Предпосылки к созданию изобретения
Настоящее изобретение имеет отношение к способу реконструирования порывов ветра и/или нагрузок на конструкцию летательного аппарата, в частности пассажирского самолета.
До настоящего времени можно было только в ограниченной степени производить обратный расчет внешних воздействий, таких как порывы ветра или турбулентность, которые могут приводить к повышению нагрузок на конструкцию в любом месте летательного аппарата, в частности пассажирского самолета. Само собой разумеется, что динамические нагрузки могли быть измерены, однако невозможно было предугадать возмущение или воздействие.
Сущность изобретения
Задачей настоящего изобретения является создание способа, при помощи которого возможно моделирование нагрузок на конструкцию самолета и реконструкция их возбуждения. В частности, предлагается способ, который может быть осуществлен как после полета, так и, в частности, во время полета.
Эта задача решена при помощи способа в соответствии с настоящим изобретением.
Преимущество способа в соответствии с настоящим изобретением заключается в том, что он позволяет производить быстрые оценки того, следует или нет производить особые проверки и/или ремонт в результате приложения нагрузок от порывов ветра и/или маневров в ограниченной области, или в результате других воздействий. Эта возможность обеспечивает повышенные стандарты безопасности, снижает до минимума время нахождения на земле и эксплуатационные расходы и одновременно повышает степень готовности самолета.
Примерные варианты способа в соответствии с настоящим изобретением объясняются далее со ссылкой на чертежи.
Краткое описание чертежей
На фиг.1 показана блок-схема способа реконструирования порывов ветра и/или нагрузок на конструкцию самолета в соответствии с настоящим изобретением при помощи блока наблюдения в соответствии с примерным вариантом настоящего изобретения.
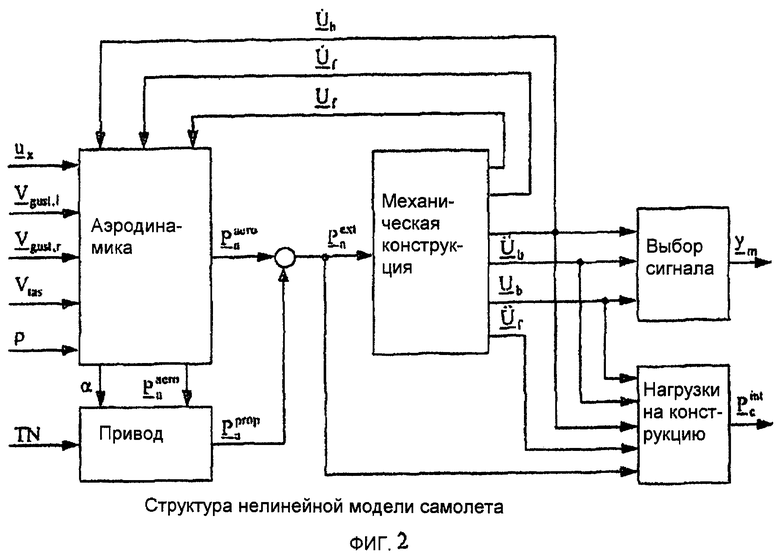
На фиг.2 показана блок-схема нелинейной модели самолета, которая является основой блока наблюдения в соответствии с примерным вариантом настоящего изобретения, показанного на фиг.1.
На фиг.3 показана блок-схема, аналогичная показанной на фиг.1, где можно видеть, как соответствующие параметры, использованные в блоке наблюдения, локализованы на самолете.
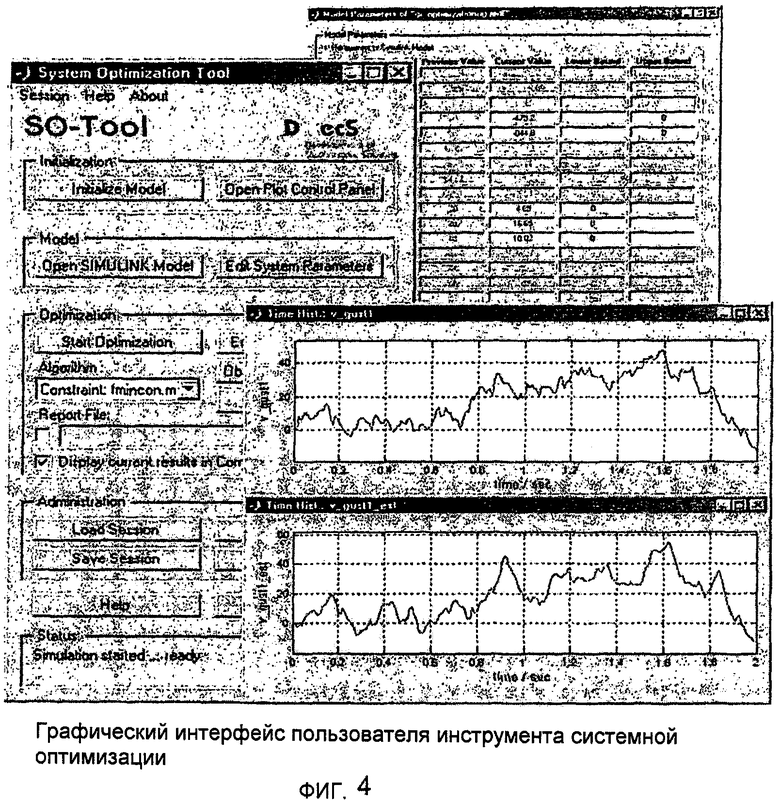
На фиг.4 показан графический интерфейс пользователя так называемого инструмента системной оптимизации (СО инструмента, SO tool), который используют в способе в соответствии с настоящим изобретением.
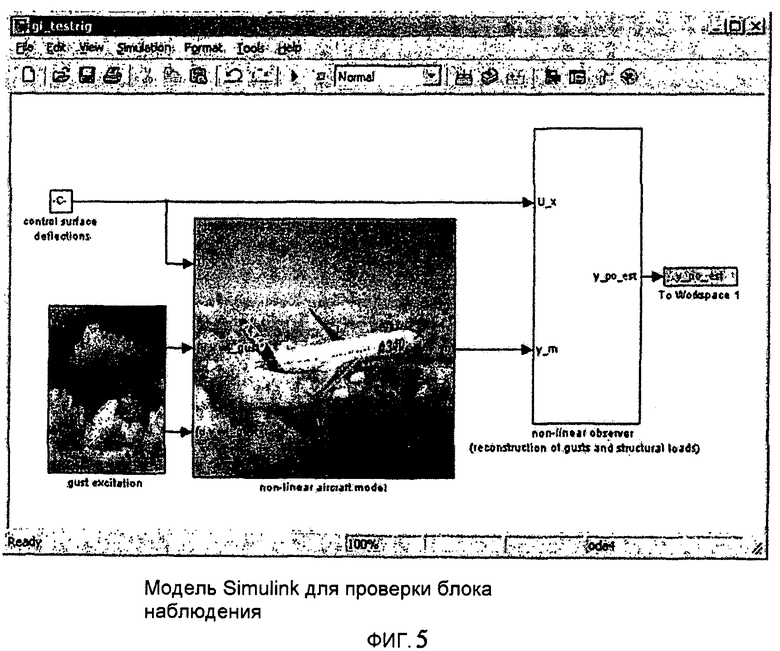
На фиг.5 показан моментальный снимок экрана модели Simulink для проверки блока наблюдения.
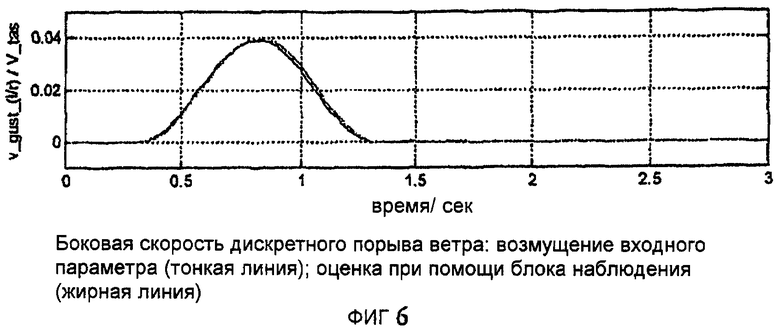
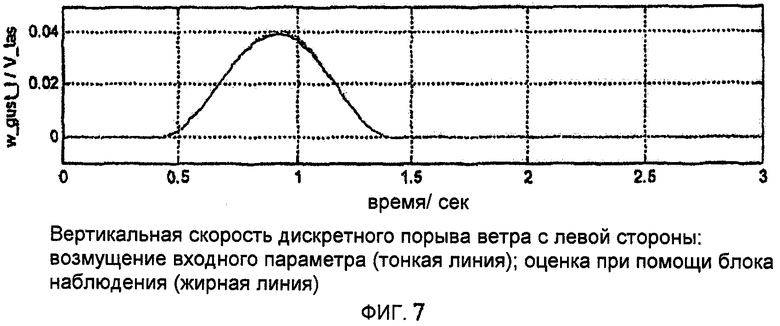
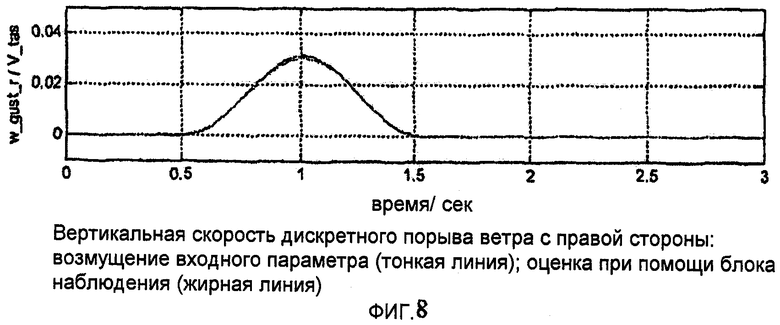
На фиг.6, 7 и 8 показаны соответственно боковая скорость, вертикальная скорость на левой стороне или вертикальная скорость на правой стороне для дискретного (прерывистого) порыва ветра, использованного как ввод возмущения (тонкая линия) и вычисленного при помощи блока наблюдения (жирная линия).
