Настоящая заявка претендует на приоритет предварительной патентной заявки №60/813483 «HANDOFF SELECTION FOR WIRELESS COMMUNICATION SYSTEMS», поданной 13 июня 2006 года, права на которую принадлежат правопреемнику настоящего изобретения и содержание которой включено сюда по ссылке.
Область техники, к которой относится изобретение
Настоящее изобретение относится в целом к области связи и, в частности, к методикам сбора данных для системы беспроводной связи.
Уровень техники
Системы беспроводной связи повсеместно развернуты для обеспечения различных услуг связи, таких как голосовая, видео, пакетные данные, обмен сообщениями, радиовещание и т.д. Эти системы могут представлять собой системы с многостанционным доступом, которые способны поддерживать связь для множества пользователей путем разделения имеющихся системных ресурсов. Примеры указанных систем с многостанционным доступом включают в себя системы с множественным доступом с кодовым разделением (CDMA), системы с множественным доступом с временным разделением (TDMA), системы с множественным доступом с частотным разделением (FDMA), ортогональные системы FDMA (OFDMA) и системы FDMA с одной несущей (SC-FDMA).
Система беспроводной связи может включать в себя множество базовых станций, которые поддерживают связь для множества терминалов. Терминал (например, сотовый телефон) в любой данный момент времени может находиться в зоне покрытия нулевой, одной или множества базовых станций. Терминал может быть включен или может утратить зону покрытия, и, таким образом, может быть неизвестно, какие базовые станции могут быть приняты. Терминал может выполнить сбор данных для обнаружения базовых станций и получения временной синхронизации, а также другой информации для обнаруженных базовых станций. Терминал может использовать полученную информацию для доступа системы через обнаруженную базовую станцию.
Каждая базовая станция может осуществлять передачи, помогающие терминалам выполнять сбор данных. Эти передачи представляют собой служебные данные и должны отсылаться наиболее рациональным образом. Кроме того, эти передачи должны предоставить терминалам возможность выполнять сбор данных как можно быстрее и надежнее.
Сущность изобретения
Здесь описаны методики посылки базовой станцией информации о секторе/системе в пилот-сигналах с временным мультиплексированием (TDM). Также описаны методики для получения терминалом информации о секторе/системе из пилот-сигналов TDM. Согласно одному аспекту информацию о секторе/системе посылают в пилот-сигналах TDM с использованием иерархической структуры пилот-сигнала. Для иерархической структуры пилот-сигнала множество наборов бит для информации о секторе/системе могут посылаться во множестве пилот-сигналов TDM, а набор бит, посланных в данном пилот-сигнале TDM, может включать в себя биты, посланные в одном или множестве предыдущих пилот-сигналах TDM. Иерархическая структура пилот-сигнала может снизить сложность сбора данных и повысить качество обнаружения для терминалов, допуская относительно большое число посылаемых бит для информации о секторе/системе.
В одном образце 3-уровневой иерархической структуры пилот-сигнала базовая станция может создать первый пилот-сигнал TDM на основе первого набора бит для информации о секторе/системе. Базовая станция может создать второй пилот-сигнал TDM на основе второго набора бит для информации о секторе/системе, причем второй набор содержит в себе первый набор. Базовая станция может создать третий пилот-сигнал TDM на основе всех бит для информации о секторе/системе. Базовая станция может послать первый, второй и третий пилот-сигналы TDM в первом, втором и третьем временных интервалах соответственно, в преамбуле, которая передается периодически.
Терминал может осуществить обнаружение для первого пилот-сигнала TDM для получения первого обнаруженного значения для первого набора бит, посланного в первом пилот-сигнале TDM. Терминал может осуществить обнаружение для второго пилот-сигнала TDM на основе первого обнаруженного значения для получения второго обнаруженного значения для второго набора бит, посланного во втором пилот-сигнале TDM. Терминал может осуществить обнаружение для третьего пилот-сигнала TDM на основе первого и второго обнаруженных значений для получения третьего обнаруженного значения для всех бит информации о секторе/системе, посланного в третьем пилот-сигнале TDM.
