Изобретение относится к области навигации и может быть использовано для определения координат объекта надводного судна.
Известен способ определения расстояний от объекта до источника излучения электромагнитного поля, включающий прием на объекте антенной радиоприемника сигналов электромагнитного поля, измерение радиоприемником параметра принимаемого сигнала (амплитуды, фазы, частоты) и вычисление по полученным данным расстояния от объекта до источника электромагнитного поля [1, 2].
Фазовый и частотный способы определения расстояний от объекта до источника обладают наибольшей точностью [1, 2]. Для определения расстояний этими способами используется одна из следующих зависимостей или их модификаций:

где D - расстояние между станцией и объектом;
V - скорость распространения радиоволн;
τ, φ - время запаздывания принимаемого сигнала относительно нормированного и его фаза;
ω0 - круговая частота нормированного сигнала нормированного генератора.
На точность измерений, как следует из формул (1), влияет нестабильность скорости распространения радиоволн в среде, радиодевиация, а также изменение во времени частоты и фазы нормированного генератора.
Известен [1, 2] также бортовой радиоприемник для осуществления способа определения расстояний между объектом и источником излучаемого электромагнитного поля, содержащий антенное устройство, приемоизмерительный блок, блок управления, блок определения расстояния от объекта до источника излучения электромагнитного поля и регистратор, при этом антенное устройство через приемоизмерительный блок соединено с блоком управления, выход которого подключен к входу блока определения расстояния от объекта до источника излучения электромагнитного поля, выход которого подключен к регистратору.
Основным недостатком известных способа и радиоприемника является невысокая точность, обусловленная нестабильностью частоты нормированного генератора, которая является эталонным значением при измерениях фазово-частотных изменений принимаемых сигналов, изменения скорости распространения электромагнитного поля от влияния среды и девиации принимаемого сигнала. В настоящее время обеспечить требуемую стабильность работы нормированного генератора не представляется возможным. В результате погрешность определения расстояния от объекта до источника электромагнитного поля при использовании известных способа и радиоприемника достигает десятки метров [1, 2].
Целью заявляемого изобретения является повышение точности определения расстояния от объекта до источника электромагнитного поля.
Указанная цель достигается тем, что в известном способе определения расстояния от объекта до источника электромагнитного поля, включающем прием на объекте антенной радиоприемника сигналов электромагнитного поля, излучаемого источником, измерение параметра принимаемого сигнала и вычисление по полученным данным искомого расстояния от объекта до источника электромагнитного поля, принимают на объекте сигналы магнитной составляющей электромагнитного поля двумя параллельными дипольными антеннами, расположенными в горизонте на концах базы заданной длины, поворачивают базу в горизонте в положение, при котором осуществляется прием равных максимальных амплитуд сигналов антеннами, одновременно измеряют амплитуду принимаемых сигналов каждой антенной, расстояние между центрами антенн и определяют промежутки времени между тремя последовательно измеренными экстремальными значениями амплитуд сигналов, принимаемых каждой антенной.
Поставленная цель достигается также тем, что в известном радиоприемнике, содержащем антенное устройство, блок управления, приемоизмерительный блок, блок определения расстояния от объекта до источника излучения электромагнитного поля и регистратор, при этом антенное устройство соединено с приемоизмерительным блоком, выход которого через блок управления подключен к входу блока определения расстояния от объекта до источника излучения электромагнитного поля, выход которого подключен к входу регистратора, антенное устройство выполнено в виде жесткой базы заданной длины, на концах которой закреплены параллельные дипольные антенны, а на базе установлен измеритель расстояния между центрами данных антенн, база закреплена на стабилизированной в горизонте платформе с возможностью вращения базы в горизонте введенным механизмом вращения, при этом выходы данных антенн соединены с приемоизмерительным блоком, выход блока управления дополнительно соединен с входом механизма вращения, а измеритель расстояния между центрами антенн через блок управления соединен с блоком определения расстояния от объекта до источника излучения электромагнитного поля, выход которого соединен с входом измерителя расстояния между центрами антенн.
Пример выполнения заявляемого изобретения.
На фиг.1 показан способ определения расстояния от объекта до источника электромагнитного поля.
