Область техники, к которой относится изобретение
Изобретение относится к вспомогательным электронным системам транспортных средств, а именно к системам автоматической парковки.
Уровень техники
Система парковочного ассистента для постановки транспортных средств на стоянку в автоматическом режиме зачастую бывает основана на измерении скорости колес для точного расчета длины парковочного места, а также определения и контроля траектории для точной установки транспортного средства на парковочном месте. Однако неравномерный износ шин, использование запасных шин, давление в шинах (из-за повышенной температуры), использование колес-докаток или замена шин нормального размера без износа может сильно повлиять на систему, что не позволит выполнить точную автоматическую параллельную парковку на основании измерения скорости колес.
Раскрытие изобретения
Активная система автопарковки функционирует с использованием ультразвуковых датчиков для сканирования и обнаружения подходящего парковочного пространства для помощи водителям при постановке их транспортных средств на стоянку рядом с бордюром. Алгоритмы автопарковки выдают команды по постановке транспортного средства на стоянку на основании предполагаемых данных о колесах автомобиля, например значениях диаметров или радиусов колес. Таким образом, для улучшения системы автопарковки предложен усовершенствованный способ, в котором получают дополнительную информацию о колесах.
Способ постановки транспортного средства на стоянку включает в себя определение пройденного транспортным средством расстояния с помощью измерения длины снаружи транспортного средства, сопоставление пройденного расстояния и параметров колес транспортного средства, а также постановку транспортного средства на стоянку на основании этого сопоставления.
На энергонезависимом машиночитаемом носителе физически хранятся выполняемые компьютером инструкции по определению известного значения расстояния, которое было пройдено транспортным средством, на основании измерений расстояния снаружи транспортного средства, для сопоставления известного расстояния и параметров колес транспортного средства и для выполнения алгоритма постановки транспортного средства на стоянку на основании откалиброванного по ширине значения скорости колеса.
В другом аспекте описано оборудованное транспортное средство, которое имеет систему для измерения пройденного транспортным средством расстояния на основании эталонного значения длины снаружи транспортного средства, а также компьютер, запрограммированный на выполнение калибровки по крайней мере одного из параметров колеса транспортного средства на основании измеренной длины, а также для постановки транспортного средства на стоянку с учетом данной калибровки.
Краткое описание чертежей
На Фиг. 1 показан вид сверху транспортного средства, рядом с которым впереди и позади находятся другие транспортные средства, которые ограничивают парковочное место для осуществления автоматической парковки;
На Фиг. 2 показаны компоненты транспортного средства, связанные с выполнением автоматической парковки;
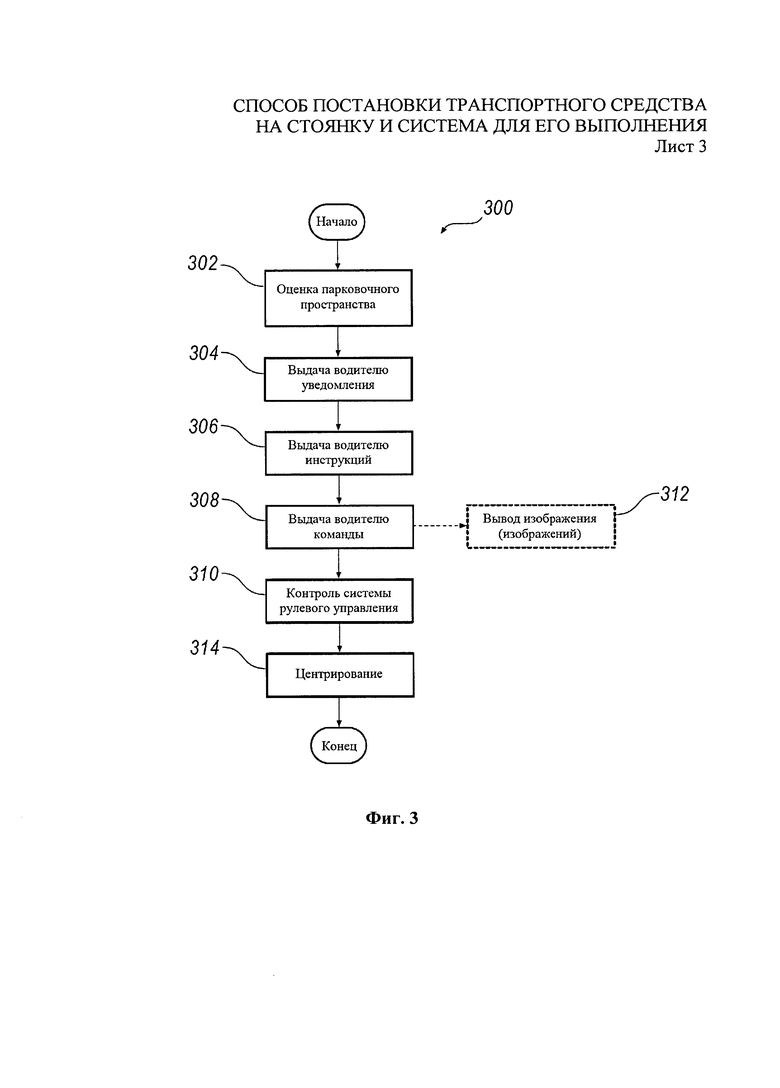
На Фиг. 3 показана логическая схема способа постановки транспортного средства на стоянку.