Ниже описывается 2-уровневая иерархическая структура пилот-сигнала и не иерархическая структура пилот-сигнала. Также ниже подробно описываются различные аспекты и признаки изобретения.
Краткое описание чертежей
Фиг.1 - система беспроводной связи;
Фиг.2 - образец структуры суперкадра и структуры преамбулы;
Фиг.3 - образец пилот-сигналов TDM 1, 2 и 3 в частотной области;
Фиг.4А - образец 3-уровневой иерархической структуры пилот-сигнала;
Фиг.4В - образец 2-уровневой иерархической структуры пилот-сигнала;
Фиг.4С - образец 3-уровневой не иерархической структуры пилот-сигнала;
Фиг.5 - блок-схема базовой станции и терминала;
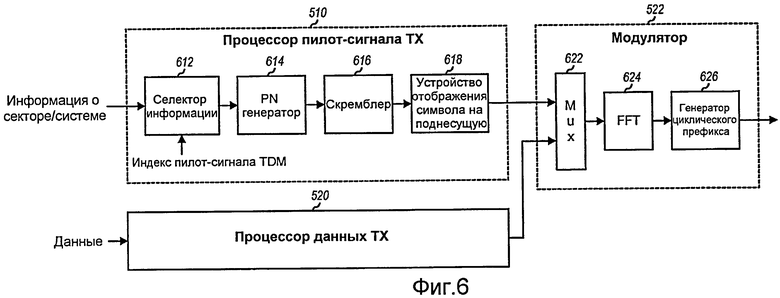
Фиг.6 - блок-схема процессора передачи пилот-сигнала (ТХ) и модулятора на базовой станции;
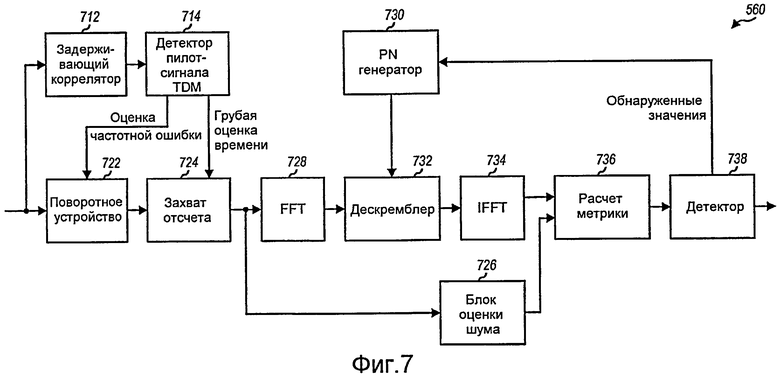
Фиг.7 - блок-схема процессора сбора данных в терминале;
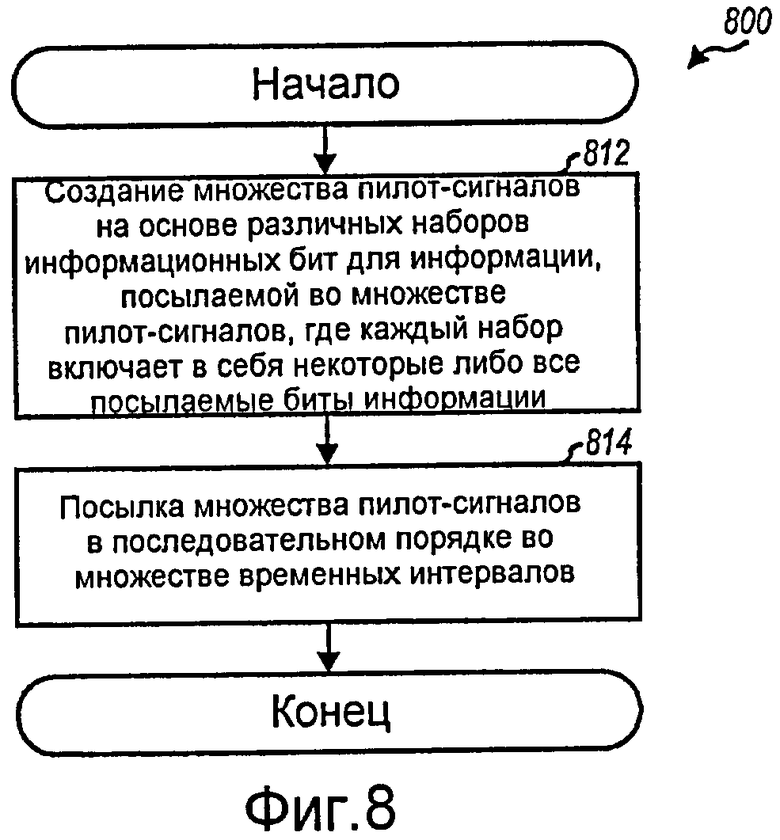
Фиг.8 - процесс, выполняемый базовой станцией при посылке пилот-сигналов TDM;
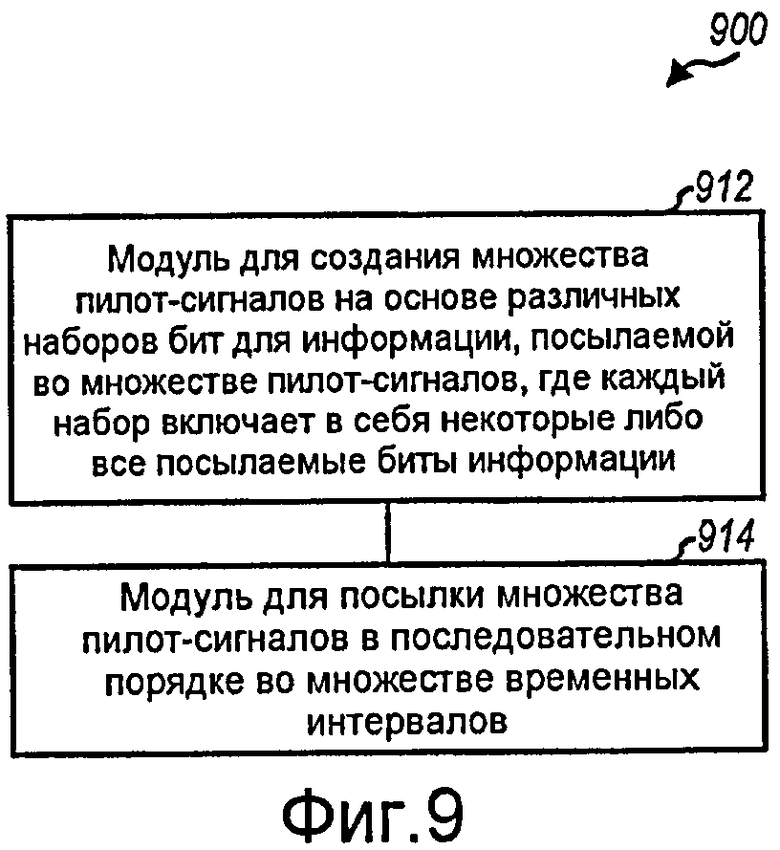
Фиг.9 - устройство для посылки пилот-сигналов TDM;
Фиг.10 - процесс, выполняемый терминалом при приеме пилот-сигналов TDM;
Фиг.11 - устройство для приема пилот-сигналов TDM.
Подробное описание изобретения
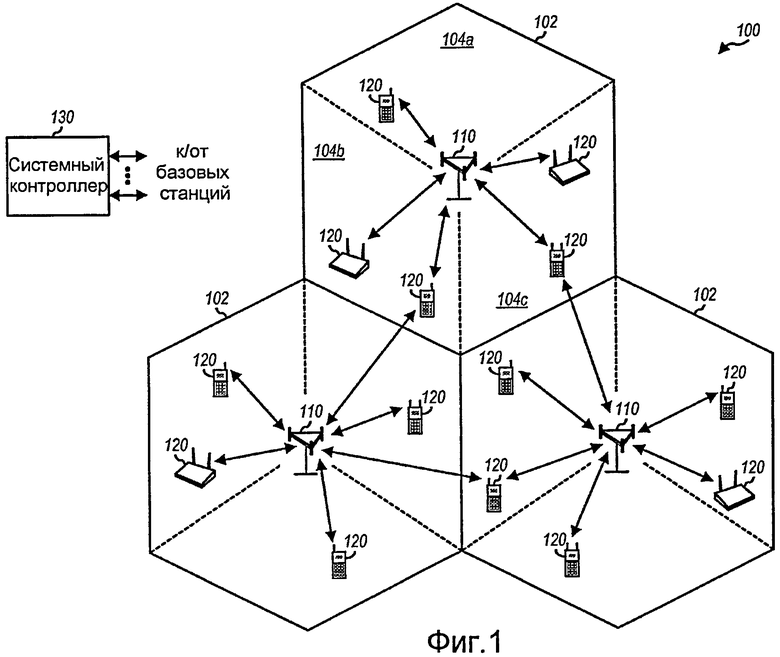
На фиг.1 показана система 100 беспроводной связи с множеством базовых станций 110 и множеством терминалов 120. Базовая станция является станцией, которая осуществляет связь с терминалами. Также можно осуществить вызов базовой станции, причем она может обладать некоторыми или всеми функциональными возможностями точки доступа, узла В, выделенного узла В и т.д. Каждая базовая станция 110 обеспечивает покрытие услугами связи для конкретной географической зоны 102. Термин «сота» может относиться к базовой станции и/или ее зоне покрытия, в зависимости от контекста, в котором используется этот термин. Для расширения возможностей системы зона покрытия базовой станции может быть разделена на множество более мелких зон, например три меньшие зоны 104а, 104b и 104с. Каждая меньшая зона может обслуживаться соответствующей базовой приемопередающей станцией (BTS). Термин «сектор» может относиться к BTS и/или ее зоне покрытия в зависимости от контекста, в котором используется этот термин. Для соты, разбитой на секторы, станции BTS для всех секторов этой соты, как правило, находятся вместе, внутри базовой станции для этой соты. Описанные здесь методики можно использовать для систем с сотами, разбитыми на секторы, а также для систем с сотами, не разбитыми на секторы. Для ясности, описанные ниже методики относятся к системе с сотами, разбитыми на секторы.
Терминалы 120, как правило, распределены по всей системе, причем каждый терминал может быть стационарным или мобильным. Терминал может быть вызван, и он может содержать некоторые или все функциональные возможности терминала доступа, мобильной станции, пользовательского оборудования, абонентского блока, станции и т.д. Терминал может представлять собой сотовый телефон, персональный цифровой помощник (PDA), устройство беспроводной связи, беспроводный модем, карманное устройство, портативный компьютер и т.д. Терминал в любой данный момент может осуществлять связь с нулевой, одной или множеством базовых станций по прямой и/или обратной линии связи. Прямая линия связи (или нисходящая линия связи) относится к линии связи от базовых станций к терминалам, а обратная линия связи (или восходящая линия связи) относится к линии связи от терминалов к базовым станциям.
Для централизованной архитектуры системный контроллер 130 соединяется с базовыми станциями 110 и обеспечивает координацию и управление для этих базовых станций. Системный контроллер 130 может представлять собой единый сетевой объект или совокупность сетевых объектов. Для распределенной архитектуры базовые станции 110 могут осуществлять связь друг с другом, когда это необходимо.
