Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях обзора и управления воздушным движением, а также в других когерентных РЛС, работающих в условиях пассивных помех, вызванных отражениями от местных предметов, метеообразований, подстилающей поверхности.
Обзорные когерентно-импульсные РЛС излучают радиоимпульсы с определенным периодом повторения с помощью вращающейся антенной системы в окружающее пространство.
После излучения импульса происходит переключение на прием отраженных сигналов. Принятые отраженные сигналы с помощью когерентного гетеродина переносятся на промежуточную частоту, далее оцифровываются с помощью аналого-цифрового преобразователя (АЦП), и с помощью цифрового квадратурного смесителя переносятся на нулевую частоту. Далее фильтруются цифровыми фильтрами нижних частот и поступают на дальнейшую обработку с частотой дискретизации не менее чем в два раза превышающую ширину спектра зондирующих импульсов.
Далее цифровые сигналы сжимаются цифровым сжимающим фильтром (например, согласованным фильтром) и подвергаются межпериодной обработке, заключающейся в том, что для каждого цифрового отсчета по дальности формируется вектор, компонентами которого являются отсчеты отраженного сигнала с этого же элемента дальности в предыдущие периоды повторения. Количество элементов этого вектора - это конструктивный параметр, который зависит от ширины диаграммы направленности антенны, скорости ее вращения, периода повторения зондирующих импульсов.
Обработка таких векторов для каждого элемента дальности и есть межпериодная обработка. В результате этой обработки осуществляется обнаружение целей и оценка их координат.
Известен алгоритм оптимального обнаружения дискретного сигнала на фоне гауссовских помех с известной ковариационной матрицей K [1]:

где:
 - вектор опорного сигнала
- вектор опорного сигнала 
 - эрмитово-транспонированный вектор;
- эрмитово-транспонированный вектор;
 - ковариационная матрица помехи;
- ковариационная матрица помехи;
 - сформированный вектор входного сигнала;
- сформированный вектор входного сигнала;
N - число элементов сформированного вектора (размер обрабатываемой пачки импульсов);
ƒd - доплеровская частота цели;
ti - моменты появления импульсов пачки;
 - мнимая единица;
- мнимая единица;
Dn(ti-tN/2) - амплитуда диаграммы направленности антенны в момент времени ti;
с - порог обнаружения.
Амплитуда отраженного от цели сигнала пропорциональна квадрату амплитуды диаграммы направленности антенны.
Заметим, что непосредственно реализовать этот алгоритм нельзя, так как неизвестна доплеровская частота цели, и поэтому невозможно сформировать вектор S0, а также неизвестна корреляционная матрица пассивной помехи K.
В существующих импульсно-доплеровских РЛС применяют многоканальную обработку по частоте Доплера. То есть в каждом канале обработки опорный сигнал настраивается на определенную частоту Доплера. Обнаружение цели в каждом доплеровском канале происходит независимо друг от друга.
Известен способ обнаружения движущейся цели на фоне пассивных помех, основанный на подавлении пассивной помехи либо устройствами череспериодного вычитания, либо режекторными гребенчатыми фильтрами [2].
При регулярном периоде повторения зондирующих импульсов основным недостатком данного способа обнаружения является эффект слепых скоростей (подавление движущейся цели с доплеровской частотой, близкой к нулю, даже при отсутствии пассивных помех).
Так как при обработке не учитываются характеристики помехи, то наблюдается низкая эффективность этого метода обработки.
Известен способ обнаружения движущейся цели на фоне пассивных помех, основанный на фильтрации сформированного вектора путем его взвешивания во временной области весовыми распределениями специального вида [3].
Недостаток этого метода заключается в том, что из-за взвешивания расширяется спектр сформированного вектора и возникают потери в отношении сигнал/шум и, следовательно, уменьшается вероятность правильного обнаружения.
Кроме того, метод не подходит для обзорной РЛС с низкой частотой повторения, так как число импульсов, попавших в раствор диаграммы направленности антенны при ее вращении, мало, и из-за расширения спектра уменьшается число доплеровских каналов не забитых помехой.
Основным недостатком данного способа является его низкая эффективность, обусловленная отсутствием алгоритма обработки, учитывающего характеристики пассивных помех.
Известен способ межпериодной обработки [4], в котором обработка строится следующим образом. На входе отраженные сигналы, представленные своими цифровыми квадратурными составляющими, подвергаются многоканальной доплеровской фильтрации и многоканальному когерентному накоплению в процессоре дискретного преобразования Фурье (ДПФ,) на выходе которого вычисляются огибающие, которые нормируются, объединяются и подаются на порог обнаружения, причем вычисление весовых коэффициентов для многоканальной доплеровской фильтрации осуществляется предварительно для выбранной заранее формы спектра флюктуаций пассивной помехи. В данном способе коррекция частотных характеристик при многоканальной доплеровской фильтрации производится с учетом близкой к реальности пассивной помехи, имеющей, например, гауссов спектр.