На Фиг. 4 показаны этапы способа работы системы автоматической парковки.
Осуществление изобретения
На Фиг. 1 показан сценарий 100 автоматической парковки, в котором проезжающее оборудованное транспортное средство 102, например легковой автомобиль, может использовать систему автопарковки для помощи водителю или его инструктирования о том, какие действия следует выполнить, чтобы припарковать транспортное средство, например, путем параллельной парковки. Когда транспортное средство 102 проходит вдоль пути 104, система автопарковки идентифицирует парковочное место 106 как пространство между двумя припаркованными транспортными средствами 108 и 110. Таким образом, парковочное место ограничено пространством между транспортными средствами 108, ПО, и оно также имеет границу на дальней стороне, например бордюр 112. Парковочное место 106 может иметь границу или быть ограничено любым типом или количеством объектов или ограничителей, необязательно транспортными средствами 108, 110 и бордюром 112.
На Фиг. 2 показано, что в транспортном средстве 102 имеется тормозная система 200, педаль 202 газа, трансмиссия 204, модуль 206 управления системой автопарковки (РАСМ) и колеса 208. Транспортное средство 102 также имеет систему 210 торможения, педаль тормоза 212, силовой агрегат 214, аудиоинтерфейс 216 и дисплей 218. В данном примере также показана система 220 рулевого управления, которая включает в себя электродвигатель 224 и рулевое колесо 226. Система рулевого управления может быть использована с усилителем, либо может представлять собой любой тип системы рулевого управления, например обычную вакуумную/гидравлическую систему, систему с электрогидравлическим усилением (EHPAS) или систему «Управление с помощью электроники». Транспортное средство 102 может содержать акселерометр, который измеряет ускорение транспортного средства 102.
В показанном варианте система 228 датчиков функционально соединена с транспортным средством 102 и может быть соединена с РАСМ 206 для направления на него входного сигнала (сигналов). Система 228 датчиков включает в себя датчики для определения параметров окружающей среды транспортного средства, например камеру 230, ультразвуковые (U/S) датчики 232 (которые могут включать в себя передатчик и датчик/приемник), радиолокатор 234 и датчик 236 рулевого управления, в качестве примеров. Хотя это не показано, система 228 датчиков может также включать в себя такие системы, как, например, лазерные локаторы, тепловые датчики и система GPS (без ограничения перечисленным). Как показано на Фиг. 1, четыре датчика 114, например ультразвуковые датчики, могут быть расположены на левой и правой сторонах транспортного средства 102 рядом с передним и задним бамперами для обеспечения полного или практически полного 360° охвата пространства вокруг транспортного средства 102. При необходимости количество, тип и/или расположение датчиков могут отличаться от показанного на схеме.