Описанные здесь методики можно использовать для различных систем беспроводной связи, таких как системы CDMA, TDMA, FDMA, OFDMA и SC-FDMA. В системе CDMA используется мультиплексирование с кодовым разделением (CDM), и передачи рассылаются с различными ортогональными кодами. В системе TDMA используется мультиплексирование с временным разделением (TDM), и передачи рассылаются в различных временных интервалах. В системе FDMA используется мультиплексирование с частотным разделением (FDM) и передачи рассылаются на различных поднесущих. В системе OFDMA используется мультиплексирование с ортогональным частотным разделением (OFDM), а в системе SC-FDMA используется мультиплексирование с частотным разделением и одной несущей (SC-FDM). В OFDM и SC-FDM разбиение ширины полосы пропускания системы осуществляют на множество ортогональных поднесущих, которые также называют тональными сигналами, двоичными сигналами и т.д. Каждая поднесущая может быть модулирована данными. В общем случае символы модуляции посылаются в частотной области с использованием OFDM и во временной области с использованием SC-FDM. Также могут быть использованы методики для систем беспроводной связи, где используется комбинация мультиплексированных схем, например, CDMA и OFDM или OFDM и SC-FDM и т.д. Для ясности конкретные аспекты методик описываются ниже для системы, где используется OFDM в прямой линии связи.
Система 100 может использовать структуру суперкадра для передач, посылаемых по прямой линии связи от базовых станций к терминалам. Структура суперкадра может быть определена различными способами и может включать в себя различные зоны.
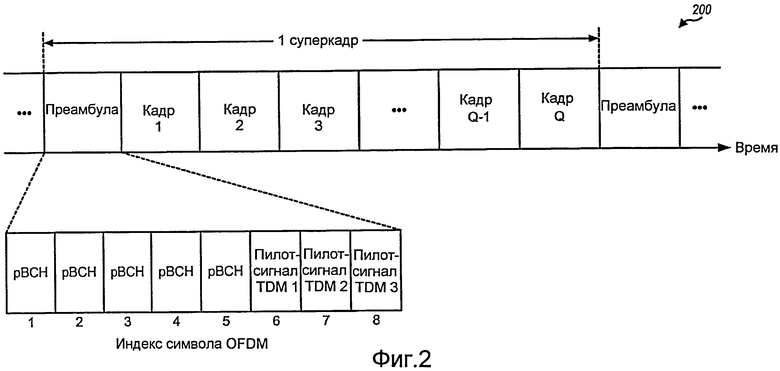
На фиг.2 показан образец структуры 200 суперкадра, которую можно использовать для прямой линии связи. В этом образце временная ось передачи разделена на блоки из суперкадров. Каждый интервал суперкадра имеет определенную длительность во времени, которая может быть фиксированной или конфигурируемой. Каждый суперкадр включает в себя преамбулу, за которой следует Q кадров, где в общем случае Q≥1, а в одном варианте Q=24. Преамбула несет пилот-сигналы и служебную информацию, которая позволяет терминалам получать данные передающей базовой станции, вести прием по каналам управления прямой линии связи, а затем иметь доступ к системе. Каждый кадр может нести данные графика и/или сигнализации и может иметь заранее определенную временную длительность интервала.
На фиг.2 также показан образец преамбулы. В этом образце преамбула имеет восемь символов OFDM, которым присвоены индексы от 1 до 8. Первые пять символов OFDM с индексами от 1 до 5 используют для одного или нескольких первичных вещательных каналов (рВСН). Каналы рВСН могут нести: (i) информацию для параметров конкретного применения, таких как общее количество поднесущих, количество защитных поднесущих, системное время и т.д., а также (ii) параметры конкретного сектора, такие как структура скачкообразной перестройки частоты, структура пилот-сигнала, структура каналов управления, количество передающих антенн и т.д. Последние три символа OFDM с индексами 6, 7 и 8 используют для пилот-сигналов TDM 1, 2 и 3 соответственно. Пилот-сигналы TDM могут нести информацию о секторе/системе и могут быть использованы для сбора данных терминалами, пытающимися получить доступ к системе. В образце, показанном на фиг.2, пилот-сигналы TDM посылаются периодически в преамбуле каждого суперкадра, причем каждый пилот-сигнал TDM посылается в одном периоде OFDM символа.
На фиг.2 показана особая структура суперкадра и особая структура преамбулы для прямой линии связи. Вообще, суперкадр может иметь дипазон любой временной длительности и может включать в себя любое количество кадров и других областей. Преамбула также может иметь дипазон любой временной длительности и включать в себя любое количество зон. Преамбула может включать в себя любое количество пилот-сигналов TDM, например два, три, четыре или иное количество пилот-сигналов TDM. Каждый пилот-сигнал TDM может иметь дипазон из любого количества периодов OFDM символа. Для ясности в последующем описании предполагается, что в преамбуле посылаются три пилот-сигнала TDM.
Пилот-сигналы TDM 1, 2 и 3 могут быть сформированы так, чтобы облегчить обмен данными терминалами. Терминал может использовать пилот-сигнал TDM 1 для обнаружения наличия преамбулы и получения грубой временной синхронизации и частоты. Терминал может использовать пилот-сигналы 1, 2 и/или 3 для получения информации о секторе/системе.
На фиг.3 показан образец пилот-сигналов TDM 1, 2 и 3 в частотной области. В этом образце пилот-сигнал TDM 1 посылается на каждой из N1 поднесущих, пилот-сигнал TDM 2 посылается на каждой из N2 поднесущих, а пилот-сигнал TDM 3 посылается на каждой из N3 поднесущих, где N1, N2 и N3 могут быть любыми целыми числами, большим или равным единице. Например, Np может быть равно двум для пилот-сигнала TDM р, где р ∈ {1, 2, 3}, и пилот-сигнал TDM р может посылаться на К/2 поднесущих с четными или нечетными индексами. На поднесущих, не используемых для пилот-сигнала TDM, могут посылаться нулевые символы с нулевыми значениями сигнала. Для данного пилот-сигнала TDM посылка символов пилот-сигналов на каждой из Np поднесущих в частотной области приводит к появлению Np копий пилот-сигнала TDM той же формы сигнала во временной области. Эта форма сигнала содержит Lp=K/Np отсчетов и может быть получена путем выполнения Lp-точечного быстрого преобразования Фурье (FFT) на Lp символах пилот-сигнала, посланных на Lp поднесущих, используемых для пилот-сигнала ТDМ.
В общем случае каждый пилот-сигнал TDM может посылаться на всех К поднесущих при Np=1 или на подмножестве из К поднесущих при Np>1. Пилот-сигналы TDM могут посылаться с одинаковым количеством поднесущих или с разным количеством поднесущих. Пилот-сигналы TDM могут также посылаться на одних и тех же поднесущих или на разных поднесущих.
В пилот-сигналах TDM может посылаться информация о секторе/системе. В общем случае информация о секторе/системе может содержать информацию любого типа, например информацию о конкретном секторе, системную информацию и т.д. Информация о конкретном секторе может включать в себя символ сектора (ID), идентифицирующий сектор, который посылает пилот-сигналы TDM; предпочтительный индекс несущей, указывающий несущую, предпочитаемую сектором и используемую для поддержки терминалов при переадресации вызова и т.д. Системная информация может включать в себя флаг режима, который указывает, в каком из режимов работает система: в синхронном режиме или в асинхронном режиме; длину циклического префикса; системное время и т.д. Информация о секторе/системе может быть использована для приема передач прямой линии связи, посылаемых сектором, а также для связи с сектором. Информация о секторе/системе может включать в себя М бит, где М в общем случае может быть любым целым числом, и в одном образце М=12.
Согласно одному аспекту информация о секторе/системе посылается в пилот-сигналах TDM, использующих иерархическую структуру пилот-сигнала. При иерархической структуре пилот-сигнала во множестве пилот-сигналов TDM может посылаться множество наборов бит для информации о секторе/системе, причем набор бит, посланный в данном пилот-сигнале TDM, может включать в себя биты, посланные в одном или нескольких предыдущих пилот-сигналах TDM. Иерархическая структура пилот-сигналов может уменьшить сложность сбора данных и повысить качество обнаружения для терминалов при допущении относительно большого количества бит, посылаемых для информации о секторе/системе. Ниже описывается несколько образцов иерархической структуры пилот-сигнала.
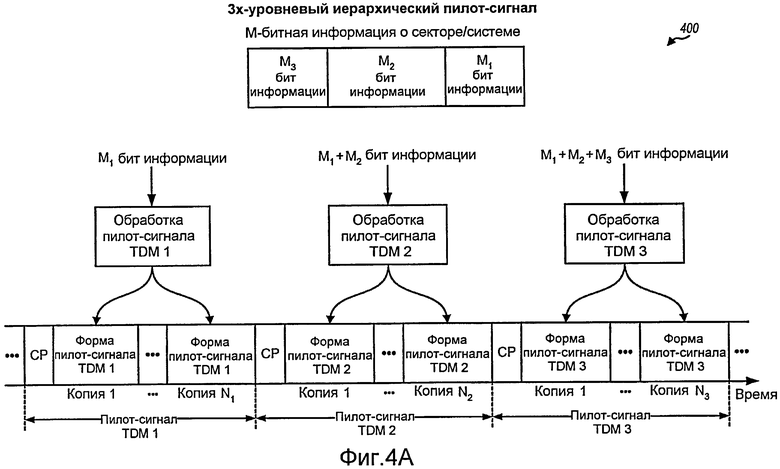
На фиг.4А показан образец 3-уровневой иерархической структуры 400 пилот-сигнала. В этом образце М бит информации о секторе/системе разделяется на M1 самых младших бит (LSB), М2 более старших бит и М3 самых старших бит (MSB), где М=М1+М2+М3. В общем случае каждое из чисел М, M1, M2 и М3 может быть любым целым числом. В одном образце М=12, M1=2, М2=6 и М3=4. Для М, M1, М2 и М3 могут также быть использованы другие значения.
M1 бит LSB информации о секторе/системе могут быть посланы в пилот-сигнале TDM 1. Например, M1 бит LSB могут быть использованы в качестве начального значения для генератора псевдослучайных чисел (PN), a PN последовательность от PN генератора может быть использована для создания символов пилот-сигнала для пилот-сигнала TDM 1. M1+M2 бит LSB информации о секторе/системе могут быть посланы в пилот-сигнале TDM 2, например, путем задания начального значения PN генератору M1+M2 бит LSB и использования результирующей PN последовательности для создания символов пилот-сигнала для пилот-сигнала TDM 2. В пилот-сигнале TDM 3 могут быть посланы все М бит информации о секторе/системе, например, путем задания начального значения PN генератору всех М бит и использования результирующей PN последовательности для создания символов пилот-сигнала для пилот-сигнала TDM 3. Таким образом, пилот-сигналы TDM 1, 2 и 3 могут быть «скремблированы» различными PN последовательностями, созданными с помощью различных частей информации о секторе/системе, где каждая часть может включать в себя некоторую или всю информацию о секторе/системе.
Пилот-сигнал TDM 1 может посылаться на каждой из N1 поднесущих, как показано на фиг.3. В данном случае для пилот-сигнала TDM 1 может быть послано N1 копий одной и той же формы сигнала. Перед первой копией формы сигнала может быть прикреплен циклический префикс (СР). Пилот-сигнал TDM 2 может посылаться на каждый из N2 поднесущих. В данном случае для пилот-сигнала TDM 2 может быть послано N2 копий одной и той же формы сигнала. Пилот-сигнал TDM 3 может посылаться на каждый из N3 поднесущих. В данном случае для пилот-сигнала TDM 3 может быть послано N3 копий одной и той же формы сигнала. Каждая форма сигнала может быть особой последовательностью комплекснозначных образцов.
В одном образце при М=12 пилот-сигнал TDM 1 может скремблироваться M1=2 битами информации и может принимать четыре возможных значения, пилот-сигнал TDM 2 может скремблироваться M1+M2=8 битами информации и может принимать 256 возможных значений, а пилот-сигнал TDM 3 может скремблироваться М=12 битами информации и может принимать 4096 возможных значений. Терминал может обработать пилот-сигнал TDM 1 и обнаружить для одного из четырех возможных значений для пилот-сигнала TDM 1. Затем терминал может обработать пилот-сигнал TDM 2 и обнаружить для одного из 64 возможных значений, связанных с обнаруженным значением V1 для пилот-сигнала TDM 1. Затем терминал может обработать пилот-сигнал TDM 3 и обнаружить для одного из 16 возможных значений, связанных с обнаруженными значениями V1 и V2 для пилот-сигналов TDM 1 и 2 соответственно. Выполняя обмен данными в три этапа, терминал может обнаружить для одного из 4096 возможных значений для 12-битовой информации о секторе/системе путем сравнения только 84 гипотез, которые включают в себя 4 гипотезы для пилот-сигнала TDM 1, 64 гипотезы для пилот-сигнала TDM 2 и 16 гипотез для пилот-сигнала TDM 3. Сложность обмена данными может быть значительно уменьшена для иерархической структуры пилот-сигнала.
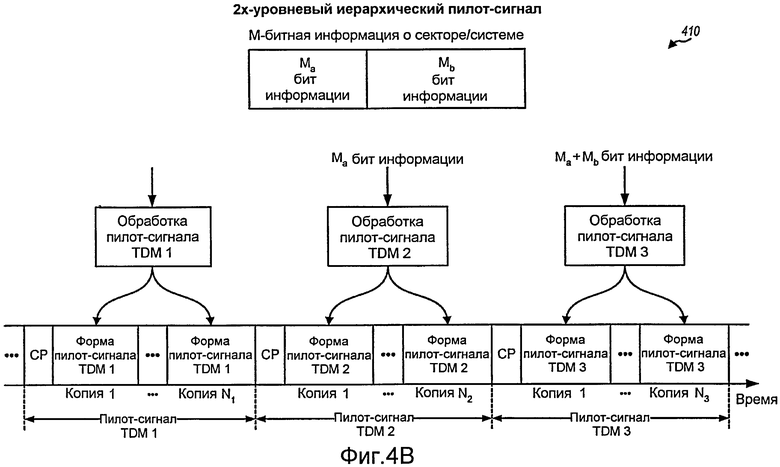
На фиг.4В показан образец 2-уровневой иерархической структуры 410 пилот-сигналов. В этом образце М бит информации о секторе/системе разделяются на Ма бит MSB и Mb бит LSB, где М=Ма+Mb. В общем случае М, Ма и Mb может быть любым целым числом. Пилот-сигнал TDM 1 может посылаться без какой-либо информации о секторе/системе и может быть общим для всех секторов в системе. Ма бит MSB информации о секторе/системе могут посылаться в пилот-сигнале TDM 2, например, путем задания начального значения PN генератору Ма бит MSB и использования результирующей PN последовательности для создания символов пилот-сигнала для пилот-сигнала TDM 2. В пилот-сигнале TDM 3 могут посылаться все М бит информации о секторе/системе, например, путем задания начального значения PN генератору всех М бит и использования результирующей PN последовательности для создания символов пилот-сигнала для пилот-сигнала TDM 3.
