Изобретение относится к области подъемно-транспортного машиностроения, в частности к талям электрическим, используемым в разного рода передвижных и стационарных грузоподъемных установках. В предлагаемой конструкции грузоподъемное устройство (ГУ) относится к талям с активным приводом крюков захвата для дистанционного зацепления (отцепления) груза и определения его величины.
Известен аналог тали электрической (1), содержащей корпус, на котором сверху смонтированы две тележки с направляющими роликами, установленный внутри барабан с канатом, редуктор связанный с барабаном и два блока, установленные на корпусе и образующие полиспаст с крюковой подвеской (SU 1823860 A3, 23.06.93).
К недостаткам этой тали следует отнести сложность конструктивного исполнения, заключающуюся в том, что кинематическая и электрическая схемы конструктивно реализованы таким образом, что шкаф с электроаппаратурой, совмещенный с корпусом, и редуктор, связанный с барабаном, а также тормозное устройство развивают габариты и массу изделия при низком КПД, точности, плавности перемещения груза и высокой энергоемкости.
Наиболее близким к предлагаемому изобретению по технической сущности следует отнести грузоподъемное устройство (2), которое содержит две тележки, барабан с канатом, установленный внутри корпуса, мотор-редуктор, связанный с барабаном и два блока, установленные на боковых щеках корпуса с внутренней стороны и образующие совместно с крюковой подвеской устройства шестикратный полиспаст. Мотор-редуктор выполнен с установленной внутри барабана планетарной ступенью, которая является одной из опор барабана, также он включает в себя самотормозящуюся червячную ступень, связанную с электромагнитным тормозом, а укладку каната обеспечивают канатоукладчики, поддерживающие канат сверху (RU, патент 2148551, В 66, D 3/20, 03.07.97).
Известное грузоподъемное устройство неудобно в эксплуатации, поскольку затрудняет работу стропальщиков.
Задачей заявленного изобретения является повышение удобства эксплуатации и эффективность выполнения грузоподъемных работ при получении технического результата, заключающего в возможности измерения величины груза, а также в повышении надежности его удержания, точность перемещения груза.
Сущность изобретения заключается в том, что для получения указанного технического результата грузоподъемное устройство, содержащее корпус с присоединенными к нему двумя приводными тележками продольного перемещения груза, барабан для каната трособлочной системы с крюковой подвеской, мотор-редуктор привода барабана, установленный на корпусе устройства электромагнитный тормоз конического типа для соединения с конусом вала червячного колеса червячной пары мотор-редуктора барабана, и пульт управления, снабжено измерительным устройством величины поднимаемого груза, которое выполнено в виде цилиндрического корпуса, расположенного с внутренней стороны щеки корпуса грузоподъемного устройства, внутри цилиндрического корпуса измерительного устройства расположена пружина со штоком, заканчивающимся резьбой с присоединенной к ней проушиной, к которой прикреплен канат трособлочной системы, в верхней части штока установлен поводок, соединенный с контактом расположенного с внешней стороны щеки корпуса грузоподъемного устройства датчика потенциометрического типа для подачи электрического сигнала, пропорционального величине груза, через усилитель блока питания и устройство сравнения на табло, размещенное на пульте управления этого устройства, при этом грузоподъемное устройство снабжено установленным на корпусе грузоподъемного устройства дисковым тормозом, имеющим тормозной диск на конце вала червячного колеса упомянутой червячной пары.
В устройстве крюковая подвеска выполнена с двумя крюками для захвата груза.
Устройство может быть снабжено концевыми выключателями для ограничения продольного перемещения устройства.
Задача и указанный выше технический результат, а именно:
повышение эффективности, безопасности, точности и плавности перемещения груза при одновременном увеличении надежности и долговечности обеспечиваются путем использования грузоподъемного устройства, оснащенного измерительным устройством с цифровым представлением на табло величины поднимаемого груза, также становится возможным выполнение грузоподъемных работ в местах, где исключено применение стропальщика (емкости с химическими, радиоактивными веществами и др.). За счет применения на ГУ двух тормозов (конического и дискового типа) достигается высокая точность перемещения груза, и при этом уменьшается время зацепления (отцепления груза) и соответственно повышается производительность и эффективность выполнения грузоподъемных работ.
