Область техники
Изобретение относится к области авиации, а именно к летным исследованиям ЛА, в которых используются тросовые системы (ЛА-буксировщик-трос-буксируемый объект), кроме того, результаты оценки положения буксируемого на тросе авиационного объекта используют для определения его аэродинамических характеристик и идентификации его системы управления, для отработки системы дозаправки в воздухе, повышения качества работы транспортировки грузов и сброс их с помощью тросовых систем, отработки систем противовоздушной обороны и средств борьбы с ними в условиях, близких к реальным.
Уровень техники
Существуют разные способы определения динамических параметров поведения авиационных тросовых систем (ТС) для управления буксируемым объектом (БО) в полнонатурных исследованиях (максимально близких к реальным) их в воздушном потоке. Они используются в известных алгоритмах БЦВМ для вычисления координат буксируемого авиационного объекта. При этом учитывается, что буксировщик может осуществлять разнообразные маневры, а также то, что БО, имеющий произвольные аэродинамические компоновки и системы управления, может управляться автономно. Требуется при этих условиях определить динамические величины параметров на тросе и у БО как в процессе стабилизации движения, так и в переходных процессах.
Использование тросовых систем в летных испытаниях является наименее затратной формой их проведения. Моделирование летно-технических характеристик ЛА с помощью тросовых систем широко используется (например, см. the US patent №5088663, 12/02/1992, «Method launching payload»), но существует значительная область, в которой в настоящее время не существует достоверной информации о поведении буксировочного троса и БО. Эта область касается, прежде всего, переходных процессов во время смены режимов буксирования. Хотя был наработан большой опыт в способах моделирования ТС с помощью различных математических алгоритмов и были даны оценки точности соответствия их истинным значениям в летных испытаниях, в общем, их использование для точного определения динамических параметров и координат троса и БО в реальном (или близком к нему) масштабе времени практически невозможно вследствие их громоздкости. Появление новых методов, которые позволили бы ввести процессы вычисления динамических параметров троса и БО как в реальном масштабе времени, так и близкому к нему, их координат при различных аэродинамических компоновках и системах управления БО, является до настоящего времени задачей нерешенной. Новые методы, обладающие такими характеристиками, необходимы не только при летных испытаниях, но и при проведении прочих работ по буксировке БО и грузов. Например, ранее изучаемую задачу о дозаправке самолетов в воздухе с помощью развертываемых в воздушном потоке шлангов можно было бы смоделировать на наземных стендах и использовать для наземной тренировки летчиков с помощью компьютерных тренажеров, экономя при этом значительные материальные средства, а также можно было бы с достаточной точностью отрабатывать десантирование техники с помощью ТС и ее сброс в заданные точки посадки. Рекомендации, основанные на точном знании динамики переходных процессов в режиме реального времени, могли бы упростить системы управления БО. Более точное определение динамики переходных процессов тросовых систем позволит упростить схему летных испытаний, что, в свою очередь, приведет к снижению материальных затрат по их проведению. Поскольку в настоящее время отсутствуют способы определения с высокой точностью динамических параметров и координат троса и БО, то используется дорогостоящий метод прямого считывания и вычисления этих данных с помощью средств радиолокационного и спутникового слежения.
Способ прямого вычисления текущего положения троса и буксируемого ЛА осуществляется с помощью различных датчиков, расположенных на тросе и буксируемом аппарате (Electrodynamic tether control, the US patent №6419191, 16/07/2002). При этом способе считывания и интерактивного вычисления данных используются датчики (сенсоры), которые, будучи расположенными на буксируемом аппарате и тросе, по каналам связи передают свое текущее положение в пространстве относительно буксировщика, а положение буксировщика и БО определяют относительно земли с помощью системы GPS. При этом существует возможность считывать и вычислять положение буксировщика, троса, БО с помощью БЦВМ и с наземных передвижных и стационарных радиолокационных комплексов.
К недостаткам подобных систем можно отнести высокую технологическую сложность эксперимента, существование погрешностей измерений, связанных со специфическими для данного метода расчетами (например, поправки на эффект Доплера и т.д.), погрешности спутниковой связи, высокую стоимость эксперимента и сложность универсальной математической модели движения тросовой системы для дальнейшего использования при исследованиях на стендах, а также при математическом моделировании.
Существуют сложные способы определения координат тросовой системы. Например, способ, используемый при исследовании систем дозаправки в воздухе (John С. Vassberg, David Т. Yeh, Andrew J. Blair, Jacob M.Evert (The Boeing Company-Phantom Works, Flight Technologies 5301 Bolsa Avenue, Huntington Beach, CA 92647) Dynamic characteristics of а КС-10 wing - pod refueling hose by numerical simulation, AIAA - 2002 - 2712 20 - the AIAA Applied Aerodynamics Conference 24-26 June 2002, St Louis, Missouri). Моделирование движения сложной тросовой системы по такому методу основывается на изучении образования синусоидальных волн переноса энергии и имеет сложный характер, при этом он требует большое количество машинного времени. Метод хорошо себя зарекомендовал в изучении процесса стабилизации движения тросовой системы, а использование его в изучении переходных процессов не отражает реальной физики процессов, происходящих с тросом (шлангом).
Для оценки динамики БО используются различные методы моделирования авиационной ТС. К наиболее известным методам моделирования относится моделирование на основе много стержневой аппроксимации троса, на ее алгоритмах основаны британский коммерческий программный продукт CBAS (Cable-Body-Aircraft-Simulator) (J.F.Henderson, B.Ireland Flight validation of computer program CBAS (cable body airborne simulator) // J Mechanical Engineering, Part G: Journal of Aerospace Engineering, Vol 210, 1996) и российский программный пакет ТАБИ (Трос-Аппарат-Буксировщик -Имитатор) (ФГУП «ЛИИ им. М.М.Громова») для использования в алгоритмах БЦВМ на борту ЛА-буксировщика. Оценка динамики ТС по методике моделирования многостержневой аппроксимации имеет погрешности в расчете до 30% - по амплитудам и до 25% - по частотам динамических параметров и, соответственно, координат и требует больших затрат машинного времени их расчета.
Кроме того, известен метод приближенного моделирования динамики системы трос-тело в аэродинамических трубах (В.И.Валяев. Приближенное моделирование динамики системы трос-тело в аэродинамической трубе, Ученые записки ЦАГИ, 1976, т.7, №3). В этом методе устанавливаются критерии построения модели для динамических испытаний в дозвуковой аэродинамической трубе, производится решение задачи движения системы трос-тело в потоке несжимаемой жидкости в продольной плоскости. Задача решена применительно к испытаниям в аэродинамической трубе при жестком закреплении троса в одной точке. Такое решение непригодно в случае пространственного движения буксировщика, к которому прикреплен трос.
Наиболее близким, принятым за прототип для предлагаемого способа определения динамических параметров и координат ТС, является способ определения координат и динамических параметров ТС, описанный в патенте на изобретение №2347719 «Способ управления тросовой системой (ЛА-буксировщик-трос-буксируемый летательный аппарат)», который может обеспечить режим вычисления, близкий к режиму реального времени. Вычисление динамических параметров ТС в этом способе производится по известным аналитическим выражениям с применением наперед определяемых начальных и граничных условий. При этом динамические параметры и координаты ТС определяются в течение эксперимента на коротких интервалах времени.