Терминал может обработать пилот-сигнал TDM 1 для обнаружения преамбулы и получения грубой временной синхронизации и частоты. Затем терминал может обработать пилот-сигнал TDM 2 и обнаружить для одного из  возможных значений для пилот-сигнала TDM 2. После этого терминал может обработать пилот-сигнал TDM 3 и обнаружить для одного из
возможных значений для пилот-сигнала TDM 2. После этого терминал может обработать пилот-сигнал TDM 3 и обнаружить для одного из  возможных значений, связанных с обнаруженным значением Va для пилот-сигнала TDM 2. Выполняя обмен данными в два этапа, терминал может обнаружить одно из
возможных значений, связанных с обнаруженным значением Va для пилот-сигнала TDM 2. Выполняя обмен данными в два этапа, терминал может обнаружить одно из  возможных значений для информации о секторе/системе путем сравнения только
возможных значений для информации о секторе/системе путем сравнения только  гипотез.
гипотез.
В образцах иерархических пилот-сигналов, показанных на фигурах 4А и 4В, каждый пилот-сигнал TDM, в который встроена информация о секторе/системе, несет: (i) все информационные биты, посланные в предыдущих пилот-сигналах TDM, если это имеет место, и (ii) дополнительные информационные биты, которые не посылались в предыдущих пилот-сигналах TDM. В другом образце M1 бит посылаются в пилот-сигнале TDM 1, M2 бит посылаются в пилот-сигнале TDM 2, а в пилот-сигнале TDM 3 посылаются все М бит. Еще в одном образце в пилот-сигнале TDM 1 посылается M1 бит, в пилот-сигнале TDM 2 посылаются M1 и M2 бит, а в пилот-сигнале TDM 3 посылается М2 и М3 бит. Также возможны и различные иные образцы иерархических пилот-сигналов. В общем случае для иерархического пилот-сигнала по меньшей мере один бит информации о секторе/системе посылается во множестве пилот-сигналов TDM, и по меньшей мере один пилот-сигнал TDM несет по меньшей мере один бит, посланный в предыдущем пилот-сигнале TDM.
Иерархический пилот-сигнал может повысить качество обнаружения благодаря уменьшению вероятности ложной тревоги. Например, в образце, показанном на фиг.4А, помехообразующий сектор может иметь те же самые M2 биты, что и желаемый сектор, но может иметь и другие M1 биты. В этом случае помехообразующий сектор может быть исключен, поскольку в пилот-сигнале TDM 2 посылается M1 и М2 бит, и только желаемый сектор соответствует и M1, и М2 битам, в то время как помехообразующий сектор соответствует M2 битам, но не соответствует M1 битам.
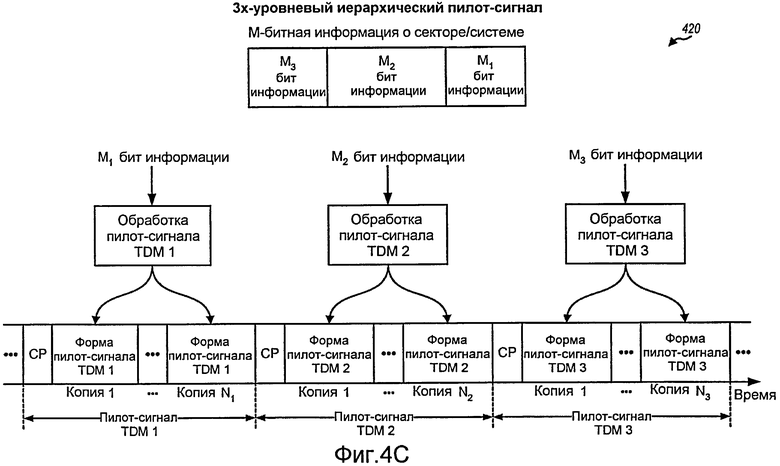
Информация о секторе/системе также может посылаться в не иерархической структуре пилот-сигнала. Для не иерархической структуры пилот-сигнала каждый бит информации о секторе/системе посылается только в одном пилот-сигнале TDM. Таким образом, пилот-сигналы TDM несут не перекрывающиеся наборы бит для информации о секторе/системе.
На фиг.4С показан образец 3-уровневой не иерархической структуры 420 пилот-сигнала. В этом образце M1 бит LSB информации о секторе/системе могут посылаться в пилот-сигнале TDM 1. М2 более старших бит информации о секторе/системе могут посылаться в пилот-сигнале TDM 2. М3 бит MSB информации о секторе/системе могут посылаться в пилот-сигнале TDM 3.
На фиг.4А, 4В и 4С показаны некоторые примерные образцы иерархических и не иерархических структур пилот-сигнала. Можно также определить и другие структуры пилот-сигнала. В общем случае структура пилот-сигнала может включать в себя любое количество уровней, и в каждом пилот-сигнале TDM может посылаться любой набор бит для информации о секторе/системе.
В вышеописанных схемах для создания PN последовательности можно использовать некоторые или все биты информации о секторе/системе, которую затем можно использовать для создания символов пилот-сигнала для пилот-сигнала TDM. Информация о секторе/системе может также посылаться в пилот-сигналах TDM другим образом. В общем случае возможно окажется желательным посылать информацию о секторе/системе так, чтобы пилот-сигналы TDM для каждого сектора появлялись случайным образом в других секторах. Это помогает рандомизировать межсекторные помехи, что может повысить качество обнаружения.
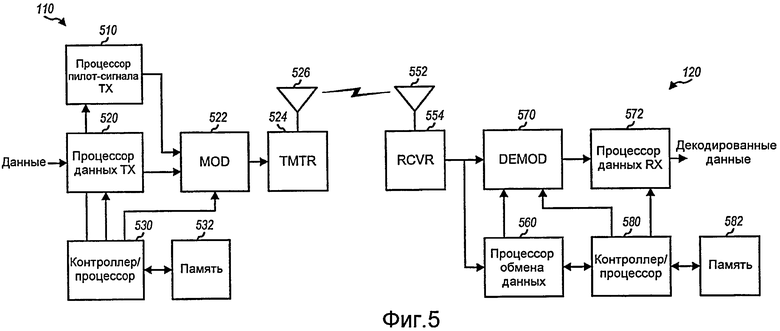
На фиг.5 показана блок-схема образца базовой станции 110 и терминала 120, которые могут представлять одну из базовых станций и один из терминалов на фиг.1. Для простоты на фиг.5 показаны только обрабатывающие блоки для передач по прямой линии связи. Также для простоты базовая станция 110 и терминал 120 оборудованы каждый одной антенной.
На базовой станции 110 процессор 510 пилот-сигнала создает символы пилот-сигнала для пилот-сигналов TDM на основе информации о секторе/системе. Используемый здесь символ пилот-сигнала является символом для пилот-сигнала, символ данных является символом для данных, нулевой символ является символом со значением сигнала, равным нулю, и, как правило, символ является комплексным числом. Символы данных и пилот-сигнала могут являться символами модуляции из таких схем модуляции, как фазовая манипуляция (PSK), квадратурная амплитудная модуляция (QAM) и т.д. Пилот-сигнал, как правило, представляет собой данные, которые априори известны как передатчику, так и приемнику. Однако в символы пилот-сигнала может быть встроена информация о секторе/системе, которая априори не известна приемнику. Процессор 520 данных принимает данные графика и данные сигнализации, обрабатывает принятые данные и создает символы данных. Модулятор (MOD) 522 выполняет модуляцию в данных и символах пилот-сигнала (например, для OFDM) и создает выходные отсчеты. Передатчик (TMTR) 524 обрабатывает (например, конвертирует в аналоговую форму, усиливает, фильтрует и преобразует с повышением частоты) выходные отсчеты и создает сигнал прямой линии связи, который передается через антенну 526.