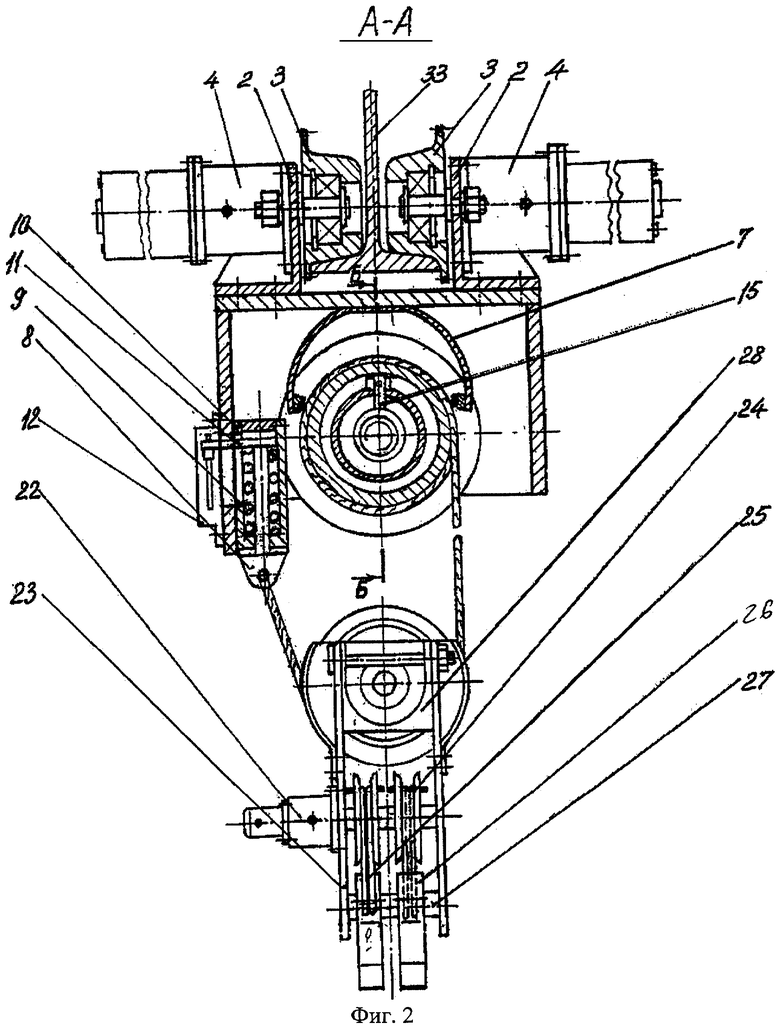
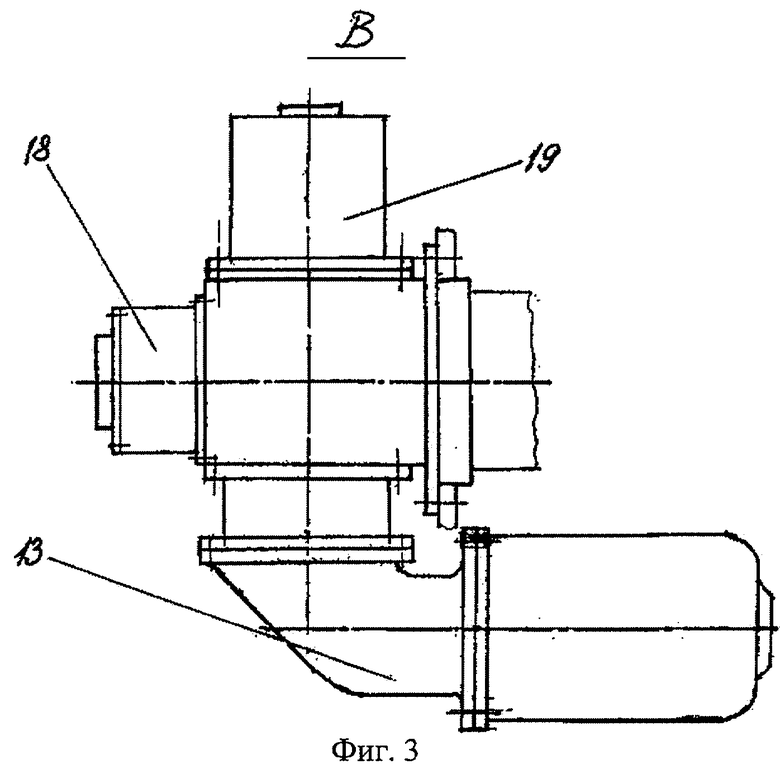
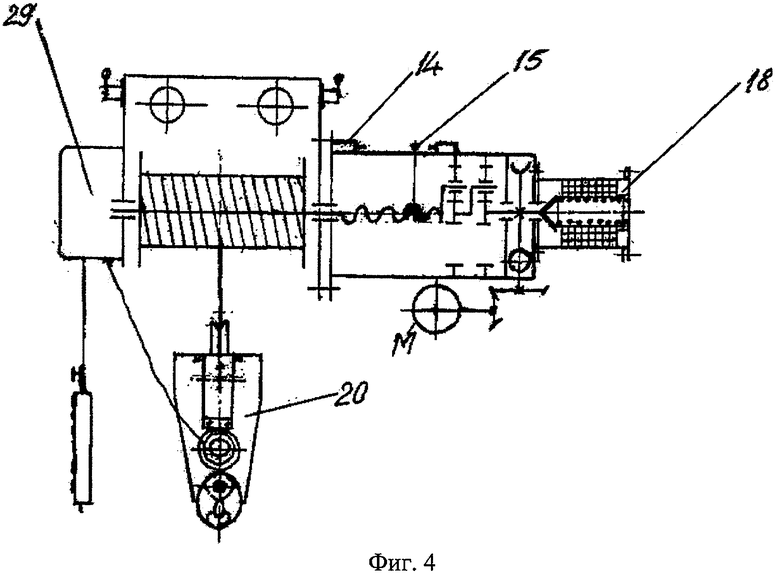
Изобретение поясняется следующими чертежами и схемами: на фиг.1 представлен продольный разрез грузоподъемного устройства; на фиг.2 - разрез А-А фиг.1; на фиг.3 - вид мотор-редуктора привода барабана; на фиг.4 - электрокинематическая схема грузоподъемного устройства.
Грузоподъемное устройство (ГУ) состоит из корпуса 1, сверху на котором устанавливаются две приводные тележки 2 с направляющими роликами 3, приводимыми во вращение мотор-редукторами 4.
Внутри корпуса установлен барабан 5, оснащенный канатом 6, прижимаемым канатоукладчиком рессорного типа 7. Канат одним конном крепится к барабану, а другим к проушине штока 8, проходящего через пружину 9, расположенную внутри цилиндрического корпуса измерительного устройства 10, расположенного в нижней части внутренней поверхности щеки корпуса 1. В верхней части штока установлен поводок 11, взаимодействующий с датчиком потенциометрического типа 12 (резистором), расположенным с внешней стороны соответствующей (левой) щеки корпуса ГУ. Во внутренней полости барабана расположена планетарная ступень мотор-редуктора 13, на верхней поверхности которого размещены концевые выключатели 14, срабатывающие от подвижного упора 15, которые ограничивают подъем (опускание) груза, а концевые выключатели 16 и 17 ограничивают продольное перемещение ГУ.
Мотор-редуктор крепится четырьмя болтами к торцевой стенке корпуса 1 и является одной из опор барабана. На корпусе мотор-редуктора устанавливаются два электромагнитных тормоза 18 и 19 (фиг.3) конического и дискового типа - один сбоку с тормозящим диском, расположенным на свободном конце червячного вала, а другой на его торцевой поверхности (фиг.3). Тормозящий конус устанавливается на конце вала червячного колеса. Это позволяет совместно с самотормозящейся червячной парой уменьшить инерционные выбеги, осуществить несползание груза и обеспечивать высокую точность перемещения груза.
Зацепление (отцепление) и подъем груза осуществляется захватом (крюковой подвеской) 20, выполненным в виде корпуса, в верхней части которого в кронштейнах на оси установлен блок с ручьем под канат, а дистанционное управление грузонесущими крюками 21, 26 осуществляется с помощью мотор-редуктора 22, установленного на боковой щеке 23, вал которого приводят во вращение блоки 24. В ручьях блоков 24 запасованы гибкие поводки 25, нижние концы которых крепятся на внешней поверхности крюков с помощью втулок и компенсационных пружин зажимами. Крюки расположены на оси 27 в нижней части щек, вверху соединенных между собой кронштейнами 28.