Известный способ заключается в том, что алгоритм (1) представляется в виде:

где W=K-1⋅S - вектор весовых коэффициентов для многоканальной доплеровской фильтрации,
K-1 - обратная корреляционная матрица для предварительно заданной модели пассивной помехи и хранящаяся в постоянном запоминающем устройстве,
S=(1, ej2π⋅n/N, ej2π⋅2n/N, …, ej2π⋅(N-1)/N) - вектор опорного сигнала для цели, доплеровская частота которой попадает в n-й доплеровский канал,
N - число импульсов в пачке.
Так как корреляционная матрица помехи неизвестна, используется подход, заключающийся в том, что для различных моделей пассивных помех заранее рассчитываются корреляционные матрицы и вычисляются весовые коэффициенты, которые хранятся в памяти.
В процессе функционирования РЛС в реальном масштабе времени производится оценка модуля и фазы коэффициента межпериодной корреляции помехи и на ее основе из запоминающего устройства выбираются весовые коэффициенты, корректируются, и осуществляется обработка по алгоритму (2).
Недостатком этого способа является то, что вид корреляционной матрицы помехи по оценке модуля и фазы коэффициента межпериодной корреляции определяется с большой погрешностью.
В качестве прототипа заявляемого объекта изобретения принят способ адаптивного обнаружения движущихся целей на фоне многокомпонентных пассивных помех [5], включающий в себя многоканальную доплеровскую фильтрацию с многоканальным когерентным накоплением в виде преобразования Фурье, результат которого подвергается вычислению огибающих, которые нормируются и объединяются с выделением максимального значения, при этом для операции многоканальной доплеровской фильтрации и многоканального когерентного накопления в виде преобразования Фурье весовые коэффициенты вычисляют в реальном масштабе времени векторным перемножением оценок коэффициентов авторегрессии и коэффициентов преобразования Фурье. [6]. Причем с порогом обнаружения сравнивается на выходе в каждом элементе дальности максимум от нескольких максимумов огибающих сигналов, полученных при обработке каждой пачки эквидистантных импульсов с разными частотами повторения или несущими частотами, изменяемыми от пачки к пачке.
Известный способ межпериодной обработки заключается в том, что пассивная помеха аппроксимируется в виде процесса авторегрессии, а обратная корреляционная матрица в (1) представляется в виде разложения на диагональную Р, верхнюю и нижнюю треугольные матрицы коэффициентов авторегрессии А:
K-1=A⋅P⋅AT.
Это справедливо, если корреляционная матрица пассивных помех теплицева.
В процессе функционирования РЛС в реальном масштабе времени по сформированному вектору X вычисляются коэффициенты авторегрессии по алгоритму Берга [6] и вектор весовых коэффициентов W=K-1⋅S.
S=(1, ej2π⋅n/N, ej2π⋅2n/N, …, ej2π⋅(N-1)/N) - вектор опорного сигнала.
Далее идет обработка в соответствии с алгоритмом (2).
Недостаток этого метода заключается в том, что в обзорных РЛС сформированный вектор X модулирован диаграммой направленности антенны. Поэтому корреляционная матрица пассивных помех для обзорных РЛС не является теп лицевой.
Кроме того, так как оценки коэффициентов авторегрессии усредняются по смежным элементам дальности, то метод может работать только для протяженных по дальности помех. Для помех в виде отражений от местных предметов (сосредоточенных отражателей), усреднение приведет к ошибкам в оценке коэффициентов авторегрессии, так как усредняться будут данные, не содержащие отсчетов помехи.
Техническим результатом, на решение которого направлено изобретение, является повышение эффективности обнаружения целей за счет адаптивной обработки отраженных сигналов РЛС, которая приближается по своим характеристикам к теоретически оптимальной обработке, на фоне как протяженных, так и сосредоточенных помех при любой частоте повторения импульсов и с учетом формы диаграммы направленности антенны.
Технический результат достигается за счет предлагаемого способа адаптивной обработки сигналов в обзорных когерентно-импульсных радиолокационных станциях, включающих формирование вектора для каждого цифрового отсчета по дальности, компонентами которого являются отсчеты отраженного сигнала с этого же элемента дальности в предыдущие периоды повторения. Входной вектор данных разбивают на m блоков длиной n элементов, а каждый блок данных фильтруют системой n ортогональных фильтров, энергию результата на выходе фильтров вычисляют, усредняют от обзора к обзору и запоминают в n картах помех для каждого элемента дальности и азимута, выходы фильтров нормируют данными из карт помех в предыдущий момент обзора.
1. Для учета доплеровского приращения частоты движущейся цели, выходы фильтров корректируют с учетом характеристик фильтров и формы диаграммы направленности антенны, результаты обработки блоков входного вектора данных из n элементов объединяют в результирующий вектор из m*n=N элементов и когерентно накапливают с помощью алгоритма быстрого преобразования Фурье, затем вычисляют квадрат модуля спектра, который сравнивают с порогом обнаружения в каждом доплеровском канале.
