Настоящее изобретение относится к управляющей и регулирующей системе для предохранения транспортирующего устройства, в частности крановой установки. Оно предусмотрено для случая перегрузки, если при транспортировке транспортируемого груза, т.е. в случае перемещаемого транспортируемого груза, возникает нагрузка, превышающая нормальную рабочую нагрузку, перегрузка. Такие перегрузки могут возникать, в частности, в крановых установках, а также в подъемниках или других подъемно-транспортных устройствах, если, например, транспортируемый груз при подъеме/транспортировке зацепится или произойдет его застревание. В частности, в крановых установках существует опасность того, что при движении грузов вверх они зацепятся за входящие в область пути перемещения предметы или выступы. В таком случае могут возникнуть нагрузки, которые могут сильно повредить транспортирующее устройство или, в случае свободно стоящих кранов, могут привести даже к его опрокидыванию.
В случае известного предохранения от перегрузок, который приведен, например, в DE 20219282 U1, зависящая от нагрузки муфта сцепления в случае перегрузки отсоединяет подъемную лебедку от ее привода. При этом также действующий тормоз подъемной лебедки позволяет осуществить опускание поднимаемого груза, управляемое нагрузкой.
Особая проблема существует в случае крановых установок для подъема контейнеров, так называемых контейнерных мостовых перегружателей, которые при перегрузке контейнеров транспортируют их из узких трюмов контейнерных судов. При этом контейнеры могут перекоситься в этих трюмах, и может произойти их застревание. Возникающая при этом перегрузка при продолжении процесса транспортировки (подъема) может привести к значительной перегрузке мостового крана и в худшем случае даже обрыву или его опрокидыванию. Для этого случая предусмотрены так называемые системы защиты при застревании груза (системы Snag-Load), распознающие перегрузку, и посредством гидравлически регулируемых освобождающих салазок ослабляют подъемные тросы так, чтобы подвешенные контейнеры могли выйти из заклиненного положения и затем, после освобождения, снова транспортироваться надлежащим образом. Такие управляемые посредством гидравлики освобождающие устройства очень дороги и нуждаются в усиленном уходе и требуют комплексной направляющей для несущих тросов. В частности, в том случае, если, как это является обычным в случае контейнерных мостовых перегружателей, для каждого контейнерного спредера предусмотрены две установки с подъемными тросами, которые синхронизированы в работе. В случае таких установок для каждой установки с подъемными тросами требуется такая система Snag-Load. Таким образом, в основе настоящего изобретения лежит задача упростить такие системы Snag-Load.
Согласно изобретению эта задача решается посредством управляющей и регулирующей системы согласно пункту 1 формулы изобретения. При этом предусмотрено тормозное устройство, которое оказывает воздействие на транспортирующее устройство, а также управляющее устройство для тормозного устройства.
Понятие «управляющее устройство (управление)» должно в дальнейшем обозначать как классическую (открытую) систему управления, при которой одна или несколько входящих величин оказывает воздействие на одну или несколько выходящих величин системы, так и (закрытую) систему регулирования, при которой регулирование протекает в регулирующем контуре, и регулируемая величина в качестве зависящей величины непрерывно сравнивается с заданной величиной и автоматически находится под влиянием для приведения в соответствие с указанной задающей величиной. Понятие «управляющее устройство (управление)» должно далее также обозначать систему, которая выполняет как функции управления, так и функции регулирования.
Управляющая и регулирующая система согласно изобретению содержит дополнительно датчик перегрузки, который регистрирует перегрузку и выдает соответствующий сигнал о перегрузке, который приводит в действие управляющее устройство. Дополнительно предусмотрен датчик скорости, который регистрирует скорость транспортировки (подъема) и выдает соответствующий сигнал о скорости. При этом управляющее устройство в ответ на сигнал перегрузки воздействует сначала на тормозное устройство таким образом, что оно блокирует транспортирующее устройство и предохраняет транспортируемый груз. Процесс транспортировки прерывается. При поступлении последующего сигнала об освобождении (снятии нагрузки) управляющее устройство затем освобождает транспортирующее устройство - путем соответствующего управления тормозным устройством - таким образом, чтобы оно под действием нагрузки транспортируемого груза перешло в освобожденное состояние. В случае крановой установки для освобождения транспортируемый груз при этом опускается. Действие тормозного устройства на транспортировочное устройство при этом управляется и регулируется таким образом, что транспортируемый груз перемещается в освобожденное положение с достаточно постоянной скоростью. Эту постоянную скорость транспортировки обеспечивают, регулируя ее в соответствии с сигналом от датчика скорости.
