что он имеет рычаг, шарнирно соединенный с основанием и имеющий продольный паз, а к противоположному концу рычага подсоединен задний конец гибкой связи, причем рычаг в пазу подвижно соединен с передним концом толкателя, имеющего цилиндрическую пружину, шарнирно соединенную своим задним концом к основанию, и давит на него с силой, а передним концом давит с силой на натяжную гайку, навинченную на толкатель, причем передний конец толкателя имеет перемещение по кулачку рычага, неподвижно соединенному с основанием, так что толкатель может нажимать на рычаг в разных точках и создавать разный по величине крутящий момент с необходимой силой натяжения заднего конца гибкой связи.
27. Станок по п.24 или 26, отличающийся тем, что основание с кулачком или основание с рычагом подсоединены неподвижно к верхнему концу штанги, причем основание с рычагом подсоединено двумя вариантами:
когда рычаг имеет вращение в вертикальной плоскости, либо когда рычаг имеет вращение в горизонтальной плоскости.
28. Станок по п.2, отличающийся тем, что обрубная головка имеет пневмогидроаппаратуру, содержащую пускатель сжатого воздуха, срабатывающий при движении фланца регулятора, гидробак с жидкостью, дроссель для регулировки скорости холостого хода пневмомолотка, гидромуфту в месте скручивания гибкого рукава, гидрокамеру или пневмокамеру для передвижения пневмомолотка, отсекатель сжатого воздуха для пуска сжатого воздуха в нужный момент времени, воздухоподводящий параллельный шарнир в месте скручивания гибкого рукава, пневмомолоток и пневмокамеру или пневмоцилиндр одностороннего действия для улавливания пневмомолотка.
29. Станок по п.2, отличающийся тем, что к корпусу обрубной головки, возможно ближе к ее центру тяжести, неподвижно подсоединен гидробак, имеющий верхнее отверстие для сжатого воздуха и нижнее отверстие для жидкости, а к нижнему отверстию подсоединен дроссель для жидкости, причем внутри гидробака имеются отражатель фонтана жидкости и лабиринты.
30. Станок по п.15, отличающийся тем, что отсекатель сжатого воздуха подсоединен к панели с возможностью воздействовать на его золотник непосредственно фланцем регулятора.
31. Станок по п.17, отличающийся тем, что на золотник распределителя воздействует с силой своим верхним концом стержень управления, подвижно вверх и вниз соединенный со штангой, и имеющий пружину возврата, а нижний конец стержня управления неподвижно соединен с плоским кольцом с осью, совмещенной с осью шарнира штанги, и одетым подвижно вверх и вниз на внутреннюю обойму шарнира штанги, а плоское кольцо получает движение от рукоятки для левой руки оператора, шарнирно подсоединенной к верхней части колена.
32. Станок по п.2, отличающийся тем, что передний конец балки шарнирно подсоединен к средней части корпуса обрубной головки, а задний конец балки неподвижно подсоединен к внутренней обойме шарнира корпуса, так что балка имеет поворот на угол не менее 90° в оба направления от исходного положения, а ось пневмомолотка совмещена с осью вращения балки, причем ось вращения балки пересекается с осью пальца колена вблизи торца пальца колена в таких точках, что между торцем пальца колена и зубилом имеется гарантированный зазор или имеется промежуток длиной, не меньшей чем сумма гарантированного зазора и поперечного перемещения зубила в одном цикле рубки.
| А. Н. Устинов, С. Я. Шац, М. А. Широковаи В. Н. Шляпин". 'f с-Г.СОЮЗНАЯWi4^-iiill?pEK/^.fiI ::.•• •:.,•• <•••• -•• '•'•• -- | 0 |
|
SU286155A1 |
| Манипулятор для зачистки отливок | 1983 |
|
SU1202703A1 |
| WO 03089170 A1, 30.10.2003 | |||
| ТРОСОВОЕ УСТРОЙСТВО для ПРИНУДИТЕЛЬНОГО ЗАДАВЛИВАНИЯ ИЛИ ИЗВЛЕЧЕНИЯ ОБСАДНЫХ ТРУБ | 0 |
|
SU183159A1 |