Питание электродвигателей подъема, продольного перемещения груза, а также мотор-редуктора подъема (опускания) грузонесущих крюков осуществляется блоком питания 29, в состав которого входят: трансформатор, выпрямитель, а также электронный блок плавного пуска и защиты от перегрузки, устройство сравнения (УС), осуществляющее формирование электрического сигнала, пропорционального величине поднимаемого груза, отображаемого на табло с жидкокристаллическим дисплеем 30.
Регулятор оборотов 31, расположенный на пульте управления 32, выполнен в виде плоского резистора и позволяет изменять скорость подъема (опускания) груза.
Грузоподъемное устройство с захватом работает в двух режимах.
В режиме тали электрической, которая монтируется на двутавровой балке 33 и осуществляет подъем (пускание) груза путем включения электродвигателя мотор-редуктора 13, в кинематическую схему которого входят: коническая, червячная и планетарная ступени, вращающие барабан 5, наматывающий канат, который с помощью захвата (крюковой подвески) 20 с дистанционным управлением крюками 21, 26, разведение и сведение которых осуществляется мотор-редуктором 22, выходной вал которого, вращая блоки 24 посредством гибких поводков, разводит (сводит реверсным включением) крюки 21, 26 тем самым осуществляя зацепление (отцепление) груза без участия стропальщика, что повышает эффективность и безопасность грузоподъемных работ.
В случае превышения величины поднимаемого груза на 25% от номинальной срабатывает электронный блок защиты от перегрузки электродвигателя, включаются тормоза 18, 19 и подается звуковой сигнал.
Работа грузоподъемного устройства в динамометрическом режиме осуществляется путем включения измерительного устройства 10, в котором при подъеме груза штоком 8 сжимается пружина 9, взаимодействующая через поводок 11 с датчиком потенциометрического типа 12, изменяя его сопротивление, создает электрический потенциал, пропорциональный величине поднимаемого груза, с помощью устройства сравнения отображаемый на жидкокристаллическом дисплее табло 30 пульта управления оператора. Точность определения величины поднимаемого груза определяется тарировкой пружины и соответствующей настройкой устройства сравнения, входящего в состав блока питания (БП).
Продольное перемещение груза осуществляется путем включения мотор-редукторов 4, выходные валы которых вращают установленные на них шестерни, входящие в зацепление с зубчатыми венцами опорных роликов тележек 2.
Предлагаемая конструкция ГУ позволяет повысить эффективность, безопасность выполнения грузоподъемных работ, поскольку зацепление (отцепление) груза производится дистанционно с пульта оператора без участия стропальщика. Также появляется возможность использовать ГУ в местах, где исключено присутствие стропальщика (агрессивные, ядовитые среды, радиоактивные шахты и др.), а применение устройства плавного пуска и электронного блока защиты от перегрузок увеличивает на 60...70% срок службы узлов и деталей ГУ с одновременным повышением безопасности и надежности.
Работа ГУ в динамометрическом режиме не требует использования крановых весов и динамометров, поскольку измерительное устройство, кинематически встроенное в схему полиспаста, совместно с устройством сравнения позволяет выполнять их функции с требуемой точностью.
Таким образом, экономическая эффективность ГУ достигается совместной работой ГУ и захвата (крюковой подвески) с дистанционным управлением грузонесущими крюками, измерительным устройством, исключающим применение крановых весов и динамометров, а устройство плавного пуска и защиты от перегрузок продлевает срок службы изделия, что в конечном итоге делает конструкцию ГУ многофункциональной, безопасной, надежной и долговечной.
