Изобретение относится к области авиационного приборного оборудования и предназначено для формирования в поле зрения летчика, пилотирующего самолет, специального подвижного индекса (маркера), указывающего требуемые величину и направление перемещения рычага управления двигателем (РУД) для компенсации ошибок управления скоростью в режиме ручного пилотирования в условиях действия возмущений различной природы.
С самого начала развития авиации основными управляемыми координатами движения самолета были высота и скорость полета. Естественно, что в качестве управляющих переменных использовались отклонение руля высоты и отклонение РУД. По мере совершенствования теории и практики автоматического управления полетом функции ручного управления передавались автопилоту и автомату тяги.
Таким образом, исторически сложилась структура управления в продольной плоскости, содержащая два канала: траекторный и скоростной. Причем, такая структура свойственна как системе автоматического управления, так и контурам ручного управления. В состав приборного оборудования кабины входят индикаторы различного функционального назначения. Важнейшими из них являются приборы, информирующие относительно пространственного положения самолета, в т.ч. индикаторы его линейных и угловых координат. Получили распространение образные или символьные индикаторы, помогающие пилоту составить достоверный «образ полета». Следующим уровнем информационной поддержки экипажа самолета являются командные и директорные указатели рекомендуемого траекторного движения самолета. При этом понятие директорного управления относится только к траекторному каналу. В поле зрения пилота, как в автоматическом, так и в ручном режимах формируется образная информация о пространственном положении самолета в виде квазитрехмерного символа самолета, директорией планки, «тангажной лесенки», «телеграфных столбов», «дороги в небе» и т.п.
Однако в режиме ручного управления скоростью пилоту представляется лишь количественная оценка текущей величины скорости или ее отклонения от некоторого заданного. Роль пилота состоит в обнулении этого отклонения путем смещения РУД. В условиях действия ветровых течений сложной структуры (типа сдвига ветра) или при изменении аэродинамических характеристик (вследствие выпуска механизации, сброса грузов на подвесках и т.п.) такая стратегия не является оптимальной и даже безопасной. Причина этого состоит в том, что управление положением РУД для получения требуемого закона изменения скорости возлагается на пилота. Учитывая инерционность и нелинейную динамику двигателя, управление скоростью в ручном режиме становится непростой задачей
Одним из маловероятных, но очень грозных атмосферных явлений считается сдвиг ветра. Он опасен тем, что структура течения воздушных масс в зоне сдвига ветра весьма неоднородна и поэтому реакция самолета трудно предсказуема и никогда не бывает известна. Эти обстоятельства затрудняют выработку рекомендаций по пилотированию и ограничивают возможности приобретения практического опыта пилотирования в процессе подготовки пилотов. Ввиду неподготовленности пилотов к встрече со сдвигом ветра имел место ряд тяжелых катастроф, детально описанных в публикациях [Bach R.Е., Wingrove R.C…, Zhao Y., Bryson A. Simple Analyses of Paths through Windshears and Downdrafts // AIAA Paper. 90-222.]. В них отмечается, что предпосылками к падению самолета были ошибочные действия пилотов, действовавших в соответствии с инструкцией и со своим интуитивным восприятием ситуации. Причиной этих катастроф и многих других летных происшествий является то, что пилот (так же, как и автоматическая система управления) действует, исходя из концепции двух каналов управления, каждый из которых минимизирует ошибку управления по одной координате, без учета их взаимного влияния.
Показательным является описание действий пилотов в ситуации встречи со сдвигом ветра при заходе на посадку самолета D-1011 в аэропорту г.Даллас (США) 2 августа 1985г. приведено в [Bach R.Е., Wingrove R.C. The Analysis of Airline Flight Records for Winds and Application to the Delta 191 Accident // AIAA Paper 86-2227]. При входе в зону действия встречного растекающегося потока воздуха от микропорыва на высоте около 400 м экипаж выполнил маневр набора высоты для гашения избыточной воздушной скорости. При попадании в область ядра микропорыва с нисходящим потоком экипаж предпринял ошибочную попытку сохранить траекторию, увеличив угол тангажа. При этом значительно упала путевая скорость. После восстановления воздушной скорости до начального глиссадного значения самолет попал в попутный слой воздуха, в результате чего воздушная скорость начала быстро падать. Когда запас на скорость сваливания составлял 18-20 км/час, экипаж перевел самолет в пикирование, чтобы предотвратить сваливание, но, не успев создать избытка тяги для разгона, потерял высоту и упал на землю в 2 км от взлетно-посадочной полосы. Это классический пример неудачной попытки стабилизировать скорость и положение на глиссаде с помощью руля высоты без достаточно энергичных действий сектором газа.