Управляющая и регулирующая система согласно изобретению позволяет надежно распознавать и устранять возникшие перегрузки. При этом оно использует в достаточной степени компоненты надежности, которые, так или иначе, имеются на подъемных установках, в частности на крановых установках или контейнерных мостовых кранах. Тормозное устройство обеспечивает, например, сохранность груза также при прерывании подачи энергии (обесточивание). Таким образом, даже в самом управляющем устройстве не требуется никаких дорогостоящих дополнительных элементов.
Пункты 2-5 формулы изобретения относятся к выполнению и регулированию или, соответственно, управлению тормозным устройством. Согласно пункту 2 формулы изобретения тормозная система при этом выполнена в виде тормоза, нагруженного пружиной, который имеет так называемый растормаживающий механизм, посредством которого можно освободить тормозную систему. Управляющее устройство при этом воздействует на растормаживающий механизм. Согласно пункту 3 формулы изобретения растормаживающий механизм выполнен в виде электрогидравлического растормаживающего механизма, в котором частотно-управляемый электродвигатель взаимодействует с гидронасосом, создающим давление, устанавливающее растормаживающий механизм против воздействия тормозной пружины и, таким образом, расцепляет тормозную механику. Управляющее устройство при этом воздействует на преобразователь частоты, который осуществляет управление электродвигателем электрогидравлического растормаживающего механизма посредством управляющей частоты и, таким образом, регулирует давление в гидравлической системе растормаживающего механизма. Такие электрогидравлические растормаживающие механизмы оправдали себя в качестве прочных и надежных, в частности, в случае промышленных тормозов, часто используемых в транспортирующем оборудовании.
Согласно пункту 4 формулы изобретения управляющее устройство устанавливает управляющую частоту в соответствии с сохраненным в памяти управляющего устройства профилем частоты. Выбор и форма профиля частоты позволяет простым способом приводить управляющее устройство в соответствие с системой «тормозное устройство - транспортирующее устройство». Так, например, могут учитываться специфические для транспортирующего устройства предельные условия, такие как, например, упругость каркаса крана и транспортирующего троса, и свойства тормоза (тип тормоза, взаимодействие корпуса тормоза и тормозных колодок, упругость в системе тормозных тяг или инерционность и замедления при управлении растормаживающим механизмом). Согласно пункту 5 формулы изобретения для регулирования скорости транспортировки при перемещении транспортируемого груза в освобожденное (ненагруженное) состояние предусмотрен профиль рампы, который в зависимости от превышения или недостижения первого и второго или соответственно верхнего и нижнего значений скорости транспортировки проходит с повышением или со снижением. Такие частотные рампы позволяют точное регулирование тормозного устройства. При этом профиль частотной рампы может быть выбран таким, что в достаточной степени исключаются обратные эффекты при торможении.
Пункты 6-8 формулы изобретения относятся ко второму тормозному устройству и его действию. С его помощью дополнительно повышается надежность в работе в случае перегрузки, и можно более эффективно предотвращать перегрузку важных компонентов привода в транспортирующем устройстве, или может снижаться его нагрузка. При этом, согласно пункту 6 формулы изобретения, предусмотрено второе тормозное устройство, которое также блокируется при сигнале о перегрузке. Это второе тормозное устройство позволяет, например, снизить внутренние напряжения в одной приводной ветви, прежде чем осуществится собственное освобождение транспортирующего устройства. Такие внутренние напряжения могут, например, возникнуть из-за задержанных воздействий на отдельные компоненты в приводной ветви. Второе тормозное устройство в случае перегрузки также способствует дополнительному предохранению транспортируемого груза. Согласно пункту 7 формулы изобретения управляющее устройство при этом управляет гидравлическим клапаном, который снижает давление в гидравлическом или электрогидравлическом растормаживающем механизме и, таким образом, непосредственно и без «обходных электрических путей» незамедлительно блокирует вторую тормозную систему. Согласно пункту 8 формулы изобретения гидравлический клапан при этом выполнен таким образом, что давление снижается настолько быстро, что тормозной эффект возникает в течение 40-70 мс (миллисекунд).