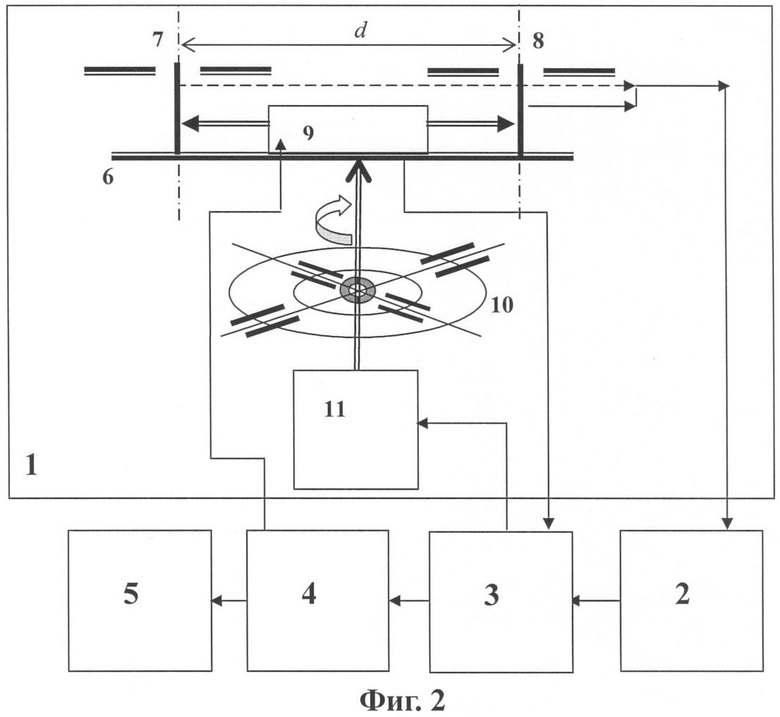
На фиг.2 приведена структурная блок-схема заявленного радиоприемника.
Заявленный способ реализуется радиоприемником, структурная блок-схема которого показана на фиг.2. Радиоприемник содержит антенное устройство 1, приемоизмерительный блок 2, блок управления 3, блок 4 определения расстояния от объекта до источника излучения электромагнитного поля, регистратор 5. При этом антенное устройство 1 соединено с приемоизмерительным блоком 2, выход которого через блок управления 3 подключен к входу блока 4 определения расстояния от объекта до источника излучения электромагнитного поля, выход которого подключен к входу регистратора 5.
Антенное устройство выполнено в виде жесткой базы 6 заданной длины, на концах которой закреплены параллельные дипольные антенны 7 и 8, например ферритовые, а на базе установлен измеритель 9 расстояния d между центрами антенн. Измеритель 9 расстояния между центрами антенн может быть выполнен в виде длинной линии (ЛБВ - линия бегущей волны), концы которой соединены с центрами антенн 7 и 8. База 6 закреплена на стабилизированной в горизонте платформе, в качестве которой использован карданов подвес 10, с возможностью вращения базы в горизонте в подшипниковом соединении, расположенном в центре карданова подвеса, с помощью механизма вращения 11. Выходы антенн 7 и 8 соединены с приемоизмерительным блоком 2, выход блока управления 3 соединен с входом механизма вращения 11, а выход измерителя 9 расстояния между центрами антенн 7 и 8 соединен через блок управления 3 с входом блоком 4 определения расстояния от объекта до источника излучения электромагнитного поля, а выход блока 4 соединен с входом измерителя 9 расстояния между центрами антенн.
Радиоприемник работает следующим образом.
Параллельные дипольные антенны 7 и 8 принимают магнитную составляющую источника электромагнитного поля С, изображенного на фиг.1. Магнитная составляющая электромагнитного поля обладает векторными свойствами, которое проявляется в измеренном сигнале (электрическая составляющая электромагнитного поля этим свойством не обладает). Прямая, соединяющая в сигнале магнитной составляющей центр развертки с его амплитудным значением, отображает в пространстве вектор, соединяющий источник магнитного поля и его приемник [2]. Угол пространственного смещения амплитуды сигнала А от его центра характеризует фазовый угол амплитуды сигнала [3].
Электрические сигналы, образованные в антеннах 7 и 8, поступают в приемоизмерительный блок 2. В приемоизмерительном блоке 2 измеряются амплитуды принятых сигналов антеннами 7 и 8 и определяется разностный сигнал, поступающий через блок управлении 3 в антенный блок 1 на вход механизма вращения 11. Механизм вращения 11 выполнен, например, в виде сельсина, который поворачивает в горизонте базу 6 в положение, обеспечивающее максимальные значения амплитуд сигналов, принимаемых антеннами 7 и 8, относительное отличие которых находилось в пределах 0,1÷0,2 друг от друга. Это условие обеспечивается ориентацией базы антенного устройства приемника в горизонте и по направлению на антенну источника электромагнитного поля с погрешностью порядка ±6°-10°.