В терминале 120 антенна 552 принимает сигнал прямой линии связи от базовой станции 110 и подает принятый сигнал в приемник (RCVR) 554. Приемник 554 обрабатывает (например, фильтрует, усиливает, преобразует с понижением частоты и оцифровывает) принятый сигнал и создает принятые отсчеты. Процессор 560 обмена данных выполняет обмен данными на основе пилот-сигналов TDM и предоставляет информацию о временной синхронизации, частоте и секторе/системе. Демодулятор (DEMOD) 570 выполняет демодуляцию принятых отсчетов (например, для OFDM), чтобы получить оценки символа данных. Процессор 572 принятых данных (RX) обрабатывает оценки символа данных способом, представляющим собой дополнение к обработке, выполняемой процессором 520 данных ТХ, и предоставляет декодированные данные.
Контроллеры 530 и 580 управляют работой базовой станции 110 и терминала 120 соответственно. В запоминающих устройствах 532 и 582 хранятся программные коды и данные для базовой станции 110 и терминала 10 соответственно.
На фиг.6 показана блок-схема образца процессора 510 пилот-сигнала ТХ и модулятора 522 на базовой станции 110 по фиг.5. В процессоре 510 блок 612 принимает информацию о секторе/системе для сектора, а также индекс пилот-сигнала TDM, который указывает, какой из пилот-сигналов TDM (1, 2 или 3) посылается. В одном образце блок 612 предоставляет информацию о секторе/системе непосредственно. В этом образце пилот-сигналы TDM являются статичными и не изменяются от одного суперкадра к другому суперкадру. В другом образце блок 612 изменяет информацию о секторе/системе на основе системного времени, например индексе суперкадра. В этом образце пилот-сигналы TDM изменяются от одного суперкадра к другому суперкадру, что может рандомизировать помехи из-за пилот-сигналов TDM. Для этого образца терминал в данном секторе у может наблюдать рандомизированные помехи из-за пилот-сигналов TDM из других секторов. Это позволяет терминалу выполнять корреляцию для пилот-сигналов TDM из сектора y с более чем одним суперкадром, чтобы обнаружить слабую преамбулу из сектора y.
В любом случае блок 612 предоставляет Мр бит информации о секторе/системе для пилот-сигнала TDM р, где р ∈ {1, 2, 3} и 0≤Мр≤М. В образце, показанном на фиг.4А, блок 612 предоставляет M1 бит LSB информации о секторе/системе для пилот-сигнала TDM 1, M1+M2 бит LSB информации о секторе/системе для пилот-сигнала TDM 2 и все М бит информации о секторе/системе для пилот-сигнала TDM 3. Для образца, показанного на фиг.4В, блок 612 предоставляет нулевые биты для пилот-сигнала TDM 1, Ма бит MSB информации о секторе/системе для пилот-сигнала TDM 2 и все М бит информации о секторе/системе для пилот-сигнала TDM 3. В других образцах блок 612 может предоставить другие наборы информационных бит для пилот-сигналов TDM.
PN генератор 614 создает PN последовательность для пилот-сигнала TDM p на основе Мр бит информации, принятых от блока 612. Скремблер 616 создает символы пилот-сигнала для пилот-сигнала TDM р на основе PN последовательности, принятой от PN генератора 614. Скремблер 616 может сформировать группы из В бит на основе бит в PN последовательности, отобразить каждую группу из В бит для символа модуляции в схеме модуляции и обеспечить символы модуляции для групп из В бит в виде символов пилот-сигнала для пилот-сигнала TDM р. В может быть равно 1 для двоичной фазовой манипуляции (BPSK), 2 для квадратурной фазовой манипуляции (QPSK) и т.д. Скремблер 616 может также скремблировать известные символы модуляции с помощью PN последовательности для создания символов пилот-сигнала. Устройство 618 отображения символа на поднесущую отображает символы пилот-сигнала для пилот-сигнала TDM р на поднесущие, используемые для пилот-сигнала TDM р, и отображает нулевые символы на остальные поднесущие и обеспечивает модулятор 522 К выходными символами для всех К поднесущих.
В модуляторе 522 мультиплексор (Mux) 622 принимает выходные символы от процессора 510 пилот-сигналов ТХ и процессора 520 данных ТХ, предоставляет выходные символы от процессора 510 на интервалах пилот-сигнала TDM и предоставляет выходные символы от процессора 520 на других интервалах. В каждом периоде символа OFDM блок IFFT 624 выполняет К-точечное преобразование IFFT на К выходных символах для всех К поднесущих, чтобы получить К отсчетов во временной области. К отсчетов могут включать в себя множество копий формы сигнала, если символы пилот-сигнала отображаются на равноотстоящие поднесущие, например, как показано на фиг.3, 4А, 4В и 4С. Блок 626 прикрепляет к К отсчетам циклический префикс путем копирования последних С отсчетов и прикрепления этих С скопированных отсчетов спереди к К отсчетам, где С является длиной циклического префикса.
Терминал 120 может выполнять обмен данных на основе пилот-сигналов TDM различными способами. Отсчеты, принятые от приемника 554, можно представить в виде

где xi - отсчет, посланный базовой станцией 110 в периоде отсчета i, ri - отсчет, принятый терминалом 120 в периоде отсчета i, a ni - шум в периоде отсчета i.
Для пилот-сигнала TDM 1 может быть послано множество копий одной и той же формы сигнала, например, как показано на фиг.4А и 4В. В этом случае терминал 110 может выполнять задержанную корреляцию для обнаружения пилот-сигнала TDM 1 следующим образом:

где Ci - результирующая задержанная корреляция для периода отсчета i, L1 - длина формы сигнала для пилот-сигнала TDM 1, a "*" обозначает комплексно сопряженную величину.
Задержанная корреляция в уравнении (2) устраняет воздействие беспроводного канала без необходимости в оценке канала и, дополнительно, когерентно комбинирует принятую энергию по длине сигнала для пилот-сигнала TDM 1. Для получения результирующей задержанной корреляции Ci для каждого периода отсчета i может быть выполнена скользящая задержанная корреляция. Для обнаружения пилот-сигнала TDM 1 Ci можно сравнить с порогом Cth. Например, пилот-сигнал TDM 1 может быть объявлен, если Ci превышает Cth и остается большим, чем Cth на заранее определенное процентное соотношение L1. В качестве грубой временной синхронизации, указывающей позицию пилот-сигнала TDM 1, может быть принят период отсчета, который дает максимальное значение Ci.
Грубую оценку Δf частотной ошибки можно получить следующим образом:

где Tотсчет - период одного отсчета. Число  дает фазовый сдвиг между отсчетом
дает фазовый сдвиг между отсчетом  и отсчетом ri-j, который поступает позднее на L1 периодов отсчета. Суммирование в уравнении (3) дает усредненный фазовый сдвиг по L1 периодам отсчета. Деление на 2π·L1·Tотсчет обеспечивает оценку частотной ошибки по отсчету в размерности радиан.
и отсчетом ri-j, который поступает позднее на L1 периодов отсчета. Суммирование в уравнении (3) дает усредненный фазовый сдвиг по L1 периодам отсчета. Деление на 2π·L1·Tотсчет обеспечивает оценку частотной ошибки по отсчету в размерности радиан.
Оценку Δf частотной ошибки можно использовать для настройки частоты сигнала гетеродина (LO), используемого приемником 554 для преобразования с понижением частоты. Принятые от приемника 554 отсчеты можно также циклически сдвинуть на Δf для устранения частотной ошибки. Частотную ошибку можно также устранить другими способами.
