Область техники, к которой относится изобретение
Изобретение относится к электронным системам для транспортных средств, в частности к системам помощи при парковке.
Уровень техники
Использование ультразвуковой системы в системе автоматической парковки позволяет определить траекторию транспортного средства и обнаружить подходящее парковочное место на основании показаний датчиков. Например, парковочное место может представлять собой участок для параллельной или перпендикулярной парковки. Однако при сканировании в поисках парковочного места может наступить состояние ошибки, когда вместо отраженных ультразвуковых волн датчик улавливает сигналы или волны, излучаемые другими транспортными средствами или источниками. Состояние ошибки также может наступить, когда сигналы отражаются от других транспортных средств.
Раскрытие изобретения
В активной системе автоматической парковки (парковочного ассистента) используют технологию ультразвуковых датчиков для сканирования и обнаружения подходящего парковочного места, чтобы помочь водителям при парковке транспортных средств около бордюра. Однако другие транспортные средства, находящиеся рядом с оборудованным транспортным средством, также могут быть оборудованы ультразвуковыми излучателями, что может привести к искажению показаний, принимаемых датчиком, в результате чего при формировании результатов об объектах, расположенных рядом с транспортным средством, могут возникнуть ошибки. Для решения указанной проблемы может быть использована времяпролетная система, которая имеет сверхскоростной триггер, который может открывать и закрывать временные окна приема отраженных данных в течение определенных промежутков времени, когда сигналы должны отразиться от расположенных рядом объектов, игнорируя данные за пределами указанного окна, которые могут появляться из-за наличия других передатчиков. Различные системы автоматической парковки, установленные на транспортном средстве, излучают собственные сигналы в пределах различных событийных временных окон, что позволяет избежать их перекрытия друг с другом.
Таким образом, предложен способ определения расстояния от транспортного средства до объекта, в котором посылают первый сигнал передачи от первого передатчика в течение первого периода передачи данных, принимают первый отраженный сигнал приемником в течение первого периода прослушивания, а также посылают второй сигнал передачи от второго передатчика в течение второго периода передачи данных. Второй сигнал передачи посылают на основании момента, когда был послан первый сигнал передачи.
Другим объектом изобретения является энергонезависимый машиночитаемый носитель, на котором содержатся выполняемые компьютером инструкции для направления первого импульса в течение первого периода передачи данных, принятия первого отраженного сигнала в течение первого периода прослушивания, направления второго импульса в течение второго периода передачи данных и определения времени, когда направлен второй импульс на основании момента, когда был направлен первый импульс.
В качестве еще одного объекта предложено оборудованное транспортное средство, которое включает в себя по крайней мере два передатчика, по крайней мере один расположенный на транспортном средстве приемник и компьютер. Компьютер запрограммирован на направление первого пакетного сигнала от одного из передатчиков в течение первого периода передачи данных, получение первого отраженного сигнала в течение первого периода прослушивания, направление второго пакетного сигнала от другого передатчика в течение второго периода передачи данных, и определение времени, когда направлен второй пакетный сигнал на основании момента, когда был направлен первый пакетный сигнал.
Краткое описание чертежей
На Фиг. 1 показан вид сверху транспортного средства рядом с которым впереди и позади находятся другие транспортные средства, которые ограничивают парковочное место для осуществления автоматической парковки;
На Фиг. 2 показаны компоненты транспортного средства, связанные с выполнением автоматической парковки;
На Фиг. 3 показана логическая схема способа парковки транспортного средства;
На Фиг. 4 показаны этапы алгоритма или способа.
Осуществление изобретения
На Фиг. 1 показан сценарий 100 автоматической парковки «Активная автопарковка» (АРА), в котором проезжающее транспортное средство 102, например, легковой автомобиль, может использовать систему автопарковки для помощи водителю или его инструктирования о том, какие действия следует выполнить, чтобы припарковать транспортное средство, например, путем параллельной парковки. Когда транспортное средство 102 проходит вдоль пути 104, система авгоаарковки идентифицирует парковочное место 106 как пространство между двумя припаркованными транспортными средствами 108 и 110. Таким образом, парковочное место ограничено пространством между транспортными средствами 108, 110, и оно также имеет границу на дальней стороне, например, бордюр 112. Парковочное место 106 может иметь границу или быть ограничено любым типом или количеством объектов или ограничителей, не обязательно транспортными средствами 108, 110 и бордюром 112.
На Фиг. 2 показано, что в транспортном средстве 102 имеется тормозная система 200, педаль 202 газа, трансмиссия 204, модуль 206 управления системой автопарковки (РАСМ) и колеса 208. Транспортное средство 102 также имеет систему 210 торможения, педаль тормоза 212, силовой агрегат 214, аудиоинтерфейс 216 и дисплей 218. В данном примере также показана система 220 рулевого управления, которая включает в себя электродвигатель 224 и рулевое колесо 226. Система рулевого управления может быть использована с усилителем, либо может представлять собой любой тип системы рулевого управления, например, обычную вакуумную/гидравлическую систему, систему с электрогидравлическим усилением (EHPAS) или систему «Управление с помощью электроники». Транспортное средство 102 может содержать акселерометр, который измеряет ускорение транспортного средства 102.