Использование этого способа весьма трудоемко при подстройке алгоритмов под конкретный характер движения ТС, поскольку не всегда возможно однозначно учесть аэродинамические возмущения воздушного потока (спутные струи, турбулентное течение и прочее) в граничных и начальных условиях. Кроме того, при использовании этого способа необходимо выбирать моменты и промежутки времени для вычисления динамических параметров и координат троса и БО так, чтобы расхождения по времени измеряемых и вычисляемых величин в процессе полета не были значительными. Таким образом, способ нельзя использовать непрерывно по времени в ходе летных испытаний.
Технический результат, на достижение которого направлено изобретение, заключается в повышении точности в определении динамических параметров и координат троса и БО, интенсификации летного эксперимента и уменьшении затрат на обеспечение проведения летного эксперимента с использованием ТС.
Для достижения названного технического результата в предлагаемом способе управления авиационной буксировочной ТС, состоящей из буксировщика, БО и соединяющего их троса, включающем определение координат и скоростей троса и БО относительно буксировщика, а также параметров движения и ориентации буксировщика, математическое моделирование движения ТС на бортовой цифровой вычислительной машине с помощью системы уравнений движения троса:

где  - вектор определяемых динамических параметров, включающий в себя модуль скорости, силу натяжения и углы наклона линии троса в выбранной системе координат,
- вектор определяемых динамических параметров, включающий в себя модуль скорости, силу натяжения и углы наклона линии троса в выбранной системе координат,
A и B - неособые матрицы, зависящие от указанного вектора ,
τ - безразмерное время,
ς - относительная координата удаления произвольной точки троса от точки крепления троса к буксировщику, отсчитываемая вдоль линии троса (0<ζ<1),
 - вектор внешней вынуждающей силы, действующей на ТС, причем прогнозируемые граничные условия получают путем измерения параметров движения и ориентации в воздушном потоке буксировщика, в качестве которого применяют ЛА, а также с помощью уравнений динамики БО, в которых учитывают длину, диаметр сечения, массу и коэффициент растяжения троса, аэродинамические и физические характеристики БО;
- вектор внешней вынуждающей силы, действующей на ТС, причем прогнозируемые граничные условия получают путем измерения параметров движения и ориентации в воздушном потоке буксировщика, в качестве которого применяют ЛА, а также с помощью уравнений динамики БО, в которых учитывают длину, диаметр сечения, массу и коэффициент растяжения троса, аэродинамические и физические характеристики БО;
определение в результате этого моделирования динамических параметров ТС и их использование для управления данной системой, согласно изобретению, производят определение координат и скорости троса и БО, динамических параметров БО непрерывно по времени. Вычисляют текущие и прогнозируют будущие граничные условия, связанные с БО.