После получения грубой временной синхронизации может быть захвачен первый пилот-сигнал, несущий информацию о секторе/систем, для получения по меньшей мере одной копии формы сигнала для данного пилот-сигнала TDM. Этот первый пилот-сигнал TDM является пилот-сигналом TDM 1 для образца, показанного на фиг.4А, и является пилот-сигналом TDM 2 для образца, показанного на фиг.4В. Обнаруживаемый пилот-сигнал TDM в дальнейшем описании называют пилот-сигналом TDM р, где р ∈ {1, 2, 3}. Пилот-сигнал TDM р содержит Np копий одинаковой формы сигнала, а форма сигнала содержит Lp отсчетов. До Np копий формы сигнала может быть захвачено и обработано для обнаружения бит информации, посланных в пилот-сигнале TDM р. Например, если пилот-сигнал TDM р содержит две копии формы сигнала, то пилот-сигнал TDM р может быть дискретизирован примерно на j периода символа OFDM от обнаруженной границы символа OFDM и за 1/2 периода символа OFDM для получения К/2 захваченных отсчетов для одной полной копии формы сигнала. Для простоты в последующем описании предполагается, что захватывается и обрабатывается одна копия формы сигнала для пилот-сигнала TDM р.
Оценку σ2 шума можно получить на основе Lp захваченных отсчетов для пилот-сигнала TDM p следующим образом:

где rj - захваченный j-й отсчет для пилот-сигнала TDM р. В пилот-сигнале TDM p может быть послано Мр бит информации о секторе/системе. Для определения значения Мр бит, посланных в пилот-сигнале TDM p, может быть рассчитана метрика решения для каждого из возможных значений, которые возможно посланы в пилот-сигнале TDM р. В качестве значения, посланного в пилот-сигнале TDM p, может быть объявлено значение с метрикой наилучшего решения. Обнаружение переданного значения может быть выполнено различным образом.
В одном образце Lp захваченных отсчетов могут быть преобразованы в частотной области с помощью FFT для получения Lp принятых символов. Для каждой гипотезы, соответствующей разному гипотетическому значению m, посланному в пилот-сигнале TDM p, где  , для первого обнаруживаемого пилот-сигнала TDM, может быть создана PN последовательность для гипотетического значения m. Lp принятых символов могут быть дескремблированы с помощью PN последовательности, и Lp дескремблированных символов могут быть преобразованы обратно во временную область с помощью IFFT, для получения Lp дескремблированных отсчетов. Метрика Em обнаружения может быть рассчитана для гипотетического значения m следующим образом:
, для первого обнаруживаемого пилот-сигнала TDM, может быть создана PN последовательность для гипотетического значения m. Lp принятых символов могут быть дескремблированы с помощью PN последовательности, и Lp дескремблированных символов могут быть преобразованы обратно во временную область с помощью IFFT, для получения Lp дескремблированных отсчетов. Метрика Em обнаружения может быть рассчитана для гипотетического значения m следующим образом:
 или
или

где Cj,m - j-й дескремблированный отсчет для гипотетического значения m, a η - заранее заданный коэффициент.
Метрику обнаружения можно рассчитать для каждого из  возможных значений, которые возможно посланы в пилот-сигнале TDM p.
возможных значений, которые возможно посланы в пилот-сигнале TDM p.  метрик обнаружения можно обозначить как Em, где m=0, 1, …,
метрик обнаружения можно обозначить как Em, где m=0, 1, …,  Гипотетическое значение с наибольшей метрикой обнаружения может быть объявлено как обнаруженное значение Vp, которое имеет значение, предполагаемое для посылки для Мр бит, переносимых в пилот-сигнале TDM р.
Гипотетическое значение с наибольшей метрикой обнаружения может быть объявлено как обнаруженное значение Vp, которое имеет значение, предполагаемое для посылки для Мр бит, переносимых в пилот-сигнале TDM р.
Вышеописанное обнаружение может быть повторено для каждого последующего пилот-сигнала TDM, несущего некоторую часть или всю информацию о секторе/системе. Для каждого пилот-сигнала TDM обнаруженные значения из всех ранее обнаруженных пилот-сигналов TDM можно использовать для формирования всех возможных значений для бит, посланных в пилот-сигнале TDM.
Для образца, показанного на фиг.4А, обнаруженное значение V1 для M1 информационных бит, посланных в пилот-сигнале TDM 1, можно использовать для формирования  возможных (М1+М2)-бит значений, которые возможно были посланы в пилот-сигнале TDM 2. Каждое возможное значение для пилот-сигнала TDM 2 состоит из обнаруженного значения V1 для пилот-сигнала TDM 1 и гипотетического значения m для М2 новых бит, посланных в пилот-сигнале TDM 2, где
возможных (М1+М2)-бит значений, которые возможно были посланы в пилот-сигнале TDM 2. Каждое возможное значение для пилот-сигнала TDM 2 состоит из обнаруженного значения V1 для пилот-сигнала TDM 1 и гипотетического значения m для М2 новых бит, посланных в пилот-сигнале TDM 2, где  Аналогичным образом, обнаруженное значение V1 для M1 бит информации, посланных в пилот-сигнале TDM 1, и обнаруженное значение V2 для М2 бит информации, посланных в пилот-сигнале TDM 2, можно использовать для формирования
Аналогичным образом, обнаруженное значение V1 для M1 бит информации, посланных в пилот-сигнале TDM 1, и обнаруженное значение V2 для М2 бит информации, посланных в пилот-сигнале TDM 2, можно использовать для формирования  возможных М-бит значений, которые, возможно, были посланы в пилот-сигнале TDM 3. Каждое возможное значение для пилот-сигнала TDM 3 состоит из обнаруженного значения V1 для пилот-сигнала TDM 1, обнаруженного значения V2 для пилот-сигнала TDM 2 и гипотетического значения m для М3 новых бит, посланных в пилот-сигнале TDM 3, где
возможных М-бит значений, которые, возможно, были посланы в пилот-сигнале TDM 3. Каждое возможное значение для пилот-сигнала TDM 3 состоит из обнаруженного значения V1 для пилот-сигнала TDM 1, обнаруженного значения V2 для пилот-сигнала TDM 2 и гипотетического значения m для М3 новых бит, посланных в пилот-сигнале TDM 3, где 
Для образца, показанного на фиг.4В, обнаруженное значение Va для Ма бит информации, посланных в пилот-сигнале 2, можно использовать для формирования  возможных М-бит значений, которые возможно были посланы в пилот-сигнале TDM 3. Каждое возможное значение для пилот-сигнала TDM 3 состоит из обнаруженного значения Va для пилот-сигнала TDM 2 и гипотетического значения m для Mb новых бит, посланных в пилот-сигнале TDM 3, где
возможных М-бит значений, которые возможно были посланы в пилот-сигнале TDM 3. Каждое возможное значение для пилот-сигнала TDM 3 состоит из обнаруженного значения Va для пилот-сигнала TDM 2 и гипотетического значения m для Mb новых бит, посланных в пилот-сигнале TDM 3, где 
Для каждого пилот-сигнала TDM p можно рассчитать метрики обнаружения для всех возможных значений для пилот-сигнала TDM p, например, как показано в уравнениях (4) и (5). В качестве обнаруженного значения для пилот-сигнала TDM p можно объявить гипотетическое значение с максимальной метрикой обнаружения.
На фиг.7 показана блок-схема процессора 560 обмена данных в терминале 120 на фиг.5. В процессоре 560 задерживающий коррелятор 712 получает отсчеты, принятые от приемника 554, и выполняет скользящую задержанную корреляцию, например, как показано в уравнении (2). Детектор 714 пилот-сигнала TDM принимает результаты Ci корреляции от задерживающего коррелятора 712 и обнаруживает пилот-сигнал TDM 1.