В показанном варианте система 228 датчиков функционально соединена с транспортным средством 102 и может быть соединена с РАСМ 206 для направления на него входного сигнала (сигналов). Система 228 датчиков включает в себя датчики для определения параметров окружающей среды транспортного средства, например, камеру 230, ультразвуковые (U/S) датчики 232 (которые могут включать в себя передатчик и датчик/приемник), радиолокатор 234 и датчик 236 рулевого управления, в качестве примеров. Хотя это не показано, система 228 датчиков может также включать в себя такие системы как, например, лазерные локаторы, тепловые датчики и систему GPS (без ограничения перечисленным). Как показано на Фиг. 1, четыре приемопередатчика или датчика 114, например, ультразвуковые датчики, могут быть расположены на левой и правой сторонах транспортного средства 102 рядом с передним и задним бамперами для обеспечения полного или практически полного 360° охвата пространства вокруг транспортного средства 102. При необходимости количество, тип и/или расположение датчиков могут отличаться от показанного на схеме.
Система 228 датчиков может включать в себя датчики для определения состояния или режима работы различных бортовых систем транспортного средства 102, например, датчик одометра (не показан) и/или датчик 236 угла поворота рулевого колеса. Датчики одометра могут быть расположены на одном или нескольких колесах 226 транспортного средства 102 и/или в системе 204 трансмиссии транспортного средства 102. В качестве примера датчик 236 угла поворота рулевого колеса связан с системой 220 рулевого управления транспортного средства 102 и может, например, находиться на рулевом колесе 226 или на рулевой колонке. Транспортное средство 102 может быть также оборудовано видеодисплеем 218 для отображения различных типов информации для водителя. Транспортное средство 102 также может иметь устройства 216 звукового интерфейса, например, динамик, предупредительный звуковой сигнал, гудок или иное устройство для генерации звуков.
Как показано на Фиг. 1, транспортное средство 102 паркуется на парковочном месте 106 с использованием РАСМ 206. При выполнении этого маневра по крайней мере один из датчиков 114 использован для обнаружения соседних объектов и их расположения относительно положения транспортного средства 102, когда транспортное средство 102 движется по пути 104 и проезжает мимо объектов 110, 108. На Фиг. 1 в качестве соседних объектов, образующих границы парковочного места 106, показаны два припаркованных транспортного средства 110, 108 и бордюр 112. Предполагается, что РАСМ 206 может успешно обнаружить парковочное место 106 по отношению только к одному объекту или транспортному средству, например, либо транспортному средству 108, либо транспортному средству 110, если они присутствуют.
РАСМ 206 включает в себя компонент обработки данных, который обрабатывает информацию от датчика (датчиков) для оценки возможности успешно припарковать транспортное средство 102 на парковочном месте 106. Компонент обработки данных может, например, представлять собой устройство на основе микропроцессора, как известно из уровня техники. Оценка, выполняемая в РАСМ 206, может включать в себя определение возможности следования по доступной траектории 116 движения для парковки транспортного средства 102 на парковочном месте 106. При наличии доступной траектории 116 движения РАСМ 206 определит, что парковочное место может быть использовано как парковочное место. Расчеты, выполняемые РАСМ 206, могут предполагать определение подходящей длины 118 места в зависимости от таких параметров, как длина 120 транспортного средства 102 и/или возможный радиус поворота транспортного средства 102, и/или любых других геометрических параметров, связанных с транспортным средством 102 и/или другими объектами в непосредственной близости от парковочного места 106.
Движение транспортного средства 102 по траектории 116 можно осуществить посредством одного или нескольких парковочных маневров, в зависимости от необходимости, пока транспортное средство не будет правильно припарковано. В соответствии с изобретением, один парковочный маневр определяется как (1) перемещение транспортного средства задним ходом от места остановки на парковочное место, (2) остановка транспортного средства на парковочном месте, (3) перемещение транспортного средства вперед на парковочном месте и (4) последующая остановка, соответствующая завершению парковки транспортного средства. Обычно в рамках каждого этапа парковочного маневра для следования траектории 116 необходимо по крайней мере одно действие или движение системы 220 рулевого управления. Если парковочное место 106 слишком мало по сравнению с длиной транспортного средства 120 и/или радиусом поворота, может потребоваться последующее движение транспортного средства 102 назад и/или вперед, что соответствует дополнительному парковочному маневру.