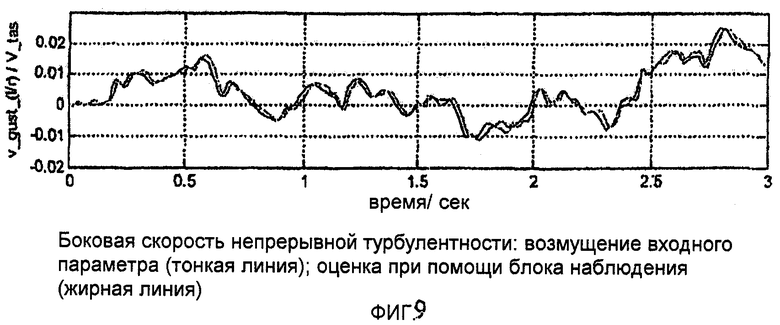
На фиг.9, 10 и 11 показаны соответственно в функции времени боковая скорость, вертикальная скорость на левой стороне или вертикальная скорость на правой стороне для непрерывной турбулентности, использованной как ввод возмущения (тонкая линия) и вычисленной при помощи блока наблюдения (жирная линия).
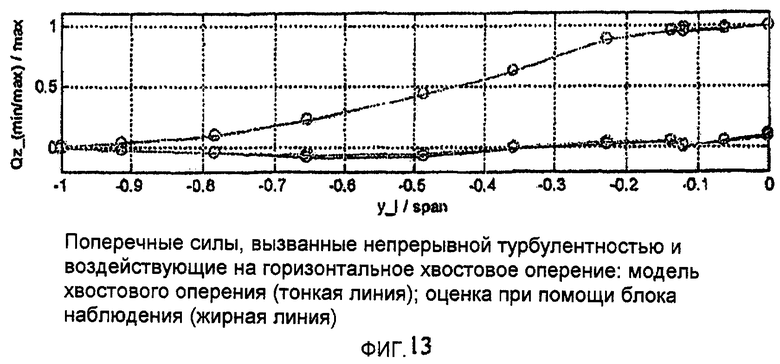
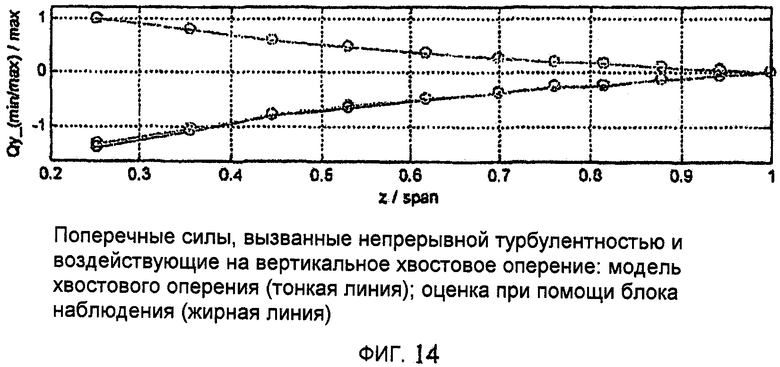
На фиг.12, 13 и 14 показаны соответственно поперечные силы, воздействующие на крыло, поперечные силы, воздействующие на горизонтальные хвостовые оперения или на вертикальное хвостовое оперение, отложенные в функции размаха или длины, нормализованной до единицы, для модели самолета (тонкая линия), и вычисленные при помощи блока наблюдения (жирная линия).
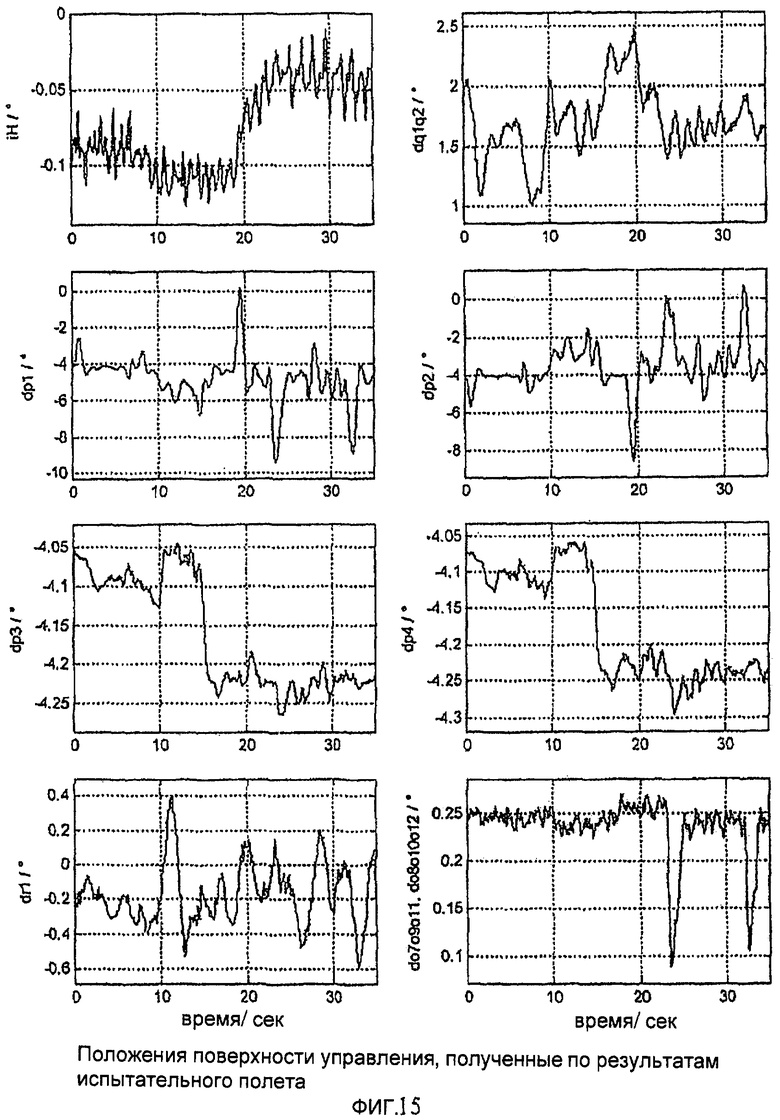
На фиг.15 показаны положения различных поверхностей управления в функции времени, полученные по итогам испытательного полета.
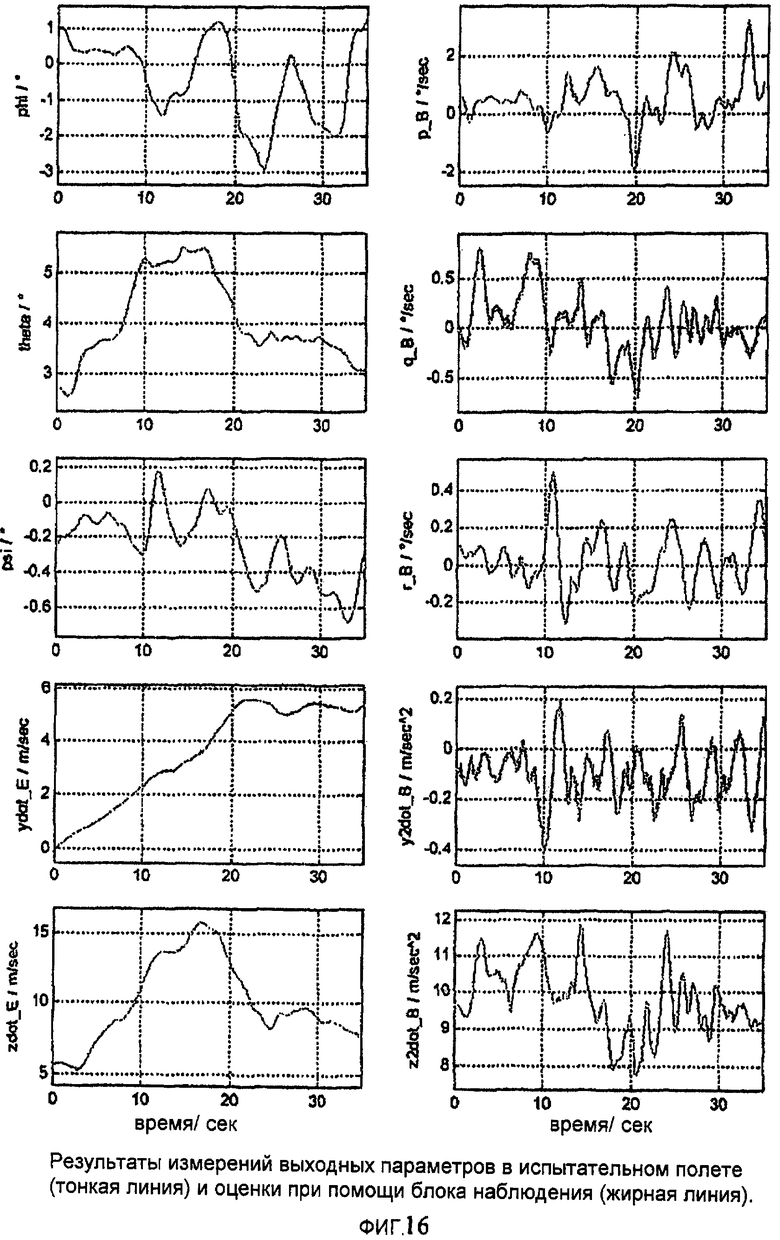
На фиг.16 показаны результаты измерений различных выходных параметров в функции времени при испытательном полете (тонкая линия) и вычисленных при помощи блока наблюдения (жирная линия).