При этом на основе принципа дискретного приращения энергии и динамических параметров ТС, а также знания о характере изменения скорости точек троса как по всей его длине, так и по времени, переходят от системы уравнения (1) к системе уравнений быстрых вычислений в форме:
 - вектор скорости точек троса, состоящего из части компонент rk вектора
- вектор скорости точек троса, состоящего из части компонент rk вектора  ,
,
 - вектор известных функциональных соотношений для скорости, который определяется исходя из характера маневра, совершаемого буксировщиком в момент времени τ.
- вектор известных функциональных соотношений для скорости, который определяется исходя из характера маневра, совершаемого буксировщиком в момент времени τ.
Систему (2) решают в процессе летного эксперимента на борту буксировщика с использованием полученных граничных условий, находя требуемые динамические параметры троса , а также координаты троса и БО и используют их для управления БО в режиме реального времени полета ТС.
Таким образом, использование заявленного способа позволит непрерывно в процессе летного эксперимента определять динамические параметры ТС в режиме реального времени и вносить управляющие воздействия на ее движение.
Заявленный способ поясняется на следующих фигурах:
фиг.1: Схема тросовой системы, состоящей из ЛА-буксировщика (10), троса (11), буксируемого объекта (12),
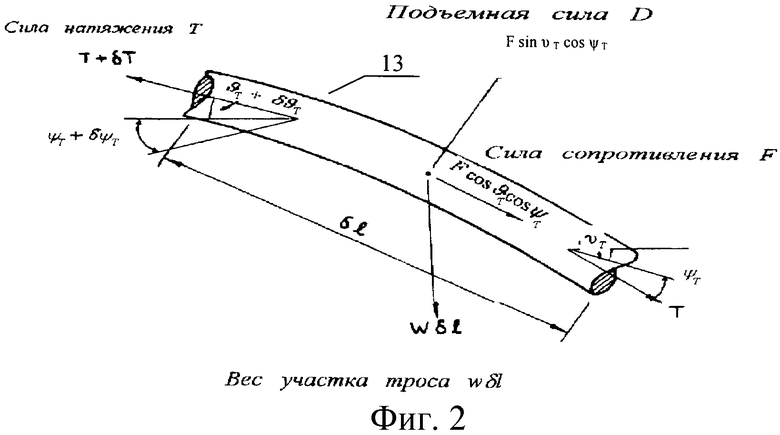
фиг.2: распределение сил на отдельном участке троса (13),
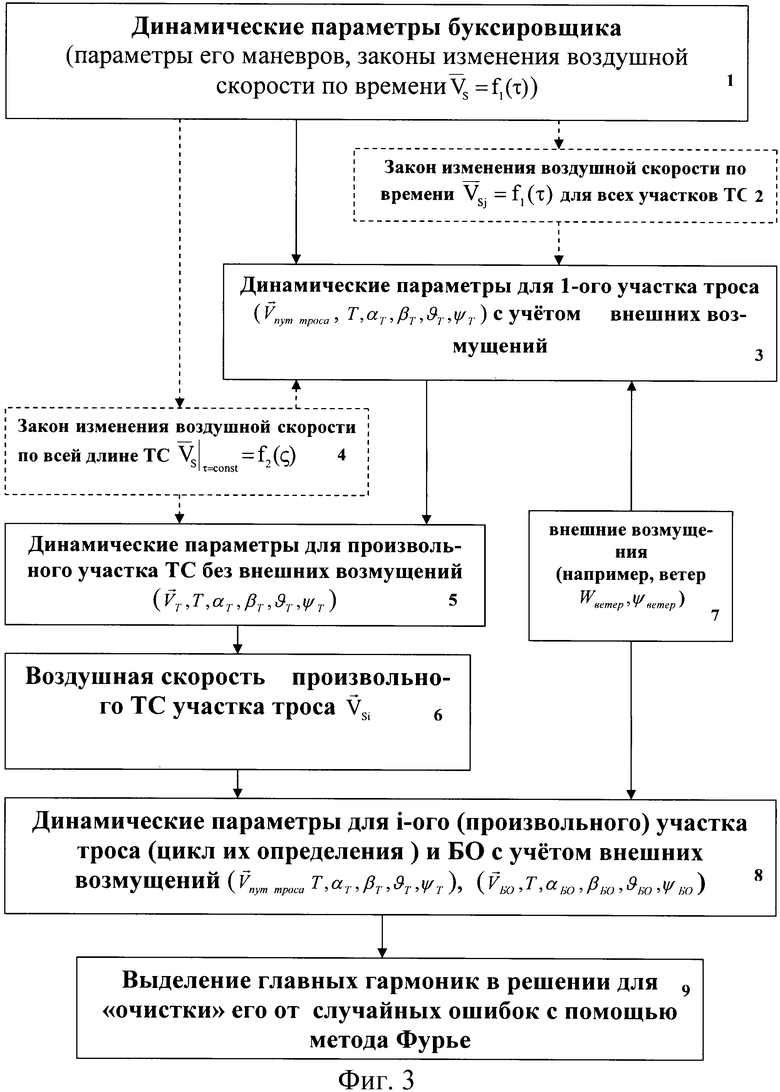
фиг.3: блок-схема определения динамических параметров и координат тросовой системы,
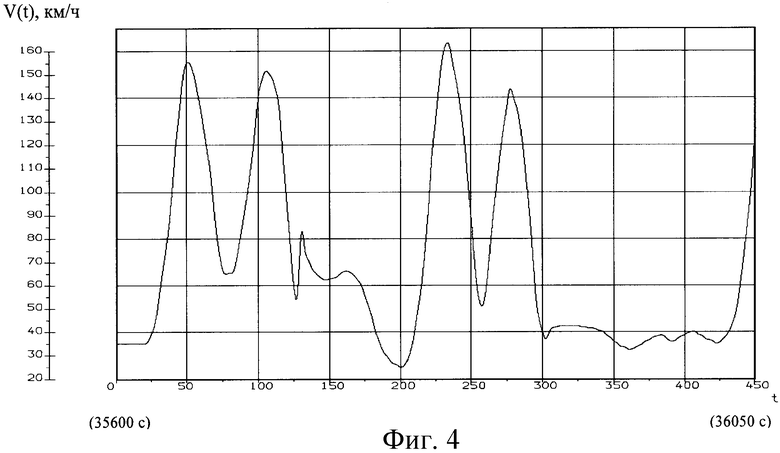
фиг.4: Изменение путевой скорости вертолета-буксировщика V(t) по времени в летном эксперименте (пример),
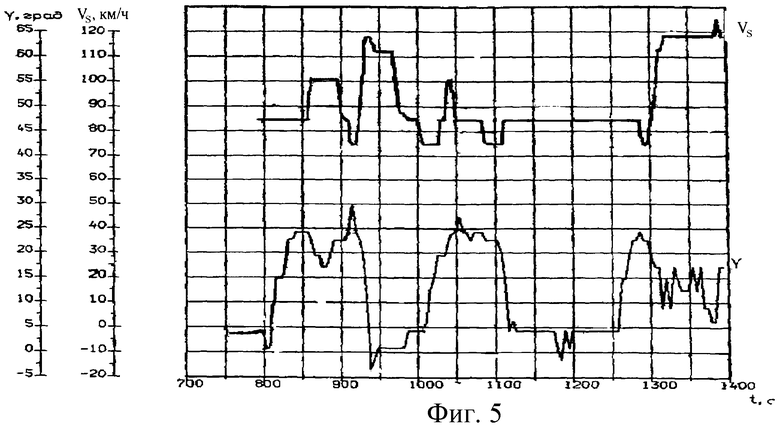
фиг.5: Данные, зарегистрированные в летном эксперименте с помощью системы аварийной регистрации полетных параметров (САРПП или «черный ящик») на борту вертолета-буксировщика. Воздушная скорость - VS; угол крена - γ (пример),
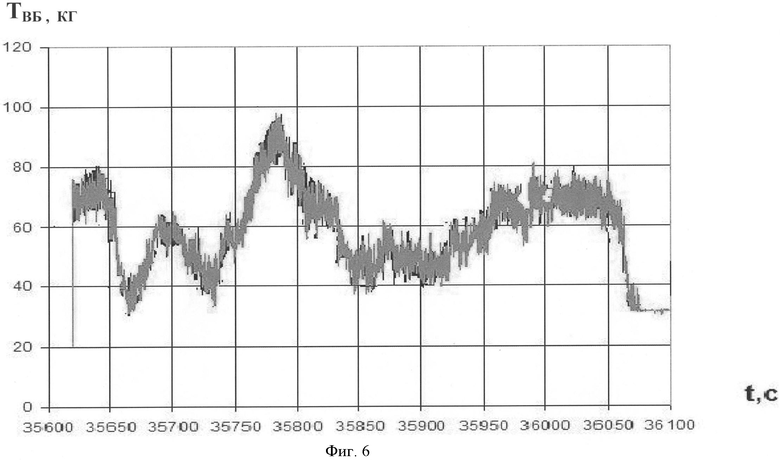
фиг.6: Сила натяжения (кг) троса на вертолете-буксировщике, измеренная в эксперименте (пример).
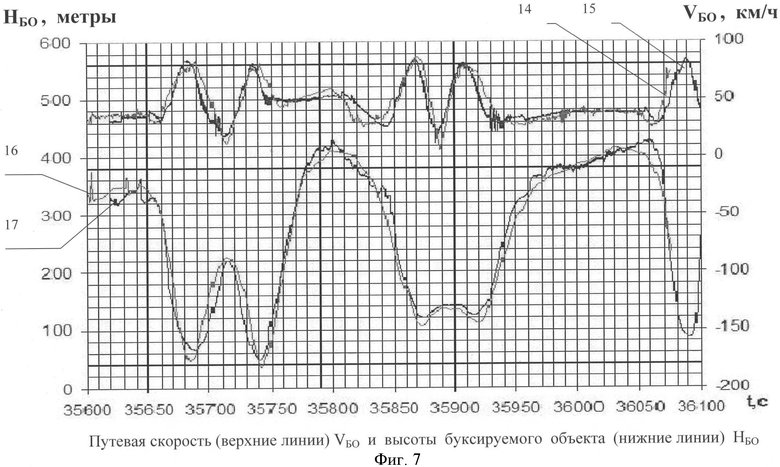
фиг.7 Сравнение путевой скорости (верхние линии) VБО и высоты буксируемого объекта (нижние линии) НБО, где (14), (16) - экспериментальные данные, (15), (17) - моделирование по новому методу (пример).
Способ осуществляется следующим образом.
В качестве входных параметров вводят данные измерений: скорости, высоты, угловых положений СБ, предварительно вводят физические параметры троса: его длину, диаметр, массу, коэффициент растяжения, а также его силу натяжения в месте выпуска его из лебедочного устройства, аэродинамические и физические характеристики БО. С учетом характеристик БО (12) составляют его динамические уравнения, то есть граничные условия для задачи определения динамических параметров и координат троса и БО.
Определение динамических параметров и координат TC (см. фиг.1) представляет собой решение системы уравнений динамики и кинематики гибкого и растяжимого троса, описывающее движение троса под действием аэродинамических сил D и F, сил натяжения T и тяжести Wδ1, которые воздействуют на элементарный участок троса (13) длины δ1 (см. фиг.2). В общем виде система представляет собой систему уравнений в частных производных гиперболического типа вида (1).
Предлагаемый способ решения технической задачи основывается на использовании физических зависимостей энергии ТС от ее параметров. Предложен принцип дискретного распределения энергии и изменения параметров системы. Исходя из него можно установить, что в переходных процессах происходит одномоментное изменение динамических параметров ТС (компонент ) с достижением ими локальных экстремумов по времени. Благодаря этому можно свести решение системы (1) к решению системы уравнений более простого вида при знании того, как изменяется воздушная скорость по длине троса и по времени, которая однозначно определяется из характера маневров буксировщика. При этом система уравнений (1) будет иметь эквивалентное решение решению системы (2):
где - вектор скорости точек троса, состоящего из части компонент , - вектор известных функциональных соотношений для воздушной скорости, который определяется исходя из характера маневра, совершаемого буксировщиком в момент времени τ.
Динамическое поведение всех сложных многофакторных систем и, в частности, рассматриваемой TC, описываемой дифферециальными уравнениями в частных производных (ДУ в ЧП) (1), можно представить как совокупность состояний системы по времени, определяемых изменением одного (в данном случае  ), или нескольких параметров. Условно назовем эти параметры «возмущающими». Остальные динамические параметры в переходных процессах зависят от поведения «возмущающих», и при их изменении они также изменятся с ними одновременно. Этот факт подтверждается при учете принципа дискретного распределения энергии и принципа минимума затрачиваемой энергии на работу. Такой подход может быть полезен с практической точки зрения. Действительно, зная поведение «возмущающего» параметра, в некоторых случаях можно восстановить остальные динамические параметры, не прибегая к полному интегрированию системы уравнений (1), например, не прибегая к интегрированию по времени.
), или нескольких параметров. Условно назовем эти параметры «возмущающими». Остальные динамические параметры в переходных процессах зависят от поведения «возмущающих», и при их изменении они также изменятся с ними одновременно. Этот факт подтверждается при учете принципа дискретного распределения энергии и принципа минимума затрачиваемой энергии на работу. Такой подход может быть полезен с практической точки зрения. Действительно, зная поведение «возмущающего» параметра, в некоторых случаях можно восстановить остальные динамические параметры, не прибегая к полному интегрированию системы уравнений (1), например, не прибегая к интегрированию по времени.
Таким образом, алгоритмы вычисления динамических параметров из системы ДУ в ЧП по заявленному способу будут более простыми и быстрыми. Они не будут требовать построения вычислительных сеток, поскольку шаг по времени автоматически будет определяться исходя из величин возмущающего параметра. К некоторым издержкам такого алгоритма можно отнести то, что он привносит дополнительные гармоники высокого порядка в рассчитанные параметры, на графиках это выглядит как паразитный дребезг. Эта особенность как раз и связана с отсутствием производной параметра по времени, которая выполняет роль сглаживания. Впрочем, эта особенность может быть легко устранена, если к полученной рассчитанной функции применить разложение в ряд Фурье и использовать лишь несколько первых гармоник.
Например, в задаче о движении ТС (1) возмущающим параметром для решения можно считать воздушную скорость точек троса  , поскольку ее поведение проще всего понять исходя из кинематики TC и связанной с ней геометрией расположения точек TC при их движении в пространстве. Характер кинематических законов изменения скорости точек TC можно восстановить путем исследования поведения входных параметров (определяемых режимом буксировщика), а также механики ТС как протяженного тела (см. фиг.5).
, поскольку ее поведение проще всего понять исходя из кинематики TC и связанной с ней геометрией расположения точек TC при их движении в пространстве. Характер кинематических законов изменения скорости точек TC можно восстановить путем исследования поведения входных параметров (определяемых режимом буксировщика), а также механики ТС как протяженного тела (см. фиг.5).
Заявленный способ, включающий непрерывное по времени определение координат и скоростей троса и буксируемого объекта относительно буксировщика, а также параметров движения и ориентации буксировщика, математическое моделирование движения тросовой системы с помощью бортовой цифровой вычислительной машины (БЦВМ), динамические параметры определяются в результате этого моделирования и их используют для управления данной системой. Непрерывно по времени полета получают граничные условия для системы уравнений движения троса и решают систему (2).
Опишем методологию проведения летных испытаний (ЛИ) с использованием предлагаемого способа. БЦВМ на буксировщике с программным обеспечением, основанном на предлагаемом алгоритме, непрерывно в ходе летного эксперимента осуществляют вычисление необходимых величин динамических параметров (прогнозные значения) ТС с учетом корректировки этих данных на изменяющиеся в ходе ЛИ внешние возмущения. В ходе всех ЛИ на БО измеряют те же динамические параметры. При этом в ходе проведения ЛИ, согласно смоделированным данным, можно настроить регулируемые в эксперименте параметры на БО. Данные моделирования (прогнозирования) и измерений вносят на ПЗУ БЦВМ. По необходимости с борта буксировщика они могут быть ретранслированы на сопровождающие данное ЛИ станции слежения.
В ходе послеполетной обработки производят обработку данных ЛИ, производят обработку измеренных данных стандартными методами и формируют данные для следующих ЛИ. В результате послеполетной обработки производят сравнение прогнозируемой (смоделированной) и измеренной информации. В этом сравнении устанавливают характерные особенности влияния тех или иных факторов на свойства буксируемого авиационного объекта, а также уточняют внутренние особенности его поведения. Например, такое определение может быть важно для корректировки параметров системы управления буксируемым авиационным объектом и быть полезным в выборе ее наиболее удачной схемы.
Заявленный способ требует минимального количества машинного времени расчета параметров и координат ТС и БО, что выводит расчеты параметров в режим реального времени. При этом с помощью этого способа их определяют непрерывно в ходе летного эксперимента по всей длине тросовой системы с высокой точностью при любых режимах буксирования. Вследствие этого способ можно использовать на борту ЛА-буксировщика, исключив при этом сложные процедуры вычисления параметров и их измерения с помощью средств слежения, расположенных по всей длине ТС. К входным параметрам для решения уравнений вычислений относятся физические параметры троса и его сила натяжения троса в месте выпуска его из лебедочного устройства буксировщика и аэродинамические данные БО, а также параметры буксировщика. Благодаря предложенному способу будут сэкономлены значительные материальные средства на летный эксперимент, прежде всего, за счет непрерывного режима вычислений параметров вместо режима их вычислений на коротких интервалах времени, предложенного в прототипе.