При использовании двух антенн исключаются погрешности, обусловленные изменением влияния окружающей среды на распространение электромагнитных волн, так как из-за относительно небольшого расстояния между центрами антенн 7 и 8, изменения влияния среды на них происходят одновременно, и при вычислении разности оказываемых воздействий их изменение не проявляется. Это позволяет реализовать относительную разрешающую способность приемных устройств по амплитуде, соизмеримую с относительной разрешающей способностью по частоте.
Блок управления 3 может быть реализован в виде микропроцессора, обеспечивающего ввод-вывод информации от нескольких датчиков, например микропроцессоров семейства AVR фирмы АТМЕС.
В блоке управления 3 выделяют моменты времени:
- максимальных амплитуд принимаемых сигналов,
- импульсов, характеризующих расстояния между центрами антенн.
Кроме того, в блоке 3 по специальной программе вырабатываются электрические сигналы для управления механизмом вращения 11 и подачи импульса нормированной частоты из блока 4 определения расстояния от объекта до источника излучения электромагнитного поля на измеритель 9 расстояния между центрами антенн 7 и 8.
Импульс нормированной частоты с блока 4 определения расстояния от объекта до источника поступает на измеритель 9 расстояния между центрами антенн. Измеритель 9 расстояния в виде длинной линии обеспечивает задержку по времени импульса сигнала нормированной частоты, равный расстоянию между центрами антенн 7 и 8. Первый и задержанный импульсы через блок управления 3 поступают в блок 4 для определения расстояния d между центрами антенн в единицах частоты нормированного генератора.
При равенстве максимальных амплитуд принимаемых сигналов сигналы из приемоизмерительного блока 2 и измерителя 9 расстояния между центрами антенн 7 и 8 поступают через блок управления 3 в блок 4 определения расстояния от объекта до источника излучения. Данный блок 4 выполнен на основе Х-86 системы ЭВМ.
В блоке 4 определения расстояния от объекта до источника излучения выделяют моменты времени трех последовательных экстремальных значений амплитуд и вычисляют по специальной программе в единицах нормированной скважности генератора Δ промежутки времени между экстремальными значениями амплитуд в одинаковой и противоположной фазе и размер расстояния N между центрами антенн. Затем определяется расстояние L от объекта до источника электромагнитного поля по формуле:

где N - расстояние между центрами антенн 7 и 8, выраженное в единицах нормированной скважности и определяет масштабный коэффициент измерений;
N1, N2 - промежутки времени между экстремальными значениями амплитуд в одинаковой фазе для сигналов с различных антенн, выраженное в единицах нормированной скважности Δ;
ΔN1, ΔN2 - промежутки времени между экстремальными значениями амплитуд в противоположной фазе для сигналов с различных антенн, выраженные в единицах нормированной скважности Δ.
Промежуток времени между двумя экстремальными значениями, находящимися в одной фазе, характеризует период сигнала (T), а находящимися в противоположных фазах, характеризует удвоенную оценку результата сдвига фазы (ΔT).
Для вычисления L по формуле (1) в радиоприемнике измеряются следующие функциональные параметры: N, N1, N2, ΔN1, ΔN2 и амплитуда сигналов А, служащая аргументом. Масштабный коэффициент измерений N определяет отношение двух параметров: длины базы d, выраженной в метрах, и частоты Δ, каждый из которых не стабилен во времени. Текущая оценка их отношений обеспечивает независимость масштабного коэффициента от изменений этих двух параметров во времени. Поэтому требование к временной стабильности частоты нормированного генератора в блоке 4 определяется только временем между тремя последовательными экстремальными значениями сигнала, равным 1,5 периодам принимаемого сигнала. Это свойство обеспечивает возможность существенно упростить радиоприемник, так как требование к стабильности частоты его нормированного генератора практически отсутствует.
N1, N2, ΔN1, ΔN2 являются частями периода принимаемого сигнала источника электромагнитного поля, заключенными между экстремальными значениями амплитуд сигналов.
А - амплитуда принимаемого сигнала источника электромагнитного поля, по экстремальным оценкам которой определяют период и его части.