Имеющиеся описания ситуаций встречи со сдвигом ветра говорят о том, что в условиях сильных атмосферных течений сложной структуры традиционные алгоритмы автоматического управления, а также рекомендованная методика ручного пилотирования могут привести к неадекватному управлению самолетом с опасными последствиями.
Известен способ поддержки посадки для летательного аппарата [RU 2389659 C1, 20.05.2010], в котором измеряют текущий угол захода на посадку, текущую скорость полета и текущую высоту самолета над землей, предварительно определяют диапазон значений скорости захода на посадку, позволяющих осуществить полную остановку летательного аппарата на посадочной полосе и диапазон значений угла захода на посадку, позволяющих осуществить полную остановку летательного аппарата на взлетно-посадочной полосе, при этом вычисляют нижний порог общей энергии Einf, соответствующий ситуации, в которой текущая скорость захода на посадку V и текущий угол захода на посадку γ равны, соответственно, нижнему предельному значению Vinf и нижнему предельному значению γinf, вычисляют верхний порог общей энергии Esup, соответствующий ситуации, в которой текущая скорость захода на посадку γ и текущий угол захода на посадку 7 соответственно равны верхнему предельному значению γsup и верхнему предельному значению γsup, и- текущую общую энергию Е упомянутого летательного аппарата, затем осуществляют сравнение общей текущей энергии Е с нижним Einf и верхним Esup порогами общей энергии для получения индикации теоретической возможности для летательного аппарата остановиться на взлетно-посадочной полосе.
Недостатками упомянутого способа поддержки посадки являются следующие;
- Способ ориентирован на использование только на глиссадном участке захода на посадку,
- Способ констатирует только наличие избытка или недостатка полной энергии, но не указывает их количественное значение и, соответственно, не указывает величину компенсирующей реакции со стороны пилота,
- Способ не учитывает в явном виде влияние ветровых возмущений
Известно устройство поддержки посадки для летательного аппарата [RU 2389659 C1, 20.05.2010], которое содержит вычислитель, принимающий на своих входах регламентируемую высоту в опорной точке, массу т, текущую высоту h, текущую скорость захода на посадку V, текущий угол захода на посадку γ. нижнее предельное значение скорости Vinf, верхнее предельное значение скорости Vsup, нижнее предельное значение угла захода на посадку γinf и верхнее предельное значение угла захода на посадку γsup, а также опорную скорость захода на посадку Vr и опорный угол захода на посадку γr.
Вычислитель рассчитывает общую текущую энергию Е, нижний порог общей энергии Einf и верхний порог общей энергии Esup, а также индекс относительной величины полной энергии 
Вычислитель сравнивает индекс I1 с одним из порогов (равных 0 или 1) и выдает команду для отображения тревожных или сигнальных сообщений на экране. Недостатками устройства являются следующие:
- Устройство предназначено на использование только на глиссадном участке захода на посадку,
- Устройство индицирует только наличие избытка или недостатка полной энергии, но не указывает величину компенсирующей реакции со стороны пилота,
- Устройство не учитывает в явном виде влияние ветровых возмущений
Задачей настоящего изобретения является расширение технических возможностей бортового оборудования для повышения уровня информационной поддержки в режиме ручного пилотирования.
Техническим результатом способа формирования командного индекса для управления тягой двигателя самолета является повышение информированности пилота в условиях атмосферных возмущений сложной структуры, сокращение времени для оценки ситуации, снижение вероятности ошибочных действий экипажа самолета и улучшение качества ручного пилотирования.
Технический результат способа достигается тем, что измеряют текущие координаты и параметры движения самолета - дальность, боковое смещение, высоту, скорость, вводят эти параметры через блок связи с бортовым измерительным оборудованием в вычислительное устройство, распределяют введенные данные по блокам вычислительного устройства, определяют опорное значение полной энергии и удельной полной энергии, определяют текущее значение полной и удельной полной энергии, сравнивают величину опорной и текущей удельных энергий, определяют и визуализируют ошибку управления полной энергией путем формирования подвижного директорного индекса на экране командного пилотажного прибора в поле зрения пилота.