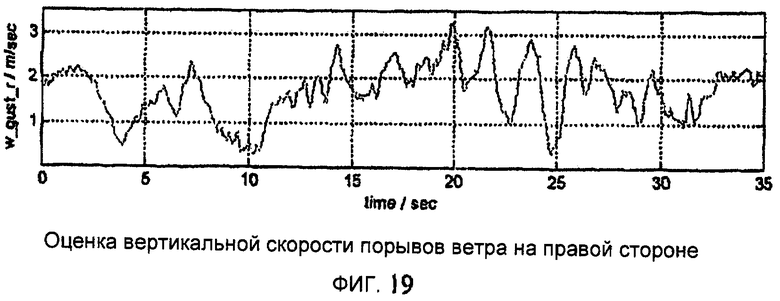
На фиг.17, 18 и 19 показаны соответственно расчетные данные боковой скорости порывов ветра, вертикальной скорости порывов ветра на левой стороне и вертикальной скорости порывов ветра на правой стороне для испытательного полета, описанного со ссылкой на фиг.15 и 16.
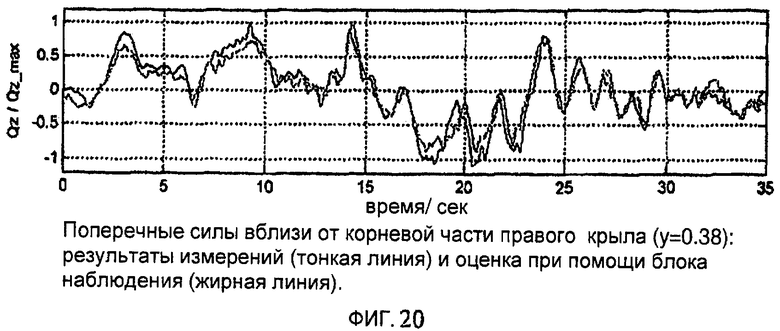
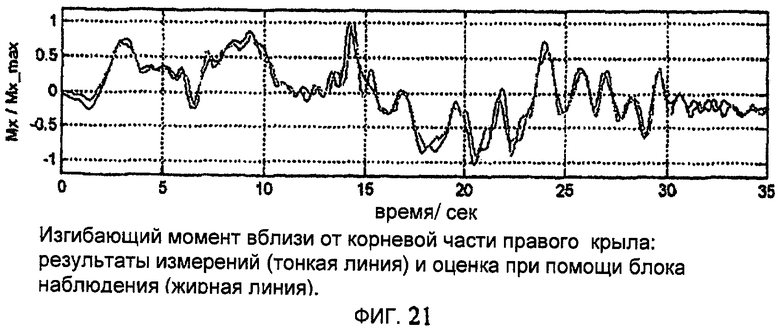
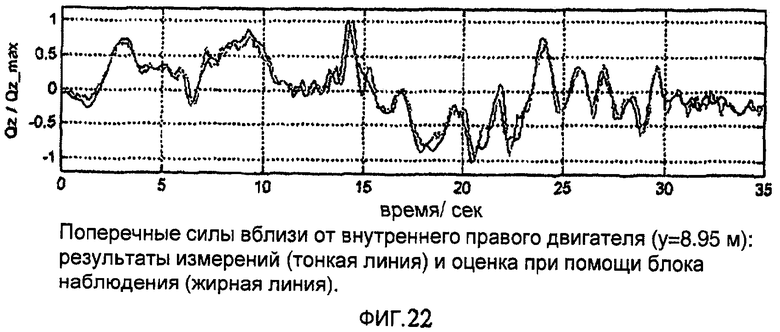
На фиг.20, 21, 22 и 23 показаны соответственно поперечная сила вблизи от корневой части правого крыла, изгибающий момент вблизи от корневой части правого крыла, поперечная сила вблизи от внутреннего правого двигателя или изгибающий момент вблизи от внутреннего правого двигателя в функции времени для испытательного полета, описанного со ссылкой на фиг.15 и 16, в виде измеренных параметров (тонкая линия) и параметров, вычисленных при помощи блока наблюдения (жирная линия).
На фиг.24 показан моментальный снимок экрана анамации движения самолета, скорости порывов ветра (светлые стрелки) и нагрузки на конструкцию (темные стрелки).
Подробное описание изобретения
При эксплуатации современного гражданского самолета важно знать внутренние нагрузки (изгибающие моменты и поперечные силы), воздействующие на конструкцию самолета во время полета. Эти нагрузки возникают за счет маневров, совершаемых по команде пилота или по команде от электронной системы управления полетом (EFCS), или за счет турбулентности и дискретных (прерывистых) порывов ветра в атмосфере, через которую пролетает самолет. Однако эти нагрузки нельзя контролировать по результатам измерений в любом произвольном желательном месте самолета. В соответствии с настоящим изобретением эти нагрузки скорее реконструируют при помощи расчетов из имеющихся полетных данных гражданского самолета (таких как угол Эйлера, "скорости корпуса", ускорения, данные GPS), положения поверхностей управления, с использованием математической модели самолета. Кроме того, следует провести оценку скоростей порывов ветра при помощи подходящего средства, чтобы можно было произвести расчет нагрузок, вызванных порывами ветра.
Реконструкция нагрузок может оказать большую помощь пилоту самолета. Одно из преимуществ возникает за счет реакции на промежуточные случаи, например, когда самолет пролетает через зону с сильными порывами ветра. Если знать нагрузки в любом месте конструкции самолета, можно легко определить, когда нагрузка превышает допустимые предельные значения, что требует произвести приземление и тщательную проверку конструкции. Если информация, связанная с нагрузками, может быть получена уже во время полета и она показывает, что не было критических нагрузок, тогда можно исключить длительные проверки на земле.
Реконструкция нагрузок, воздействующих во время полета, также является важной для увеличения срока службы систем проверки, так как это позволяет оператору проводить проверки по мере необходимости и оптимизировать интервалы технического обслуживания конструкции самолета. При этом специальный осмотр деталей конструкции проводят только в том случае, если на них воздействовали особые нагрузки во время полета самолета. За счет этого могут быть увеличены интервалы между проверками, причем проводят проверки только определенных деталей конструкции, в результате чего снижаются расходы по эксплуатации самолета и повышается его коэффициент готовности.
Кроме того, может быть проведена оценка скоростей порывов ветра, воздействующих как неизвестные входные параметры на самолет, чтобы реконструировать внутренние нагрузки. В соответствии с настоящим изобретением это может быть сделано при помощи блока наблюдения на основании нелинейной математической модели самолета.
Принцип работы блока наблюдения при решении указанных задач показан схематично на фиг.1. Блок наблюдения представляет собой параллельную модель самолета, которой управляют при помощи команд пилота и системы EFCS и работу которой корректируют по результатам измерений, которые отражают результирующее движение самолета. За счет соответствующего обобщения моделирования самолета, которое используют при проектировании блока наблюдения, скорости нагрузок от порывов ветра и/или турбулентности, действующие на самолет как неизвестные входные параметры, могут быть введены в процесс наблюдения. Выходные параметры блока наблюдения представляют собой оценку или расчет скоростей порывов ветра (далее для упрощения термин "скорости порывов ветра" используют для обозначения собственно скоростей порывов ветра, а также турбулентности и других возмущений в устойчивых потоках воздуха, причем нагрузки на конструкцию возникают как за счет нагрузок от порывов ветра (а также от турбулентности и т.п.), так и за счет нагрузок от команд поверхностями управления. Расчетные скорости порывов ветра преимущественно используют в качестве компонентов реконструкции нагрузок на конструкцию в любом желательном месте самолета.
Основой построения блока наблюдения является нелинейная модель самолета. В этом контексте, гибкость или упругие свойства конструкции самолета учитывают в модели, чтобы можно было провести реконструкцию внутренних нагрузок в любом желательном месте конструкции. Неизвестные боковую и асимметричную вертикальную скорости порывов ветра учитывают совместно как входные параметры блока наблюдения за счет обобщения модели самолета при помощи так называемых моделей возмущения.
В описанной здесь примерной модели, нелинейный блок наблюдения выполнен как стационарный фильтр Кальмана с шумовыми процессами на входе и выходными параметрами самолета. Проектирование блока наблюдения выполнено с нелинейной оптимизацией параметров за счет минимизации квадратичного функционала качества для оценки ошибок блока наблюдения.
Структура нелинейной модели самолета в соответствии с примерным вариантом показана на фиг.2. Набор субмоделей отражает индивидуальные дисциплины, использованные при создании модели самолета. В соответствии с примерным вариантом, модель самолета была кодирована в модуль ориентированной, в реальном масштабе времени, среде моделирования VarLoads (в среде анализа переменных нагрузок), которая основана на MATLAB/Simulink. Подробное описание модели и среды моделирования дано в публикации [1], J.Hofstee, Th. Kier, Ch. Cerulli, G. Looye: A Variable, full flexible dynamic response analysis tool for special investigations (VarLOADS), IFASD 2003, Amsterdam, The Netherlands, June 2003.
Субмодель "механическая конструкция", показанная на фиг.2, отображает модель гибкой конструкции самолета. Она комбинирует нелинейные уравнения движения (EQM) жесткого тела со всеми шестью степенями свободы (DoF), чтобы моделировать широкий диапазон полетных маневров, и набор линейных уравнений движения (EQM) для упругого движения конструкции самолета. Эта модель выведена из полной модели конечного элемента, в которой число степеней свободы понижено за счет статической конденсации, за счет чего были локализованы точки координатной сетки, соответствующие точкам масс. Дополнительное сжатие модели позволяет дополнительно понизить число степени свободы до числа упругих мод, которые являются существенными для наблюдаемого применения. Для самолета Airbus А340-300, который будет далее рассмотрен в качестве примера, первые 40 упругих мод с самыми низкими частотами включены в модель, чтобы производить расчет нагрузок в местах наблюдения между точками сетки гибкой конструкции с достаточной точностью. Внешние силы  , которые управляют уравнениями движения, возникают за счет воздушного потока и приводной тяги.
, которые управляют уравнениями движения, возникают за счет воздушного потока и приводной тяги.
Аэродинамические силы  от воздушного потока смоделированы в субмодели "аэродинамика". Расчет этих сил производят с использованием так называемых аэродинамических полос, которые прикрепляют к конструкции самолета (к фюзеляжу, крыльям, хвостовому оперению и т.д.). Силы, воздействующие на полосы, являются функциями истинной воздушной скорости Vt as и плотности воздуха ρ, положений поверхности управления
от воздушного потока смоделированы в субмодели "аэродинамика". Расчет этих сил производят с использованием так называемых аэродинамических полос, которые прикрепляют к конструкции самолета (к фюзеляжу, крыльям, хвостовому оперению и т.д.). Силы, воздействующие на полосы, являются функциями истинной воздушной скорости Vt as и плотности воздуха ρ, положений поверхности управления  , движения жесткого тела и упругого движения (угол атаки) самолета, также как и скорости порывов ветра
, движения жесткого тела и упругого движения (угол атаки) самолета, также как и скорости порывов ветра  и
и  на левой и правой сторонах самолета. Для медленных регулировок поверхности управления и движений самолета моделирование производят с использованием аэродинамической теории устойчивого состояния. Соответствующие важные аэродинамические коэффициенты выводят из результатов измерений в аэродинамической трубе. Прерывистое (задержанное) развитие аэродинамические сил, получаемое при быстрых изменениях положений поверхности управления и при быстрых изменениях угла атаки для индивидуальных полос, вызвано упругим движением конструкции самолета и возбуждением (реакцией) за счет порывов ветра, турбулентности и т.п. Эти прерывистые силы или силы не установившегося состояния вычисляют отдельно за счет использования функций Вагнера и Кюсснера и производят их наложение. Кроме того, влияния скоса потока вниз на хвост в горизонтальном направлении и бокового скоса потока (вызванного изменениями угла бокового скольжения) на хвост в вертикальном направлении вводят в аэродинамическую модель. Более того, временные задержки на каждой индивидуальной полосе учитывают для порывов ветра, "скоса потока вниз" и "бокового скоса потока".
на левой и правой сторонах самолета. Для медленных регулировок поверхности управления и движений самолета моделирование производят с использованием аэродинамической теории устойчивого состояния. Соответствующие важные аэродинамические коэффициенты выводят из результатов измерений в аэродинамической трубе. Прерывистое (задержанное) развитие аэродинамические сил, получаемое при быстрых изменениях положений поверхности управления и при быстрых изменениях угла атаки для индивидуальных полос, вызвано упругим движением конструкции самолета и возбуждением (реакцией) за счет порывов ветра, турбулентности и т.п. Эти прерывистые силы или силы не установившегося состояния вычисляют отдельно за счет использования функций Вагнера и Кюсснера и производят их наложение. Кроме того, влияния скоса потока вниз на хвост в горизонтальном направлении и бокового скоса потока (вызванного изменениями угла бокового скольжения) на хвост в вертикальном направлении вводят в аэродинамическую модель. Более того, временные задержки на каждой индивидуальной полосе учитывают для порывов ветра, "скоса потока вниз" и "бокового скоса потока".
Аэродинамические силы в точках приложения сил на индивидуальных полосах присваивают следующим точкам сетки механической конструкции.
Силы  тяги вычисляют в субмодели "привода". В описанной здесь примерной модели силы двигателя скомпенсированы силами сопротивления, воздействующими на самолет при угле атаки, соответствующем установившемуся состоянию 1g уровня полета при постоянной прямой тяге.
тяги вычисляют в субмодели "привода". В описанной здесь примерной модели силы двигателя скомпенсированы силами сопротивления, воздействующими на самолет при угле атаки, соответствующем установившемуся состоянию 1g уровня полета при постоянной прямой тяге.
Другая субмодель, показанная на фиг.2, представляет собой подсистему "выбора сигнала", которая выдает измеренные параметры  , которые требуются для проектирования блока наблюдения.
, которые требуются для проектирования блока наблюдения.
Внутренние нагрузки  (изгибающие моменты и поперечные силы) в местах наблюдения в конструкции самолета вычисляют в подсистеме "нагрузки на конструкцию". Эти сигналы представляют собой заданные параметры для процесса расчета нагрузок. Расчет нагрузок производят при помощи способа сложения (суммирования) сил, описанного, например, в публикации [2] Н.Henrichfreise, J.Hofstee, L.Bensch, D.Pohl, L.Merz: Gust load alleviation of a commercial transport aircraft, IFASD 2003, Amsterdam, The Netherlands, June 2003.
(изгибающие моменты и поперечные силы) в местах наблюдения в конструкции самолета вычисляют в подсистеме "нагрузки на конструкцию". Эти сигналы представляют собой заданные параметры для процесса расчета нагрузок. Расчет нагрузок производят при помощи способа сложения (суммирования) сил, описанного, например, в публикации [2] Н.Henrichfreise, J.Hofstee, L.Bensch, D.Pohl, L.Merz: Gust load alleviation of a commercial transport aircraft, IFASD 2003, Amsterdam, The Netherlands, June 2003.
Описанную выше модель самолета используют как модель расстояния (distance, как дистанционную модель) для проектирования блока наблюдения. Затем ее анализируют в первом представлении (формулировке) в пространстве состояний с использованием нелинейного дифференциального уравнения первого порядка
(1) и начального вектора состояния  . Вектор состояния модели расстояния, то есть самолета (индекс р)
. Вектор состояния модели расстояния, то есть самолета (индекс р)
(2) может быть введен в субвектор состояния  для движения жесткого тела и в вектор
для движения жесткого тела и в вектор  для состояний, описывающих упругое движение самолета. Команды поверхностями управления комбинируют в векторе
для состояний, описывающих упругое движение самолета. Команды поверхностями управления комбинируют в векторе  (индекс с) ввода управления модели расстояния
(индекс с) ввода управления модели расстояния
(3) где ux,1, ux,2 … ux,n (здесь n=20) представляют собой уставки или значения регулировки рулей, рулей высоты, элеронов, интерцепторов, стабилизаторов и т.п.
Скорости порывов ветра, то есть скорости порывов ветра, турбулентности и другие аналогичные потоки на левой и правой сторонах самолета, представляют собой неизвестные параметры возмущения, воздействующие на систему. Эти параметры комбинируют в векторе (индекс d) ввода возмущения для модели расстояния
(4) в которой ugust, vgust, wgust описывают соответственно продольный, боковой и вертикальный компоненты скорости в системе координат, присвоенной самолету.
Скорости порывов ветра на левой и правой сторонах самолета, введенные в вектор  (индекс d) ввода возмущения, могут содержать дополнительные компоненты скорости в виде неизвестных параметров возмущения
(индекс d) ввода возмущения, могут содержать дополнительные компоненты скорости в виде неизвестных параметров возмущения
(4а) где vgust,front, vgust,fin, wgust,wing,l, wgust,wing,r описывают соответственно передний или боковой компоненты скорости в системе координат самолета.
Стандартными сигналами измерения для пассажирского самолета являются углы Эйлера (Ф, Θ, Ψ) и "скорости корпуса" (pB, qB, rB) в системе координат самолета. Кроме того, боковую и вертикальную скорости (yE, rE) центра тяжести в системе отсчета среды и боковое и вертикальное ускорения (yB, zB) корпуса самолета вблизи от центра тяжести в системе координат самолета вводят в блок наблюдения. Все эти сигналы моделируют с использованием выходного уравнения (индекс m) измерения
(5) Задачей проектирования блока наблюдения является реконструкция внутренних нагрузок. Для этого производят оценку или расчет неизвестных скоростей порывов ветра, как это описано далее более подробно. Эти переменные вводят в заданное выходное уравнение (индекс о)
(6) В приведенных здесь выше уравнениях модели самолета скорости порывов ветра представляют собой как входные параметры, так и выходные параметры. Как это будет описано далее более подробно, эти скорости порывов ветра могут быть учтены при проектировании блока наблюдения за счет соответствующего обобщения модели расстояния.