Уравнение (1) является линейной функцией двух переменных N1, ΔN1 и N2 ΔN2 от аргумента А. N является квазипостоянным измеряемым масштабным коэффициентом. Оценку точности определения расстояния между объектом и источником электромагнитного поля L можно произвести в соответствии с теорией погрешностей [4] по следующей формуле:

где ε(L) - относительная погрешность определения расстояния L;
ε(N) - относительная погрешность определения расстояния N между центрами антенн 7 и 8;
ε(N1)=ε(N2) - относительная погрешность определения промежутков времени N1, N2 и ΔN1, ΔN2 принимаемых сигналов;
ε(А) - относительная погрешность определения экстремального значения амплитуды принимаемого сигнала А;
ΔA, А - разрешающая способность (чувствительность) измерения амплитуды и амплитуда сигнала А соответственно.
Абсолютную погрешность m(L) определения расстояния L в соответствии с теорией погрешности можно определить по формуле:

Оценим относительные погрешности измерения составляющих уравнения (2) для случая использования:
- известного нормированного генератора [5], имеющего скважность Δ=10-15 с (длина волны λ0=0,3 мкн, частота которого равна f0=1015 Гц);
- при разрешающей способности измерения амплитуды ΔA=10-6 B при амплитуде сигнала А=10 В относительная погрешность ее определения составит ε(А)=10-7 [2];
- при расстоянии между центрами антенн 7 и 8 d=3 м относительная погрешность ее определения ε(N) составит: ε(N)=10-7;
- при длине волны источника электромагнитного поля в λ=3 м значения ε(N1) составит 10-7, а при λ=3000 м, ε(N1)=10-10.
Тогда относительная погрешность определения расстояния L при использовании длин волн источников электромагнитного поля от λ=3÷3000 м составит ε(L)=10-7, а абсолютная погрешность m(L) определения расстояния L для расстояния L=300 км составит 0,03 м, а для расстояния L=3000 км составит 0,3 м.
Таким образом, заявляемые способ и устройство повышают точность измерения расстояний L от объекта до источника электромагнитного поля по сравнению с прототипом на порядок и более.
Физическая сущность заявленного способа для определения расстояния от объекта до источника электромагнитного поля, показана на фиг.1. Расстояние от объекта до источника электромагнитного поля определяют по произведению базы N на сумму вычисленных котангенсов углов, прилегающих к базе, вычисленных по проекциям магнитной составляющей электромагнитного поля на ось времени.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ и устройство определения расстояний между объектом и источником электромагнитного поля, включающие измерение магнитной составляющей сигнала электромагнитного поля двумя параллельными дипольными антеннами, расположенными в горизонте на концах базы заданной длины, поворачивая базу в горизонте в положение, при котором осуществляется прием равных максимальных амплитуд сигналов антеннами, при одновременном измерении амплитуд принимаемых сигналов каждой антенной, расстояния между центрами антенн и промежутков времени между тремя последовательно измеренными экстремальными значениями амплитуд сигналов, принимаемых каждой антенной.
В радиоприемнике антенное устройство для осуществления способа выполнено в виде жесткой базы заданной длины, на концах которой закреплены параллельные дипольные антенны, на базе установлен измеритель расстояния между центрами данных антенн, база закреплена на стабилизированной в горизонте платформе с возможностью вращения базы в горизонте введенным механизмом вращения, при этом выходы данных антенн соединены с приемоизмерительным блоком, выход блока управления дополнительно соединен с входом механизма вращения, а измеритель расстояния между центрами антенн через блок управления соединен с блоком определения расстояния от объекта до источника излучения электромагнитного поля, выход которого соединен с входом измерителя расстояния между центрами антенн.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций и устройство для его осуществления повышает точность измерения расстояний от объекта до источника электромагнитного поля.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы стандартные устройства, оборудование и приспособления, используемые для измерения электромагнитных полей.
Технико-экономическая эффективность заявленного способа и устройства заключается в возможности увеличения на порядок точности определения расстояния от объекта до источника электромагнитного поля.
Использованная литература
1. В.А.Михальский. Определение места корабля с помощью радионавигационных систем. - Л.: ВОК ВМФ, 1979, - 170 с.
2. A.M.Байрашевский и др. Судовая радиоэлектроника и радионавигационные приборы. - М.: Транспорт, 1988, - 271 с.
3. С.Н Гузевич. Стереоскопическая модель измерений расстояний в радиотехнических системах. // Радиотехника. Информационно-измерительные и управляющие системы. - 2007, №1, с.4-9.
4. И.Н.Бронштейн, К.А.Семендяев Справочник по математике для инженеров и учащихся ВТУЗОВ. - М.: Наука. 1981 г. - 719 с.
5. А.Б.Басевич и др. Состояние и перспективы создания квантовых стандартов частоты. // 2-ая Всероссийская конференция «Фундаментальное и прикладное координатно-временное обеспечение (КВНО-2007), с.110-111.