Техническим результатом устройства является расширение информационных возможностей бортового оборудования самолетов гражданской авиации, повышение ситуационной осведомленности пилота в условиях атмосферных возмущений сложной структуры, снижение стрессовой нагрузки в критических ситуациях и в итоге уменьшение вероятности летных происшествий.
Технический результат устройства формирования командного индекса для управления тягой двигателя самолета достигается тем, что содержит блок 1 связи с бортовым измерительным оборудованием, блок 2 вычисления координат V и h опорного профиля полета, блок 3 вычисления опорного значения полной энергии движения воздушного судна, блок 4 вычисления опорного значения энергетической высоты воздушного судна, блок 5 вычисления текущего значения полной энергии движения воздушного судна, блок 6 вычисления текущего значения энергетической высоты воздушного судна, блок 7 вычисления ошибки управления энергетической высотой и связи выходного сигнала с командным прибором в кабине пилота для передачи величины смещения командного индекса, при этом блок 1 соединен с блоком 2, блоком 4, блоком 5 и блоком 6, при этом блок 2 соединен с блоком 3, выход которого соединен со входом блока 4, а выход блока 5 соединен со входом блока 6 и выходы блоков 4 и 6 соединены с входами блока 7, выходной сигнал которого подается на командный прибор для отображения в поле зрения пилота дополнительного директорного индекса управления тягой двигателя рядом со шкалой высот.
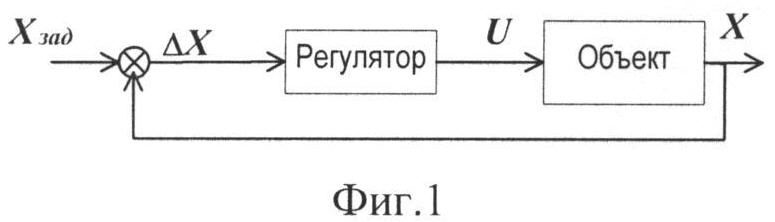
На фиг.1 изображена укрупненная структура традиционных систем управления.
На фиг.2 изображена укрупненная структура энергетической системы управления.
На фиг.3 изображена функциональная структура (схема, блок-схема) способа формирования величины ошибки управления полной энергией.
На фиг.4 показан экран КПП с дополнительным командным индексом управления тягой двигателя.
Настоящее изобретение предназначено для сообщения пилоту рекомендаций, или подсказок по управлению тягой с целью компенсации влияния атмосферных и любых других возмущений неординарной структуры. Рекомендации строятся на основании объективных оценок текущего энергетического состояния самолета в подобных ситуациях Методологической базой изобретения является энергетический подход к управлению движением летательных аппаратов (ЛА).
Суть его заключается в следующем. Структура традиционных систем управления движением ЛА может быть представлена обобщенной эквивалентной схемой на Фиг.1. Управление U в контуре обратной связи формируется на базе отклонений ΔХ некоторого подмножества вектора выходных переменных состояния X. Функционал качества выбирается в классе Qx=Qx(U,X,ΔХ).
В соответствии с энергетической концепцией управления, регулируемой величиной является полная энергия движения Е. Структура энергетической системы с обратной связью по полной энергии ЛА приведена на Фиг.2. Функционал качества также задается в форме QE=QE(U,Е,ΔЕ).
Основные количественные соотношения энергетического подхода устанавливает уравнение баланса энергий:

Или в приращениях 
Здесь HE - удельная энергия - 
Поскольку удельная энергия имеет размерность единиц длины, то она также называется энергетической высотой.
Члены в правой части уравнения обозначают работу двигателя, сил аэродинамического сопротивления и работу ветра. Уравнение баланса энергий отражает связи всех источников и потребителей энергии в системе «самолет - силовая установка - внешняя среда».
Атмосферные возмущения влияют не только на скорость, но и, как следует из уравнения баланса энергий, на полную энергию. Результаты зарубежных исследований показали, что классность пилотов напрямую зависит от наличия у пилотов «чувства полной энергии». А при недостаточно развитом чувстве полной энергии интерпретировать такую приборную информацию как меру его энергетического состояния самолета весьма затруднительно.