Система 228 датчиков может включать в себя датчики для определения состояния или режима работы различных бортовых систем транспортного средства 102, например датчик одометра (не показан) и/или датчик 236 угла поворота рулевого колеса. Датчики одометра могут быть расположены на одном или нескольких колесах 226 транспортного средства 102 и/или в системе 204 трансмиссии транспортного средства 102. В качестве примера датчик 236 угла поворота рулевого колеса связан с системой 220 рулевого управления транспортного средства 102 и может, например, находиться на рулевом колесе 226 или на рулевой колонке. Транспортное средство 102 может быть также оборудовано видеодисплеем 218 для отображения различных типов информации для водителя. Транспортное средство 102 также может иметь устройства 216 звукового интерфейса, например динамик, предупредительный звуковой сигнал, гудок или иное устройство для генерации звуков.
Как показано на Фиг. 1, транспортное средство 102 паркуется на парковочном месте 106 с использованием РАСМ 206. При выполнении этого маневра по крайней мере один из датчиков 114 использован для обнаружения соседних объектов и их расположения относительно положения транспортного средства 102, когда транспортное средство 102 движется по пути 104 и проезжает мимо объектов 110, 108. На Фиг. 1 в качестве соседних объектов, образующих границы парковочного места 106, показаны два припаркованных транспортного средства 110, 108 и бордюр 112. Предполагается, что РАСМ 206 может успешно обнаружить парковочное место 106 по отношению только к одному объекту или транспортному средству, например, либо транспортному средству 108, либо транспортному средству 110, если они присутствуют.
РАСМ 206 включает в себя компонент обработки данных, который обрабатывает информацию от датчика (датчиков) для оценки возможности успешно припарковать транспортное средство 102 на парковочном месте 106. Компонент обработки данных может, например, представлять собой компьютерное устройство, содержащее встроенное программное обеспечение, как известно из уровня техники. Оценка, выполняемая в РАСМ 206, может включать в себя определение возможности следования по доступной траектории 116 движения для парковки транспортного средства 102 на парковочном месте 106. При наличии доступной траектории 116 движения РАСМ 206 определит, что парковочное место может быть использовано как парковочное место. Расчеты, выполняемые РАСМ 206, могут предполагать определение подходящей длины 118 места в зависимости от таких параметров, как длина 120 транспортного средства 102 и/или возможный радиус поворота транспортного средства 102, и/или любых других геометрических параметров, связанных с транспортным средством 102 и/или другими объектами в непосредственной близости от парковочного места 106.
Движение транспортного средства 102 по траектории 116 можно осуществить посредством одного или нескольких парковочных маневров, в зависимости от необходимости, пока транспортное средство не будет правильно припарковано. В соответствии с изобретением, один парковочный маневр определяется как (1) перемещение транспортного средства задним ходом от места остановки на парковочное место, (2) остановка транспортного средства на парковочном месте, (3) перемещение транспортного средства вперед на парковочном месте и (4) последующая остановка, соответствующая завершению парковки транспортного средства. Обычно в рамках каждого этапа парковочного маневра для следования траектории 116 необходимо по крайней мере одно действие или движение системы 220 рулевого управления. Если парковочное место 106 слишком мало по сравнению с длиной транспортного средства 120 и/или радиусом поворота, может потребоваться последующее движение транспортного средства 102 назад и/или вперед, что соответствует дополнительному парковочному маневру.
После определения того, что транспортное средство 102 правильно припарковано в желаемом припаркованном положении, РАСМ 206 включает систему 220 рулевого управления с целью возвращения в центральное положение. В одном примере выполняется включение электродвигателя 224 для перемещения рулевого колеса 226 и связанных с ним компонентов системы 220 рулевого управления таким образом, чтобы управляемые ходовые колеса транспортного средства 102 были выровнены параллельно продольной (в направлении вперед-назад) оси 122 транспортного средства 102.
На схеме 300 с Фиг. 3 проиллюстрирован способ парковки транспортного средства. На первом этапе 302 модуль обработки, например РАСМ 206, определяет, есть ли возможное парковочное место для парковки транспортного средства 102. Это может быть выполнено, например, с помощью сигналов от датчика (датчиков) 114 системы 228 датчиков. Возможным парковочным местом является место (например, парковочное место 106), имеющее достаточно большие размеры, чтобы на нем можно было припарковать транспортное средство 102 с помощью системы автопарковки, которой он оборудован.