2. В том случае, если измерять доплеровскую частоту цели не надо, то вычисляют квадрат модуля выходов фильтров каждого блока, нормируют квадратным многочленом от данных карты помех в предыдущий момент обзора, суммируют результаты обработки всех блоков и сравнивают с порогом обнаружения.
При таком способе обработки фиксирован уровень ложных тревог, как при наличии помех, так и при их отсутствии.
В предлагаемом изобретении способ межпериодной обработки основывается на другом представлении обратной корреляционной матрицы пассивных помех.
Представим алгоритм (1) в эквивалентном виде:

В покомпонентной записи этот алгоритм имеет вид:

Здесь применено разложение корреляционной матрицы помехи по собственным векторам (Ψ - матрица, столбцы которой есть собственные вектора корреляционной матрицы помехи). D - диагональная матрица собственных значений.
diag(D)=[μ0, μl, …, μN-l].
Ψk={ψi,k} - этот вектор можно интерпретировать как импульсную характеристику k-того фильтра. Импульсные характеристики фильтров являются ортогональными.
Собственные значения μk - это дисперсия помехи на выходе k-того фильтра.
Таким образом, μk можно получить в процессе функционирования РЛС:

Здесь m - текущий номер обзора, n - общее число обзоров, по которым осуществляется усреднение. То есть оценку μk получают за несколько периодов обзора с одного и того же элемента дальности и азимута, соответствующего первому элементу вектора у (y0).
Выражение, стоящее в правой части формулы (4) можно интерпретировать как фильтр текущего среднего:

Так как этот фильтр является фильтром нижних частот, то его можно заменить фильтром с такой же полосой пропускания, но более простым в вычислительном отношении:

Параметр α выбирается в диапазоне 0…1 (обычно α=1/n).
Здесь  - обучающий вектор помехи, получаемый на m-ном обзоре в процессе функционирования РЛС.
- обучающий вектор помехи, получаемый на m-ном обзоре в процессе функционирования РЛС.
Совокупность собственных значений представляет собой разложение дисперсии помехи с помощью ортогональных фильтров.
Собственные векторы ортогональны и составляют базис N-мерного пространства.
Это значит, что любой вектор X может быть разложен по элементам базиса.
По-существу в РЛС осуществляется разложение входного вектора по элементам базиса.
Движущаяся цель и пассивные помехи имеют разное разложение по элементам базиса, причем разложение пассивных помех можно запомнить в картах помех, которые однозначно идентифицируются по номеру дальности и азимута. Это различие и используется для обнаружения цели.
Заметим, что пассивные помехи в каждом элементе дальности можно представить в виде произведения квадрата диаграммы направленности антенны на отражения от местных предметов или других пассивных отражателей. Корреляционная функция отражений описана в литературе [7] и во многих случаях может быть аппроксимирована экспоненциальной зависимостью.
На основании этого, вид собственных векторов корреляционной матрицы пассивных помех может быть вычислен заранее, а собственные значения вычисляются адаптивно для каждого углового направления и элемента дальности в процессе функционирования РЛС по выражению (5).
1. Модернизируем алгоритм (3) следующим образом: разобьем входной вектор на блоки длины n, так, чтобы m*n=N, и запишем алгоритм (3) в виде:

Здесь:
μk,p и Ψk,p - собственные значения и собственные векторы корреляционной матрицы блока помехи 
Обозначим:

Тогда

Здесь wi,p - результат фильтрации от пассивных помех блока входных данных (xn⋅p, …, x(n+1)⋅p-1);  - объединение векторов wi,p.; z(L) - результат когерентной обработки отфильтрованных данных.
- объединение векторов wi,p.; z(L) - результат когерентной обработки отфильтрованных данных.
Заметим, что величины  вычислены заранее и хранятся в памяти по адресу, который определяется номером р блока данных xn⋅p, …, x(n+1)⋅p-1 и номером k.
вычислены заранее и хранятся в памяти по адресу, который определяется номером р блока данных xn⋅p, …, x(n+1)⋅p-1 и номером k.
Величины μk,p вычисляются в процессе функционирования РЛС по алгоритму (5) и записываются в память по адресу, который определяется номером дальности, номером азимута первого отсчета в блоке данных xn⋅p, …, x(n+1)⋅p-1 и номером k.
Блок-схема обработки приведена на фиг. 1.
