Изобретение относится к сведению к минимуму динамических нагрузок на конструкцию самолета, создаваемых внешним возбуждением.
Динамические структурные нагрузки прикладываются к конструкции самолета внешними возбуждениями, например в результате воздействия ветра, порывов ветра, турбулентностей или аналогичного влияния, и в результате возбуждения, связанного с запросами системы управления пилота/автопилота. Из-за гибкости конструкции самолета такие возбуждения могут привести к колебаниям или вибрациям, которые могут превысить заданную величину и оказаться вредными для конструкции самолета, в частности, на частотах в диапазоне частоты собственного резонанса или частоты собственных колебаний гибкой конструкции самолета. Если требуется уменьшить массу конструкции самолета при высоком соотношении размеров крыла и фюзеляжа, необходимо принимать меры против чрезмерных динамических нагрузок на конструкцию.
Из документа DE 19841632 С2 известен способ компенсации колебаний конструкции самолета, вводимых внешним возбуждением, содержащий: детектируют, по меньшей мере, одну из скорости корпуса самолета с помощью компоновки датчиков, предоставляют упомянутую, по меньшей мере, одну скорость корпуса в автопилот, и генерируют движение поверхностей управления самолета для сведения к минимуму возбужденных колебаний.
Кроме того, из US 5515444 известна активная система управления шумом, предназначенная для снижения шумов в канале двигателя самолета турбовентиляторного двигателя, компрессор которого генерирует основное звуковое поле. Система активного управления шумами содержит датчик прохождения лопатки, установленный в двигателе рядом с вентилятором для генерирования опорного акустического сигнала, который коррелирован с излучаемым звуком, и датчик распределенной ошибки, расположенный так, что он измеряет основное звуковое поле для генерирования акустического сигнала ошибки. Средство акустического привода состоит из массива панели с пьезоэлектрическим приводом, который установлен во входном отверстии вентилятора двигателя для компенсации упомянутого шумового первичного звукового поля. Контроллер, измеряя опорный акустический сигнал и акустический сигнал ошибки, обеспечивает управление средством акустического привода для генерирования вторичного звукового поля, имеющего приблизительно равную амплитуду, но противоположную фазу, с упомянутым первичным звуковым полем, чтобы таким образом эффективно снизить шум двигателя.
Цель настоящего изобретения состоит в обеспечении эффективного сведения к минимуму динамических нагрузок на конструкцию самолета.
Эта цель достигается с помощью способа сведения к минимуму динамических нагрузок на конструкцию самолета, вводимых внешним возбуждением в соответствии с п.1. формулы изобретения, кроме того, эта цель достигается с помощью устройства, предназначенного для сведения к минимуму динамических нагрузок на конструкцию самолета, вводимых внешним возбуждением в соответствии с п.15 формулы изобретения.
Дополнительные свойства изобретения включены в соответствующие зависимые пункты формулы изобретения.
Изобретение направлено на способ сведения к минимуму динамических нагрузок на конструкцию самолета, вводимых внешним возбуждением самолета, содержащий: генерируют сигнал, обозначающий внешнее возбуждение; получают сигналы предварительного управления для активации элементов управления самолета по упомянутому сигналу, обозначающему возбуждение в соответствии с правилом предварительного управления для уменьшения подводимых к самолету динамических нагрузок на конструкцию; генерируют сигнал ошибки, представляющий рабочие характеристики упомянутого предварительного управления; оптимизируют правила предварительного управления по упомянутому сигналу ошибки и/или упомянутому сигналу, обозначающему возбуждение, таким образом, чтобы свести к минимуму динамические нагрузки на конструкцию.
Генерирование упомянутого сигнала, представляющего рабочую характеристику упомянутого предварительного усиления, в качестве сигнала ошибки может индицировать нагрузки на конструкцию самолета.
Генерирование упомянутого сигнала, обозначающего возбуждение, может включать в себя: детектируют сигналы, обозначающие одну или больше из интенсивности и направления турбулентности, ветра и порывов ветра, угла атаки, угла рыскания и углов Эйлера. Информация о запросах пилота/FCS (ЗСУ, замкнутой системы управления) может быть добавлена к сигналу, обозначающему возбуждение для сведения к минимуму индуцированных пилотом нагрузок/вибраций.
Генерирование упомянутого сигнала ошибки может включать в себя: детектируют сигналы, обозначающие одно или больше из ускорений, напряжений или растяжений в заданных местах конструкции самолета.
Генерирование упомянутого сигнала ошибки может включать в себя: вычитают вклад команд пилота или автопилота для управления поверхностями самолета, которые включены в нагрузку на конструкцию. Упомянутое вычитание влияния команд пилота или команд автопилота может осуществляться на основе модели жесткого тела самолета.
Упомянутый сигнал, обозначающий возбуждение, можно генерировать по модели гибкого тела самолета или с помощью наблюдателя/фильтра Кальмана.
Упомянутая оптимизация правила предварительного управления может включать в себя: разделяют частоты для вычитания влияния команд автопилота или пилота. Оптимизация правила предварительного управления может включать в себя итеративный алгоритм.
Упомянутая активация элементов управления для сведения к минимуму динамических нагрузок на конструкцию может включать в себя активацию одного или больше из руля высоты, руля направления, элерона или других поверхностей управления самолетом. Упомянутая активация элементов управления для сведения к минимуму динамических нагрузок на конструкцию может включать в себя: активируют один или больше электромеханических, электромагнитных, гидравлических, пневматических или пьезоэлектрических устройств привода для приложения сил, демпфирующих нагрузку, непосредственно к конструкции самолета.