Если на этапе 302 определено, что парковочное место подходит для парковки, на этапе 304 водителю направляется уведомление или предупреждение о том, что существует возможное парковочное место. Уведомление может быть передано посредством интерфейса визуальных и/или звуковых сигналов, например выведено на дисплей 218 в транспортном средстве 102. В качестве альтернативы, визуальным интерфейсом может быть графическое изображение, значок или иное нетекстовое сообщение на дисплее 218. Такой визуальный интерфейс может быть расположен в любом подходящем месте в транспортном средстве 102, например на потолочной консоли. В еще одном примере могут быть переданы звуковые сигналы посредством звукового интерфейса 216.
Затем на этапе 306 водитель получает указание остановить транспортное средство и воспользоваться помощью системы при осуществлении парковки. Это указание может быть направлено в визуальной и/или звуковой форме посредством того же интерфейса (интерфейсов), что и на этапе 304. После того как водитель остановит транспортное средство 102, на этапе 308 водитель получит команду убрать руки с устройства рулевого управления системы рулевого управления (например, с рулевого колеса 226) и включить устройство управления тормозами (например, педаль тормоза 212) и устройство управления передачей (например, рычаг или кнопку переключения передач) для включения или переключения передачи системы силового агрегата 214 на задний ход.
На этапе 310 система автопарковки берет на себя управление системой 224 рулевого управления для следования по траектории 116. В одном примере система автопарковки генерирует сигналы, сообщающие водителю о необходимости выполнять действия, необходимые для движения транспортного средства назад и вперед (в рамках одного или нескольких парковочных маневров) для достижения припаркованного положения транспортного средства 102 на парковочном месте 106. Припаркованное положение может быть ограничено в зависимости от характера и размеров парковочного места, например, когда транспортное средство 102 находится на определенном расстоянии от одного или нескольких объектов или конструктивных элементов, которые являются границами места, и/или под определенным углом параллельно соответствующими объектам/конструктивным элементам.
Действия, предлагаемые для выполнения водителю на этапе 308, могут включать в себя такие действия, как нажатие на педаль 212 тормоза тормозной системы 210 для регулирования скорости транспортного средства и/или включение устройства управления передачей для включения или переключения передачи системы силового агрегата 214 с передачи переднего хода на передачу заднего хода и обратно.
Как показано на этапе 312, способ может дополнительно включать в себя отображение для водителя изображения области вокруг парковочного места. Например, изображение 124 с камеры 126 заднего вида может отображаться на видеодисплее. В другом примере на дисплей 218 может быть выведен смоделированный или виртуальный вид сверху, показывающий транспортное средство и его расположение относительно парковочного места. На любое из этих изображений могут быть наложены линии и/или иные символы, изображающие предпочтительную траекторию 116 движения. В одном варианте радиолокационные системы 128 могут быть установлены спереди, и/или сзади, и/или по бокам транспортного средства 102.
После того как система автопарковки определит, что транспортное средство 102 припарковано правильно, и будет завершено последнее перемещение парковочного маневра, способ переходит к этапу 314, на котором срабатывает система 220 рулевого управления и осуществляет перемещение в центральное состояние между окружающими объектами, например транспортными средствами 108, 110, или в общем относительно бордюра 112 и/или пути 104. Этот процесс может предусматривать включение электродвигателя 224, который обеспечивает подачу питания к системе рулевого управления для перемещения рулевого колеса 226 вместе со связанными с ним компонентами до тех пор, пока колеса транспортного средства 102 не будут установлены параллельно оси 122 транспортного средства 102.
Хотя парковочное место 106 было описано как место для параллельной парковки между расположенным впереди первым объектом и расположенным сзади вторым объектом, в качестве альтернативы парковочное место может быть расположено перпендикулярно позади, например, как в стандартных парковках и гаражах на несколько транспортных средств. Кроме того, парковочное место 106 было описано как расположенное справа от транспортного средства 102, но в качестве альтернативы система автопарковки может быть использована для обнаружения парковочного места слева от транспортного средства 102.