2. Алгоритм обработки без измерения доплеровского сдвига частоты цели имеет вид:
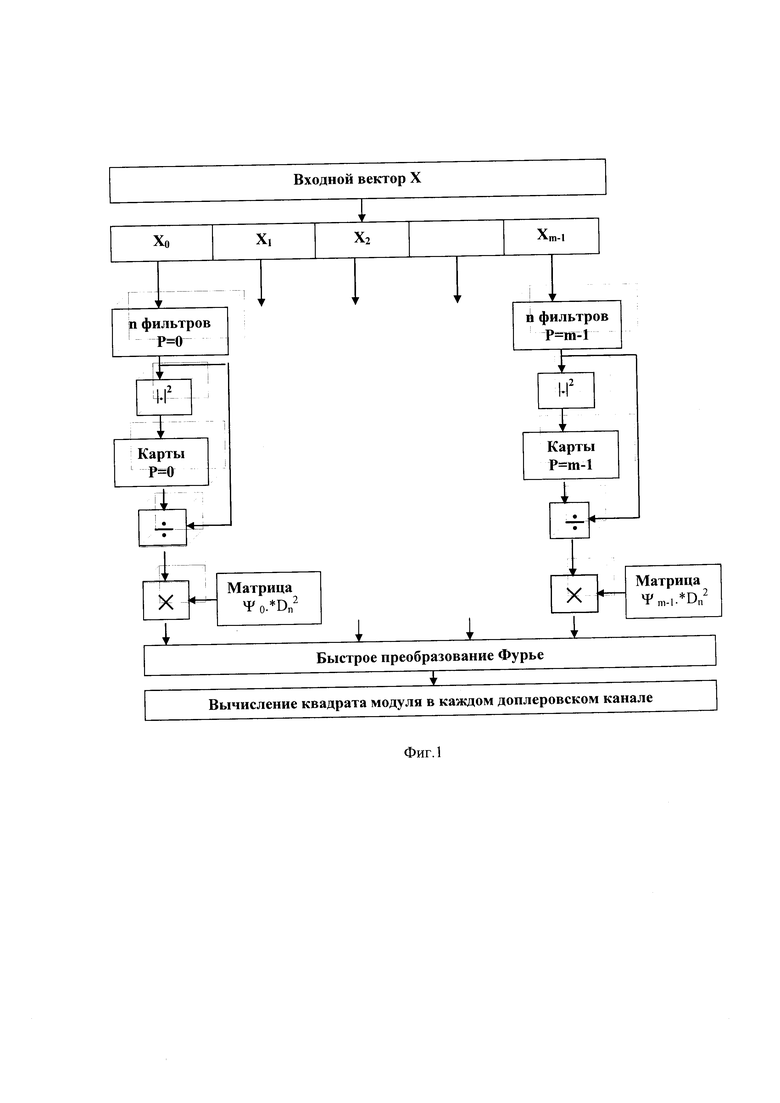
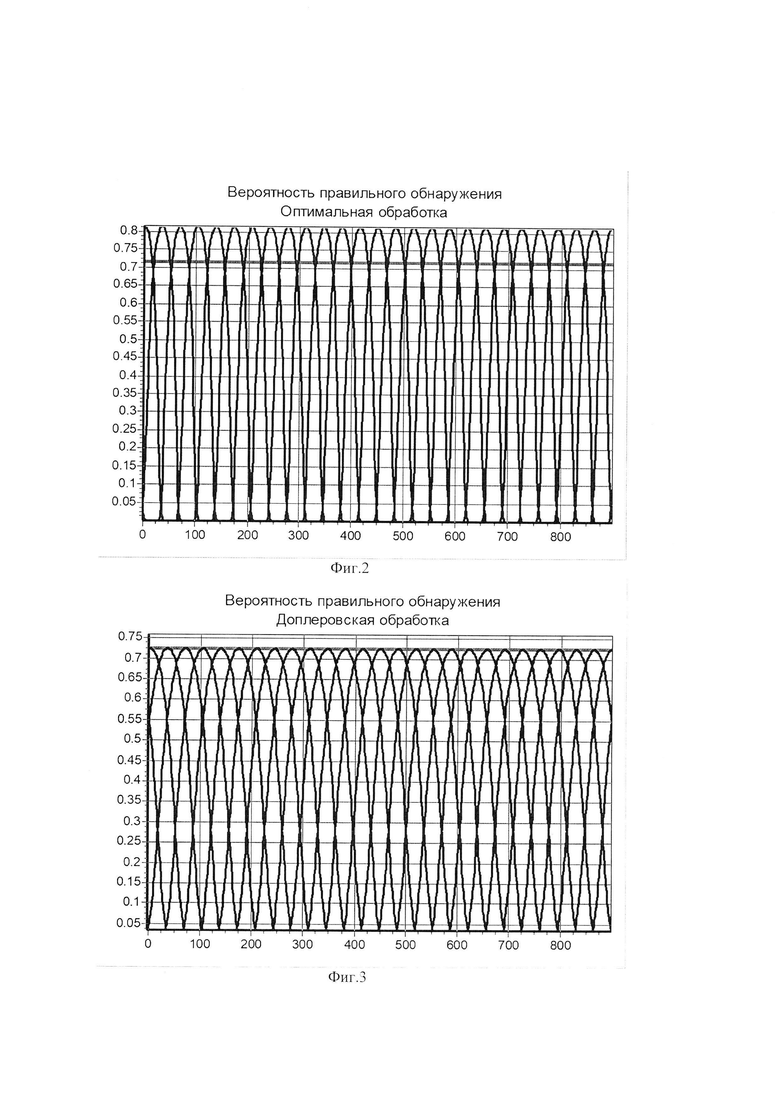
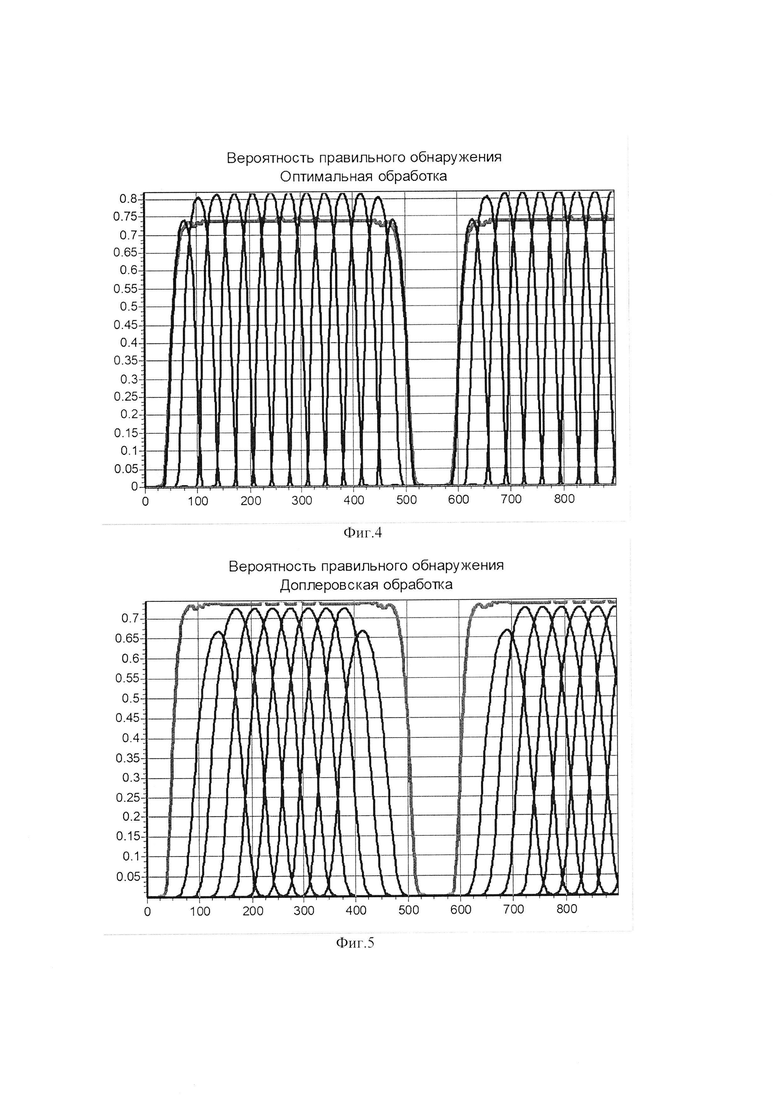
На фиг. 2-10 Приведены рабочие характеристики обнаружения этих способов обработки (зависимость вероятности правильного обнаружения от частоты Доплера входного сигнала), при следующих исходных данных:
Размерность входного вектора N=16, число блоков m=1, 2, 4, период повторения 1811 мкс, ширина диаграммы направленности антенны 2.5 град., время обзора 4.6 с, вероятность ложной тревоги 10-3, отношение сигнал/шум=17 дБ, отношение помеха/сигнал=34 дБ или помеха отсутствует. Помеха с гауссовским спектром шириной 3 Гц. Ортогональные фильтры рассчитаны с учетом диаграммы направленности антенны вида sin(x)/x и в предположении помехи с гауссовским спектром шириной 1 Гц.
Для сравнения приведены также рабочие характеристики обнаружения доплеровской обработки без окна и с окном Наттолла.
На фиг. 2 Вероятность правильного обнаружения. Оптимальная обработка. Помех нет, m=1, n=16; m=2, n=8; m=4, n=4. Сплошная линия - без измерения частоты Доплера. На фиг. 3 Вероятность правильного обнаружения. Доплеровская обработка. Помех нет. Окно Наттолла. Сплошная линия - без измерения частоты Доплера.
На фиг. 4 Вероятность правильного обнаружения. Оптимальная обработка. Отношение помеха/сигнал=34 дБ, m=1, n=16. Сплошная линия - без измерения частоты Доплера.
На фиг. 5 Вероятность правильного обнаружения. Доплеровская обработка. Окно Наттолла. Отношение помеха/сигнал=34 дБ. Сплошная линия - без измерения частоты Доплера.