Задачей является реконструкция внутренних нагрузок, воздействующих на конструкцию самолета, вызванных маневрами в полете и возмущениями от порывов ветра, турбулентностей и т.п., в любом желательном месте конструкции самолета. При нормальном полете без порывов ветра нагрузки на конструкцию самолета создаются только за счет команд пилота или системы EPCS. Эти так называемые нагрузки маневра могут быть реконструированы с использованием модели самолета, показанной на фиг.2, и с использованием измеренных уставок поверхностей управления, в качестве входных параметров. Однако если самолет пролетает через среду с порывами ветра или турбулентностью, дополнительные нагрузки от порывов ветра накладываются на нагрузки маневра. Чтобы можно было также реконструировать эти нагрузки, требуются неизвестные скорости порывов ветра на вводах возмущения самолета. Прямые результаты измерений скорости порывов ветра при помощи датчиков, установленных на самолете, невозможны по двум причинам. Во-первых, датчики подвержены движению самолета, так что они измеряют не только скорость порывов ветра, но и движение самолета. Во-вторых, имеющиеся в настоящее время датчики могут измерять скорость порывов ветра только в одном месте, обычно на носу самолета. Поэтому не могут быть обнаружены двумерные нагрузки от порывов ветра, такие как изолированные вихри, которые влияют на бортовую качку самолета.
Далее описан нелинейный блок наблюдения, предназначенный для расчета многомерных порывов ветра, турбулентностей и т.п. и нагрузок на конструкцию, возникающих за счет них и за счет маневров самолета. Этот подход сфокусирован только на боковом и вертикальном компонентах скорости порывов ветра vgust и wgust из уравнения (4). В настоящее время продольные порывы ветра во внимание не принимают. Скорости порывов ветра моделируют при помощи модели возмущения


(7) чтобы включить их в процесс наблюдения. Их генерируют при помощи выходного вектора  и при помощи соответствующих параметров ввода возмущения модели в векторе
и при помощи соответствующих параметров ввода возмущения модели в векторе  Замена параметров ввода возмущения в модели расстояния выходным параметром модели возмущения, то есть
Замена параметров ввода возмущения в модели расстояния выходным параметром модели возмущения, то есть  в уравнении (1), дает нелинейное дифференциальное уравнение
в уравнении (1), дает нелинейное дифференциальное уравнение


(8) обобщенной модели расстояния. Вектор  состояния содержит состояния
состояния содержит состояния  модели самолета и состояния
модели самолета и состояния  модели возмущения. Векторные процессы
модели возмущения. Векторные процессы  и
и  вместе с шумовым процессом на входах управления и возмущениями добавляют в обобщенную модель расстояния, чтобы можно было спроектировать блок наблюдения аналогично фильтру Кальмана, как это описано в публикации [3] В. Friedland: Control System Design - An introduction to state-space methods, McGraw-Hill, 1986. Шум процесса вводят в вектор
вместе с шумовым процессом на входах управления и возмущениями добавляют в обобщенную модель расстояния, чтобы можно было спроектировать блок наблюдения аналогично фильтру Кальмана, как это описано в публикации [3] В. Friedland: Control System Design - An introduction to state-space methods, McGraw-Hill, 1986. Шум процесса вводят в вектор  .
.
С учетом уравнения (5) выходное уравнение измерения обобщенной модели расстояния становится уравнением
(9) в котором векторный процесс  добавляет шум измерения на выходах модели расстояния, чтобы можно было проектировать блок наблюдения аналогично фильтру Кальмана. Что является обычным в теории фильтра Кальмана, индивидуальные шумовые процессы в векторах
добавляет шум измерения на выходах модели расстояния, чтобы можно было проектировать блок наблюдения аналогично фильтру Кальмана. Что является обычным в теории фильтра Кальмана, индивидуальные шумовые процессы в векторах  и
и  считают не коррелированным белым шумом с нормальным распределением, с известными постоянными интенсивностями.
считают не коррелированным белым шумом с нормальным распределением, с известными постоянными интенсивностями.
Основные значения интенсивностей шума измерения могут быть получены из технических требований использованных датчиков, см. публикацию [4] Н.Henrichfreise: Prototyping of a LQG Compensator for a Compliant Positioning System with Friction. TRANSMECHATRONICS - Development and Transfer of development systems of mechatronics, HNI-Verlagsschriflreihe, Vol.23, 1st Edition, Paderbom 1997. Эта публикация выложена в интернете на сайте CLM по адресу www.clm-online.de. С другой стороны, интенсивности шумовых процессов используют в качестве расчетных параметров, как это описано далее более подробно.
Наконец, замена ввода возмущения в заданном выходном уравнении (6) приводит к заданному выходному уравнению обобщенной модели расстояния
(10) которое позволяет производить расчет нагрузок на конструкцию и скоростей порывов ветра из состояний обобщенной модели и позволяет контролировать входные параметры.
Нелинейная обобщенная модель расстояния в соответствии с уравнениями (8)-(10) служит основой для проектирования блока наблюдения.
При использовании векторных функций из обобщенной модели расстояния структура блока наблюдения может быть описана следующими уравнениями, см. публикацию [5] В.Friedland: Advanced control system design. Prentice Hall, 1996.


(11) (12) (13) Решение дифференциального уравнения (11) состояния дает оценку  вектора состояния обобщенной модели расстояния. Уравнением (11) управляет входной вектор
вектора состояния обобщенной модели расстояния. Уравнением (11) управляет входной вектор  управления и выходной вектор
управления и выходной вектор  измерения модели расстояния, которые также являются входными параметрами в блоке наблюдения (см. фиг.3).
измерения модели расстояния, которые также являются входными параметрами в блоке наблюдения (см. фиг.3).
Ввод измерения используют для образования ошибки измерения блока наблюдения, которая представляет собой разность между истинными измеренными значениями вектора  и расчетными значениями вектора
и расчетными значениями вектора  из уравнения (12). Их подают назад на производную вектора состояния блока наблюдения при помощи матрицы
из уравнения (12). Их подают назад на производную вектора состояния блока наблюдения при помощи матрицы  усиления. При правильном проектировании эта обратная связь приводит к тому, что расчетные значения становятся практически равными истинным измеренным значениям, то есть ошибки измерения блока наблюдения уменьшаются почти до нуля. Для этого расчетный вектор состояния
усиления. При правильном проектировании эта обратная связь приводит к тому, что расчетные значения становятся практически равными истинным измеренным значениям, то есть ошибки измерения блока наблюдения уменьшаются почти до нуля. Для этого расчетный вектор состояния  модели расстояния в векторе
модели расстояния в векторе  состояния блока наблюдения должен точно следить за вектором
состояния блока наблюдения должен точно следить за вектором  состояния расстояния. При неизвестных параметрах возмущения на входах возмущения самолета или модели расстояния в векторе
состояния расстояния. При неизвестных параметрах возмущения на входах возмущения самолета или модели расстояния в векторе  , субсостояние модели возмущения должно генерировать выходные параметры модели возмущения в
, субсостояние модели возмущения должно генерировать выходные параметры модели возмущения в  из уравнения (7), которые являются близкими к истинным параметрам на входе возмущения. Следовательно, выходные параметры модели возмущения в блоке наблюдения могут служить в качестве оценки неизвестных скоростей порывов ветра. Вместе с внутренними нагрузками на конструкцию в точках измерения, эти параметры используют как выходные параметры блока наблюдения в векторе
из уравнения (7), которые являются близкими к истинным параметрам на входе возмущения. Следовательно, выходные параметры модели возмущения в блоке наблюдения могут служить в качестве оценки неизвестных скоростей порывов ветра. Вместе с внутренними нагрузками на конструкцию в точках измерения, эти параметры используют как выходные параметры блока наблюдения в векторе  , полученном из уравнения (13).
, полученном из уравнения (13).
При использовании структуры блока наблюдения в соответствии с уравнениями (11)-(13) единственной остающейся задачей является определение матрицы усиления блока наблюдения. Это определение производят с использованием блока наблюдения, спроектированного аналогично фильтру Кальмана, который уже подготовлен за счет добавления шумового процесса в обобщенную модель расстояния. Так как базовая модель расстояния является нелинейной, матрицу усиления блока наблюдения определяют за счет нелинейной оптимизации параметров, основанной на моделировании системы, которая содержит обобщенную модель расстояния самолета и блок наблюдения (аналогично показанному на фиг.3). Обобщенную модель расстояния возбуждают в этом случае при помощи процессов дискретного белого шума в векторах  и
и  . Смоделированные временные характеристики используют для квадратичной функции стоимости
. Смоделированные временные характеристики используют для квадратичной функции стоимости

(14) которая содержит сумму ковариационных функций погрешности оценки блока наблюдения для N проведенных операций моделирования. При таком проектировании среды, которое является аналогичным проектированию фильтра Кальмана, усиление  блока наблюдения находят при помощи цифровой минимизации функции стоимости J относительно элементов матрицы
блока наблюдения находят при помощи цифровой минимизации функции стоимости J относительно элементов матрицы  усиления блока наблюдения. Как это объясняется в публикации [4], интенсивности шумового процесса в субвекторе
усиления блока наблюдения. Как это объясняется в публикации [4], интенсивности шумового процесса в субвекторе  на входах управления самолета или модели расстояния используют для расчета матрицы усиления блока наблюдения, чтобы подстроить блок наблюдения к скорости и повысить его устойчивость с учетом статических неопределимостей входного тракта управления модели расстояния. Так как ввод
на входах управления самолета или модели расстояния используют для расчета матрицы усиления блока наблюдения, чтобы подстроить блок наблюдения к скорости и повысить его устойчивость с учетом статических неопределимостей входного тракта управления модели расстояния. Так как ввод  модели возмущения в обобщенную модель расстояния неизвестен, интенсивности соответствующих шумовых процессов в
модели возмущения в обобщенную модель расстояния неизвестен, интенсивности соответствующих шумовых процессов в  задают возможно более высокими, чтобы повысить устойчивость блока наблюдения с учетом того факта, что отсутствует сигнал в виде входного параметра блока наблюдения.