В заявленном способе приведена схема определения динамических параметров и координат тросовой системы на фиг.3, где изображены:
1 - блок ввода данных динамических параметров буксировщика, его параметров его маневров (закон изменения его воздушной скорости) и прочее
2 - блок задания закона изменения воздушной скорости по времени для точек ТС с учетом маневра буксировщика
3 - блок определения динамических параметров 1-го участка троса с учетом внешних возмущений
4 - блок задания закона изменения воздушной скорости по всей длине ТС с учетом маневра буксировщика
5 - блок определения динамических параметров ТС без учета внешних возмущений
6 - блок вычисления воздушной скорости участков ТС
7 - блок задания внешних возмущений
8 - блок определения динамических параметров произвольного участка троса и БО с учетом внешних возмущений
9 - блок выделения главных гармоник в решении для «очистки» его от случайных помех с помощью метода Фурье.
Пример
Приведем моделирование реального летного эксперимента (ЛЭ) по определению путевых параметров БО (в виде цилиндра), а именно его скорости и высоты. Система уравнений движения троса, возмущенного ветром, которое выше представлялась в общем виде матричным уравнением (1), выглядит в виде системы безразмерных уравнений:
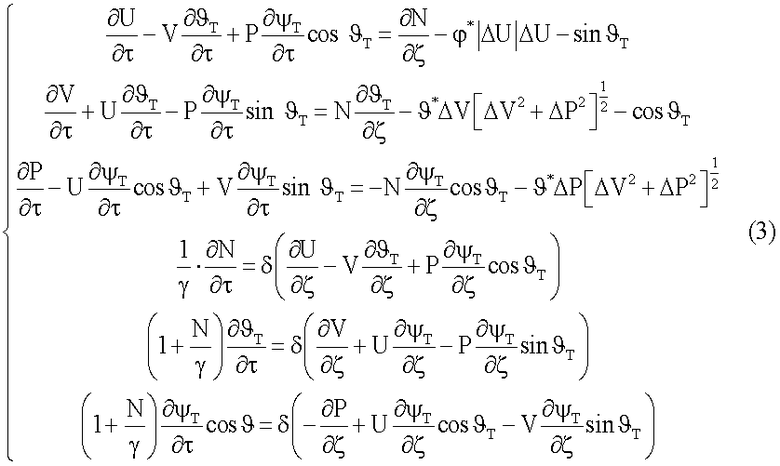
Неизвестными параметрами являются компоненты вектора скорости U, V, P, приведенные к текущей скорости буксировки, модуль силы натяжения N, углы тангажа υТ и курса ψТ для элементарных участков троса
γ - безразмерный модуль эластичности, равный 
где E - модуль Юнга, A* - площадь сечения троса, PTP - вес троса;
δ - безразмерный коэффициент, равный  , где Wбукс - скорость буксировщика, g - ускорение свободного падения (9,8 м/с2);
, где Wбукс - скорость буксировщика, g - ускорение свободного падения (9,8 м/с2);
φ*, ϑ* - отношения силы трения к весу троса, лобового сопротивления к весу троса 
где Ct и Cn - коэффициенты поверхностного трения и лобового сопротивления троса, q - величина скоростного напора  d - диаметр сечения троса, l - длина троса;
d - диаметр сечения троса, l - длина троса;
ΔU=U-u; ΔV=V-ν; ΔP=P-p - безразмерные составляющие скорости набегающего потока на участок троса;
U, V, P - безразмерные касательная, нормальная, бинормальная к тросу компоненты скорости в местной связанной системе координат, нормированные в соответствии со скоростью буксировки Wбукс;
u, v, р - безразмерные касательная, нормальная, бинормальная составляющие ветра в местной связанной системе координат, нормированные в соответствии со скоростью буксировки Wбукс;
W - модуль вектора скорости ветра;
l - рабочая длина нерастяжимого троса;
dl - длина элементарного участка разбиения троса;
mi - масса элементарного участка разбиения троса;
ViS - модуль воздушной скорости i-го участка троса;
αi и βi; - углы атаки и скольжения для элементарного участка троса;
υi и ψi - углы тангажа и курса для элементарного участка троса;
m, Gпог - масса, вес единицы длины троса, Gпог=m·g;
PTP - вес троса;
ζ - безразмерная длина;
t, τ - время, безразмерное время, 
φ*, υ* - отношения силы сопротивления и подъемной силы к весу троса 
γ* - безразмерный модуль эластичности,  ;
;
δ - безразмерный коэффициент,  ;
;
LБО - длина БО;
bA - аэродинамическая хорда БО;
Θ, θTp - траекторные углы БО и участка троса, прикрепленного к нему;
αTp и βTp - углы атаки и скольжения для участка троса, прикрепленного к БО;
RTpi, RTp, RБО, Ri - радиусы траектории участков троса, участка троса прикрепленного к БО, БО с ветром и без ветра соответственно;
υTp и ψTp - углы тангажа и курса для участка троса, прикрепленного к БО;
σтp - угловое запаздывание участка троса, прикрепленного к БО от ВБ;
σБО - угловое запаздывание БО от ВБ;
WFL и wabs - потоковая и абсолютная скорости центра масс БО;
Fаэрод - аэродинамическая сила, действующая на БО;
CXa, CYa и CZa - коэффициенты лобового сопротивления, подъемной и боковой сил БО в скоростной системе координат;
mX, mY и mZ - коэффициенты моментов аэродинамических сил БО в связанной системе координат;
υT и ψT - углы тангажа и курса для точек троса;
α, β, γ, υ и ψ - углы атаки, скольжения, крена, тангажа и курса БО;
xd, yd и xp, yp - координаты точек крепления троса и парашюта к БО в связанной системе координат;
(ωx, ωy, ωz) - вектор угловой скорости БО относительно его центра масс;
Ω - угловая скорость ВБ в вираже;
s - координата удаления произвольной точки троса от точки крепления троса к буксировщику;
ζ=s/l - относительная координата удаления произвольной точки троса от точки крепления троса к буксировщику (0<ζ<1);
τ - безразмерное время (τ=t×g/wбукс).
По заявленному способу определяют динамические параметры, которые представлен в блок-схеме на фиг.3.
Блок ввода данных динамических параметров буксировщика
Опишем проведение ЛЭ, результаты которого моделировались по заявленному способу. В ЛЭ воссоздавалось движение ТС в маневре «воронка». В качестве буксировщика использовался вертолет Ми-8. ЛЭ сопровождался сильными порывами северного ветра (скорость порядка 14 м/с, направление - -5° по выбранной относительно точки привязки системы координат). На ВБ и на БО были установлены приборы спутникового навигационного слежения (СНС) GPS (Global Positioning System), позволяющие определять координаты траектории относительно земли, результаты их использования для определения путевой скорости ВБ и БО показаны на фиг.4 и 7. Кроме этого, на ВБ с помощью САРПП записывались его воздушная скорость и крен (см. фиг.4, 5) и была установлена специальная аппаратура для измерений силы натяжения в точке выпуска троса из лебедки, результаты которых представлены на фиг.6. К БО был прикреплен парашют для выдерживания необходимых режимов его движения.