На Фиг. 4 показан алгоритм или способ 400, который иллюстрирует логику варианта реализации предложенного способа работы системы автоматической парковки. Способ 400 начинается с этапа 402, на котором происходит измерение пройденного расстояния. Пройденное расстояние определяют с использованием длины, измеренной снаружи транспортного средства, которое будет припарковано с помощью системы автоматической парковки, например, транспортного средства 102 с Фиг. 1. Измеренная длина снаружи транспортного средства может включать в себя, без ограничения перечисленным, значения, полученные от глобальной системы позиционирования GPS (которая может быть синхронизирована, например, с сотовым телефоном или смартфоном), одного или нескольких ультразвуковых (U/S) датчиков, радиолокатора, камеры и акселерометра. Точность значения длины снаружи транспортного средства может изменяться и зависит от точности измерений и других факторов, например, от диаметра колеса, скорости колеса и т.д. Например, для уменьшения погрешности измерений система GPS может быть рассчитана на измерение значений в диапазоне от 0,1 мили (0,16 км) или менее до больших расстояний в несколько миль (километров) или более. В других примерах ультразвуковая система или камера может быть рассчитана на измерение гораздо меньших расстояний и может делать это с большей точностью по сравнению, например, с системой GPS. Аналогичным образом радиолокационная система может быть использована для измерения пройденного расстояния на основании обнаруживаемых радиолокатором различных объектов. На практике этап 402 включает в себя любой способ или технологию измерения, в которой расстояние определяется с помощью длины, измеренной снаружи транспортного средства.
В соответствии с одним вариантом осуществления изобретения способ 400 включает в себя этап 404 проверки достоверности значения расстояния, измеренного на этапе 402. Проверка достоверности выполняется для упрощения определения корректности и точности пройденного расстояния. В соответствии с изобретением, проверка достоверности производится с помощью систем, которые могут включать в себя глобальную систему позиционирования (GPS), ультразвуковой датчик на транспортном средстве, акселерометр, адаптивную систему круиз-контроля (АСС), а также с помощью активации антиблокировочной тормозной системы или противобуксовочной системы. В одном варианте акселерометр измеряет ускорение в 3-мерной системе координат (по координатам x, y и z).
Обычно нежелательно выполнять калибровку измерения расстояния, когда происходит событие, нарушающее калибровку. Событием, нарушающим калибровку, называют событие, во время которого калибровка или измеренное значение длины не может считаться надежным. Например, событие, нарушающее калибровку, может быть вызвано чрезмерным ускорением или замедлением, движением по крутому склону вверх или вниз, движением по извилистой дороге или заносом транспортного средства, что, например, может быть определено с помощью описанных выше систем. В более широком смысле, событие, нарушающее калибровку, может представлять собой любое событие, которое может привести к получению сомнительных или ненадежных значений калибровки. В общем случае, в качестве альтернативы предпочтительно выполнить измерение длины для калибровки параметров колеса во время движения по ровной, практически горизонтальной дороге (например, не на холмистой местности). Таким образом, в случае наступления события, нарушающего калибровку, во время выполнения калибровки, на этапе 406 измеренное значение не будет рассматриваться как достоверное, на этапе 408 калибровка будет аннулирована, а способ управления вернется на этап 402, чтобы снова проверить возможность выполнения калибровки.
В одном примере, когда транспортное средство движется с практически постоянной скоростью, это обнаруживается с помощью РАСМ 206, после чего РАСМ 206 может инициировать измерение пройденного расстояния для выполнения калибровки параметров колеса. Это может произойти при включенной системе круиз-контроля или при движении с практически постоянной скоростью. Однако при наступлении события, нарушающего калибровку, РАСМ 206 его обнаруживает, после чего калибровка становится недостоверной. Однако если такое событие не наступает, то полученные калибровочные данные будут считаться достоверными, а на этапе 412 РАСМ 206 перейдет к сопоставлению пройденного расстояния с параметрами колеса.
Сопоставление (корреляция) может быть выполнено с использованием расстояния, измеренного, как было описано выше, которое также может быть использовано для калибровки параметров одного или всех колес транспортного средства, и компенсации каких-либо расхождений. В качестве примера параметры колеса могут включать в себя радиус колеса, диаметр колеса, периметр колеса и значение скорости колеса. Другими словами, при получении на этапе 402 известного значения расстояния и подтверждении на этапе 410 достоверности этих данных, измеренные значения, полученные от одного или нескольких колес транспортного средства, могут быть использованы для сопоставления с параметром колеса. Например, путем дополнительного измерения количества оборотов и/или скорости вращения колеса во время калибровки, расстояние, измеренное с помощью других систем (т.е. системы GPS), впоследствии может быть использовано для определения параметров колеса путем простой алгебраической калибровки (длина окружности колеса = диаметр колеса X π). Затем измеренная длина может быть преобразована с помощью количества оборотов колеса в значение параметра колеса.