Анализ уравнения баланса энергий указывает, что единственным управляемым источником полной энергии самолета является работа силы тяги двигателя, а аэродинамические силы и переносное движение окружающих воздушных масс являются неконтролируемыми возмущающими потребителями энергии.
Отсюда следует, что при изменении уровня полной энергии под влиянием внешних факторов необходимо создать компенсирующую реакцию двигателя (в пределах ограничений на его тяговые и разгонные характеристики). Автоматическая система, построенная по энергетическому принципу, непосредственно реализует количественные соотношения уравнения баланса энергий, а именно, обнуляет ошибку полной энергии путем воздействия на тягу двигателя.
В соответствии с принятой концепцией управления полной энергией объекта, найден способ вычисления ошибки полной энергии, для компенсации которой необходима соответствующая реакция двигателя. Величина корректирующей реакции рассчитывается следующим образом.
Для каждой заданной или опорной траектории полета, в том числе по глиссаде, существуют закономерности изменения основных параметров движения - скорости V(t)зад и h(t)зад высоты. По этим пространственным координатам может быть вычислена функция изменения энергетической высоты

С другой стороны, по измерениям текущих координат может быть рассчитано фактическое значение этой величины 
Тогда ошибка δHE(t)=HE(t)зад-HE(t) будет характеризовывать избыток (или недостаток) полной удельной энергии самолета при выполнении маневров или действии возмущений.
Предлагается использовать величину отклонения уровня полной энергии от требуемого δНE(t) в качестве командного индекса управления двигателем в директорном режиме. Функциональная структура способа вычисления величины ошибки приведена на Фиг.3.
Для информирования пилота об ошибке δНE(t) предлагается индикация ее текущего значения на экране пилотажного прибора в форме подвижного маркера (Фиг.4). Поскольку ошибка управления выражается в единицах полной удельной энергии и имеет размерность линейных метров, то командный индекс этой ошибки логично размещать рядом со шкалой высот на КПП.
При ручном режиме пилотирования пилот должен манипулировать сектором газа двигателя таким образом, чтобы совместить директорный индекс с нулевой отметкой. Тем самым будет обнулена ошибка управления полной энергией, что и будет обеспечивать наиболее рациональные переходные процессы при действии внешних возмущений. При этом изменяется традиционная манера пилотирования, но обеспечивается поддержание баланса энергий самолета в соответствии с физическими основами движения в возмущенной среде. Функционально «энергетический индекс» аналогичен тому, как используются различные формы директорных индексов для помощи пилоту при ручном управлении траекторией. Наличие такой подсказки поможет приобрести «чувство полной энергии» пилоту самолета, облегчит ручное управление или будет служить индикатором обобщенной ошибки при автоматическом управлении. В автоматическом режиме этот индекс служит для оповещения экипажа с целью контроля энергетического состояния самолета, чтобы при необходимости вмешаться в работу автоматической системы.
Устройство содержит блок 1 связи с бортовым измерительным оборудованием, блок 2 вычисления координат V и h опорного профиля полета, блок 3 вычисления опорного значения полной энергии движения воздушного судна, блок 4 вычисления опорного значения энергетической высоты воздушного судна, блок 5 вычисления текущего значения полной энергии движения воздушного судна, блок 6 вычисления текущего значения энергетической высоты воздушного судна, блок 7 вычисления ошибки управления энергетической высотой и связи выходного сигнала с командным прибором в кабине пилота для передачи величины смещения командного индекса, при этом блок 1 соединен с блоком 2, блоком 4, блоком 5 и блоком 6, при этом блок 2 соединен с блоком 3, выход которого соединен со входом блока 4, а выход блока 5 соединен со входом блока 6 и выходы блоков 4 и 6 соединены с входами блока 7, выходной сигнал которого подается на командный прибор для отображения в поле зрения пилота дополнительного директорного индекса 8 управления тягой двигателя рядом со шкалой высот 9.