Маневр «воронка» представляет собой движение, в котором буксировщик производит вираж. При этом каждый элемент троса, а также БО совершают круговое движение. Радиус кругового движения элементов ТС уменьшается от наибольшего у вертолета-буксировщика (ВБ) до наименьшего у БО. Для моделирования был выделен определенный интервал времени, на котором ТС выполнялась «воронка». Кроме маневра, для создания «воронки» на этом интервале ВБ осуществлял прочие маневры, такие как движение по прямой, движение в вираже с изменением угла крена. Движение ВБ на выбранном отрезке времени описывается определенными законами изменения воздушной скорости по времени  которые частично были восстановлены из данных САРПп (фиг.4, 5).
которые частично были восстановлены из данных САРПп (фиг.4, 5).
В качестве входных данных для моделирования данных ЛЭ использовались измерения, представленные на фиг.4-6, а также все прочие, восстановленные из измерений координат с помощью прибора СНС GPS, установленного на ВБ.
Блок законов изменения воздушной скорости по времени для всех участков ТС
Выбранный временной интервал для определения поведения законов изменения воздушной скорости по времени f1(τ) (фиг.4) разбивается на указанные участки следующим образом:
1-й участок 0.0 с<t<24.3 с - прямолинейный горизонтальный полет (ПГП)
2-й участок 24.3 с≤t<46.7 с - вход в 1-й вираж из ПГП
3-й участок 46.7 с≤t<121.4 с - 1-й вираж (для «воронки»)
4-й участок 121.4 с≤t<130.7 с - первая перекладка по крену
5-й участок 130.7 с≤t<180 с - вторая перекладка по крену
6-й участок 180.0 с≤t<225.0 с - вход во 2-й вираж
7-й участок 225.0 с≤t<291.8 с - 2-й вираж (для «воронки»)
8-й участок 291.8 с≤t<355.2 с - выход из 2-го виража в ПГП
9-й участок 355.2 с≤t<421.7 с - ПГП
10-й участок 421.7 с≤t<455.0 с - вход в 3-й вираж
11-й участок 455.0 с≤t - вираж.
Рассмотрим подробнее участки прямолинейного горизонтального полета и переходных процессов, участки виража рассмотрим в отдельном разделе. Участки ПГП легко определяются исходя из величины скорости ВБ. Там, где она примерно постоянна (без учета флуктуации) - этот участок ПГП. Из полетной записи просматриваются два участка ПГП, в которых ВБ и вся ТС летели против ветра (см. фиг.4, 5):
Участки входа в вираж из ПГП или близкого к нему режима:
2-й 24.3 с<t<46.7 с
10-й 421.7 c<t<455 с.
Переходные процессы по скорости на участках входа в вираж (2-м, 10-м) в первом приближении можно смоделировать линейными законами ее изменения от величины воздушной скорости при ПГП до величины в вираже. При выходе из виража (8-й участок) аналогичным образом предполагается изменение скорости от ее значения на вираже до значения в ПГП.
Таким образом, предполагаем, что здесь воздушная скорость ViS точки троса ζi при входе в вираж меняется по закону:
ViS≈VВБ+(ViB-VВБ)/(tK-tH)·(t-tH).
Скорость на участке выхода из виража в ПГП представлена законом:
ViS≈ViB+(ViB-VВБ)/(tK-tH)·(t-tH), причем
ViB=Ω·Ri
Ω - установившаяся угловая скорость вертолета-буксировщика в вираже;
VВБ - установившаяся скорость вертолета-буксировщика в вираже;
Ri - мгновенный радиус вращения точки;
ViB - воздушная скорость;
a tK и tH - начало и конец временного интервала.
Наиболее сложными случаями являются переходные процессы в интервале 121.4 с<t<225 с (4-й - 6-й участки). Здесь не происходит выход из 1-го виража в ПГП. Об этом свидетельствует график путевой скорости ВБ. Резкие изменения скорости и ее направления на 4-ом участке 121.4 с<t<130.7 с говорят о том, что ВБ выходит на отрицательный угол крена и это можно смоделировать следующим линейным законом: ViS≈ViB-(|Viγ1|+ViB)/(tK-tH)·(t-tH),
где Viγ1=2 м/с - воздушная скорость в вираже с отрицательным углом крена на 4-ом участке.
На 5-ом участке 130.7 с<t<180 с происходит выход на вираж с другим отрицательным углом крена, закон изменения скорости примем в виде: ViS≈-|Viγ1|-(-|Viγ1|+|Vi2γ|)/(tK-tH)·(t-tH),
где Viγ2=4.5 м/с - максимальная воздушная скорость на 5-ом участке.
Наконец, на 6-ом участке 180 с<t<225 с происходит выход из виража с отрицательным углом крена на вираж с положительным углом крена по закону:
ViS≈-|Viγ2|+(|Viγ2|+ViB)/(tK-tH)·(t-tH).
На участках 9-11 t>355.2 с происходит выход на ПГП и новый переходный процесс входа в вираж.
Блок определения динамических параметров для 1-ого участка троса с учетом внешних возмущений
Определение динамических параметров участка троса, примыкающего к ВБ, осуществляется исходя из параметров ВБ. Вот почему условно примем, что угловое положение этого участка троса, скорость близки с соответствующими параметрами ВБ. Представим уравнения, описывающие параметры для первого от ВБ участка троса.
Радиус и угловая скорость ВБ, которая одинакова для всей ТС при отсутствии ветра:
Проекции скорости ВБ относительно земли и ее модуль:

Проекции скорости для первого участка троса в связанной с ним системе координат:
V1XC=V1Xg·cosψ1·cosϑ1+V1Yg·sinϑ1-V1Zg·sinψ1·cosϑ1
V1YC=-V1Xg·cosψ1·sinϑ1+V1Yg·cosϑ1+V1Zg·cosψ1
V1ZC=-V1Xg·sinψ1+V1Zg·cosψ1
Проекции скорости ветра в связанной с первым участком троса системе координат:
u1=W·cosψ1·cosϑ1
ν1=-W·cosψ1·sinϑ1
p1=W·sinψ1
Проекции поточной скорости для первого участка троса в связанной с ним системе координат и ее модуль:
V1FLx=V1XC-u1
V1FLy=V1YC-ν1
V1FLz=V1ZC-p1

Углы атаки и скольжения для первого участка троса:
Блок определения динамических параметров для произвольного участка ТС без внешних возмущений
Покажем на примере движения в режиме «воронка» определение динамических параметров ТС (для всех прочих временных участков оно аналогично и более просто). Прежде чем приступить к вычислению динамических параметров исходя из данных, которые считаются известными, необходимо определить скорость точек троса без учета ветра, то есть воздушную скорость ViB=Ω·Ri. Таким образом, необходимо вычислить радиус Ri. В маневре ВБ вираж ТС выполняет «воронку». Маневр без ветра представляет собой установившееся движение, в котором все точки ТС движутся по правильным круговым траекториям, радиусы которых можно вычислить исходя из системы уравнений (3), если воспользоваться формулой (2). Вот уравнения после возврата к размерным величинам и упрощения полученной системы уравнений (3), из которых вычисляются динамические параметры для того, чтобы использовать их при вычислении радиусов круговых траекторий точек ТС:
В установившемся движении углы атаки и тангажа совпадают. Кроме того, угловое запаздывание точек троса постоянно по времени и поточная скорость при отсутствии ветра по модулю равна скорости точек.
Вычисление воздушной скорости и связанного с ним недифференциальной связью параметром (угол курса ψi) можно восстановить из геометрических свойств кинематики движения ТС. Для этого последние четыре уравнения можно и не использовать. Вместо них используем другой способ определения воздушной скорости (ViX, ViY, ViZ) с учетом первых двух уравнений полученной системы. Алгоритм ее вычисления и является законом ее изменения по длине троса f2(ς).
Запаздывание и угол курса определяются так же, как и для произвольного случая:
xri=dl·cosϑi

ψi=ψ1+σi
Исходя из этого можно записать:
ViS=Ω·Ri
Следующие соотношения определяют ее проекции относительно земли:
ViXg=ViScosψi
ViYg=0
ViZg=ViSsinψi
Поскольку при установившемся движении без ветра угол курса относительно земных осей не влияет на динамические параметры, то можно принять, что ψi=σi. Это означает:
ViXg=ViScosσi
ViYg=0
ViZg=ViSsinσi
Боковая проекция скорости для произвольного участка троса в связанной с ним системе координат и угол скольжения:
ViZC=ViXg·sinσi+ViZg·cosσi
Для временных интервалов, на которых есть либо установившийся вираж без ветра, либо переходные процессы входа/выхода в/из него, можно использовать этот алгоритм.
Блок определения динамических параметров произвольного участка троса и БО с учетом внешних возмущений
Два уравнения, полученные с помощью (2), определяют переменные T, ϑi, при этом прочие переменные определяются из соотношений, аналогичных тем, что были показаны для случая 1-ого участка троса (в них необходимо заменить прификсы при переменных с 1 на i):


Угловое запаздывание i-го участка троса по углу курса в условиях ветра вычисляется по-своему:
xi=dlcosϑi

σi=σi-1-δσ
При буксировании объекта в виде цилиндра граничные условия представляются формулами, представленными ниже уравнениями.
Угловое запаздывание БО по углу курса в условиях ветра вычисляется так:

Здесь используется прификс TP для обозначения параметров участка троса, которому прикреплен БО.
Проекции приращения скорости БО относительно прикрепленного к нему участка троса в земной системе координат:
δVX=0.5·LБО·(-ωZ+Ω·cosϑ·sinγ)·(-cosψ·sinϑ·cosγ+sinψ·cosγ)+0.5·LБО·(ωY-Ω·cosϑ·sinγ)·(cosψ·sinϑ·cosγ+sinψ·cosγ);
δVY=0.5·LБО·(-ωZ+Ω·cosϑ·sinγ)·cosϑ·cosγ+0.5·LБО·(ωY-Ω·cosϑ·sinγ)·cosϑ·sinγ;
δVZ=0.5·LБО·(-ωZ+Ω·cosϑ·sinγ)·(-cosψ·sinγ+sinψ·sinϑ·cosγ)+0.5·LБО·(ωY-Ω·cosϑ·sinγ)·(cosψ·cosγ-sinψ·sinϑ·sinγ).
Проекции скорости прикрепленного к БО участка троса на его связанные оси:
VrX=VTP·cosαTP·cosβTP, VrY=-VTP·sinαTP·cosβTP, VrZ=VTP·sinβTP.
Проекции скорости прикрепленного к БО участка троса на земные оси:
VTX=VrX·cosψTP·cosϑTP+VrY·sinϑTP-VrZ·sinψTP·cosϑTP;
VTY=-VrX·cosψTP·sinϑTP+VrY·cosϑTP+VrZ·sinψTP·sinϑTP;
VTZ=VrX·sinψTP+VrZ·cosψTP.
Проекции скорости БО в земной системе координат и ее модуль:
VYg=VTPY+δVY, VXg=VTPX+δVX, VZg=VTPZ+δVZ;

Пересчет скорости БО из земной системе координат в связанную с БО производится по формулам:
VXC=VXg·cosψ·cosϑ+VYg·sinϑ-VZg·sinψ·cosϑ;
VYC=VXg·(-cosψ·sinϑ·cosγ+sinψ·sinγ)+VYg·cosϑ·cosγ+VZg·(cosψ·cosγ+sinψ·sinϑ·cosγ);
VZC=VXg·(cosψ·sinϑ·sinγ+sinψ·cosγ)-VYg·cosϑ·sinγ+VZg·(cosψ·sinγ-sinψ·sinϑ·sinγ).
Проекции скорости ветра в связанной с БО системе координат:
uБО=W·cosψ·cosϑ, νБО=-W·cosψ·sinϑ, pБО=W·sinψ.
Проекции поточной скорости БО в связанной с ним системе координат и ее модуль:
VFLx=VХС-uБО, VFLy=VYС-νБО, VFLz=VZС-pБО;

Скоростной напор: 
Углы атаки и скольжения для БО:
 β=arcsin(VFLz/VFL).
β=arcsin(VFLz/VFL).
Проекции силы натяжения в земной системе координат:
TX=T·cosψmp·cosϑmp;
TY=T·sinϑmp;
TZ=-T·sinψmp·cosϑmp.
Проекции силы натяжения в связанной с БО системе координат:
RX=TX·cosϑ·cosψ+TY·sinϑ-TZ·sinψ·cosϑ;
RY=TX·(sinψ·sinγ-sinϑ·cosψ·cosγ)+TY·cosϑ·cosγ+TZ·(cosψ·sinγ+sinψ·sinϑ·cosγ);
RZ=TX·(sinψ·cosγ+cosψ·sinϑ·sinγ)-TY·cosϑ·sinγ+TZ·(cosψ·cosγ-sinψ·sinϑ·sinγ).
Моменты силы натяжения относительно осей в связанной с БО системе координат:
MXt=RZ·yT, MYt=-RZ·xT, MZt=RY·xT-RX·yT.
Проекции вектора момента от действующих на БО в виде цилиндра аэродинамических сил на оси связанной с БО системой координат, а также их безразмерные коэффициенты равны:
MX=mX·q·S·LБО, mX=-0.01·β-0.1·ωX;
MY=mY·q·S·LБО, mY=-0.05·β-0.5·ωY;
MZ=mZ·q·S·bA, mZ=-0.05·α-0.5·ωZ.
Сила сопротивления парашюта и моменты аэродинамических сил, действующих на БО со стороны парашюта, относительно осей связанной с БО системе координат:
Qp=CXp·q·S;
MXt=-Qp·yp·sinβ;
MYt=-Qp·xp·sinβ;
MZt=Qp·cosβ·(yp·cosα-xp·sinα).