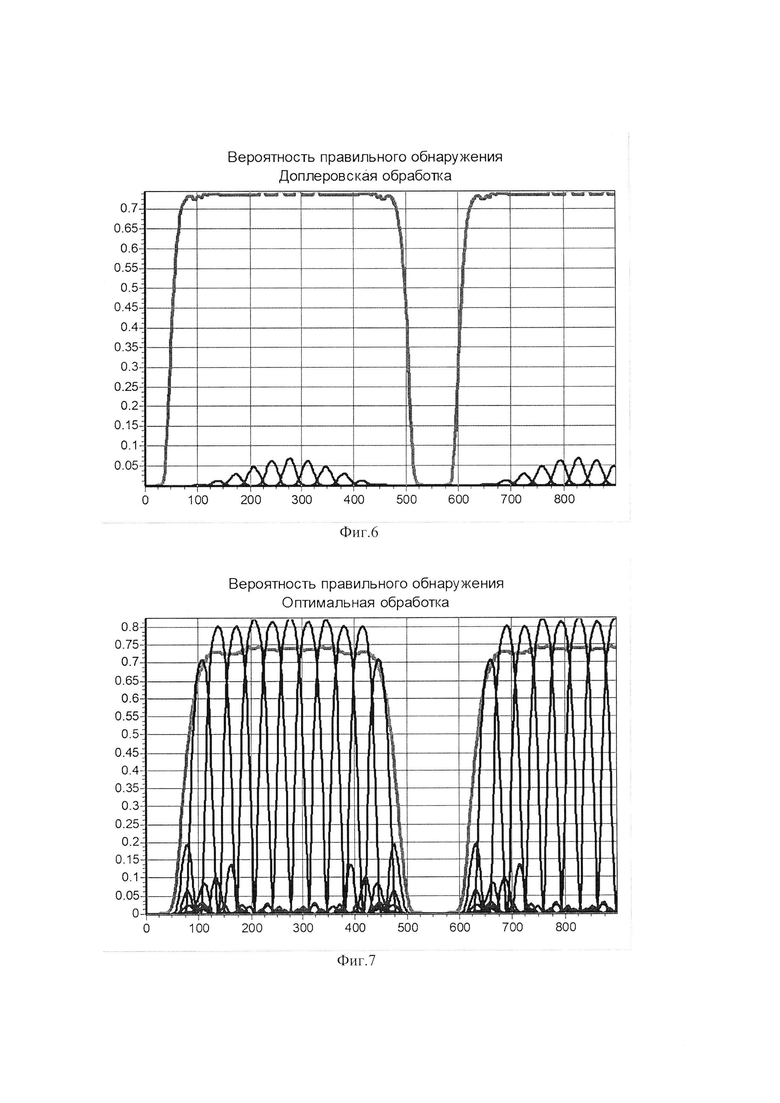
На фиг. 6 Вероятность правильного обнаружения. Доплеровская обработка. Без оконной обработки. Отношение помеха/сигнал=34 дБ. Сплошная линия - без измерения частоты Доплера.
На фиг. 7 Вероятность правильного обнаружения. Оптимальная обработка, m=2, n=8. Отношение помеха/сигнал=34 дБ. Сплошная линия - без измерения частоты Доплера.
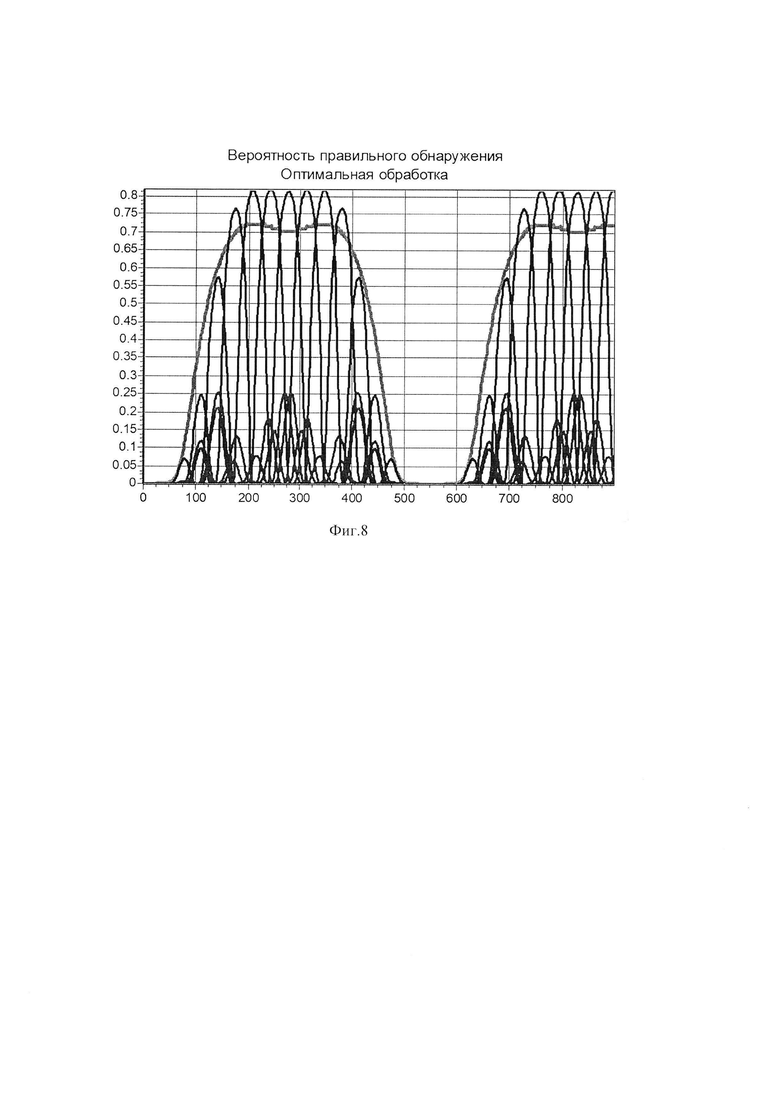
На фиг. 8 Вероятность правильного обнаружения. Оптимальная обработка, m=4, n=4. Отношение помеха/сигнал=34 дБ. Сплошная линия - без измерения частоты Доплера.
Расчет рабочих характеристик осуществлялся по методике, описанной в [8].
Применение предлагаемого изобретения позволяет повысить эффективность обнаружения целей за счет адаптивной обработки отраженных сигналов РЛС, которая приближается по своим характеристикам к теоретически оптимальной обработке, на фоне как протяженных, так и сосредоточенных помех при любой частоте повторения импульсов и с учетом формы диаграммы направленности антенны.
Источники информации, принятые во внимание:
1. Левин Б.Р. Теоретические основы статистической радиотехники. - М.: «Радио и связь», 3-е издание, 1989.
2. Бакулев П.А., Сосновский А.А. Радиолокационные и радионавигационные системы, М.: Радио и связь, 1994.
3. Патент РФ №2594005, МПК G01S 13/04, пр. 01.09.2015.
4. Патент США №4742353, МПК G01S 13/86, пр. 03.05.1988.
5. Патент РФ №2593146, МПК G01S 7/36, пр. 14.07.2015
6. Марпл-МЛ С.Л. Цифровой спектральный анализ. - М.: «Мир», 1990.
7. Справочник по радиолокации под ред. М.И. Сколника. Т. 3. - М.: "Сов. Радио". 1979.
8. Родионов В.В. Помехоустойчивость адаптивных импульсно-доплеровских обнаружителей движущихся целей на фоне пассивных помех. // Антенны, вып. 1 (200), 2014, стр. 23-29.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОГО ОБНАРУЖЕНИЯ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ МНОГОКОМПОНЕНТНЫХ ПАССИВНЫХ ПОМЕХ | 2015 |
|
RU2593146C1 |
| Способ селекции движущихся целей | 2022 |
|
RU2820302C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2015 |
|
RU2593276C1 |
| СПОСОБ КЛАССИФИКАЦИИ И БЛАНКИРОВАНИЯ ДИСКРЕТНЫХ ПОМЕХ | 2018 |
|
RU2710894C1 |
| СПОСОБ КЛАССИФИКАЦИИ И БЛАНКИРОВАНИЯ ДИСКРЕТНЫХ ПОМЕХ | 2015 |
|
RU2599870C1 |
| Способ определения дальности и радиальной скорости цели импульсно-доплеровской радиолокационной станцией | 2023 |
|
RU2807331C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| Способ пространственно-временной адаптивной обработки сигналов в моноимпульсной корабельной радиолокационной станции с активной фазированной антенной решеткой | 2018 |
|
RU2735216C2 |
| СПОСОБ ФОРМИРОВАНИЯ ФИКСИРОВАННОЙ СПЕКТРАЛЬНОЙ ЗОНЫ, СВОБОДНОЙ ОТ ПОМЕХ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ В БОРТОВЫХ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАТОРАХ | 2023 |
|
RU2834733C1 |
Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях (РЛС) обзора и управления воздушным движением, а также в других когерентных РЛС, работающих в условиях пассивных помех, вызванных отражениями от местных предметов, метеообразований, подстилающей поверхности. Достигаемый технический результатом - повышение эффективности обнаружения целей. Указанный результат достигается за счет адаптивной обработки сигналов в обзорных когерентно-импульсных РЛС, включающей формирование вектора для каждого цифрового отсчета по дальности, компонентами которого являются отсчеты отраженного сигнала с этого же элемента дальности в предыдущие периоды повторения, при этом входной вектор данных разбивают на m блоков длиной n элементов, при этом каждый блок данных фильтруют системой ортогональных фильтров, дисперсию помех на выходе фильтров вычисляют и запоминают в n картах помех для каждого элемента дальности и азимута, выходы фильтров нормируют данными соответствующих карт помех в предыдущий момент обзора, для учета доплеровского приращения частоты движущейся цели, выходы фильтров корректируют с учетом характеристик фильтров и формы диаграммы направленности антенны, результаты обработки блоков входного вектора данных объединяют и когерентно накапливают с помощью алгоритма быстрого преобразования Фурье, затем вычисляют квадрат модуля спектра, который сравнивают с порогом обнаружения в каждом доплеровском канале. В том случае, если измерять доплеровскую частоту цели не надо, то вычисляют квадрат модуля выходов фильтров каждого блока, нормируют квадратным многочленом от данных карты помех в предыдущий момент обзора, суммируют результаты обработки всех блоков и сравнивают с порогом обнаружения. 2 н.п. ф-лы, 8 ил.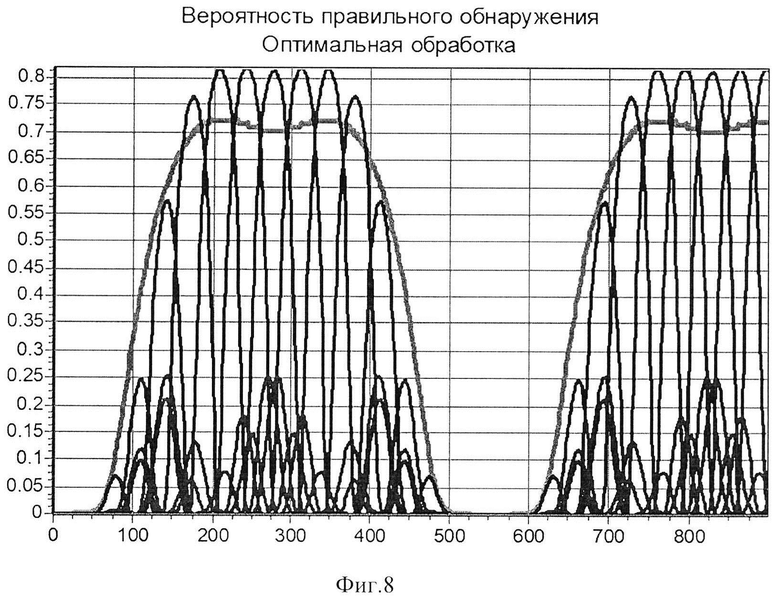
1. Способ адаптивной обработки сигналов в обзорных когерентно импульсных радиолокационных станциях, включающий формирование вектора для каждого цифрового отсчета по дальности, компонентами которого являются отсчеты отраженного сигнала с этого же элемента дальности в предыдущие периоды повторения, отличающийся тем, что входной вектор данных разбивают на m блоков длиной n элементов, при этом каждый блок данных фильтруют системой ортогональных фильтров, дисперсию помех на выходе фильтров вычисляют и запоминают в n картах помех для каждого элемента дальности и азимута, выходы фильтров нормируют данными соответствующих карт помех в предыдущий момент обзора, для учета доплеровского приращения частоты движущейся цели, выходы фильтров корректируют с учетом характеристик фильтров и формы диаграммы направленности антенны, результаты обработки блоков входного вектора данных объединяют и когерентно накапливают с помощью алгоритма быстрого преобразования Фурье, затем вычисляют квадрат модуля спектра, который сравнивают с порогом обнаружения в каждом доплеровском канале.
2. Способ адаптивной обработки сигналов в обзорных когерентно импульсных радиолокационных станциях, включающий формирование вектора для каждого цифрового отсчета по дальности, компонентами которого являются отсчеты отраженного сигнала с этого же элемента дальности в предыдущие периоды повторения, отличающийся тем, что входной вектор данных разбивают на m блоков длиной n элементов, при этом каждый блок данных фильтруют системой ортогональных фильтров, дисперсии помех на выходе фильтров вычисляют и запоминают в n картах помех для каждого элемента дальности и азимута, квадрат модуля выходов фильтров каждого блока, нормируют квадратным многочленом от данных соответствующих карт помех в предыдущий момент обзора, суммируют результаты обработки всех блоков и сравнивают с порогом обнаружения.
| СПОСОБ АДАПТИВНОГО ОБНАРУЖЕНИЯ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ МНОГОКОМПОНЕНТНЫХ ПАССИВНЫХ ПОМЕХ | 2015 |
|
RU2593146C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС | 2015 |
|
RU2594005C1 |
| Устройство для определения номера шелковой пряжи | 1930 |
|
SU21770A1 |
| СПОСОБ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ, СПОСОБ ФУНКЦИОНИРОВАНИЯ ОБЗОРНОЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В РЕЖИМЕ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337373C1 |
| WO 2003023436 A2, 20.03.2003 | |||
| JP 2005207932 A, 04.08.2005 | |||
| US 6650271 B1, 18.11.2003. | |||