После определения того, что транспортное средство 102 правильно припарковано в желаемом припаркованном положении, РАСМ 206 включает систему 220 рулевого управления с целью возвращения в центральное положение. В одном примере выполняется включение электродвигателя 224 для перемещения рулевого колеса 226 и связанных с ним компонентов системы 220 рулевого управления таким образом, чтобы управляемые ходовые колеса транспортного средства 102 были выровнены параллельно продольной (в направлении вперед-назад) оси 122 транспортного средства 102.
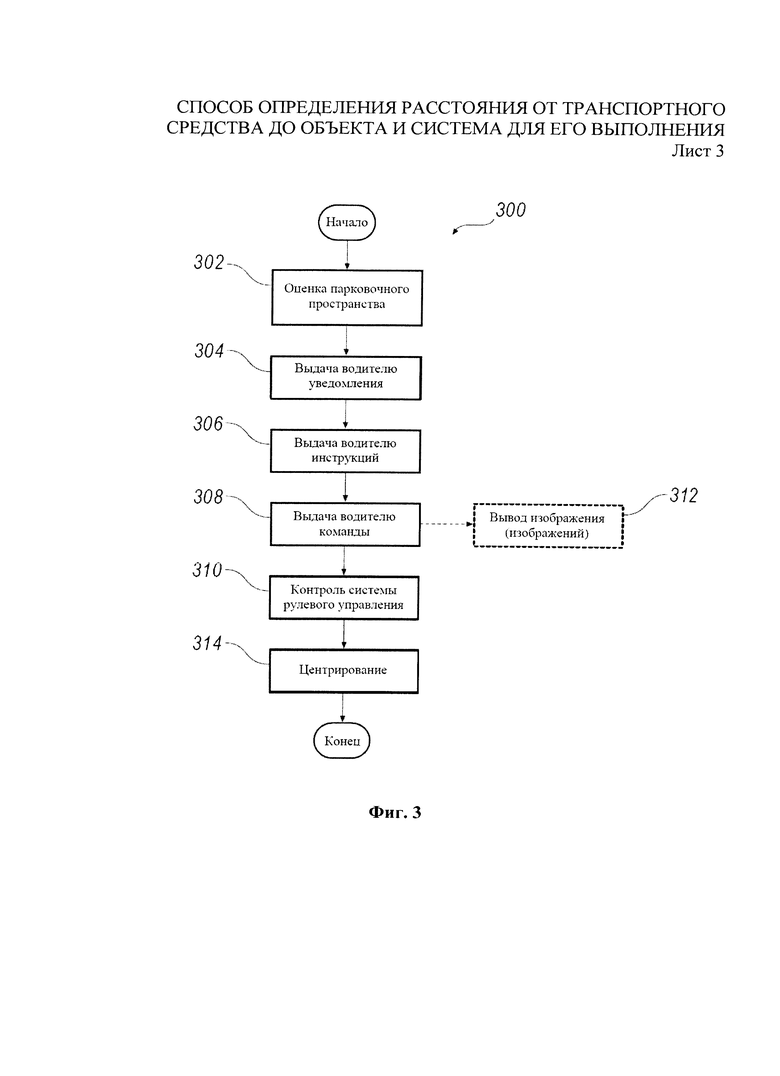
На схеме 300 с Фиг. 3 проиллюстрирован способ парковки транспортного средства. На первом этапе 302 модуль обработки, например, РАСМ 206, определяет, есть ли возможное парковочное место для парковки транспортного средства 102. Это может быть выполнено, например, с помощью сигналов от датчика (датчиков) 114 системы 228 датчиков. Возможным парковочным местом является место (например, парковочное место 106), имеющее достаточно большие размеры, чтобы на нем можно было припарковать транспортное средство 102 с помощью системы автопарковки, которой он оборудован.
Если на этапе 302 определено, что парковочное место подходит для парковки, на этапе 304 водителю направляется уведомление или предупреждение о том, что существует возможное парковочное место. Уведомление может быть передано посредством интерфейса визуальных и/или звуковых сигналов, например, выведено на дисплей 218 в транспортном средстве 102. В качестве альтернативы, визуальным интерфейсом может быть графическое изображение, значок или иное нетекстовое сообщение на дисплее 218. Такой визуальный интерфейс может быть расположен в любом подходящем месте в транспортном средстве 102, например, на потолочной консоли. В еще одном примере могут быть переданы звуковые сигналы посредством звукового интерфейса 216.
Затем на этапе 306 водитель получает указание остановить транспортное средство и воспользоваться помощью системы при осуществлении парковки. Это указание может быть направлено в визуальной и/или звуковой форме посредством того же интерфейса (интерфейсов), что и на этапе 304. После того как водитель остановит транспортное средство 102, на этапе 308 водитель получит команду убрать руки с устройства рулевого управления системы рулевого управления (например, с рулевого колеса 226) и включить устройство управления тормозами (например, педаль тормоза 212) и устройство управления передачей (например, рычаг или кнопку переключения передач) для включения или переключения передачи системы силового агрегата 214 на задний ход.
На этапе 310 система автопарковки берет на себя управление системой 224 рулевого управления для следования по траектории 116. В одном примере система автопарковки генерирует сигналы, сообщающие водителю о необходимости выполнять действия, необходимые для движения транспортного средства назад и вперед (в рамках одного или нескольких парковочных маневров) для достижения припаркованного положения транспортного средства 102 на парковочном месте 106. Припаркованное положение может быть ограничено в зависимости от характера и размеров парковочного места, например, когда транспортное средство 102 находится на определенном расстоянии от одного или нескольких объектов или конструктивных элементов, которые являются границами места, и/или под определенным углом параллельно соответствующими объектам/конструктивным элементам.
Действия, предлагаемые для выполнения водителю на этапе 308, могут включать в себя такие действия, как нажатие на педаль 212 тормоза тормозной системы 210 для регулирования скорости транспортного средства и/или включение устройства управления передачей для включения или переключения передачи системы силового агрегата 214 с передачи переднего хода на передачу заднего хода и обратно.
Как показано на этапе 312, способ может дополнительно включать в себя отображение для водителя изображения области вокруг парковочного места. Например, изображение 124 с камеры 126 заднего вида может отображаться на видео дисплее. В другом примере на дисплей 218 может быть выведен смоделированный или виртуальный вид сверху, показывающий транспортное средство и его расположение относительно парковочного места. На любое из этих изображений могут быть наложены линии и/или иные символы, изображающие предпочтительную траекторию 116 движения. В одном варианте радиолокационные системы 128 могут быть установлены спереди и/или сзади, и/или по бокам транспортного средства 102.
После того как система автопарковки определит, что транспортное средство 102 припарковано правильно, и будет завершено последнее перемещение парковочного маневра, способ переходит к этапу 314, на котором срабатывает система 220 рулевого управления и осуществляет перемещение в центральное состояние между окружающими объектами, например, транспортными средствами 108, 110, или в общем относительно бордюра 112 и/или пути 104. Этот процесс может предусматривать включение электродвигателя 224, который обеспечивает подачу питания к системе рулевого управления для перемещения рулевого колеса 226 вместе со связанными с ним компонентами до тех пор, пока колеса транспортного средства 102 не будут установлены параллельно оси 122 транспортного средства 102.
Хотя парковочное место 106 было описано как место для параллельной парковки между расположенным впереди первым объектом и расположенным сзади вторым объектом, в качестве альтернативы парковочное место может быть расположено перпендикулярно позади, например, как в стандартных парковках и гаражах на несколько транспортных средств. Кроме того, парковочное место 106 было описано как расположенное справа от транспортного средства 102, но в качестве альтернативы система автопарковки может быть использована для обнаружения парковочного места слева от транспортного средства 102.
На Фиг. 4 в способе или алгоритме 400 показаны примерные этапы, которые позволяют предотвратить наложение сигналов. Способ 400 включает в себя период 402 подачи сигнала, период 404 прослушивания (приема сигнала), период 406 вычислений и период 408 бездействия. Способ 400 показывает один цикл 410 повторяющихся периодов подачи и прослушивания сигналов для системы 412 автопарковки, системы 414 помощи при парковке задним ходом и системы 416 помощи при парковке передним ходом. Повторяющийся цикл выполняется в течение периода времени, показанного с помощью оси 418 времени.
Во время работы системы 412 автопарковки в течение периода подачи сигнала, которое в одном примере равно 1,5 мс, посылают сигнал 420 передачи системы АРА. После подачи сигнала 420 начинается отсчет периода 422 прослушивания системы АРА, который в одном примере равен 22,5 мс. После периода 422 прослушивания начинается период 424 вычислений для системы АРА, который равен, например, 14 мс, а затем - этап 426 бездействия, равный 5 мс. В это же время при выполнении цикла 410 также происходит передача, прием и выполнение вычислений для системы 414 помощи при парковке задним ходом и системы 416 помощи при парковке передним ходом.
Таким образом, в представленном примере период 428 подачи сигнала системы помощи при парковке задним ходом равен 1,5 мс, после которых начинается период 430 прослушивания сигнала для данной системы, равный 12,5 мс. Период 428 подачи сигнала и период 430 прослушивания отрегулированы так, чтобы накладываться на период 424 вычислений для системы АРА. Таким образом, вероятность детектирования во время периода 420 подачи сигнала для системы АРА отраженных сигналов, поданных во время периода 430 прослушивания системы помощи при парковке задним ходом, а также исключает вероятность детектирования во время периода 422 прослушивания излучения из периода 428 подачи сигнала. Система 414 помощи при парковке задним ходом также имеет период 432 бездействия, совпадающий с периодом 426 бездействия, равным 5 мс. Система 414 помощи при парковке задним ходом также имеет период 434 вычислений и период 436 бездействия, сумма которых совпадает с периодами 420, 422 подачи сигнала и прослушивания для системы автопарковки.