Изобретение относится к области навигации и может быть использовано для определения расстояний между различными объектами по измеряемым параметрам электромагнитного поля во всем частотном спектре. Достигаемый технический результат - повышение точности измерения расстояния от объекта до источника электромагнитного поля. Указанный результат достигается за счет того, что в заявленном способе принимают на объекте сигналы магнитной составляющей электромагнитного поля двумя параллельными дипольными антеннами, расположенными в горизонте на концах базы заданной длины, поворачивают базу в горизонте в положение, при котором осуществляется прием максимальных амплитуд сигналов антеннами, одновременно измеряют амплитуду принимаемых сигналов каждой антенной, расстояние между центрами антенн и определяют промежутки времени между тремя последовательно измеренными максимальными значениями амплитуд сигналов, принимаемых каждой антенной. Заявленное устройство содержит антенное устройство, блок управления, приемоизмерительный блок, блок определения расстояния от объекта до источника излучения электромагнитного поля и регистратор, соединенные определенным образом между собой, антенное устройство выполнено в виде жесткой базы заданной длины, на концах которой закреплены параллельные дипольные антенны, а на базе установлен измеритель расстояния между центрами данных антенн, база закреплена на стабилизированной в горизонте платформе с возможностью вращения базы в горизонте введенным механизмом вращения. 2 н.п. ф-лы, 2 ил.
1. Способ определения расстояния от объекта до источника электромагнитного поля, включающий прием на объекте сигналов электромагнитного поля, излучаемого источником, отличающийся тем, что принимают на объекте сигналы магнитной составляющей электромагнитного поля двумя параллельными дипольными антеннами, расположенными в горизонте на концах базы заданной длины, поворачивают базу в горизонте в положение, при котором осуществляется прием равных максимальных значений амплитуд сигналов антеннами, одновременно измеряют амплитуду сигналов, принимаемых каждой антенной, расстояние между центрами антенн и определяют промежутки времени между тремя последовательно измеренными максимальными значениями амплитуд сигналов, принимаемых каждой антенной, затем определяют расстояние L
L=N·(N1+N2/ΔN1-ΔN2),
где N - расстояние между центрами антенн, выраженное в единицах нормированной скважности Δ, определяет масштабный коэффициент измерений,
N1, N2 - промежутки времени между максимальными значениями амплитуд в одинаковой фазе для сигналов с двух антенн, выраженные в единицах нормированной скважности Δ,
ΔN1, ΔN2 - промежутки времени между максимальными значениями амплитуд в противоположных фазах для сигналов с двух антенн, выраженные в единицах нормированной скважности Δ,
причем промежуток времени между двумя максимальными значениями, находящимися в одной фазе, характеризует период сигнала Т, а находящимися в противоположных фазах, характеризует удвоенную оценку сдвига фазы ΔT.
2. Радиоприемник для осуществления способа по п.1, содержащий антенное устройство, блок управления, приемоизмерительный блок, блок определения расстояния от объекта до источника излучения электромагнитного поля и регистратор, при этом блок определения расстояния от объекта до источника излучения электромагнитного поля подключен к входу регистратора, отличающийся тем, что антенное устройство выполнено в виде жесткой базы заданной длины, на концах которой закреплены параллельные дипольные антенны, а на базе установлен измеритель расстояния между центрами данных антенн, база закреплена на стабилизированной в горизонте платформе с возможностью вращения базы в горизонте введенным механизмом вращения, при этом выходы антенн соединены с приемоизмерительным блоком, предназначенным для измерения амплитуд принятых антеннами сигналов, поступающих на блок управления для выделения моментов времени максимальных и равных значений амплитуд сигналов, передаваемых в блок определения расстояния от объекта до источника излучения электромагнитного поля для оценки промежутков времени между выделенными значениями амплитуд сигналов с помощью генератора нормированной частоты и подачи нормированной частоты в измеритель расстояния между центрами антенн для оценки расстояния между ними в единицах нормированной частоты в выделенные моменты времени.
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА С ПОДВИЖНОГО НАБЛЮДАТЕЛЯ | 1998 |
|
RU2155933C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА С ПОДВИЖНОГО НАБЛЮДАТЕЛЯ | 1995 |
|
RU2104486C1 |
| US 6111536 A, 29.08.2000 | |||
| US 4905009 A, 27.02.1990 | |||
| WO 2008080739 A1, 10.07.2008. | |||