Калибровка значений на этапе 402 может периодически выполняться согласно алгоритму с оповещением водителя или без него. Другими словами, поскольку РАСМ 206 может взаимодействовать с устройствами измерения расстояния (системой GPS, ультразвуковыми датчиками и т.д.) и определять наступление события, нарушающего калибровку, измерение на этапе 402 и проверка достоверности на этапе 404 могут быть выполнены в фоновом режиме без оповещения водителя. Однако в одном варианте водителю может быть выдан запрос на выполнение калибровки, а также предложено указать, если происходит событие, нарушающее калибровку, когда водитель может указать, что данные не являются достоверными, и аннулировать калибровку. Сопоставление параметра колеса может выполняться постоянно в фоновом режиме вне зависимости от обнаружения условий для калибровки, в данном случае калибровка может использоваться всякий раз, когда полученные данные определяются как достоверные.
После завершения сопоставления параметра колеса этот параметр колеса может быть сопоставлен с характеристиками транспортного средства. Например, полученное значение параметра колеса может указывать на то, что колесо имеет неприемлемые характеристики или что на транспортном средстве установлено неподходящее колесо. Например, давление может быть низким, на транспортном средстве может быть установлена неоригинальная шина (или запасная шина), на месте одного или нескольких колес транспортного средства может быть установлено колесо-докатка, либо одна или несколько шин может быть изношена. В таком случае водителю может быть выдано уведомление или оповещение об обнаруженных условиях работы. Кроме того, в соответствии с одним вариантом изобретения при сомнительном результате сопоставления вместо использования сопоставления, основанного на сомнительном значении пройденного расстояния, могут быть использованы параметры колеса по умолчанию.
Во время автоматической парковки на этапе 414 может быть обнаружено парковочное место, а на этапе 416 может быть определена траектория движения (например, траектория 116 движения, описанная выше). После этого происходит получение траектории 116 движения, основанной на сопоставлении параметра колеса, а на этапе 418 для водителя генерируются инструкции, позволяющие выполнить парковку.
РАСМ 206 может включать в себя компьютер или машиночитаемый носитель информации, выполняющие способ или алгоритм 400. В общем случае такие компьютерные системы и/или устройства, как процессор и устройство ввода данных пользователем, могут использовать операционную систему, включая, но не ограничиваясь версиями и/или разновидностями ОС Microsoft Windows®; Unix (например, ОС Solaris® компании Oracle Corporation, Калифорния); AIX UNIX от компании International Business Machines, Армонк, Нью-Йорк; Linux; Mac OS X и iOS от компании Apple Inc., Купертино, Калифорния; BlackBerry OS от компании Research In Motion из Ватерлоо, Канада; а также Android от компании Open Handset Alliance.
В общем случае компьютерные устройства могут включать в себя машиночитаемые инструкции, которые могут быть выполнены одним или несколькими описанными выше вычислительными устройствами. Машиночитаемые инструкции могут быть скомпилированы или транслированы из компьютерных программ, созданных с использованием различных языков и/или технологий программирования, включая, но не ограничиваясь перечисленным, языки Java™, С, С++, Visual Basic, Java Script, Perl и т.д. или их комбинации. В общем случае процессор или микропроцессор принимает инструкции, например, из запоминающего устройства или машиночитаемого носителя информации и выполняет эти инструкции, тем самым реализуя один или несколько процессов, например, описанных выше. Такие инструкции и другие данные могут храниться и передаваться с помощью различных машиночитаемых носителей.