Аналогичным образом система 416 помощи при парковке передним ходом также имеет период 438 подачи сигнала, равный 1,5 мс, и период 440 прослушивания сигнала, равный 3,5 мс. Период 442 вычислений для системы 416 помощи при парковке передним ходом совпадает с периодом 434 вычислений для системы 414 помощи при парковке задним ходом. Система 416 помощи при парковке передним ходом также имеет период 444 бездействия.
Период работы системы 412 автопарковки и периоды работы систем 414, 416 помощи при парковке задним и передним ходом используются для определения расстояния до объекта с целью оценки параметров парковочного места, например, для параллельной или перпендикулярной парковки. Другими словами, как описано выше, параллельная парковка может быть выполнена с помощью системы автопарковки, а также система автопарковки может быть использована для оценки параметров парковочного места для перпендикулярной парковки или парковки под углом, когда оборудованный автомобиль или транспортное средство заезжает на парковочное место при включенной передаче переднего или заднего хода. В таких случаях расстояния до объектов определяются путем направления первого сигнала или импульса передачи от транспортного средства, например, в период 420, прослушивания первого отраженного сигнала на приемнике транспортного средства в течение периода 422 прослушивания, а также направления второго сигнала передачи от транспортного средства, например, в период 428, момент направления которого зависит от момента, когда был отправлен первый сигнал передачи в период 420. Другими словами, первое временное окно 446 включает в себя первый период 420 подачи сигнала и первый период 422 прослушивания а второй сигнал 428 направляется после завершения первого временного окна 446.
Аналогичным образом второе временное окно 448 включает в себя период 428 подачи сигнала и период 430 прослушивания. Во время периода прослушивания может быть принят отраженный сигнал, отправленный в течение периода 428. Аналогичным образом третье временное окно 450 включает в себя период 438 подачи сигнала для системы 416 помощи при парковке передним ходом и период 440 прослушивания, в течение которого может быть принят отраженный сигнал, отправленный в течение периода 438 подачи сигнала.
Периоды 422, 430 и 440 прослушивания имеют длительности, которые определяются на основании того, можно ли их использовать для выполняемых задач (система АРА, система помощи при парковке задним ходом, система помощи при парковке передним ходом), если отраженные сигналы принимаются в течение периодов, указанных выше в качестве примера. Другими словами, период ожидания системы АРА равен 22,5 мс, что является достаточно большим временным диапазоном, чтобы принять отраженные сигналы от удаленных объектов, расположенных на расстоянии, которое может соответствовать расположению парковочного места для параллельной и перпендикулярной парковки. Период 430 прослушивания для системы помощи при парковке задним ходом равен 12,5 мс, что меньше чем период 422 прослушивания для АРА 412, но больше чем период 440 прослушивания для системы 416 помощи при парковке передним ходом. Другими словами, период 430 прослушивания для системы помощи при парковке задним ходом достаточно продолжителен, так как водителю сложнее увидеть объекты, находящиеся за транспортным средством. Таким образом, предупреждение о наличии объектов, которые могут находиться за транспортным средством, выдается водителю с большим опережением. Однако период 440 прослушивания для системы 416 помощи при парковке передним ходом является относительно коротким, около 3,5 мс, поскольку объекты перед транспортным средством достаточно хорошо видны водителю, поэтому самым важным является обнаружение объектов, расположенных достаточно близко к транспортному средству, чтобы предотвратить столкновение во время парковки.
Второе временное окно 448 включает в себя период 428 подачи сигнала и период 430 прослушивания для приема отраженных сигналов от объектов. Аналогичным образом третье временное окно 450 включает в себя период 438 подачи сигнала и период 440 прослушивания для приема отраженных сигналов от объектов. Таким образом, алгоритм парковки может быть сформирован на основании периода времени между первым посылаемым сигналом и первым периодом прослушивания и на основании детектирования сигнала во время первого периода прослушивания. Для алгоритма парковки также могут быть предусмотрены входные значения от системы помощи при парковке передним ходом, системы помощи при парковке задним ходом или обеих систем на основании периодов подачи сигналов, которые могут быть приняты в течение периодов прослушивания.
Кроме того, из-за наложения периодов 402 подачи сигнала, 404 прослушивания, 406 вычисления и 408 бездействия входные значения алгоритма для системы АРА 412 определяются во время второго временного окна 448 и в течение времени после завершения прослушивания в системе АРА 412.
Предполагается, что в способе 400 может быть использовано любое устройство, которое может определить расстояние до объекта с помощью излучения и приема сигнала. Как было сказано выше, транспортное средство 102 включает в себя передатчики 114 и радиолокационные устройства 128. Однако способ 400 не ограничен ими и может быть реализован с помощью любого устройства для передачи и приема сигналов, которые позволяют определить расстояние до объекта, например, с помощью лазера или датчика монохроматического излучения. Таким образом, периоды, указанные для способа 400, являются примерами, в частности, они подходят для ультразвуковых устройств, однако в зависимости от алгоритма, размера транспортного средства и типов используемых передатчиков и датчиков данные периоды времени могут изменяться.
Кроме того, подразумевается, что моменты подачи излучаемых сигналов, могут точно управляться с помощью очень точных устройств синхронизации, например, глобальной системы позиционирования (GPS) или атомных часов. Каждое из таких устройств может быть установлено в транспортном средстве 200, следовательно, оно может быть использовано для обеспечения работы очень точных триггеров для синхронизации событий, что позволит избежать наложения событий в способе 400. В одном примере такие часы могут иметь точность, равную 200 нс. Таким образом, за счет использования управления по времени и высокой точности срабатывания триггеров во время периодов контроля импульсов детектируются различные сигналы и, если данные сигналы отражаются во время периодов прослушивания, то существует большая вероятность того, что детектированный или отраженный сигнал соответствует посылаемому сигналу. Кроме того, за счет ограничения периодов прослушивания снижается вероятность детектирования сигналов, которые были посланы излучателями, расположенными на других транспортных средствах.
Кроме того, несмотря на то, что способ 400 включает в себя временное разделение или распределение, следует понимать, что для разделения операций, выполняемых системой помощи при парковке задним ходом, системой помощи при парковке передним ходом и системой автопарковки, вместо временного разделения могут быть использованы различные частоты. Другими словами, со ссылкой на Фиг.4 можно отметить, что вместо временного разделения для различных операций, выполняемых системой 412 автопарковки, системой 414 помощи при парковке задним ходом и системой 416 помощи при парковке передним ходом, при отправке и детектировании могут быть использованы разные частоты, т.е. разделение может быть выполнено по частоте, а не при помощи временной синхронизации сигналов, как было описано выше. Обычно такие операции могут быть выполнены без изменения существующего аппаратного обеспечения. Однако в соответствии с одним вариантом изобретения для различения операций, выполняемых системой 412 автопарковки, системой 414 помощи при парковке задним ходом и системой 416 помощи при парковке передним ходом, могут быть использованы фильтры сигналов, однако для таких систем понадобится внесение изменений в существующее аппаратное обеспечение.
РАСМ 206 может включать в себя компьютер или машиночитаемый носитель информации, выполняющие способ или алгоритм 400. В общем случае такие компьютерные системы и/или устройства, как процессор и устройство ввода данных пользователем, могут использовать операционную систему, включая, но не ограничиваясь версиями и/или разновидностями ОС Microsoft Windows®; Unix (например, ОС Solaris® компании Oracle Corporation, Калифорния); AIX UNIX от компании International Business Machines, Армонк, Нью-Йорк; Linux; Mac OS X и iOS от компании Apple Inc., Купертино, Калифорния; BlackBerry OS от компании Research In Motion из Ватерлоо, Канада; а также Android от компании Open Handset Alliance.
В общем случае компьютерные устройства могут включать в себя машиночитаемые инструкции, которые могут быть выполнены одним или несколькими описанными выше вычислительными устройствами. Машиночитаемые инструкции могут быть скомпилированы или транслированы из компьютерных программ, созданных с использованием различных языков и/или технологий программирования, включая, но не ограничиваясь перечисленным, языки Java™, С, С++, Visual Basic, Java Script, Perl и т.д. или их комбинации. В общем случае процессор или микропроцессор принимает инструкции, например, из запоминающего устройства или машиночитаемого носителя информации, и выполняет эти инструкции, тем самым реализуя один или несколько процессов, например, описанных выше. Такие инструкции и другие данные могут храниться и передаваться с помощью различных машиночитаемых носителей.
Машиночитаемый носитель (сюда также относятся носители, читаемые процессором) включает в себя любые энергонезависимые носители (например, материальные носители), предоставляющие данные (например, инструкции), которые могут быть обработаны компьютером (например, процессором вычислительного устройства). Такой носитель может иметь множество форм, включая, но не ограничиваясь этим, постоянные и оперативные запоминающие устройства. Постоянными запоминающими устройствами могут быть, например, оптические или магнитные диски, а также другие виды энергонезависимых носителей. Оперативные запоминающие устройства могут представлять собой, например, динамическое оперативное запоминающее устройство (DRAM), которые обычно являются частью основного запоминающего устройства. Такие инструкции могут быть переданы с помощью одного или нескольких средств передачи данных, например, с помощью коаксиальных кабелей, медных кабелей и оптоволоконных кабелей, включая провода, которые являются частью системной шины, соединенной с процессором компьютера. Стандартными формами машиночитаемых носителей являются гибкий магнитный диск, жесткий диск, магнитная лента, любые другие виды магнитных носителей, CD-ROM, DVD, любые другие оптические носители, перфорированная лента, бумажная лента, любые другие физические носители информации с отверстиями, RAM, PROM, EPROM, FLASH-EEPROM, другие чипы или карты памяти, а также любые другие носители, с которыми может работать компьютер.