Динамические уравнения для угловых скоростей имеют вид:



Кинематические уравнения для вычисления углов крена и тангажа:


Высота БО определяется в результате интегрирования уравнения:
Результат применения описанного метода показан на фиг.7. Расхождение результатов моделирования и экспериментальных данных составило менее 10%. Время вычисления динамических параметров и координат и временном интервале 450 с времени было 150 с. Таким образом, удалось достигнуть необходимой точности вычислений искомых величин с приемлемой точностью в пределах режима реального времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПО КРУГУ АВИАЦИОННОЙ БУКСИРОВОЧНОЙ ТРОСОВОЙ СИСТЕМЫ | 2011 |
|
RU2466062C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРОСОВОЙ СИСТЕМОЙ (САМОЛЕТ-БУКСИРОВЩИК - ТРОС - БУКСИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ) | 2007 |
|
RU2347719C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГИ ДВИГАТЕЛЕЙ САМОЛЕТА | 2015 |
|
RU2579796C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2006 |
|
RU2301456C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕРЕХЛЕСТА БУКСИРУЕМОЙ ДВУХТРОСОВОЙ САМОЛЕТНОЙ АНТЕННЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2658549C1 |
| СИСТЕМА И ПРОЦЕСС ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ АЭРОДИНАМИЧЕСКИХ ПОВЕРХНОСТЕЙ СИЛОВОГО КРЫЛА | 2006 |
|
RU2405716C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| СПОСОБ РЕКОНСТРУИРОВАНИЯ НАГРУЗОК ОТ ПОРЫВОВ ВЕТРА И/ИЛИ НАГРУЗОК НА КОНСТРУКЦИЮ ЛЕТАТЕЛЬНОГО АППАРАТА, В ЧАСТНОСТИ ПАССАЖИРСКОГО САМОЛЕТА | 2006 |
|
RU2413658C2 |
| ТРЕНАЖЕР ВОЗДУШНОГО БОЯ | 2005 |
|
RU2297674C2 |
| Способ обеспечения вихревой безопасности летательного аппарата | 2021 |
|
RU2774083C1 |
Изобретение относится к летным исследованиям летательных аппаратов (ЛА), в которых используются тросовые системы (ТС) ЛА-буксировщик-трос-буксируемый объект для определения аэродинамических характеристик буксируемого объекта и идентификации его системы управления, для отработки системы дозаправки в воздухе, транспортировки грузов и сброс их с помощью тросовых систем, отработки систем противовоздушной обороны и средств борьбы с ними. Способ включает непрерывное по времени определение координат и скоростей троса, а также параметров движения и ориентации буксировщика, с помощью математического моделирования движения ТС на бортовой цифровой вычислительной машине с помощью системы уравнений движения троса. При моделировании исходная система уравнений движения троса сводится к некоторой системе уравнений быстрых вычислений, на основе принципа дискретного приращения энергии и динамических параметров ТС, а также знания о характере изменения скорости точек троса как по всей длине, так и по времени. Систему уравнений быстрых вычислений решают в процессе летного эксперимента на борту буксировщика с использованием полученных граничных условий. Достигается повышение точности в определении динамических параметров и координат троса и буксируемого объекта, интенсификация летного эксперимента и уменьшение затрат на обеспечение проведения летного эксперимента с использованием ТС. 7 ил.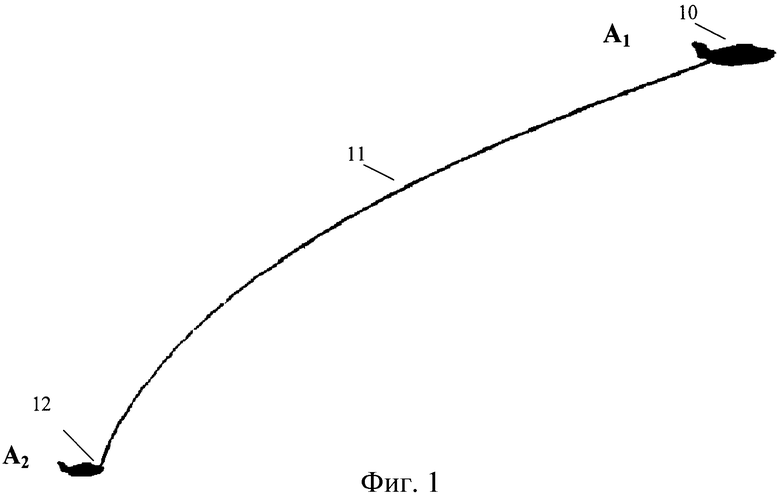
Способ управления авиационной буксировочной тросовой системой (ТС), состоящей из буксировщика, буксируемого объекта (БО) и соединяющего их троса, включающий определение координат и скоростей троса и БО относительно буксировщика, а также параметров движения и ориентации буксировщика, математическое моделирование движения ТС на бортовой цифровой вычислительной машине с помощью системы уравнений движения троса:
где - вектор определяемых динамических параметров, включающий в себя модуль скорости, силу натяжения и углы наклона линии троса в выбранной системе координат,
А и В - неособые матрицы, зависящие от указанного вектора ,
τ - безразмерное время,
ς - относительная координата удаления произвольной точки троса от точки крепления троса к буксировщику, отсчитываемая вдоль линии троса (0<ς<1),
- вектор внешней вынуждающей силы, действующей на ТС, причем прогнозируемые граничные условия получают путем измерения параметров движения и ориентации в воздушном потоке буксировщика, в качестве которого применяют летательный аппарат, а также с помощью уравнений динамики БО,
в которых учитывают длину, диаметр сечения, массу и коэффициент растяжения троса, аэродинамические и физические характеристики БО, определение в результате этого моделирования динамических параметров ТС и их использование для управления данной системой, отличающийся тем, что производят определение координат и скорости троса и БО, динамических параметров БО непрерывно по времени, вычисляют текущие и прогнозируют будущие граничные условия, связанные с БО, при этом на основе принципа дискретного приращения энергии и динамических параметров ТС, а также знания о характере изменения скорости точек троса, как по всей его длине, так и по времени, переходят от системы уравнения (1) к системе уравнений быстрых вычислений в форме:
где - вектор скорости точек троса, состоящего из части компонент rk вектора ,
- вектор известных функциональных соотношений для скорости, который определяется, исходя из характера маневра, совершаемого буксировщиком в момент времени τ,
которую решают в процессе летного эксперимента на борту буксировщика с использованием полученных граничных условий, находя требуемые динамические параметры троса , а также координаты троса и БО и используют их для управления БО в режиме реального времени полета ТС.
| СПОСОБ УПРАВЛЕНИЯ ТРОСОВОЙ СИСТЕМОЙ (САМОЛЕТ-БУКСИРОВЩИК - ТРОС - БУКСИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ) | 2007 |
|
RU2347719C1 |
| ЭПШТЕЙН Л.А | |||
| О моделировании динамики системы трос-тело, движущейся в воздухе | |||
| Уч | |||
| записки ЦАГИ, т.Х, №1, 1979, с.64-67 | |||
| МОСОЛОВ В.Е., ЕЛИСЕЕВ A.M | |||
| Использование интеллектуальных систем в задачах управления движением тросовых систем | |||
| Н.-т.конф | |||
| проф.-преп., научного и инженерно-технического состава МТУСИ | |||
| Тезисы | |||