Машиночитаемый носитель (сюда также относятся носители, читаемые процессором) включает в себя любые энергонезависимые носители (например, материальные носители), предоставляющие данные (например, инструкции), которые могут быть обработаны компьютером (например, процессором вычислительного устройства). Такой носитель может иметь множество форм, включая, но не ограничиваясь этим, постоянные и оперативные запоминающие устройства. Постоянными запоминающими устройствами могут быть, например, оптические или магнитные диски, а также другие виды энергонезависимых носителей. Оперативные запоминающие устройства могут представлять собой, например, динамическое оперативное запоминающее устройство (DRAM), которое обычно является частью основного запоминающего устройства. Такие инструкции могут быть переданы с помощью одного или нескольких средств передачи данных, например, с помощью коаксиальных кабелей, медных кабелей и оптоволоконных кабелей, включая провода, которые являются частью системной шины, соединенной с процессором компьютера. Стандартными формами машиночитаемых носителей являются гибкий магнитный диск, жесткий диск, магнитная лента, любые другие виды магнитных носителей, CD-ROM, DVD, любые другие оптические носители, перфорированная лента, бумажная лента, любые другие физические носители информации с отверстиями, RAM, PROM, EPROM, FLASH-EEPROM, другие чипы или карты памяти, а также любые другие носители, с которыми может работать компьютер.
Базы данных, архивы или другие описанные хранилища данных могут включать в себя различные механизмы для хранения, доступа и чтения различных данных, например иерархические базы данных, наборы файлов в файловой системе, базы данных приложения в соответствующем формате, реляционные системы управления базами данных (RDBMS) и т.д. Каждое такое хранилище данных обычно встроено в вычислительное устройство с операционной системой, например одной из указанных выше, а доступ к ним осуществляется через сеть любым из известных способов. Доступ к файловой системе может быть выполнен из операционной системы, при этом такая система может поддерживать различные форматы файлов. RDBMS обычно использует язык структурированных запросов (SQL) вместе с языком создания, хранения, редактирования и выполнения сохраненных процедур, например PL/SQL.
В некоторых примерах элементы системы могут представлять собой машиночитаемые инструкции (например, программное обеспечение) на одном или нескольких компьютерных устройствах (например, серверах, персональных компьютерах и т.д.) и могут храниться на соответствующем машиночитаемом носителе (например, дисках, запоминающих устройствах и т.д.). Компьютерная программа может состоять из таких инструкций, сохраненных на машиночитаемом носителе, для выполнения описанных функций.
В отношении описанных в данном документе процессов, систем, способов, эвристических алгоритмов и т.д., следует понимать, что, несмотря на обозначенную последовательность этапов, они могут быть выполнены в другой последовательности. Также следует понимать, что некоторые этапы могут быть выполнены одновременно, а также некоторые этапы могут быть добавлены или опущены. Другими словами описания процессов представлены лишь в качестве примера вариантов осуществления изобретения и не рассматриваются как ограничение изобретения.
Таким образом, следует понимать, что описание приведено в целях наглядности, а не ограничения. Многие дополнительные варианты реализации и применения, отличные от показанных примеров, станут очевидны при ознакомлении с вышеприведенным описанием. Объем не должен быть определен на основании приведенного выше описания, но, напротив, должен быть определен на основании прилагаемой формулы изобретения наряду с полным объемом эквивалентов, для которых данная формула является основанием. Предполагается и имеется в виду, что описываемые технологии могут быть развиты и усовершенствованы в будущем, причем раскрытые системы и способы будут включены в подобные будущие варианты реализации. Таким образом, следует понимать, что применение изобретения может быть изменено и модифицировано.
Все термины, применяемые в формуле изобретения, следует понимать в их наиболее широких разумных толкованиях и их обычных значениях, как это понимают специалисты в данной области техники, если иное явно не указано в описании изобретения. В частности, использование слов «какой-либо», «данный», «вышеуказанный» и т.д. надо понимать как один или несколько указанных элементов, если в формуле не указано иное.



Изобретение относится к вспомогательным электронным системам транспортных средств, а именно к системам автоматической парковки. Способ постановки транспортного средства на стоянку заключается в том, что выполняют калибровку значения скорости колеса транспортного средства на основании измеренной длины снаружи транспортного средства и паркуют транспортное средство на основании откалиброванного значения скорости колеса. Обеспечивается автоматическая парковка с дополнительной информацией о колесах. 3 н. и 11 з.п. ф-лы, 4 ил. 