задают возможно более высокими, чтобы повысить устойчивость блока наблюдения с учетом того факта, что отсутствует сигнал в виде входного параметра блока наблюдения.
Для дальнейшего обсуждения матрицу усиления блока наблюдения делят аналогично вектору состояния обобщенной модели расстояния
(15) в которой субматрицы  и
и  используют для возврата ошибок измерения в блоке наблюдения в производную состояний модели расстояния или состояний модели возмущения в блоке наблюдения. Как это следует из уравнения (2) для вектора состояния модели расстояния, субматрица
используют для возврата ошибок измерения в блоке наблюдения в производную состояний модели расстояния или состояний модели возмущения в блоке наблюдения. Как это следует из уравнения (2) для вектора состояния модели расстояния, субматрица  может быть дополнительно разделена на матрицы
может быть дополнительно разделена на матрицы  и
и  усиления возврата. Если теперь произвести подсчет числа состояний расстояния, например,
усиления возврата. Если теперь произвести подсчет числа состояний расстояния, например,  ,
,  и выбрать четыре состояния модели возмущения nd=4, то тогда для npm=10 измеренных параметров, из уравнения (5) получают всего 960 элементов для матрицы усиления блока наблюдения.
и выбрать четыре состояния модели возмущения nd=4, то тогда для npm=10 измеренных параметров, из уравнения (5) получают всего 960 элементов для матрицы усиления блока наблюдения.
Очевидно, что нелогично проектировать блок наблюдения с таким большим числом элементов усиления, не только по причине больших затрат на обработку данных, но и по причине описанной выше сходимости проблемы оптимизации. Поэтому в процессе проектирования используют только несколько элементов усиления в матрице усиления блока наблюдения, которые выбирают из таких соображений, как устойчивость (стабильность) и время реакции. Все другие элементы устанавливают равными нулю. Исследования примерного варианта матрицы усиления блока наблюдения показали, что 12 элементов усиления достаточны для получения хороших характеристик блока наблюдения, как это описано далее более подробно. Кроме того, такое упрощение резко снижает затраты на обработку данных в блоке наблюдения и упрощает реализацию реального масштаба времени.
Как уже было указано здесь выше, проектирование блока наблюдения было осуществлено за счет нелинейной оптимизации параметров, на основании временных характеристик, полученных при помощи моделирования. Это проектирование было осуществлено с использованием так называемого инструмента системной оптимизации (SO Tool), см. публикацию [6] S.Klotzbach, S.Oedekoven, O.Grassmann: Optimisation in the mechatronic development process. VDI Mechatronics Conference 2003, Fuida, Germany, 2003, которая выложена в Интернете на сайте DmecS по адресу www.dmecs.de, причем этот инструмент был разработан на основании алгоритмов системы MATLAB Optimization Toolbox. Подлежащую моделированию систему предоставляют в виде модели Simulink. Инструмент SO tool содержит графический интерфейс пользователя, в который пользователь может легко загрузить модель системы и определить заданные параметры и интерактивно выбранные параметры оптимизации, необходимые для цикла (прогона) оптимизации. На фиг.4 показан графический интерфейс пользователя инструмента SO tool.
Далее приведены результаты испытаний и моделирования для самолета Airbus 340-300.
Испытания были проведены с использованием модели Simulink, показанной на фиг.5, в которой использована блок-схема, показанная на фиг.3, в которой нелинейный блок наблюдения связан с моделью самолета. Дополнительная подсистема была использована для генерирования скоростей порывов ветра с косинусоидальным дискретным (прерывистым) распределением и непрерывными турбулентностями в качестве возмущений. Эта подсистема создает скорости, воздействующие на левую и правую стороны смоделированного самолета.
За счет установки вводов  управления модели самолета и блока наблюдения, равными нулю, маневры и нагрузки от маневров далее не будут учитываться. Это сделано потому, что блок наблюдения был спроектирован на основе номинального моделирования самолета (модель расстояния для проекта блока наблюдения согласована с моделью самолета), так что нагрузки от маневров правильно реконструируются при помощи блока наблюдения. Только возмущение системы за счет порывов ветра является важным для оценки характеристик блока наблюдения.
управления модели самолета и блока наблюдения, равными нулю, маневры и нагрузки от маневров далее не будут учитываться. Это сделано потому, что блок наблюдения был спроектирован на основе номинального моделирования самолета (модель расстояния для проекта блока наблюдения согласована с моделью самолета), так что нагрузки от маневров правильно реконструируются при помощи блока наблюдения. Только возмущение системы за счет порывов ветра является важным для оценки характеристик блока наблюдения.
На фиг.6-8 показаны боковая и вертикальная скорости порывов ветра, воздействующие на самолет, и соответствующие оценки при помощи блока наблюдения. Скорости порывов ветра масштабированы за счет деления на истинную воздушную скорость самолета.
В то время как боковые скорости порывов ветра являются одинаковыми на обеих сторонах самолета, вертикальные скорости порывов ветра могут быть различными на левой и правой сторонах самолета. Они воздействуют на самолет в разное время и с различными амплитудами.
На фиг.6-8 входные параметры возмущения показаны тонкими линиями, а оценки, сделанные при помощи блока наблюдения, показаны жирными линиями, причем можно видеть, что боковые и асимметричные вертикальные скорости порывов ветра воспроизведены с высокой точностью.
На фиг.9-11 показано возмущение, вызванное многомерной непрерывной турбулентностью, которое приближено к действительности, где боковые и вертикальные скорости порывов ветра, воздействующие на самолет, и оценки, сделанные при помощи блока наблюдения, показаны соответственно тонкими и жирными линиями. Временной график показывает, что турбулентность реконструирована с такой же высокой точностью, что и дискретные скорости порывов ветра. Используя реконструкции скоростей порывов ветра, блок наблюдения может производить расчет надежных оценок теоретически вызванных нагрузок. Это показано так называемыми огибающими, которые содержат максимальные и минимальные значения индивидуальных нагрузок для имеющихся точек контроля на соответствующих частях конструкции самолета. Эти огибающие позволяют произвести быстрый обзор максимальных нагрузок по всей конструкции самолета, которые возникают в конкретной аварийной ситуации или во время всего полета. Это очень полезно для оценки возможности превышения нагрузками на определенной части конструкции самолета заданных значений.
На фиг.12-14 показаны огибающие для поперечных сил на крыле и на горизонтальном и вертикальном килях (хвостовых опереньях), возникающих за счет непрерывного воздействия турбулентностей, показанных на фиг.9-11. Так как нагрузки на обеих сторонах самолета при реконструкции являются одинаковыми, на чертежах показана только левая сторона самолета. Силы масштабированы за счет деления на максимальное положительное значение на чертежах и отложены по размаху крыльев и килей, нормализованных до единицы. По желанию, могут быть показаны изгибающие моменты или нагрузки на других компонентах самолета, например на фюзеляже.
Практически нет различий между огибающими на фиг.12-14 для поперечных сил модели самолета и блоком наблюдения. Нагрузки на конструкцию очень хорошо реконструируются блоком наблюдения для всех точек измерения (эти положения отмечены крестиками). Различные точки измерения используют при моделировании самолета как гибкой системы, как уже было указано здесь выше. Это позволяет производить расчет нагрузок в любом желательном месте конструкции самолета.
На фиг.12 ступеньки в поперечных силах вдоль крыла самолета вызваны весом двигателей базовой модели самолета А340-300.
Описанные здесь результаты были получены при помощи блока наблюдения, который был спроектирован для номинальной модели самолета (модель расстояния для блока наблюдения согласуется с моделью самолета). Однако в реальном самолете могут быть отклонения от модели самолета как по структуре модели, так и по параметрам модели (таким как, например, распределение массы, число Маха, высота полета). Исследования показали, что воздействия на расчетные нагрузки являются допустимыми, если отклонения не очень большие. Ошибки частично компенсируются за счет более значительных отклонений при оценке нагрузок от порывов ветра или турбулентностей.
Далее приведены результаты, полученные в испытательном полете реального самолета. Во время полета регистрировали временной график для всех положений поверхностей управления (входные параметры управления) и измеренные параметры. Оценку полученных таким образом данных производили при моделировании после полета, с использованием только блока наблюдения в виде модели Simulink, показанной на фиг.5.
На фиг.15 и 16 показаны положения поверхностей управления и измеренные параметры, которые были зарегистрированы во время испытательного полета самолета Airbus A340 FT. На самолет воздействовали маневры пилота и турбулентности. Блок наблюдения работает очень хорошо и имеет малую ошибку измерения. Полученные при помощи блока наблюдения оценки, показанные на фиг.16, отслеживают измеренные во время испытательного полета параметры с очень малой ошибкой, так что различие между ними едва можно увидеть на чертежах.
На фиг.17-19 показаны оценки на левой и правой сторонах самолета, которые свидетельствуют о том, что блок наблюдения дает хорошие результаты с малой ошибкой измерения. В то время как оценки для боковой скорости порыва ветра являются одинаковыми на обеих сторонах самолета, оценки для вертикальных скоростей порывов ветра на левой и правой сторонах самолета являются различными.