Источники информации
1. SU, патент, 1823860, B 66 D 1/20, 23.06.93.
2. RU, патент, 2148551, B 66 D 3/20, 03.07.97.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 1997 |
|
RU2148551C1 |
| ТАЛЬ ПНЕВМАТИЧЕСКАЯ | 2002 |
|
RU2208572C1 |
| ТАЛЬ ПНЕВМАТИЧЕСКАЯ | 2004 |
|
RU2265572C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДЕМОНТАЖА ТАЛИ ЭЛЕКТРИЧЕСКОЙ КАНАТНОЙ | 2013 |
|
RU2546356C2 |
| Рабочий грузоподъемный орган экскаватора | 2016 |
|
RU2676586C1 |
| Лебедка | 1988 |
|
SU1505885A1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| РУЧНАЯ ТАЛЬ | 1992 |
|
RU2023647C1 |
| КРЮКОВАЯ ПОДВЕСКА | 2000 |
|
RU2175635C1 |
| Крюковая подвеска с поворотом крюка | 1980 |
|
SU933604A1 |
Изобретение относится к грузоподъемным устройствам. Согласно изобретению устройство снабжено измерительным устройством величины поднимаемого груза, которое выполнено в виде цилиндрического корпуса, расположенного с внутренней стороны щеки корпуса грузоподъемного устройства. Внутри цилиндрического корпуса измерительного устройства расположена пружина со штоком, заканчивающимся резьбой с присоединенной к ней проушиной, к которой прикреплен канат трособлочной системы крюковой подвески. В верхней части штока установлен поводок, соединенный с контактом расположенного с внешней стороны щеки корпуса грузоподъемного устройства датчика потенциометрического типа для подачи электрического сигнала, пропорционального величине груза, через усилитель блока питания и устройство сравнения на табло, размещенное на пульте управления этого устройства. Устройство снабжено также установленным на его корпусе дисковым тормозом, имеющим тормозной диск на конце вала червячного колеса упомянутой червячной пары. Изобретение позволяет обеспечить повышение надежности устройства и повышение удобства его эксплуатации. 2 з.п. ф-лы, 4 ил.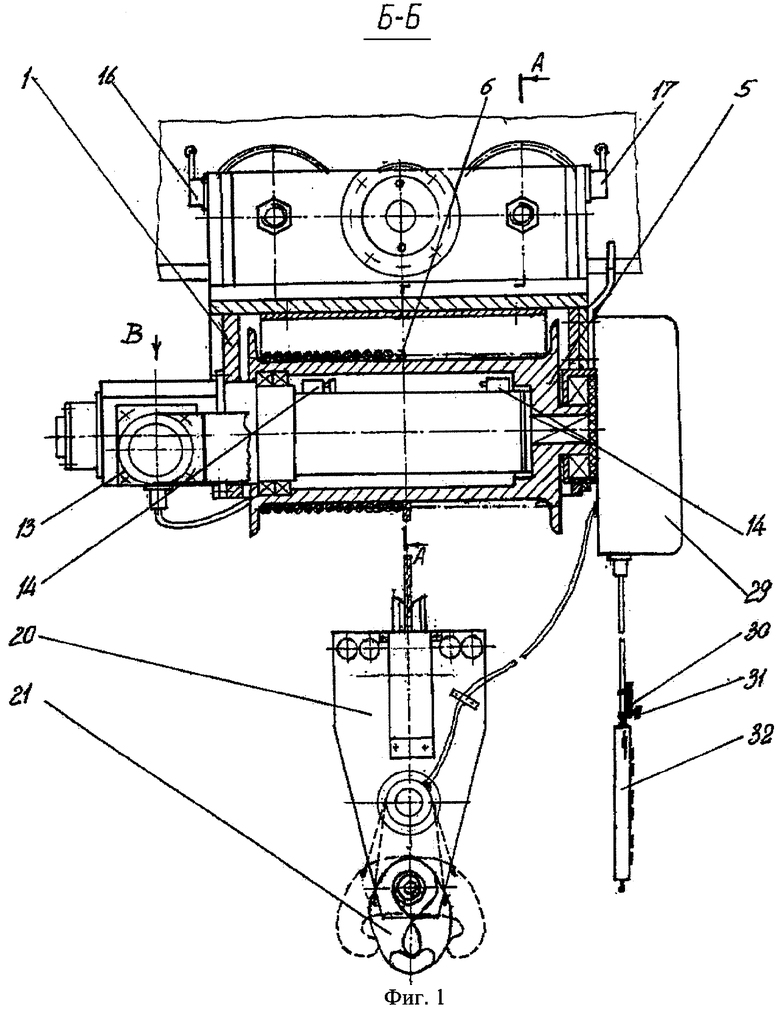
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 1997 |
|
RU2148551C1 |
| Устройство для измерения веса груза | 1956 |
|
SU116676A1 |
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ СТРЕЛОВОГО КРАНА | 1991 |
|
RU2011632C1 |