Базы данных, архивы или другие описанные хранилища данных могут включать в себя различные механизмы для хранения, доступа и чтения различных данных, например, иерархические базы данных, наборы файлов в файловой системе, базы данных приложения в соответствующем формате, реляционные системы управления базами данных (RDBMS) и т.д. Каждое такое хранилище данных обычно встроено в вычислительное устройство с операционной системой, например, одной из указанных выше, а доступ к ним осуществляется через сеть любым из известных способов. Доступ к файловой системе может быть выполнен из операционной системы, при этом такая система может поддерживать различные форматы файлов. RDBMS обычно использует язык структурированных запросов (SQL) вместе с языком создания, хранения, редактирования и выполнения сохраненных процедур, например, PL/SQL.
В некоторых примерах элементы системы могут представлять собой машиночитаемые инструкции (например, программное обеспечение) на одном или нескольких компьютерных устройствах (например, серверах, персональных компьютерах и т.д.) и могут храниться на соответствующем машиночитаемом носителе (например, дисках, запоминающих устройствах и т.д.). Компьютерная программа может состоять из таких инструкций, сохраненных на машиночитаемом носителе, для выполнения описанных функций
В отношении описанных в данном документе процессов, систем, способов, эвристических алгоритмов и т.д., следует понимать, что, несмотря на обозначенную последовательность этапов, они могут быть выполнены в другой последовательности. Также следует понимать, что некоторые этапы могут быть выполнены одновременно, а также некоторые этапы могут быть добавлены или опущены. Другими словами описания процессов представлены лишь в качестве примера вариантов осуществления изобретения и не рассматриваются как ограничение изобретения.
Таким образом, следует понимать, что описание приведено в целях наглядности, а не ограничения. Многие дополнительные варианты реализации и применения, отличные от показанных примеров, станут очевидны при ознакомлении с вышеприведенным описанием. Объем не должен быть определен на основании приведенного выше описания, но, напротив, должен быть определен на основании прилагаемой формулы изобретения наряду с полным объемом эквивалентов, для которых данная формула является основанием. Предполагается и имеется в виду, что описываемые технологии могут быть развиты и усовершенствованы в будущем, причем раскрытые системы и способы будут включены в подобные будущие варианты реализации. Таким образом, следует понимать, что применение изобретения может быть изменено и модифицировано.
Все термины, применяемые в формуле изобретения, следует понимать в их наиболее широких разумных толкованиях и их обычных значениях, как это понимают специалисты в данной области техники, если иное явно не указано в описании изобретения. В частности, использование слов «какой-либо», «данный», «вышеуказанный» и т.д. надо понимать как один или несколько указанных элементов, если в формуле не указано иное.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА НА СТОЯНКУ И СИСТЕМА ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2014 |
|
RU2638587C2 |
| СПОСОБ ОЦЕНКИ УЧАСТКА ДЛЯ ПАРКОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2670845C9 |
| СИСТЕМЫ И СПОСОБЫ ПОМОЩИ ПРИ ПАРКОВКЕ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2710505C1 |
| СПОСОБ И СИСТЕМА ПРЕДУПРЕЖДЕНИЯ О ПАРКОВОЧНОМ БАРЬЕРЕ НА ОСНОВАНИИ ИСТОРИИ ДВИЖЕНИЯ | 2016 |
|
RU2729137C2 |
| СИСТЕМА ПОМОЩИ РУЛЕНИЯ ПРИ ПАРКОВКЕ И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ | 2006 |
|
RU2412848C2 |
| СИСТЕМА СОДЕЙСТВИЯ ПАРКОВКЕ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПАРКОВКИ | 2016 |
|
RU2698603C2 |
| СПОСОБ ПОМОЩИ ПАРКОВКИ ДЛЯ УСТРОЙСТВА УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2741680C1 |
| УПРАВЛЕНИЕ ИСПОЛЬЗОВАНИЕМ ОДНОГО ПАРКОВОЧНОГО ПРОСТРАНСТВА ДЛЯ НЕСКОЛЬКИХ ТРАНСПОРТНЫХ СРЕДСТВ ПОСРЕДСТВОМ ПРИМЕНЕНИЯ МНОЖЕСТВА КАМЕР | 2013 |
|
RU2607043C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2729330C1 |
| СПОСОБ И УСТРОЙСТВО СОДЕЙСТВИЯ ПРИ ПАРКОВКЕ | 2016 |
|
RU2713960C2 |



Способ определения расстояния от транспортного средства до объекта содержит этапы, на которых: посылают первый сигнал передачи от системы помощи при парковке задним ходом в течение первого периода подачи сигнала, принимают первый отраженный сигнал в течение первого периода прослушивания, посылают второй сигнал передачи от системы помощи при парковке передним ходом после первого периода прослушивания, принимают второй отраженный сигнал в течение второго периода прослушивания и выполняют вычисления системы помощи при парковке на основании первого и второго отраженных сигналов. Решается проблема возникновения ошибок при работе датчиков, вследствие искажения их показаний. 2 н. и 12 з.п. ф-лы, 4 ил.
1. Способ определения расстояния от транспортного средства до объекта, содержащий этапы, на которых:
посылают первый сигнал передачи от системы помощи при парковке задним ходом в течение первого периода подачи сигнала,
принимают первый отраженный сигнал в течение первого периода прослушивания,
посылают второй сигнал передачи от системы помощи при парковке передним ходом после первого периода прослушивания,
принимают второй отраженный сигнал в течение второго периода прослушивания, и
выполняют вычисления системы помощи при парковке на основании первого и второго отраженных сигналов.
2. Способ по п. 1, дополнительно содержащий этапы, на которых:
определяют первое временное окно, которое состоит из первого периода подачи сигнала и первого периода прослушивания, и
посылают второй сигнал передачи после завершения первого временного окна.
3. Способ по п. 2, дополнительно содержащий этапы, на которых:
определяют входные значения для алгоритма парковки на основании первого распределения по времени между первым сигналом передачи и первым периодом прослушивания и на основании того, обнаружен ли сигнал во время первого периода прослушивания.
4. Способ по п. 3, дополнительно содержащий этапы, на которых:
определяют входные значения для алгоритма парковки по меньшей мере по одной из системы помощи при парковке передним ходом и системы помощи при парковке задним ходом на основании второго распределения по времени между вторым сигналом передачи и вторым периодом прослушивания и на основании того, обнаружен ли сигнал во время второго периода прослушивания.
5. Способ по п. 3, в котором входные значения определяют в течение второго временного окна.
6. Способ по п. 2, в котором посылка первого сигнала передачи дополнительно содержит этап, на котором посылают один из ультразвукового сигнала и радиолокационного сигнала.
7. Способ по п. 1, в котором момент передачи второго сигнала основан на одном из данных от глобальной системы позиционирования (GPS) или атомных часов.
8. Оборудованное транспортное средство, которое содержит:
первый приемопередатчик, расположенный вблизи заднего бампера,
второй приемопередатчик, расположенный вблизи переднего бампера, и
компьютер, запрограммированный: посылать первый сигнал данных подачи сигнала от первого приемопередатчика в течение первого периода подачи сигнала, в ответ на активацию педали тормоза, пока оборудованное транспортное средство находится вблизи указанного парковочного места,
принимать первый отраженный сигнал в течение первого периода прослушивания,
посылать второй сигнал данных подачи сигнала от второго приемопередатчика в течение второго периода подачи сигнала,
принимать второй отражающий сигнал во время второго периода прослушивания и
выполнять вычисления на основании первого и второго отражающих сигналов.
9. Транспортное средство по п. 8, в котором компьютер дополнительно запрограммирован на определение первого временного окна, состоящего из первого периода передачи данных и первого периода прослушивания, и на посылку второго сигнала передачи после окончания первого временного окна.
10. Транспортное средство по п. 9, в котором компьютер дополнительно запрограммирован:
определять второе временное окно, состоящее из второго периода подачи сигнала и второго периода прослушивания, причем первое временное окно больше, чем второе временное окно.
11. Транспортное средство по п. 10, в котором компьютер дополнительно запрограммирован на определение входных значений для алгоритма парковки на основании первого распределения по времени между первым сигналом передачи и первым периодом прослушивания.
12. Транспортное средство по п. 11, в котором компьютер дополнительно запрограммирован:
определять входные значения для алгоритма парковки на основании одного из первого приемопередатчика и второго приемопередатчика на основании второго распределения по времени между вторым сигналом данных подачи сигнала и вторым периодом прослушивания.
13. Транспортное средство по п. 8, в котором первый и второй приемопередатчики содержатся в комбинации по меньшей мере одного из ультразвукового передатчика и радиолокационного передатчика и по меньшей мере одного из ультразвукового приемника и радиолокационного приемника.
14. Транспортное средство по п. 8, в котором компьютер дополнительно запрограммирован:
получать доступ к точным значениям времени на основании одного из часов глобальной системы позиционирования (GPS) или атомных часов и
устанавливать триггер для времени, когда посылают второй сигнал данных подачи сигнала на основании значения точного времени.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