Оценки для скоростей порывов ветра и положений поверхности управления были введены в аэродинамическую субмодель, которая содержится в блоке наблюдения. Внутренние нагрузки на конструкцию в точках измерения реконструируют путем приложения результирующих аэродинамических сил к точкам сетки механической конструкции самолета. Испытательный самолет был снабжен датчиками напряжений в некоторых из этих точек измерения, что позволяет определять реальные нагрузки, воздействующие на конструкцию самолета. На фиг.20-23 произведено сравнение этих нагрузок в различных положениях на правом крыле с соответствующими оценками блока наблюдения. На фиг.20 и на фиг.21 показаны результаты для поперечной силы и изгибающего момента в точке вблизи от корневой части правого крыла. Сравнение реальной и расчетной нагрузок в различных точках вблизи от внутреннего правого двигателя показано на фиг.22 и на фиг.23.
Показанные на фиг.20-23 результаты свидетельствуют о том, что блок наблюдения дает очень хорошие оценки нагрузок реального самолета. Небольшие отклонения являются следствием различий между моделью самолета, использованной при проектировании блока наблюдения, и реальным самолетом. Такие отклонения касаются конструкции самолета (например, число упругих мод) и параметров (например, распределение массы, число Маха, высота полета) и никогда не могут быть полностью исключены на практике. Однако было показано, что блок наблюдения является достаточно устойчивым относительно таких отклонений.
Так как ошибки измерения блока наблюдения являются небольшими и нагрузки на конструкцию могут быть хорошо реконструированы, то можно полагать с большой долей уверенности, что оценки скоростей порывов ветра, показанные на фиг.17-19, являются надежными.
Важным инструментом для понимания движения самолета, соответствующего показанным ранее временным графикам, является трехмерная анимация самолета. Она может показать регулировки поверхности управления, полное трехмерное движение самолета и упругое движение конструкции самолета. Дополнительные параметры могут быть показаны стрелками, длина которых изменяется в соответствии с величиной соответствующего параметра. На фиг.24 показано изображение самолета Airbus 340-300, рассмотренного в описанном здесь выше примерном варианте. Анимацию получают с использованием входных параметров блока наблюдения (то есть положений поверхности управления и измеренных параметров) и расчетных значений блока наблюдения (то есть упругой деформации конструкции самолета, скоростей порывов ветра и внутренних нагрузок на конструкцию). Скорости порывов ветра и нагрузки в различных местах конструкции самолета показаны светлыми или темными стрелками.
Способ в соответствии с настоящим изобретением может быть использован для реконструирования нагрузок, возникающих в любых местах конструкции самолета за счет маневров в полете и других влияний, таких как порывы ветра и турбулентности, во время или после полета. Таким образом, могут быть осуществлены быстрые оценки того, следует ли производить обследование конструкции после конкретных событий. За счет этого могут быть повышены стандарты безопасности, снижены до минимальных время нахождения на земле и эксплуатационные расходы и, одновременно, повышена степень готовности самолетов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СВЕДЕНИЕ К МИНИМУМУ ДИНАМИЧЕСКИХ НАГРУЗОК НА КОНСТРУКЦИЮ САМОЛЕТА | 2007 |
|
RU2401219C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ НА ПОСАДКЕ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2581215C1 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВОЗДУШНОЙ СПУТНОЙ СТРУИ ЗА ТРАНСПОРТНЫМ СРЕДСТВОМ | 1993 |
|
RU2088487C1 |
| СИСТЕМА УПРАВЛЯЕМЫХ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЙ ДЛЯ ФУНКЦИОНАЛЬНО-МОДЕЛИРУЮЩЕГО КОМПЛЕКСА | 2005 |
|
RU2298835C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСХОДОВАНИЯ РЕСУРСА И СПЕКТРА НАГРУЗОК ОСНОВНЫХ ЭЛЕМЕНТОВ ПЛАНЕРА МАНЕВРЕННЫХ САМОЛЕТОВ | 2011 |
|
RU2473959C1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ВИХРЕВОЙ БЕЗОПАСНОСТИ ПОЛЕТА ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2496121C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНДНОГО ИНДЕКСА ДЛЯ УПРАВЛЕНИЯ ТЯГОЙ ДВИГАТЕЛЯ САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2509037C1 |
| СПОСОБ УПРАВЛЕНИЯ АВИАЦИОННОЙ БУКСИРОВОЧНОЙ ТРОСОВОЙ СИСТЕМОЙ | 2009 |
|
RU2395430C1 |
| Способ моделирования в аэродинамических трубах влияния вертикального порыва ветра на ближнее поле летательного аппарата и на громкость звукового удара на земле | 2024 |
|
RU2830130C1 |
| Способ проведения испытаний в аэродинамических трубах с моделированием влияния вертикального, горизонтального или смешанного порыва ветра | 2024 |
|
RU2827746C1 |








Изобретение относится к области реконструирования порывов ветра и/или нагрузок на конструкцию летательного аппарата. Способ включает в себя формирование блока наблюдения на базе нелинейной модели самолета, который описывает движение самолета во всех шести степенях свободы (DoF) и упругое движение конструкции самолета, непрерывную подачу всех данных и результатов измерений, существенных для описания состояния самолета, в блок наблюдения и расчет скоростей порывов ветра и нагрузок на конструкцию при помощи блока наблюдения из введенных данных и результатов измерений. Обеспечивается возможность повышения стандартов безопасности, снижение времени нахождения на земле и эксплуатационных расходов. 48 з.п. ф-лы, 24 ил.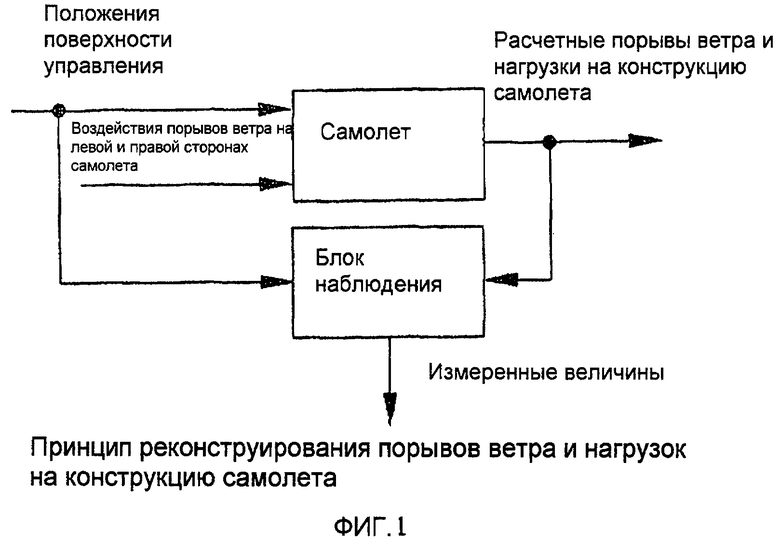
1. Способ реконструирования нагрузок от порывов ветра и/или нагрузок на конструкцию летательного аппарата, в частности пассажирского самолета, который включает в себя следующие операции: а) формирование блока наблюдения на базе нелинейной или линейной модели самолета, который описывает движение самолета во всех шести степенях свободы и упругое движение конструкции самолета, b) непрерывная подача в блок наблюдения всех данных и результатов измерений, существенных для описания состояния самолета, с) расчет скоростей порывов ветра и нагрузок на конструкцию за счет маневра и порывов ветра при помощи блока наблюдения, из введенных данных и результатов измерений.
2. Способ по п.1, в котором расчет нагрузок на конструкцию, генерируемых за счет маневра и/или за счет порывов ветра и/или турбулентности, производят для любой из точек конструкции самолета.
3. Способ по п.1 или 2, в котором производят расчет скоростей порывов ветра и/или турбулентности.
4. Способ по п.1, в котором данные и результаты измерений, существенные для описания состояния самолета, включают в себя данные, выбранные из группы, в которую входят скорости самолета, углы Эйлера, "скорости корпуса", ускорения и данные глобальной системы местоопределения GPS.
5. Способ по п.1, в котором данные и результаты измерений, существенные для описания состояния самолета, включают в себя данные относительно поверхности управления.
6. Способ по п.1, в котором данные и результаты измерений, существенные для описания состояния самолета, включают в себя данные относительно силы тяги двигателя.
7. Способ по п.1, в котором данные, существенные для описания состояния самолета, включают в себя плотность воздуха.
8. Способ по п.1, в котором расчет нагрузок от порывов ветра и/или нагрузок на конструкцию производят во время полета и результаты регистрируют.
9. Способ по п.1, в котором расчет нагрузок от порывов ветра и/или нагрузок на конструкцию производят после полета на основании зарегистрированных данных.
10. Способ по п.8 или 9, в котором график осмотра, технического обслуживания и ремонта составляют на основании данных, полученных в зависимости от появления оговоренных нагрузок.
11. Способ по п.10, в котором частоту проведения осмотров и/или технического обслуживания и/или ремонта составляют на основании полученных данных в зависимости от появления оговоренных нагрузок.
12. Способ по п.1, в котором блок наблюдения основан на наборах нелинейных уравнений движения (EQM), описывающих движение жесткого корпуса самолета, и на наборах линейных уравнений движения, описывающих упругое движение конструкции самолета.
13. Способ по п.1, в котором блок наблюдения основан на линейной модели.
14. Способ по п.1, в котором модель самолета в блоке наблюдения основана на модели конечного элемента.