1. Способ постановки транспортного средства на стоянку, в котором:
получают данные об измеренной длине, характеризующей расстояние, пройденное транспортным средством;
после чего в случае, если имеет место условие для нарушения калибровки, включая чрезмерное ускорение или замедление, аннулируют данные об измеренной длине;
а в случае отсутствия указания на такое условие сопоставляют пройденное расстояние с параметром колеса транспортного средства; и
на основании результатов сопоставления ставят транспортное средство на место стоянки.
2. Способ по п. 1, в котором параметр колеса транспортного средства представляет собой радиус колеса, диаметр колеса, периметр колеса или скорость колеса.
3. Способ по п. 2, в котором на основании значения параметра колеса транспортного средства дополнительно проверяют, является ли по крайней мере одно из колес транспортного средства колесом-докаткой, имеет ли оно низкое давление в шине, является ли оно изношенным или запасным колесом.
4. Способ по п. 3, в котором в случае обнаружения неприемлемых значений параметра колеса генерируют предупреждение.
5. Способ по п. 3, в котором в случае обнаружения неприемлемых значений параметра колеса аннулируют результаты сопоставления.
6. Блок управления транспортным средством, обеспечивающий выполнение следующих операций:
получение данных об измеренной длине, представляющей расстояние, пройденное транспортным средством;
аннулирование данных об измеренной длине, если имеет место условие для нарушения калибровки, включая чрезмерное ускорение или замедление;
определение расстояния, пройденного транспортным средством, с помощью измеренной длины снаружи транспортного средства,
а в случае отсутствия указания на такое условие сопоставление пройденного расстояния с параметром колеса транспортного средства; и
выполнение алгоритма постановки транспортного средства на стоянку на основании результата сопоставления.
7. Блок управления транспортным средством по п. 6, в котором параметр колеса представляет собой радиус колеса, диаметр колеса, периметр колеса или/и значение скорости колеса и в котором выполняемые компьютером инструкции также обеспечивают выполнение процессором проверки на основании значения параметра колеса транспортного средства, является ли по крайней мере одно из колес транспортного средства колесом-докаткой, имеет ли оно низкое давление в шине, является ли оно изношенным или запасным колесом.
8. Блок управления транспортным средством по п. 7, в котором в случае обнаружения неприемлемых значений параметра колеса выполняемые компьютером инструкции также обеспечивают выполнение процессором генерации предупреждения.
9. Блок управления транспортным средством по п. 7, в котором в случае обнаружения неприемлемых значений параметра колеса выполняемые компьютером инструкции также обеспечивают выполнение процессором аннулирования результатов сопоставления.
10. Транспортное средство, которое включает в себя:
блок управления, выполненный с возможностью:
получать данные об измеренной длине, представляющей расстояние, пройденное транспортным средством;
после чего в случае, если имеет место условие для нарушения калибровки, включая чрезмерное ускорение или замедление, аннулируют данные об измеренной длине;
а в случае отсутствия указания на такое условие сопоставляют пройденное расстояние с параметром колеса транспортного средства, и
ставить транспортное средство на стоянку с учетом результатов сопоставления.
11. Транспортное средство по п. 10, в котором параметр колеса транспортного средства представляет собой радиус колеса, диаметр колеса, периметр колеса или скорость колеса.
12. Транспортное средство по п. 11, в котором блок управления дополнительно запрограммирован на выполнение проверки на основании значения параметра колеса транспортного средства, является ли по крайней мере одно из колес транспортного средства колесом-докаткой, имеет ли оно низкое давление в шине, является ли оно изношенным или запасным колесом.
13. Транспортное средство по п. 12, в котором блок управления дополнительно запрограммирован на генерацию предупреждения в случае обнаружения неприемлемых значений параметра колеса.
14. Транспортное средство по п. 12, в котором блок управления дополнительно запрограммирован на аннулирование результатов сопоставления в случае обнаружения неприемлемых значений параметра колеса.
| US6061002 A1, 09.05.2000 г | |||
| US2009071227 A1, 19.03.2009 г | |||
| US2013024103 A1, 24.01.2013 г | |||
| DE3622447 C1, 28.01.1988 г. |