Пункты 9-10 формулы изобретения относятся к сигналу о перегрузке или распознаванию факта перегрузки. Согласно пункту 9 формулы изобретения сигнал о перегрузке выпускается посредством предохранительной муфты, в частности, при расцеплении половин такой предохранительной муфты. Использование такой предохранительной муфты для создания сигнала о перегрузке гарантирует, что, во-первых, надежно распознается заданная перегрузка и, во-вторых, уменьшается возможность того, что возникнут ошибочные срабатывания управляющего устройства, например, в случаях, в которых совершенно не возникло никакой перегрузки. При этом, согласно пункту 10 формулы изобретения, расцепление половин муфты регистрируется определением разности числа оборотов между обеими половинами муфты. В варианте выполнения, согласно пункту 11 формулы изобретения, расцепление или, соответственно, разъединение предохранительной муфты регистрируется посредством соответствующего датчика приближения, который в случае перегрузки обнаруживает движение расцепления половин муфты.
Пункт 12 формулы изобретения относится к транспортировочному устройству с управляющей и регулирующей системой согласно изобретению, причем транспортировочное устройство выполнено в виде крановой установки и, в частности, в виде контейнерного мостового перегружателя. Для таких транспортировочных установок управляющая и регулирующая система согласно изобретению может служить, в частности, в качестве компонента для так называемой системы Snag-Overload (перегрузки при застревании груза).
Пункт 13 формулы изобретения относится к контейнерному мостовому перегружателю, который снабжен двумя транспортировочными устройствами. При типичных контейнерных мостовых перегружателях, в частности, в случае длинного контейнерного спредера, предусмотрены две канатные транспортировочные установки, которые соответственно синхронно воздействуют на концы спредера, и, таким образом, контейнеры могут перемещаться с высокой скоростью переработки груза с небольшими колебательными и раскачивающими движениями. При этом канатные транспортирующие установки имеют общее управление. Согласно пункту 14 формулы изобретения управляющее устройство при этом может воздействовать на тормозное устройство одного из двух или обоих подъемных устройств, так чтобы в случае перегрузки могла бы быть реализована функция уравновешивания, посредством которой контейнерный спредер или подвешенный контейнер может из заклиненного (перекошенного) положения снова быть приведен в нормальное положение подъема (транспортирования).
Настоящее изобретение поясняется далее в качестве примера на основе варианта выполнения, схематически представленного на чертежах, где