Оптимизация упомянутого правила предварительного управления может включать в себя: генерируют передаточные функции или любые математические модели самолета.
Упомянутое генерирование передаточной функции может осуществляться с помощью постоянно включенной идентификацией системы, содержащей фильтрацию ограниченного по полосе случайного шума или сигнала с частотной модуляцией, или любого другого сигнала идентификации с помощью n адаптивных фильтров, где n соответствует количеству передаточных функций самолета, которые должны быть идентифицированы, и вычитания отклика фильтрации в форме вектора из сигнала ошибки. Идентификация системы может включать в себя оценку первичного пути управления. (Для уменьшения вибрации/нагрузки на конструкцию самолета можно легко оценить вторичный путь управления по первичному пути управления, и первичный путь управления легче идентифицировать, чем вторичный путь.)
Кроме того, настоящее изобретение направлено на устройство сведения к минимуму динамических нагрузок на конструкцию самолета, подводимых внешним возбуждением к самолету, содержащее блок генерирования сигнала возбуждения, предназначенный для генерирования сигнала, обозначающего внешнее возбуждение конструкции самолета; контур регулирования, предназначенный для подачи сигнала предварительного управления из упомянутого сигнала, обозначающего возбуждение, в соответствии с правилом предварительного управления, для активации элементов управления самолета, для снижения подводимых к самолету динамических нагрузок на конструкцию; блок генерирования сигнала ошибки, предназначенный для генерирования сигнала, представляющего рабочие характеристики упомянутого предварительного управления, в виде сигнала ошибки; контур оптимизации, предназначенный для оптимизации правила предварительного управления по упомянутому сигналу ошибки и/или сигналу, обозначающему возбуждение таким образом, чтобы сводить к минимуму динамические нагрузки на конструкцию.
Упомянутый блок генерирования сигнала ошибки может быть предназначен для генерирования упомянутого сигнала, представляющего рабочие характеристики упомянутого предварительного управления, в качестве сигнала ошибки, который должен обозначать нагрузки на конструкцию самолета.
Упомянутый блок генерирования сигнала возбуждения может включать в себя датчик, предназначенный для детектирования сигналов, обозначающих одну или больше из интенсивностей и направлений турбулентности, ветра и порывов ветра, угла атаки, угла рыскания и углов Эйлера.
Упомянутый блок генерирования сигнала ошибки может быть предусмотрен для детектирования сигналов, обозначающих одно или больше ускорений, напряжений или растяжений в заданных местах конструкции самолета. Кроме того, блок генерирования сигнала ошибки может быть предназначен для вычитания вклада команд пилота или автопилота при управлении управляющими поверхностями самолета, которые включены в нагрузку на конструкцию.
Упомянутый блок генерирования сигнала ошибки также может быть предназначен для вычитания влияния команд пилота или команд автопилота на основе модели жесткого тела самолета.
Упомянутый блок генерирования сигнала возбуждения может быть предназначен для генерирования сигнала, обозначающего возбуждение по модели гибкого тела самолета, или на основе наблюдателя/фильтра Кальмана.
Упомянутый контур оптимизации может включать в себя сепаратор частоты для оптимизации правила предварительного управления путем разделения частоты для того, чтобы обеспечить возможность нейтрализовать частотные диапазоны, в которых контроллер не должен оказывать какое-либо влияние. Упомянутый контур оптимизации может быть предназначен для оптимизации правила предварительного управления с использованием итеративного алгоритма.
Элементы управления, которые активируют для оптимизации динамических нагрузок на конструкцию, могут включать в себя один или больше из руля высоты, руля направления, элерона или других поверхностей управления самолета. Кроме того, элементы управления, которые активируют для сведения к минимуму динамических нагрузок на конструкцию, могут включать в себя одни или больше электромеханических, электромагнитных, гидравлических, пневматических или пьезоэлектрических исполнительных устройств, предназначенных для приложения сил, демпфирующих нагрузку, непосредственно к конструкции самолета.
Упомянутый контур оптимизации может быть предназначен для генерирования передаточной функции самолета для оптимизации упомянутого правила предварительного управления. Контур оптимизации также может быть предназначен для генерирования передаточной функции с использованием постоянно включенной системы идентификации, которая содержит фильтрацию сигналов, ограниченных по частоте, или сигнала с частотной модуляцией с помощью множества n адаптивных фильтров, где n соответствует количеству передаточных функций самолета, которые должны быть идентифицированы, и для вычитания отклика фильтрации в форме вектора из сигнала ошибки.
Ниже раскрыты варианты выполнения настоящего изобретения со ссылкой на чертежи, на которых:
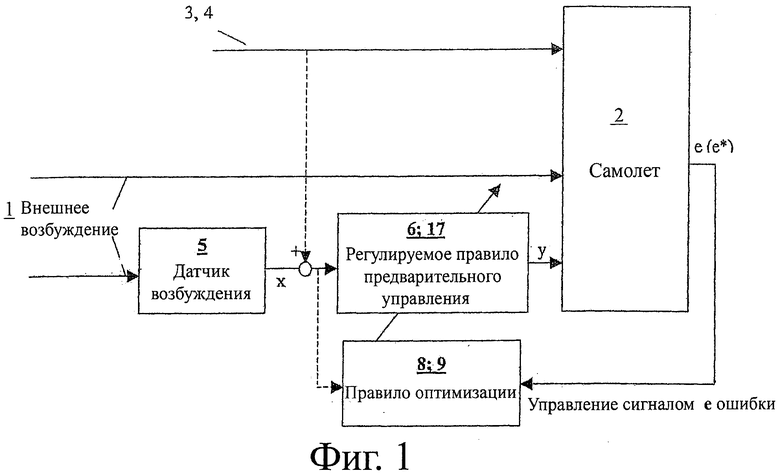
на фиг.1 показана блок-схема для раскрытия способа и устройства сведения к минимуму динамических нагрузок на конструкцию, подводимых от внешнего возбуждения, вызванного действиями пилота/ЗСУ к самолету в соответствии с одним вариантом выполнения изобретения;
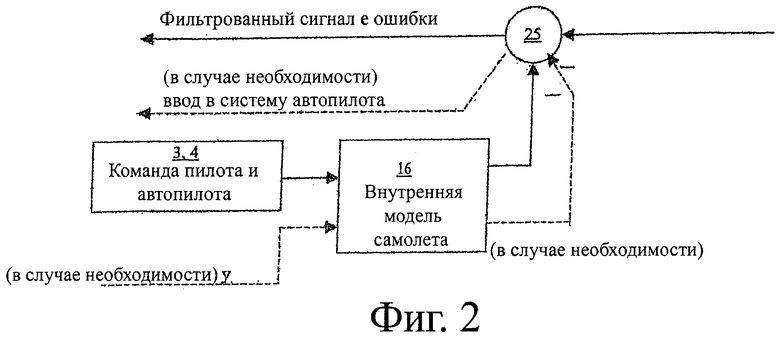
на фиг.2 показана блок-схема, предназначенная для описания генерирования сигнала ошибки, который используется в настоящем изобретении;
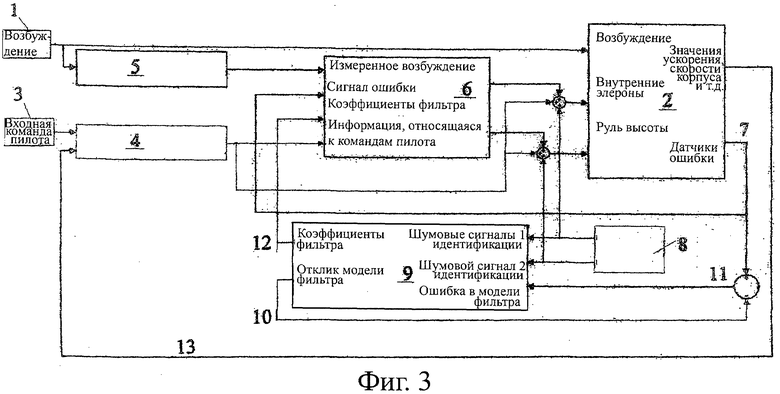
на фиг.3 показана блок-схема, описывающая дополнительны вариант выполнения способа и устройства сведения к минимуму динамических конструктивных нагрузок самолета, вводимых внешним возбуждением, в соответствии с настоящим изобретением;
на фиг.4 показана блок-схема контура адаптивной предварительной регулировки или предварительного управления, используемого в варианте выполнения настоящего изобретения;
на фиг.5 показана другая блок-схема, предназначенная для описания адаптивного предварительного управления;
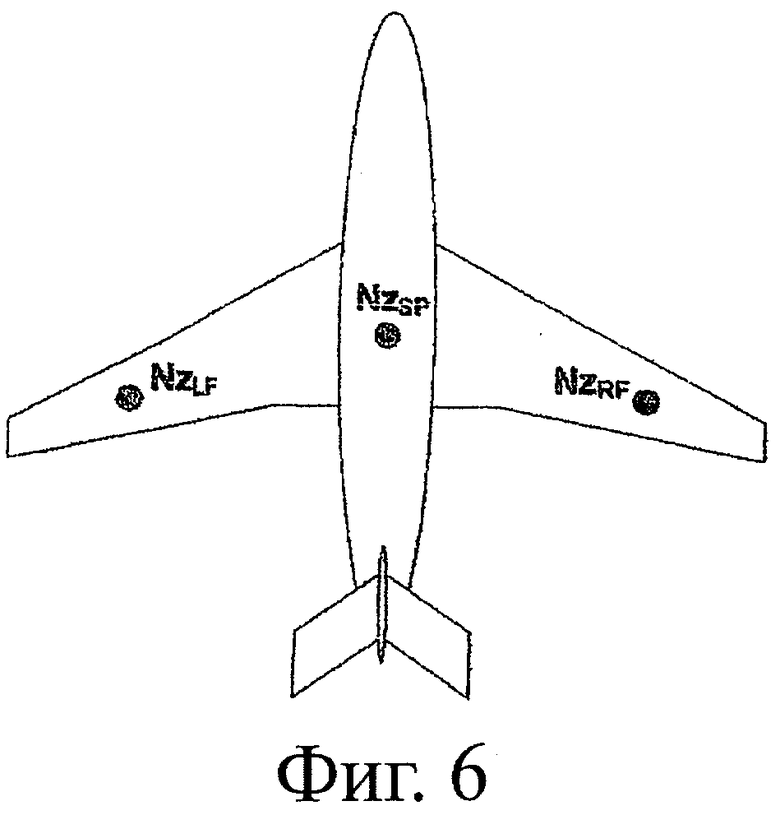
на фиг.6 схематично представлен самолет, на котором показано расположение датчиков, которое можно использовать в соответствии с одним вариантом выполнения настоящего изобретения для сведения к минимуму динамических нагрузок на конструкцию самолета; и
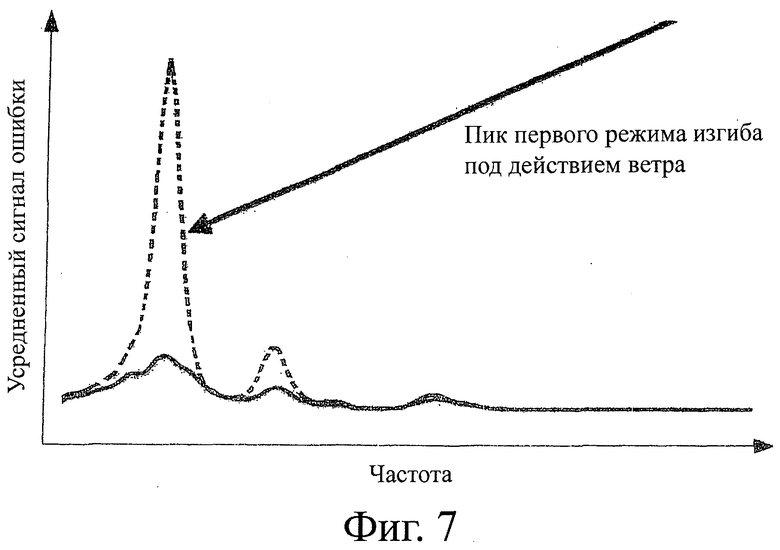
на фиг.7 показана схема, на которой представлена величина усредненного сигнала ошибки, которая обозначает нагрузки на конструкцию, подводимые в результате внешнего возбуждения к самолету, в зависимости от частоты.
На фиг.1 представлен один принципиальный вариант выполнения сведения к минимуму динамических нагрузок на конструкцию самолета 2, которые подводятся в результате внешнего возбуждения 1. Внешнее возбуждение 1 может быть связано, например, с ветром, порывами ветра или турбулентностью. Возбуждение 1 создает динамические нагрузки на конструкцию самолета 2, в частности на частоте резонанса или на частоте собственных колебаний в пределах конструкции, благодаря гибким свойствам корпуса самолета. На фиг.1 возбуждение 1 подводится к самолету 2, который рассматривается как гибкое тело.
Возбуждение 1 представлено датчиком 5 возбуждения или опорного сигнала, который генерирует сигнал х, обозначающий внешнее возбуждение 1, опорный датчик 5 в данном случае, представляет собой один или больше датчиков или компоновок датчика. Сигнал х, обозначающий внешнее возбуждение 1, вводят в схему 6, 17 адаптивного предварительного управления для получения сигнала управления для привода в действие элементов управления самолета 2 в соответствии с правилом предварительного управления, которое воплощено в упомянутой схеме 16, 17 адаптивного предварительного управления. Сигналы y управления для привода в действие элементов управления уменьшают динамические нагрузки на конструкцию, которые прикладываются к самолету 2 внешним возбуждением 1. Сигналы y управления подводят к самолету 2 с тем, чтобы привести в действие предусмотренные в нем элементы управления.
В самолете 2 генерируется сигнал, обозначающий нагрузки на конструкцию, которые поступают к самолету от упомянутого внешнего возбуждения 1, и эти сигналы используют как сигнал е, е* ошибки, и который описывает характеристики управления правила предварительного управления схемы 6, 17. Сигнал е, е* ошибки поступает в схему 8, 9 для оптимизации правила предварительного управления по упомянутому сигналу е, е* ошибки, для сведения к минимуму динамических нагрузок на конструкцию, то есть для уменьшения амплитуды колебаний конструкции самолета 2. Оптимизация в схеме 8, 9 выполняется таким образом, что обеспечивается минимизация колебаний, и динамические нагрузки на конструкцию адаптируют к фактической нагрузке и условиям полета самолета 2. Если правило оптимизации не будет итеративным, сигнал х также используется для оптимизации схемы 6, 17 регулируемого правила предварительного управления.
Датчик 5 опорного сигнала может содержать множество датчиков, которые детектируют интенсивность и направление ветра, турбулентности и порывов ветра, угол атаки, угол рыскания, и т.д., например углы Эйлера. Сигнал е, е* ошибки, который детектируется датчиками ошибки самолета 2, может включать в себя, например, ускорение в разных заданных местах конструкции самолета, а также напряжения или растяжения в заданных местах конструкции самолета. Элементы управления самолета 2, которые активируют для сведения к минимуму динамических нагрузок на конструкцию, могут включать в себя руль высоты, руль направления, элерон или другие поверхности управления, и они могут включать в себя электромеханические, электромагнитные, гидравлические, пневматические или пьезоэлектрические исполнительные устройства для непосредственного приложения сил, демпфирующих нагрузку, к конструкции самолета.
Далее, в качестве конкретного варианта, команды 3, 4 пилота или системы автопилота, которые также могут индуцировать нежелательные нагрузки на конструкцию, и вибрации самолета 2 добавляют к сигналу х обозначения возбуждения. Таким образом, нагрузки на конструкцию и вибрации самолета, возникающие в результате команд пилота или автопилота, также сводят к минимуму.
Оптимизация правила предварительного управления может осуществляться соответствующим способом, то есть способами среднеквадратической ошибки или рекурсивными способами, по меньшей мере среднеквадратической ошибки (LMS (МСО) минимальной среднеквадратичной ошибки, RLS) или способами минимизации квадратичной функции стоимости.
На фиг.2 показано генерирование фильтрованного сигнала е ошибки. Здесь предусмотрена внутренняя модель 16 самолета 2 для вычитания вклада команд 3, 4 пилота или автопилота, которые выводят на поверхности управления самолета и создают нагрузки на конструкцию в результате соответствующего маневра во время полета. Однако эти команды не должны приводить в действие схемы 6, 17 предварительного управления. Это означает, что, конечно, команда пилота или команда автопилота обычно не должна быть компенсирована схемой 6, 17 предварительного управления, но вибрации, индуцированные пилотом, будут компенсированы. С этой целью внутренняя модель 16 представляет собой модель жесткого тела.
Сигналы, выводимые внутренней моделью 16 самолета, комбинируют в схеме 25 комбинирования с исходным сигналом е* ошибки для генерирования фильтрованного сигнала е ошибки, который выводят в схему 8, 9 оптимизации. В качестве альтернативы команды y управления для поверхностей управления самолетом могут быть введены во внутреннюю модель 16, и сигнал х, обозначающий внешнее возбуждение, может быть получен из схемы 25 комбинирования.
Если предполагается использовать внутреннюю модель 16 самолета 2 только для вычитания влияния команд пилота или команд автопилота из исходного сигнала е*, внутренняя модель 16 может представлять собой модель жесткого тела. Однако если внутренняя модель 16 предназначена для генерирования сигнала х, обозначающего внешнее возбуждение, она должна представлять собой полную модель гибкого тела самолета 2. Внутренняя модель также может использоваться для вычитания паразитной обратной связи из сигнала, обозначающего возбуждение.
На фиг.3 схематично показана блок-схема одного варианта выполнения устройства для сведения к минимуму динамических нагрузок на конструкцию самолета. Внешнее возбуждение 1, которое может быть ветром, порывами ветра или турбулентностью, прикладывается в конструкцию самолета 2. Возбуждение 1 вызывает вибрации или колебания, в частности, резонансные колебания или собственные колебания конструкции самолета. Самолетом 2 управляют с помощью команд пилота 3 и с помощью автопилота 4. Возбуждение 1 из-за ветра детектируют с помощью опорного датчика 5. Он может представлять собой лазерно-оптический датчик или датчики ветра других типов (например α - датчик, β - датчик).
Такой сигнал возбуждения или опорный сигнал, который включает в себя, в общем, трехмерную информацию о скорости и направлении ветра, подают в схему 6 предварительного управления для активации элементов управления самолета 2 с тем, чтобы уменьшить или свести к минимуму колебания конструкции и нагрузки на конструкцию самолета 2. Элементы управления могут представлять собой, как уже описано выше, руль высоты, руль управления, элерон или другие аэродинамически эффективные поверхности управления, и/или они могут представлять собой механические элементы управления для непосредственного сведения к минимуму нагрузок на конструкцию, электромеханические, электромагнитные, гидравлические, пневматические или пьезоэлектрические исполнительные устройства, предназначенные для приложения демпфирующих сил нагрузки непосредственно к конструкцию самолета.
Для адаптации и оптимизации на вход упомянутой схемы 6 предварительного управления поступает один или больше сигналов ошибки, генерируемых датчиками 7 ошибки, и эти сигналы ошибки детектируются в самолете 2, и их требуется свести к минимуму, и дополнительная информация, относящаяся к передаточным функциям самолета 2, которая предоставлена постоянно работающей идентификацией 9 системы, и информация, относящаяся к командам пилота и автопилота, которые не должны быть компенсированы системой сведения к минимуму нагрузок на конструкцию.
Постоянно работающая идентификация 9 системы подключена к генератору 8 случайного шума, который генерирует ограниченный в полосе случайный шум для каждого исполнительного устройства. Ни один из сигналов случайного шума не должен быть коррелирован с сигналом возбуждения или опорным сигналом. Передаточные функции для различных устройств привода не должны измеряться одновременно для обеспечения хорошего отношения сигнал - шум. Сигналы шума передают в исполнительные устройства или элементы управления для сведения к минимуму нагрузок на конструкцию и для идентификации 9 системы. В идентификации 9 системы сигналы шума идентификации пропускают через n адаптивных фильтров (например, типа FIR (КИХ), конечная импульсная характеристика, IIR (БИХ) бесконечная импульсная характеристика, нейронные сети и т.д.), где n представляет собой количество передаточных функций самолета, которые требуется идентифицировать.
Сущность этих адаптивных фильтров состоит в формировании модели фильтра самолета 2. Отклики 10 этой модели фильтра на шумовые сигналы идентификации вычитают в форме вектора с помощью средства 11 вычитания из сигналов ошибки, генерируемых датчиками 7 ошибки самолета 2. Те части сигналов ошибки, которые коррелируют с шумовыми сигналами идентификации, представляют собой отклики самолета 2 на шумовые сигналы идентификации. Результат такого векторного вычитания представляет ошибку между передаточными функциями самолета и моделью фильтра.
Коэффициенты 12 фильтра преобразуют в частотном поле и передают в адаптивную схему 6 предварительного управления. Адаптация коэффициентов 12 модели фильтра может быть выполнена с помощью алгоритма МСО или RLS, или другого алгоритма. Это позволяет использовать шумовые сигналы идентификации, генерируемые генератором 8, для гарантирования того, что в идентификации 9 системы будут рассматриваться только те части сигнала, выводимого датчиками 7 ошибки, которые коррелируют с шумовыми сигналами идентификации. Ускорения, значения скорости корпуса, и т.д. самолета 2 также вводят в автопилот 4.
Один вариант выполнения адаптивной схемы 6 предварительного управления показан на фиг.4. Как сигналы ошибки самолета 2, генерируемые датчиками 7 ошибки, так и опорные сигналы датчика 5 опорного сигнала (фиг.3) включают в себя общую информацию, связанную с командами пилота и автопилота. Для исключения непреднамеренной минимизации или компенсации команд пилота и автопилота системы сведения к минимуму динамической нагрузки на конструкцию вклад команд пилота и автопилота вычитают из опорного сигнала и сигналов ошибки с помощью схем 14 и 15 комбинирования, соответственно. Вклады или влияние команд 3, 4 пилота и автопилота датчиков 5 опорного сигнала и датчиков 7 ошибки рассчитывают с помощью внутренней модели 16 жесткого тела самолета 2. Такая внутренняя модель 16 включает в себя только механические свойства полета самолета, представленного в виде жесткого тела, и обычно хорошо известна при конструировании самолета.
Компенсированные сигналы ошибки и опорные сигналы вводят в схему 17 адаптивного предварительного управления вместе с коэффициентами частотного поля модели фильтра. Выходной сигнал схемы предварительного управления 17, обычно в векторной форме, поступает в модуль 18 проверки достоверности и на вход схемы 19 для оптимального распространения сигналов управления в разные исполнительные устройства 20 для минимизации нагрузок/вибрации конструкции.
Один вариант выполнения адаптивного предварительного управления представлен на фиг.5а. Адаптация адаптивного фильтра 24 может быть выполнена посредством итерационного алгоритма 23 возмущения, который изменяет коэффициенты фильтра на Δw и проверяет, будет ли сигнал ошибки уменьшаться или увеличиваться. Если сигнал ошибки будет уменьшаться, то коэффициент фильтра еще раз изменяют на Δw, в противном случае на - Δw и так далее. Для такого итерационного алгоритма не требуется информация о функциях передачи самолета, и не нужна непрерывно работающая системная идентификация.
Другой вариант выполнения адаптивного предварительного управления показан на фиг.5b. Компенсированный опорный сигнал, который включает в себя информацию, относящуюся к внешнему возбуждению, вводят в n адаптивных фильтров 22, где n представляет собой количество исполнительных устройств, демпфирующих нагрузки на конструкцию, умноженное на количество датчиков ошибки. Адаптивные фильтры выводят сигналы управления в модуль 18 проверки достоверности и в схему 19 для оптимального распределения сигналов управления между исполнительными устройствами 20 или элементами управления для минимизации нагрузок на конструкцию. Адаптация коэффициента фильтра может быть выполнена на основе алгоритма 21 фильтрованного-X-LMS, который представляет собой алгоритм, известный в уровне техники. Операция фильтрованного-Х может выполняться с коэффициентами модели фильтра постоянно работающей идентификации системы в поле частоты.
На фиг.6 показан вариант выполнения компоновки фильтра из трех датчиков для детектирования ускорений в направлении Z (ускорений, перпендикулярных поверхности крыла самолета). Датчики NzLF и NzRF ускорения расположены на кончиках крыльев, и NzSP предназначен для измерения z-ускорения центра тяжести самолета. Однако также возможно предусмотреть датчики ускорения в передней и/или задней частях фюзеляжа для измерения ускорения в направлениях y и z для демпфирования вертикальных и горизонтальных ускорений фюзеляжа.
Пример сведения к минимуму конструктивных нагрузок, прикладываемых к самолету внешним возбуждением из-за ветра, показан на фиг.7, в котором усредненный сигнал ошибки показан как функция частоты. Пунктирная линия представляет сигнал ошибки без минимизации нагрузки на конструкцию, в то время как сплошная линия представляет тот же сигнал с минимизацией нагрузки на конструкцию. Пик максимума показывает вибрацию с вертикальным изгибом крыла, то есть резонансные или собственные колебания, связанные с гибкими свойствами крыла. Можно видеть, что вибрация изгиба и поэтому нагрузки на конструкцию значительно уменьшились.
Список ссылочных позиций
1 возбуждение
2 самолет
3 команда пилота
4 команды автопилота
5 датчик опорного сигнала
6 схема адаптивного предварительного управления
7 датчик ошибки
8 генератор ограниченного по полосе шума или частотно-модулированного сигнала
9 идентификации системы
10 отклик модели фильтра
11 средство вычитания
12 коэффициенты фильтра
14 схема комбинирования
15 схема комбинирования
16 внутренняя модель самолета
17 адаптивное предварительное управление
18 модуль проверки достоверности
19 схема привода поверхности управления
20 исполнительные устройства (поверхности управления)
21 алгоритм МСО
22 адаптивный фильтр
23 итеративный алгоритм нарушения
24 адаптивный фильтр
25 схема комбинирования
x сигнал обозначения возбуждения
y сигнал управления
e* сигнал ошибки
e фильтрованный сигнал ошибки
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕКОНСТРУИРОВАНИЯ НАГРУЗОК ОТ ПОРЫВОВ ВЕТРА И/ИЛИ НАГРУЗОК НА КОНСТРУКЦИЮ ЛЕТАТЕЛЬНОГО АППАРАТА, В ЧАСТНОСТИ ПАССАЖИРСКОГО САМОЛЕТА | 2006 |
|
RU2413658C2 |
| АВТОПИЛОТ | 2013 |
|
RU2619675C2 |
| КОМБИНИРОВАННАЯ СИСТЕМА АКТИВНОЙ РУЧКИ И БУСТЕРНОГО ПРИВОДА УПРАВЛЕНИЯ | 2018 |
|
RU2769358C2 |
| СИСТЕМА И СПОСОБЫ УПРАВЛЕНИЯ С ПОМОЩЬЮ АВТОПИЛОТА | 2013 |
|
RU2623792C2 |
| Способ и устройство управления вращением колес шасси самолета | 2021 |
|
RU2780699C1 |
| СИСТЕМА АВТОПИЛОТА, КОМПОНЕНТЫ И СПОСОБЫ | 2013 |
|
RU2652685C2 |
| ВЫСОКОЭФФЕКТИВНЫЙ СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ДЛЯ ПОЖАРОТУШЕНИЯ | 2019 |
|
RU2766035C1 |
| Способ управления самолётом в режиме системы автоматического управления "Посадка" | 2024 |
|
RU2830919C1 |
| ИНТЕРПРЕТАТОР ПОЛЕТА ДЛЯ ДЕМОНСТРАЦИИ БЕСПИЛОТНЫХ АВИАЦИОННЫХ СИСТЕМ С ВНЕШНЕЙ ПОДВЕСКОЙ | 2012 |
|
RU2605801C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2757549C2 |



Группа изобретений относится к авиационной технике и предназначена для использования при осуществлении снижения динамических нагрузок на конструкцию самолета, создаваемых внешним возбуждением. Согласно предложенному способу генерируют сигнал (х), обозначающий внешнее возбуждение, получают сигналы (у) предварительного управления для привода в действие элементов управления самолета по сигналу (х) в соответствии с правилом предварительного управления для уменьшения динамических нагрузок на конструкцию. Генерируют также сигнал (е, е*) ошибки, представляющий рабочие характеристики предварительного управления. Оптимизирует правило предварительного управления по сигналу (е, е*) ошибки и/или сигналу (х) для сведения к минимуму динамических нагрузок на конструкцию. В предложенном устройстве имеются блок генерирования сигнала возбуждения, предназначенный для генерирования сигнала (х), схема регулирования для получения сигналов (у) управления для активации элементов управления самолета по сигналу (х) в соответствии с правилом предварительного управления для уменьшения динамических нагрузок на конструкцию самолета, блок генерирования сигнала ошибки, предназначенный для генерирования сигнала, представляющего рабочую характеристику предварительного управления в качестве сигнала ошибки (е, е*), и схема оптимизации для оптимизации правила предварительного управления по сигналу (е, е*) ошибки и/или сигналу (х) для сведения к минимуму динамических ошибок на конструкцию. Группа изобретений обеспечивает эффективное сведение к минимуму динамических нагрузок на конструкцию самолета. 2 н. и 26 з.п. ф-лы, 7 ил.
1. Способ сведения к минимуму динамических нагрузок на конструкцию самолета, прикладываемых из-за внешнего возбуждения (1) к самолету (2), в котором
генерируют сигнал (х), обозначающий внешнее возбуждение (1);
получают сигналы (у) предварительного управления для привода в действие элементов (20) управления самолета (2) по упомянутому сигналу (х), обозначающему возбуждение, в соответствии с правилом предварительного управления для уменьшения динамических нагрузок на конструкцию, прикладываемых к самолету (2);
генерируют сигнал (е, е*) ошибки, представляющий рабочие характеристики упомянутого предварительного управления, и
оптимизирует правило предварительного управления по упомянутому сигналу (е, е*) ошибки, и/или используя сигнал (х), обозначающий возбуждение, для сведения к минимуму динамических нагрузок на конструкцию.
2. Способ по п.1, в котором упомянутый сигнал, представляющий рабочие характеристики упомянутого предварительного управления, в качестве сигнала (е) ошибки, обозначает нагрузки на конструкцию самолета.
3. Способ по п.1 или 2, в котором генерирование упомянутого сигнала (х), обозначающего возбуждение, включает в себя детектирование сигналов, обозначающих одно или больше из интенсивности и направления турбулентности, ветра и порывов ветра, угла атаки, угла рыскания.
4. Способ по п.1, в котором информацию о командах пилота или системы автопилота добавляют к сигналу (х) обозначения возбуждения для уменьшения динамических нагрузок на конструкцию, вызванных такой командой пилота или системы автопилота.
5. Способ по п.1, в котором генерирование упомянутого сигнала (е, е*) ошибки включает в себя детектирование сигналов, обозначающих одно или больше из ускорений, напряжений или растяжений в заданных местах конструкции самолета.
6. Способ по п.1, в котором генерирование упомянутого сигнала (е, е*) ошибки включает в себя вычитание вклада команд (3, 4) пилота или автопилота для поверхностей управления самолета (2), которые включены в нагрузки на конструкцию.
7. Способ по п.6, в котором упомянутое вычитание влияния команд (3, 4) пилота или автопилота осуществляют на основе модели (16) жесткого тела самолета (2).
8. Способ по п.1, в котором упомянутый сигнал (х), обозначающий возбуждение, генерируют по модели (16) гибкого тела самолета (2) или по блоку наблюдения/фильтру Калмана.
9. Способ по п.1, в котором упомянутая оптимизация правила предварительного управления включает в себя разделение частот для взаимной компенсации определенных диапазонов частоты, которыми не требуется управлять, в частности частотного диапазона команд пилота.
10. Способ по п.1, в котором оптимизация правила предварительного управления включает в себя итеративный алгоритм (23).
11. Способ по п.1, в котором упомянутая активация элементов (20) управления для сведений к минимуму динамических нагрузок на конструкцию включает в себя активирование одного или больше из руля высоты, руля направления, элерона или других поверхностей управления самолета (2).
12. Способ по п.1, в котором упомянутая активация элементов управления для сведения к минимуму динамических нагрузок на конструкцию включает в себя активирование одного или больше из электромеханических, электромагнитных, гидравлических, пневматических или пьезоэлектрических исполнительных устройств для приложения сил, демпфирующих нагрузку, непосредственно к конструкции самолета.
13. Способ по п.1, в котором оптимизация упомянутого правила предварительного управления включает в себя генерирование передаточной функции самолета (2).
14. Способ по п.13, в котором генерирование передаточной функции осуществляют с помощью постоянно работающей системы (9) идентификации, охватывающей фильтрацию ограниченного по полосе случайного шума или сигнала с частотной модуляцией с помощью множества n адаптивных фильтров (22), где n соответствует количеству передаточных функций самолета, которые требуется идентифицировать, и вычитание отклика фильтрации в форме вектора из сигнала ошибки.
15. Устройство для сведения к минимуму динамических нагрузок на конструкцию самолета, прикладываемых внешним возбуждением (1) к самолету, (2), содержащее
блок (5) генерирования сигнала возбуждения, предназначенный для генерирования сигнала (х), обозначающего внешнее возбуждение (1) конструкции самолета;
схему (6, 17) регулирования для получения сигналов (у) управления для активации элементов управления самолета (2) по упомянутому сигналу (х), обозначающему возбуждение, в соответствии с правилом предварительного управления для уменьшения динамических нагрузок на конструкцию, подводимых к самолету (2);
блок (7, 25) генерирования сигнала ошибки, предназначенный для генерирования сигнала, представляющего рабочую характеристику упомянутого предварительного управления в качестве сигнала ошибки (е, е*), и
схему (8, 9) оптимизации для оптимизации правила предварительного управления по упомянутому сигналу (е, е*) ошибки и/или сигналу (х), обозначающему возбуждение, для сведения к минимуму динамических ошибок на конструкцию.
16. Устройство по п.15, в котором упомянутый блок (7, 25) генерирования сигнала ошибки генерирует упомянутый сигнал, представляющий рабочую характеристику упомянутого предварительного управления, в качестве нового сигнала (е, е*) ошибки, обозначающего нагрузки на конструкцию самолета.
17. Устройство по п.15 или 16, в котором упомянутый блок (5) генерирования сигнала возбуждения включает в себя датчик для детектирования сигналов, обозначающих одну или больше из интенсивности и направления турбулентности, ветра и порывов ветра, угла атаки, угла рыскания.
18. Устройство по п.15, в котором в упомянутом блоке (7, 25) генерирования сигнала ошибки предусмотрено средство (7) детектирования сигналов, обозначающих одно или больше из ускорений, напряжений или растяжений в заданных местах конструкции самолета.
19. Устройство по п.15, в котором в упомянутом блоке (7, 25) генерирования сигнала ошибки предусмотрено средство (25) вычитания вкладов команд (3, 4) пилота или автопилота при управлении управляющими поверхностями самолета (2), которые включены в нагрузку на конструкцию.
20. Устройство по п.15, в котором в упомянутом блоке (7, 25) генерирования сигнала ошибки предусмотрено вычитание влияния команд (3, 4) пилота или автопилота на основе модели (16) жесткого тела самолета (2).
21. Устройство по п.15, в котором в упомянутом блоке (5) генерирования сигнала возбуждения предусмотрено генерирование сигнала, обозначающего возбуждение, из модели (16) гибкого тела самолета (2), или блока наблюдения/фильтра Калмана.
22. Устройство по п.15, в котором упомянутая схема оптимизации включает в себя сепаратор частоты для оптимизации правила предварительного
управления путем разделения частоты, для вычитания влияния команд (3, 4) пилота или автопилота.
23. Устройство по п.15, в котором упомянутая схема (8, 9) оптимизации предназначена для оптимизации правила предварительного управления с использованием итеративного алгоритма.
24. Устройство по п.15, в котором элементы (20) управления, которые активируют для сведения к минимуму динамических нагрузок на конструкцию, включают в себя один или больше из руля высоты, руля направления, элерона или других поверхностей управления самолета (2).
25. Устройство по п.15, в котором элементы (20) управления, которые активируют для сведения к минимуму динамических нагрузок на конструкцию, включает в себя одно или больше электромеханических, электромагнитных, гидравлических, пневматических или пьезоэлектрических исполнительных устройств для приложения сил демпфирования нагрузки, непосредственно к конструкции самолета.
26. Устройство по п.15, в котором упомянутая схема (8, 9) оптимизации предусмотрена для генерирования передаточной функции самолета для оптимизации упомянутого правила предварительного управления.
27. Устройство по п.26, в котором в схеме (8, 9) оптимизации предусмотрено генерирование передаточной функции с помощью постоянно работающей системы (9) идентификации, охватывающей фильтрацию ограниченного по полосе случайного шума или сигнала с частотной модуляцией с помощью множества n адаптивных фильтров, где n соответствует количеству передаточных функций самолета, которые должны быть идентифицированы, и вычитание отклика фильтрации в векторной форме из сигнала ошибки.
28. Устройство по п.15, в котором информацию о командах (3, 4) пилота или системы автопилота добавляют к сигналу (х) обозначения возбуждения для уменьшения динамических нагрузок на конструкцию, связанных с такой командой пилота или системой автопилота.
| DE 19841632 А1, 23.03.2000 | |||
| US 4796192 А, 03.01.1989 | |||
| Устройство для психофизиологических исследований | 1988 |
|
SU1528448A1 |
| US 2004079835 А1, 29.04.2004 | |||
| СПОСОБ ИЗМЕРЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2084851C1 |