15. Способ по п.14, в котором в модели конечного элемента число степеней свободы понижено за счет статической конденсации, причем соответствующие точки масс распределены в точках сетки.
16. Способ до п.14 или 15, в котором в модели конечного элемента число степеней свободы, касающихся движения упругого корпуса самолета, понижено до заданного числа мод, касающихся движения упругого корпуса самолета.
17. Способ по п.16, в котором несколько первых мод, имеющих самые низкие частоты, введены в модель для того, чтобы производить расчет нагрузок в точках измерения между точками сетки гибкой конструкции с заданной точностью.
18. Способ по п.1, в котором нелинейный блок наблюдения выполнен в виде имеющего устойчивое состояние фильтра Кальмана, причем процессы возмущения воздействуют на входные и выходные параметры модели самолета.
19. Способ по п.18, в котором минимизацию соответствующей квадратичной функции стоимости осуществляют при помощи нелинейной оптимизации параметров.
20. Способ по п.1, в котором нелинейная модель содержит аэродинамическую субмодель, которую используют для расчета аэродинамических сил  .
.
21. Способ по п.20, в котором расчет аэродинамических сил в аэродинамической субмодели проводят с использованием аэродинамических полос.
22. Способ по п.20 или 21, в котором входные параметры, которые вводят в аэродинамическую субмодель, выбирают из группы, в которую входят положения  поверхности управления, истинная воздушная скорость Vt as, плотность воздуха ρ, а также скорости порывов ветра
поверхности управления, истинная воздушная скорость Vt as, плотность воздуха ρ, а также скорости порывов ветра  и
и  на левой или правой сторонах самолета.
на левой или правой сторонах самолета.
23. Способ по п.22, в котором скорости порывов ветра и , которые подают на аэродинамическую субмодель, являются неизвестными внешними параметрами возмущения.
24. Способ по п.20, в котором на аэродинамическую субмодель подают амплитуды движения жесткого корпуса самолета и движения упругого корпуса самолета в качестве входных параметров.
25. Способ по п.20, в котором расчет аэродинамических сил производят для медленных движений поверхностей управления и самолета, при помощи аэродинамики устойчивого состояния.
26. Способ по п.25, в котором соответствующие аэродинамически важные коэффициенты получают за счет измерений в аэродинамической трубе.
27. Способ по п.20, в котором для быстрых движений поверхности и самолета, аэродинамические силы накладывают и рассчитывают как силы не установившегося состояния.
28. Способ по п.27, в котором силы не установившегося состояния рассчитывают при помощи функций Вагнера и Кюсснера.
29. Способ по п.26, 27 или 28, в котором влияния скоса потока вниз и бокового скоса потока дополнительно учитывают в аэродинамической модели.
30. Способ по п.20, в котором нелинейная модель содержит субмодель сил тяги, которую используют для расчета сил тяги  .
.
31. Способ по п.30, в котором расчет сил тяги производят с граничным условием, в соответствии с которым силы двигателя скомпенсированы силами сопротивления, воздействующими на самолет, при угле атаки, соответствующем устойчивому состоянию полета 1g уровня при постоянной силе тяги.
32. Способ по п.20, в котором нелинейная модель содержит подсистему оценки сигнала, которую используют для подачи измеренных значений  параметров самолета, требующихся для модели.
параметров самолета, требующихся для модели.
33. Способ по п.20, в котором нелинейная модель содержит подсистему нагрузки на конструкцию, которую используют для подачи внутренних нагрузок  , действующих в точках измерения на конструкции самолета.
, действующих в точках измерения на конструкции самолета.
34. Способ по п.33, в котором расчет внутренних нагрузок  производят путем суммирования сил.
производят путем суммирования сил.
35. Способ по п.14, в котором нелинейную модель реализуют в пространстве состояний с использованием нелинейного дифференциального уравнения первого порядка  и начального вектора состояния
и начального вектора состояния  .
.
36. Способ по п.35, в котором вектор  (индекс р) состояния
(индекс р) состояния
(2) делят на субвектор  состояния для движения жесткого тела и на вектор
состояния для движения жесткого тела и на вектор  для состояний, описывающих упругое движение самолета.
для состояний, описывающих упругое движение самолета.
37. Способ по п.35 или 36, в котором команды, посылаемые на поверхности управления, вводят в вектор  (индекс с) ввода управления
(индекс с) ввода управления
(3) в котором ux,1, ux,2 … ux,n представляют собой регулировки руля, рулей высоты, элеронов, интерцепторов и стабилизаторов.
38. Способ по п.35, в котором скорости порывов ветра на левой и правой сторонах самолета комбинируют как неизвестные параметры ввода возмущения в векторе  (индекс d) ввода возмущения
(индекс d) ввода возмущения
(4) в котором ugust, vgust, wgust описывают соответственно продольный, боковой и вертикальный компоненты скорости в системе координат самолета.
39. Способ по п.35, в котором скорости порывов ветра на левой и правой сторонах самолета, которые комбинируют как параметры ввода возмущения в векторе (индекс d) ввода возмущения, содержат дополнительные компоненты скорости
(4a) где Vgust,front, Vgust,fin, wgust,wing.l, Wgust.wing.r описывают соответственно передний или боковой компоненты скорости в системе координат самолета.
40. Способ по п.35, в котором стандартные сигналы измерения для пассажирского самолета, которыми являются углы Эйлера (Ф, Θ, Ψ) и "скорости корпуса" (pB, qB, rB) в системе координат самолета, а также боковая и вертикальная скорости  центра тяжести в системе отсчета среды и боковое и вертикальное ускорения
центра тяжести в системе отсчета среды и боковое и вертикальное ускорения  корпуса самолета вблизи от центра тяжести в системе координат самолета моделируют с использованием выходного уравнения измерения (5)
корпуса самолета вблизи от центра тяжести в системе координат самолета моделируют с использованием выходного уравнения измерения (5)
41. Способ по п.35, в котором реконструируемые внутренние нагрузки  и определяемые скорости порывов ветра добавляют в модель из выходных параметров при помощи заданного выходного уравнения
и определяемые скорости порывов ветра добавляют в модель из выходных параметров при помощи заданного выходного уравнения  (индекс о) (6)
(индекс о) (6)
42. Способ по п.34, в котором неизвестные скорости порывов ветра моделируют с использованием модели возмущения (7)

43. Способ по п.35, в котором путем замены выходного параметра модели возмущения  в нелинейном дифференциальном уравнении первого порядка получают в пространстве состояний нелинейную модель расстояния
в нелинейном дифференциальном уравнении первого порядка получают в пространстве состояний нелинейную модель расстояния
(8) в которой вектор  состояния содержит состояния
состояния содержит состояния  самолета и состояния
самолета и состояния  модели возмущения.
модели возмущения.
44. Способ по п.35, в котором путем добавления шума измерения в вектор w и замены ввода возмущения выходное уравнение измерения (5) нелинейной модели генерирует выходное уравнение измерения
(9) для обобщенной модели расстояния.
45. Способ по п.44, в котором путем замены ввода возмущения в заданном выходном уравнении  (6) получают заданное выходное уравнение обобщенной модели расстояния
(6) получают заданное выходное уравнение обобщенной модели расстояния
(10) которое позволяет производить расчет нагрузок на конструкцию и скоростей порывов ветра из состояния обобщенной модели и контролировать входные параметры.
46. Способ по п.35, в котором разности между реальными измеренными значениями выходного вектора  измерения и расчетными значениями
измерения и расчетными значениями  вектора, полученными при помощи обобщенной модели расстояния, подают назад на производную вектора состояния блока наблюдения при помощи матрицы
вектора, полученными при помощи обобщенной модели расстояния, подают назад на производную вектора состояния блока наблюдения при помощи матрицы  усиления блока наблюдения, причем элементы матрицы усиления блока наблюдения получают за счет проектирования аналогично фильтру Кальмана, за счет добавки шумовых процессов в обобщенную модель расстояния.
усиления блока наблюдения, причем элементы матрицы усиления блока наблюдения получают за счет проектирования аналогично фильтру Кальмана, за счет добавки шумовых процессов в обобщенную модель расстояния.
47. Способ по п.46, в котором элементы матрицы усиления блока наблюдения получают за счет цифровой минимизации функции J стоимости по отношению к элементам матрицы усиления блока наблюдения.
48. Способ по п.46 или 47, в котором матрицу усиления блока наблюдения разделяют на субматрицы  для состояний модели расстояния и
для состояний модели расстояния и  для состояний модели возмущения, причем субматрицу
для состояний модели возмущения, причем субматрицу  для состояний модели расстояния дополнительно разделяют на матрицы
для состояний модели расстояния дополнительно разделяют на матрицы  усиления обратной связи для состояний модели жесткого тела и
усиления обратной связи для состояний модели жесткого тела и  для состояний упругой конструкции самолета.
для состояний упругой конструкции самолета.
49. Способ по п.47, в котором используют только несколько выбранных элементов усиления блока наблюдения, связанных с устойчивостью и временем реакции, а остальные элементы устанавливают равными нулю.
| Панкевич А | |||
| А | |||
| Дискретная модель летательного аппарата для задач автоматизированного проектирования его динамической компоновки | |||
| Прикладная геометрия, вып.6 №13 (2004), с.35-43 | |||
| Белоусов А.И | |||
| Влияние упругости конструкции летательного аппарата на воспроизведение переменных нагрузок при прочностных испытаниях | |||
| Диссертация | |||
| - Новосибирск, 2003, |