Устройство работает следующим образом. Измеряют текущие координаты и параметры движения самолета - дальность, боковое смещение, высоту, скорость, вводят эти параметры через блок связи с бортовым измерительным оборудованием в вычислительное устройство, распределяют введенные данные по блокам вычислительного устройства, определяют опорное значение полной энергии и удельной полной энергии, определяют текущее значение полной и удельной полной энергии, сравнивают величину опорной и текущей удельных энергий, определяют и визуализируют ошибку управления полной энергией путем формирования подвижного директорного индекса на экране командного пилотажного прибора в поле зрения пилота.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА ОПОВЕЩЕНИЯ ПИЛОТА О ДИСТАНЦИИ ТОРМОЖЕНИЯ ВОЗДУШНЫХ СУДОВ НА ЭТАПЕ ПОСАДКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2781533C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2002 |
|
RU2207514C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| Способ формирования у пилота достоверного образа полета при пилотировании по приборам | 2018 |
|
RU2689086C1 |
| СПОСОБ И УСТРОЙСТВО ПОДДЕРЖКИ ПОСАДКИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2389659C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2013 |
|
RU2539708C1 |
| УСТРОЙСТВО ОТОБРАЖЕНИЯ ИНФОРМАЦИИ, СИСТЕМА ОБЛЕГЧЕНИЯ ПИЛОТИРОВАНИЯ И СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ | 2011 |
|
RU2544283C2 |


Изобретение относится к области авиационного приборного оборудования. Способ формирования командного индекса для управления тягой двигателя самолёта включает в себя измерение текущей координаты и параметров движения самолета, введение этих параметров в вычислительное устройство, определение опорного значения полной энергии и удельной полной энергии, определение текущего значения полной и удельной полной энергии, сравнение величины опорной и текущей удельных энергий, определение и визуализацию ошибки управления полной энергией путем формирования подвижного директорного индекса на экране командного пилотажного прибора. Устройство формирования командного индекса для управления тягой двигателя самолета содержит блок 1 связи с бортовым измерительным оборудованием, блок 2 вычисления координат V и h опорного профиля полета, блок 3 вычисления опорного значения полной энергии движения, блок 4 вычисления опорного значения энергетической высоты, блок 5 вычисления текущего значения полной энергии движения, блок 6 вычисления текущего значения энергетической высоты, блок 7 вычисления ошибки управления энергетической высотой, выходной сигнал которого подается на командный прибор для отображения в поле зрения пилота дополнительного директорного индекса управления тягой двигателя. Повышается надёжность управления и безопасность полётов. 2 н.п. ф-лы, 4 ил.
1. Способ формирования командного индекса для управления тягой двигателя самолета, характеризующийся тем, что измеряют текущие координаты и параметры движения самолета - дальность, боковое смещение, высоту, скорость, вводят эти параметры через блок связи с бортовым измерительным оборудованием в вычислительное устройство, распределяют введенные данные по блокам вычислительного устройства, определяют опорное значение полной энергии и удельной полной энергии, определяют текущее значение полной и удельной полной энергии, сравнивают величину опорной и текущей удельных энергий, определяют и визуализируют ошибку управления полной энергией путем формирования подвижного директорного индекса на экране командного пилотажного прибора в поле зрения пилота.
2. Устройство формирования командного индекса для управления тягой двигателя самолета, характеризующееся тем, что содержит блок 1 связи с бортовым измерительным оборудованием, блок 2 вычисления координат опорного профиля полета V и h, блок 3 вычисления опорного значения полной энергии движения воздушного судна, блок 4 вычисления опорного значения энергетической высоты воздушного судна, блок 5 вычисления текущего значения полной энергии движения воздушного судна, блок 6 вычисления текущего значения энергетической высоты воздушного судна, блок 7 вычисления ошибки управления энергетической высотой и связи выходного сигнала с командным прибором в кабине пилота для передачи величины смещения командного индекса, при этом блок 1 соединен с блоком 2, блоком 4, блоком 5 и блоком 6, причем блок 2 соединен с блоком 3, выход которого соединен со входом блока 4, а выход блока 5 соединен со входом блока 6 и выходы блоков 4 и 6 соединены с входами блока 7, выходной сигнал которого подается на командный прибор для отображения в поле зрения пилота дополнительного директорного индекса, размещенного на шкале высот.
| СПОСОБ И УСТРОЙСТВО ПОДДЕРЖКИ ПОСАДКИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2389659C1 |
| FR 2902081 A1, 14.12.2007 | |||
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ САМОЛЕТА | 1992 |
|
RU2025414C1 |
| Система ориентации и стабилизации | 1981 |
|
SU966669A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗАХОДА САМОЛЁТА НА ПОСАДКУ ПО ПАРАМЕТРАМ ПОЛЁТА | 2010 |
|
RU2444706C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |