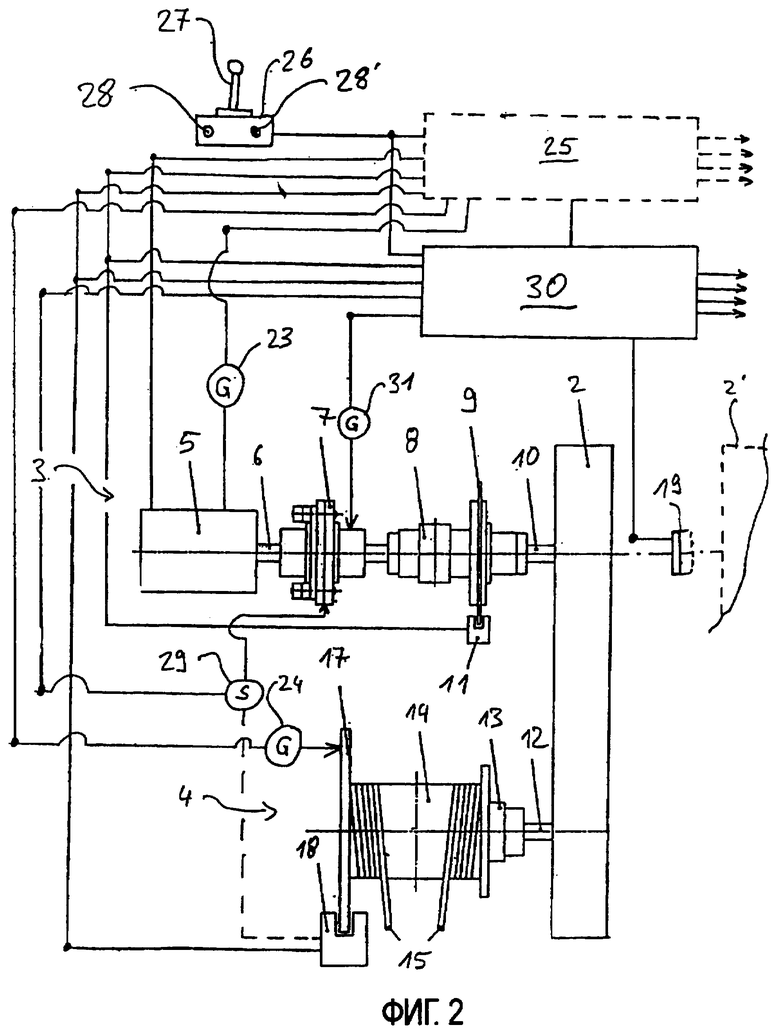
на фиг.1 показан подъемный механизм с двумя канатными подъемными установками для контейнерной крановой установки;
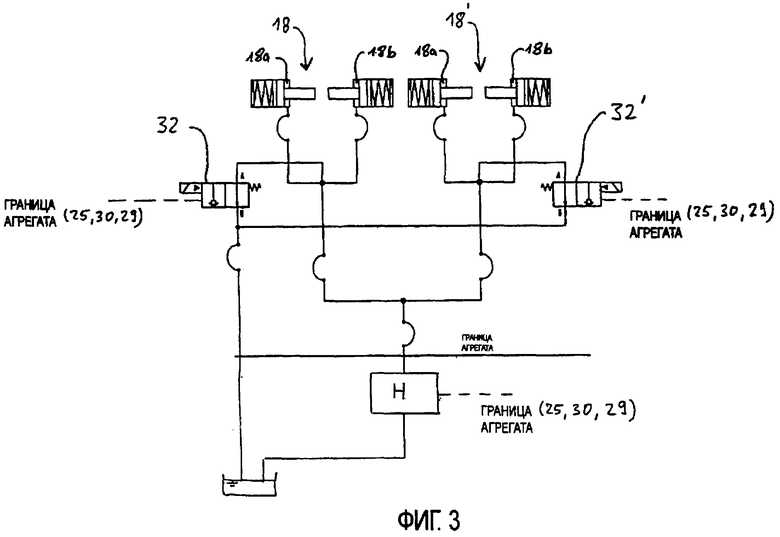
на фиг.2 показана часть подъемного механизма (одна из канатных подъемных установок), показанного на фиг.1, вместе с показанным схематически управляющим устройством; и
на фиг.3 показана гидравлическая схема, демонстрирующая управление предохранительным тормозом.
Представленный на фиг.1 подъемный механизм 1 содержит две канатные подъемные установки и имеет две связанные посредством передачи 2 идентичные приводные и ведомые ветви 3, 3'; 4, 4'. Далее поясняются основные компоненты левой приводной ветви 3 и левой ведомой ветви 4, причем идентичные компоненты правой приводной ветви 3' и правой ведомой ветви 4' приводятся соответственно с обозначениями, снабженными штрихом (Х').
Приводной двигатель 5, 5' посредством приводного вала 6, 6' оказывает воздействие на предохранительную муфту 7, 7', которая в свою очередь посредством другой муфты 8, 8' соединена с тормозным диском 9, 9' и посредством приводного вала 10, 10' приводит в действие передачу 2. На тормозной диск оказывает воздействие рабочий тормоз 11, 11'. Выходной вал 12, 12' передачи 2 через другую муфту 13, 13' воздействует на канатный барабан 14, 14', который перемещает вверх и вниз подвешенный на тяговом канате 15, 15' транспортируемый груз 16. Здесь под транспортируемом грузом речь идет о закрепленном на тяговом канате 15, 15' спредере c установленным на нем посредством угловых крепежных элементов контейнером (не показан). На канатном барабане 14, 14' закреплен другой тормозной диск 17, 17', на который воздействует предохранительный тормоз 18, 18'. Приводные ветви 3, 3' синхронизированы между собой посредством передачи 2, например, посредством схематически показанной на фиг.2 муфты 19, которая, например, выполнена в виде переключаемой магнитной муфты. Муфта приводных ветвей 3, 3' обеспечивает синхронизированное движение вверх и вниз транспортируемого груза 16. При расцепленной муфте 19 возможна также независимая работа приводных ветвей 3 и 3'. При таком варианте работы может выполняться также так называемая функция уравновешивания, чтобы подвешенный с перекосом груз снова приводить в горизонтальное положение. В нормальном режиме работы двигатели 5, 5' посредством передачи 2 приводят в действие канатные барабаны 14, 14' и перемещают, таким образом, транспортируемый груз вверх и вниз. Для управления как на приводной ветви 3, 3', так и на ведомой ветви 4, 4' расположены счетчики 23, 23' или 24, 24' числа оборотов.
Управление подъемной системой описывается далее посредством фиг.2. На фиг.2 показаны приводная и ведомая ветви 3, 4 левой канатной подъемной установки, показанной на фиг.1, и соединение для управляющего устройства 25 крана с управляющим элементом 26. При нормальной работе на управляющее устройство 25 посредством управляющего элемента 26 и непоказанных других элементов управления выдаются сигналы, которые затем посредством соответствующих линий управления оказывают воздействие на двигатель 5, рабочий тормоз 11 и, соответственно, предохранительный тормоз 18. Управляющее устройство 25 крана выполняет все управляющие и регулирующие функции, требуемые для нормальной работы. Управляющее устройство 25 крана воздействует при этом не только на показанную на фиг.2 половину подъемного механизма, но также и на правую, показанную на фиг.1 половину подъемного механизма. Движение вверх и вниз управляется при этом посредством управляющего элемента 26, имеющего так называемый джойстик 27, а также кнопки 28, 28' выравнивания, посредством которых в так называемом режиме уравновешивания половины подъемного механизма могут управляться по отдельности.
В случае перегрузки происходит следующее. Предохранительная муфта 7 рассчитана на определенный, максимально передаваемый момент вращения (от двигателя 5 на приводной вал 10). Если этот момент вращения превышен, то обе половины муфты предохранительной муфты 7 расцепляются. Таким образом, момент вращения при перегрузке возникает, если, например, произошло застревание транспортируемого груза 16 при перемещении вверх или если действующая сила тяжести транспортируемого груза слишком высока (транспортируемый груз слишком тяжел). Расцепление предохранительной муфты 7 отделяет привод двигателя от приводного вала 10. Приводной момент вращения больше не передается.
Расцепление предохранительной муфты 7 определяется датчиком 29 перегрузки, который выдает сигнал на управляющее устройство 30. Управляющее устройство 30 выдает, далее, сигнал на управляющее устройство 25 крана, которое после этого прерывает или останавливает нормальную работу крана. Далее управляющее устройство 30 выдает сигналы выключения на тормоза 11 и 18, которые блокируют как приводную ветвь 3, так и ведомую ветвь 4. Это препятствует самостоятельному опусканию отсоединенного от двигателя груза под силой тяжести.
Тормоза 11 и 18 в описанном здесь примере выполнены в виде так называемых промышленных тормозов, которые запираются под действием пружины и могут освобождаться посредством соответствующего растормаживающего механизма (не показан), который работает против усилия пружины. Такие растормаживающие механизмы работают во многих случаях посредством электрогидравлики, т.е. электродвигатель посредством гидравлического насоса создает давление в действующем против пружины рабочем цилиндре, который при достаточно высоком давлении посредством системы рычагов отпускает тормоз. Освобождение или растормаживание тормоза возможно также посредством других исполнительных элементов (магнитных, механических и др.) В случае электрогидравлических тормозов тормоз запирается, когда создается давление электрогидравлическим растормаживающим механизмом. Это случается обычно благодаря тому, что привод электродвигателя замедляется или останавливается.
Воздействующий на канатный барабан 14 предохранительный тормоз 18 может быть выполнен в виде непосредственно гидравлически размыкаемого предохранительного тормоза. На фиг.3 показаны тормоза 18 и 18', приводимые в действие посредством гидравлической системы H, которая в свою очередь получает сигналы для управления от управляющего устройства 25 крана, управляющего устройства 30 или от датчика 29 перегрузки и при необходимости выдает на эти системы 25, 30, 29 (штриховая линия). Тормоза 18, 18' запираются без давления и освобождаются, когда от гидравлической системы H через показанную гидравлическую линию в камерах (18a, 18b; 18a', 18b') создастся давление, которое освобождает тормоз против усилия пружины. Для торможения давление в этих камерах давления (18a, 18b; 18a', 18b') снижается, при необходимости, посредством гидравлической системы H. В представленном варианте выполнения процесс торможения, воздействующего на канатный барабан 14 тормоза 18, дополнительно ускоряется при настройке в гидравлическом контуре установочных клапанов 32, 32', которые ускоряют снижение давления тормозов 18, 18' и, тем самым, процесс торможения. Эти клапаны 32, 32' управляются непосредственно от самого датчика 29 перегрузки, либо посредством управляющего устройства 30, или посредством управляющего устройства 25 крана. Благодаря этому обеспечивается то, что груз непосредственно после распознавания состояния перегрузки посредством датчика 29 перегрузки дополнительно предохраняется путем блокирования канатного барабана 14. Давление снижается настолько быстро, что торможение осуществляется в промежуток 40-70 мс. Имеются также варианты выполнения, при которых торможение наступает уже после менее 40 мс (вплоть до 20 мс). В другом, не показанном примере выполнения тормоз 18 может также воздействовать на канатную тягу 15 или на выходной вал 2. Производственный тормоз 11 также запирается в ответ на сигнал управляющего устройства 30.
Непосредственно после установления перегрузки предохранительная муфта 7 разъединяется, и, таким образом, двигатель 5 отсоединяется от приводной ветви 3, а тормоза 11 и 18 запираются. Одновременно прекращается обслуживание крана или подъемного механизма посредством управляющего устройства 25 крана, функционирование которого прервано. Предпочтительно также половины 2 и 2' передачи могут отделиться друг от друга посредством управляемой муфты 19 (см. фиг.1).
Для возвращения подъемного механизма 1 в нормальное рабочее состояние происходит следующее. Посредством управляющего элемента 26 выдается сигнал освобождения на управляющее устройство 30. После этого оно отпускает (освобождает) предохранительный тормоз 18 и настраивает рабочий тормоз 11 таким образом, что он регулируемо освобождается и освобождает тормозной диск 9 настолько, что тот начинает проскальзывать под воздействием нагрузки. Благодаря этому транспортируемый груз 16 опускается под воздействием силы тяжести. Скорость опускания регистрируется посредством счетчика 31 числа оборотов, который выдает соответствующий сигнал на управляющее устройство 30. Настройка рабочего тормоза 11 осуществляется таким образом, что транспортируемый груз 16 опускается с постоянной скоростью. Эта скорость транспортировки соответствует числу оборотов, регистрируемому счетчиком 31 числа оборотов на расположенной со стороны передачи половине муфты предохранительной муфты 7.
Регулирование рабочего тормоза 11 для обеспечения по возможности постоянной скорости освобождения осуществляется в представленном примере выполнения по следующему принципу. Электрогидравлический растормаживающий механизм рабочего тормоза 11 имеет частотно-управляемый электродвигатель, приводящий в действие гидравлический насос. Частота управляющего сигнала электродвигателя устанавливается посредством управляющего устройства 30 и соответствующего преобразователя частоты. Пока зарегистрированное счетчиком 31 число оборотов лежит ниже минимального числа оборотов и, таким образом, скорость освобождения или скорость транспортировки лежит ниже минимальной скорости транспортировки, частота управляющего сигнала повышается, и, тем самым, тормоз продолжает освобождаться. Как только достигнута желательная скорость транспортировки или желательное число оборотов, частота управляющего сигнала двигателя поддерживается постоянной. Если скорость транспортировки или число оборотов превысит максимальное значение, то частота управляющего сигнала электродвигателя снизится. Таким образом, уменьшается число его оборотов, а также снижается действующее против усилия пружины давление, и, тем самым, повышается тормозное усилие, так что снижается скорость транспортировки или, соответственно, число оборотов.
Чтобы достичь по возможности постоянной скорости транспортировки, воздействующая на электродвигатель частота управляющего сигнала повышается или понижается по устанавливаемому или сохраненному в памяти профилю рампы. Эта частотная рампа настраивается на общую систему таким образом, что осуществляется непрерывное проскальзывание тормоза без так называемого эффекта вибрации или эффекта движения рывками. Для этого служит ПИД-регулятор.
Посредством клавиш 28, 28' уравновешивания регулируемое опускание может осуществляться также раздельно для соответствующих половин подъемного механизма 1. Это предпочтительно, в частности, в том случае, если транспортируемый груз перекосится или застрянет в транспортировочной шахте. Этот случай может возникнуть при транспортировке контейнеров. Поскольку транспортируемый груз 16 полностью перемещается в желательном освобожденном состоянии, то предохранительная муфта 6 регулируется и запирается. Все системы подвергаются функциональной проверке, управляющее устройство 30 дезактивируется и подъемный механизм 1 снова настраивается посредством управляющего устройства 25 крана.
Представленный выше для левой стороны подъемного механизма 1 в качестве примера процесс управления осуществляется точно так же для правой стороны подъемного механизма. При этом управляющее устройство 30 может быть выполнено таким образом, что оно оказывает воздействие на обе половины привода. Однако также возможно, чтобы было предусмотрено два связанных между собой управляющих устройства 30 или 30', которые при необходимости могут даже взаимозаменяться так, что для аварийной функции перегрузки создается резерв, который повышает надежность работы.
В представленном выше примере выполнения настраивают предохранительный тормоз 18 и рабочий тормоз 11. Эти тормоза, так или иначе, имеются в обычном подъемном механизме 1. Таким образом, не требуется никаких дополнительных компонентов. В другом варианте выполнения также возможно, чтобы регулируемое опускание транспортируемого груза в случае перегрузки регулировалось посредством имеющегося дополнительно тормозного устройства. Также можно управлять предохранительным тормозом 18, 18', который воздействует на канатный барабан 14, 14', регулируемо, и посредством этого тормоза достигать освобожденного состояния.
Кроме описанных промышленных тормозов опускание можно контролировать также посредством активно действующего тормоза. Такие активно действующие тормоза можно при определенных обстоятельствах регулировать более простым образом для осуществления опускания с постоянной скоростью. Возможны, например, гидравлические тормоза, пневматические тормоза, а также электрические тормоза с линейным приводом. Их можно предусматривать также в дополнение к имеющимся тормозам для случая застревания груза (Snag-Load).
Описанная выше система управления и регулирования представлена здесь в связи с подъемным механизмом контейнерного крана. Принцип управления для бесприводного опускания транспортируемого груза в случае перегрузки можно, однако, также с успехом перенести на другие подъемные устройства, такие как, например, лифты, канатные дороги, подъемные установки и т.д.
Другие варианты выполнения и альтернативные решения вытекают для специалиста в рамках приведенных ниже пунктов формулы изобретения.
Изобретение относится к управляющей и регулирующей системе для предохранения транспортирующего устройства в случае перегрузки, транспортирующему устройству с управляющей и регулирующей системой и крановой установке с двумя транспортирующими устройствами. Управляющая и регулирующая система для предохранения транспортирующего устройства, в частности крановой установки, содержит воздействующее на транспортирующее устройство тормозное устройство, управляющее устройство для тормозного устройства, датчик перегрузки, регистрирующий перегрузку и выдающий сигнал о перегрузке, и датчик скорости, регистрирующий скорость транспортируемого груза и выдающий сигнала о скорости. Управляющее устройство в ответ на сигнал о перегрузке оказывает воздействие на тормозное устройство таким образом, что оно блокирует транспортирующее устройство и предохраняет транспортируемый груз. В ответ на последующий сигнал освобождения транспортирующее устройство разблокируется таким образом, что транспортирующее устройство перемещается под воздействием нагрузки транспортируемого груза в состояние освобождения. Воздействие тормозного устройства на транспортировочное устройство, в соответствии с сигналом от датчика скорости, регулируется таким образом, что транспортируемый груз перемещается в освобожденное состояние с достаточно постоянной скоростью транспортировки. Транспортирующее устройство с управляющей и регулирующей системой выполнено в виде канатной подъемной установки, в виде крановой установки или в виде компонента контейнерной установки. Крановая установка содержит два транспортирующих устройства, при этом при перемещении вверх и вниз контейнерного спредера оба транспортирующих устройства синхронизированы и имеют общее управляющее устройство. Достигается предохранение от перегрузок, а также упрощение транспортировки груза при перегрузке. 3 н. и 11 з.п. ф-лы, 3 ил.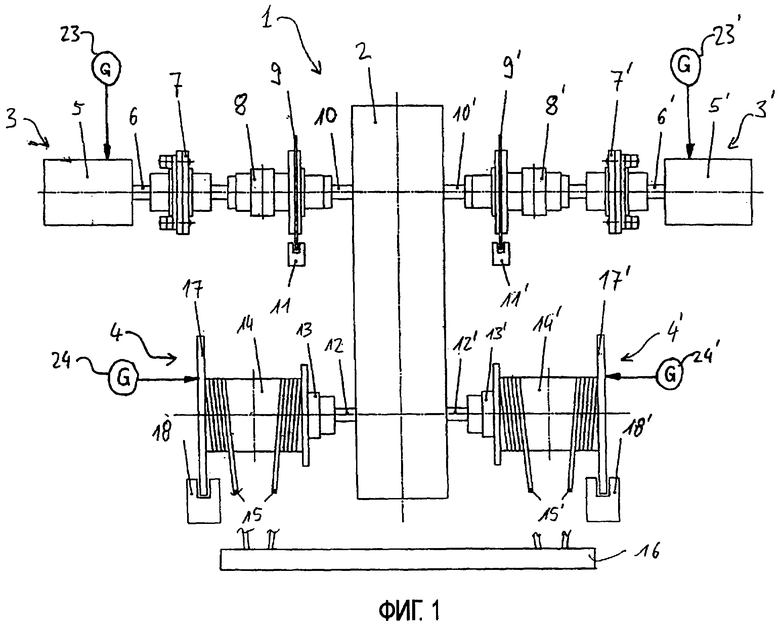
1. Управляющая и регулирующая система для предохранения транспортирующего устройства (1), в частности крановой установки, в случае перегрузки, содержащая воздействующее на транспортирующее устройство (1) тормозное устройство (11, 11', 18, 18'), управляющее устройство (30) для тормозного устройства (11, 11', 18, 18'), датчик (29) перегрузки, регистрирующий перегрузку и выдающий сигнал о перегрузке, и датчик (31, 24, 24') скорости, регистрирующий скорость транспортируемого груза и выдающий сигнал о скорости, причем управляющее устройство (30) в ответ на сигнал о перегрузке оказывает воздействие на тормозное устройство (11, 11', 18, 18') таким образом, что оно блокирует транспортирующее устройство (1) и, таким образом, предохраняет транспортируемый груз (16), и в ответ на последующий сигнал освобождения транспортирующее устройство (1) разблокируется таким образом, что транспортирующее устройство (1) перемещается под воздействием нагрузки транспортируемого груза (16) в состояние освобождения, и воздействие тормозного устройства (11, 11', 18, 18') на транспортировочное устройство в соответствии с сигналом от датчика (31, 24, 24') скорости регулируется таким образом, что транспортируемый груз перемещается в освобожденное состояние с достаточно постоянной скоростью транспортировки.
2. Управляющая и регулирующая система по п.1, в которой тормозной блок (11, 11', 18, 18') выполнен в виде нагруженного пружиной тормоза с растормаживающим механизмом, причем управляющее устройство (30) управляет растормаживающим механизмом.
3. Управляющая и регулирующая система по п.2, в которой растормаживающий механизм выполнен в виде электрогидравлического растормаживающего механизма, и управляющее устройство (30) имеет и соответственно им управляет преобразователь частоты, управляющий электрогидравлическим растормаживающим механизмом посредством частоты управляющего сигнала.
4. Управляющая и регулирующая система по п.3, в которой управляющее устройство (30) устанавливает частоту управляющего сигнала в соответствии с сохраненным в памяти профилем частоты.
5. Управляющая и регулирующая система по п.4, в которой управляющий профиль выполнен в виде рампового профиля, при этом управляющее устройство (30) при превышении первой скорости транспортировки осуществляет управление по поднимающейся частотной рампе и при значении ниже второй скорости транспортировки - по понижающейся частотной рампе.
6. Управляющая и регулирующая система по любому из пп.1-5, в которой управляющее устройство (30) в ответ на сигнал о перегрузке блокирует второе тормозное устройство (11, 11', 18, 18').
7. Управляющая и регулирующая система по п.6, в которой управляющее устройство (30) регулирует гидравлический клапан (32, 32'), снижающий давление в гидравлическом или электрогидравлическом блоке растормаживания второго тормозного устройства для его блокировки.
8. Управляющая и регулирующая система по п.7, в которой гидравлический клапан (32, 32') выполнен таким образом, что тормозное воздействие осуществляется в течение 40-70 мс.
9. Управляющая и регулирующая система по одному из предыдущих пунктов, в которой сигнал о перегрузке выдается посредством предохранительной муфты (7, 7'), в частности расцепления предохранительной муфты.
10. Управляющая и регулирующая система по п.9, в которой расцепление предохранительной муфты (7, 7') регистрируется путем определения разности числа оборотов между обеими половинами муфты.
11. Управляющая и регулирующая система по п.9, в которой расцепление предохранительной муфты (7, 7') регистрируется путем определения движения расцепления одной половины муфты, в частности посредством датчика приближения.
12. Транспортирующее устройство с управляющей и регулирующей системой по любому из пп.1-10, причем транспортирующее устройство выполнено в виде канатной подъемной установки, в виде крановой установки или в виде компонента контейнерной крановой установки.
13. Крановая установка с двумя транспортирующими устройствами согласно п.12, которые для перемещения вверх и вниз контейнерного спредера синхронизированы, причем оба транспортных устройства имеют общее управляющее устройство (30).
14. Крановая установка по п.13, в которой в случае перегрузки синхронизация транспортировочных устройств может быть отменена, и управляющее устройство (30) в ответ на сигнал освобождения оказывает выборочное действие на тормозное устройство (11, 11', 18, 18') одного из двух или обоих транспортировочных устройств.
| RU 2004128519 А, 20.03.2005 | |||
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2003 |
|
RU2265571C2 |
| DE 20219282 U1, 15.04.2004 | |||
| DE 3341414 A1, 30.05.1985 | |||
| US 4821842 A, 18.04.1989. | |||