После обнаружения пилот-сигнала TDM 1 детектор 714 определяет грубую временную синхронизацию и оценку частотной ошибки Δf по принятым отсчетам, являющимся результатом при обнаружении пилот-сигнала TDM 1.
Поворотное устройство 722 циклически сдвигает принятые отсчеты на основе оценки Δf частотной ошибки и предусматривает циклически сдвинутые отсчеты, в которых устранена частотная ошибка. Для каждого пилот-сигнала TDM, несущего информацию о секторе/системе, блок 724 может захватить отсчеты для одной или нескольких копий формы сигнала для данного пилот-сигнала TDM на основе грубой временной синхронизации, от детектора 714. Блок 726 получает оценку шума для захваченных отсчетов, например, как показано в уравнении (4). Блок FFT 728 выполняет преобразование FFT в захваченных отсчетах и обеспечивает принятые символы. PN генератор 730 создает PN последовательность для каждого возможного значения, которые были, возможно, посланы в обнаруживаемом пилот-сигнале TDM. PN последовательности для обнаруживаемого в данный момент пилот-сигнала TDM могут зависеть от обнаруженных значений для пилот-сигналов TDM, обнаруженных ранее, если это имеет место. Для каждого гипотетического значения m дескремблер 732 дескремблирует принятые символы с помощью соответствующей PN последовательности и обеспечивает дескремблированные символы. Дескремблер 732 по существу устраняет модуляцию в принятых символах с помощью PN последовательности. Дескремблированные символы содержат главным образом шум, если локально созданная PN-последовательность не является PN последовательностью, посланной в обнаруживаемом пилот-сигнале TDM. Блок IFFT 734 выполняет преобразование IFFT в дескремблированных символах и обеспечивает дескремблированные отсчеты Cj,m.
Блок 736 вычисляет метрику Em обнаружения для каждого гипотетического значения m на основе дескремблированных отсчетов и оценки шума, например, как показано в уравнении (5). Детектор 738 принимает метрики Em обнаружения для всех возможных значений, которые возможно были посланы в обнаруживаемом пилот-сигнале TDM. Детектор 738 идентифицирует гипотетическое значение с помощью наибольшей метрики обнаружения и предоставляет это значение в качестве обнаруженного значения Vp для обнаруживаемого пилот-сигнала TDM. PN генератор 730 может принять обнаруженное значение Vp от детектора 738 и использовать это значение для создания PN последовательностей для следующего пилот-сигнала TDM, подлежащего обнаружению. После обнаружения всех пилот-сигналов TDM детектор 738 в качестве восстановленной информации о секторе/системе предоставляет конечное обнаруженное значение.
На фиг.7 показан один образец выполнения обнаружения для пилот-сигналов TDM. В другом образце захваченные отсчеты для данного пилот-сигнала TDM коррелируются с каждой возможной формой сигнала, которая возможно была послана для пилот-сигнала TDM. На основе разных гипотетических значений для пилот-сигнала TDM могут быть созданы различные формы сигнала. В качестве обнаруженного значения для пилот-сигнала TDM может быть предусмотрено гипотетическое значение с наибольшим результатом корреляции. Обнаружение для пилот-сигналов TDM также может выполняться другими способами.
После обнаружения всех пилот-сигналов TDM один или несколько пилот-сигналов TDM можно использовать для получения уточненной временной синхронизации и/или уточненной оценки частотной ошибки. Символы OFDM могут приниматься и обрабатываться на основе уточненной временной синхронизации и/или уточненной оценки частотной ошибки.
На фиг.8 показан образец процесса 800, выполняемого базовой станцией для посылки пилот-сигналов TDM. На основе различных наборов бит для информации, посылаемой во множестве пилот-сигналов, может быть создано множество пилот-сигналов, причем каждый набор включает в себя некоторые или все биты посылаемой информации (блок 812). Посылаемая информация может содержать информацию о конкретном секторе, системную информацию и т.д. Множество пилот-сигналов может быть послано в последовательном порядке во множестве временных интервалов (блок 814).
Для иерархической структуры пилот-сигналов множество пилот-сигналов может нести перекрывающиеся наборы бит, например, как показано на фиг.4А и 4В. Набор бит, посланный в каждом пилот-сигнале, может содержать биты, посланные в пилот-сигналах, переданных ранее, если это имеет место, и дополнительные, ранее не посланные биты. Для 2-уровневой иерархической структуры пилот-сигнала первый пилот-сигнал может быть создан на основе некоторых из бит для информации, а второй пилот-сигнал может быть создан на основе всех бит для информации. Для 3-уровневой иерархической структуры пилот-сигнала первый пилот-сигнал может быть создан на основе первого набора бит, второй пилот-сигнал может быть создан на основе второго набора бит, который может содержать первый набор, а третий пилот-сигнал может быть создан на основе всех бит для информации. Для не иерархической структуры пилот-сигнала множество пилот-сигналов могут нести неперекрывающиеся наборы бит для информации, например, как показано на фиг.4С.
Для каждого пилот-сигнала PN последовательность может быть создана на основе набора бит, посылаемых в этом пилот-сигнале. Символы пилот-сигнала могут быть созданы на основе PN последовательности и отображены на поднесущие, используемые для пилот-сигнала. Отображенные символы пилот-сигнала можно преобразовать для получения последовательности отсчетов для пилот-сигнала. Данный пилот-сигнал может содержать одну или множество копий формы сигнала.
На фиг.9 показан образец прибора 900 для посылки пилот-сигналов TDM. Прибор 900 включает в себя средство для создания множества пилот-сигналов на основе различных наборов бит для информации, посылаемых во множестве пилот-сигналов, причем каждый набор включает в себя некоторые либо все биты посылаемой информации (модуль 912), и средство для посылки множества пилот-сигналов в последовательном порядке во множестве временных интервалов (модуль 914).
На фиг.10 показан образец процесса 1000, выполняемого терминалом для приема пилот-сигналов TDM. Множество пилот-сигналов может быть принято во множестве временных интервалов (блок 1012). Множество пилот-сигналов может нести различные наборы бит для информации, посланных в пилот-сигналах, причем каждый набор включает в себя некоторые или все биты информации. Обнаружение может выполняться для восстановления набора бит, посланных в каждом из множества пилот-сигналов (блок 1014).
Для иерархической структуры пилот-сигнала обнаружение для каждого пилот-сигнала может выполняться на основе обнаруженных значений для ранее обнаруженных пилот-сигналов, если это имело место, чтобы получить обнаруженное значение для набора бит, посланных в обнаруживаемом пилот-сигнале. Для 2-уровневой иерархической структуры пилот-сигнала можно выполнить обнаружение первого пилот-сигнала для получения первого обнаруженного значения для первого набора бит, посланных в первом пилот-сигнале. Обнаружение для второго пилот-сигнала может выполняться на основе первого обнаруженного значения для получения второго обнаруженного значения для всех бит информации. Для 3-уровневой иерархической структуры пилот-сигнала можно выполнить обнаружение первого пилот-сигнала для получения первого обнаруженного значения для первого набора бит, посланных в первом пилот-сигнале. Обнаружение второго пилот-сигнала может выполняться на основе первого обнаруженного значения для получения второго обнаруженного значения для второго набора бит, посланных во втором пилот-сигнале, где второй набор может содержать первый набор. Обнаружение третьего пилот-сигнала может быть выполнено на основе первого и второго обнаруженных значений для получения третьего обнаруженного значения для всех бит информации. Для не иерархической структуры пилот-сигнала обнаружение можно выполнять независимо для каждого пилот-сигнала для получения обнаруженного значения для набора бит, посланных в этом пилот-сигнале.
Для каждого пилот-сигнала может быть определена метрика обнаружения для каждого из множества гипотетических значений для этого пилот-сигнала. Гипотетическое значение, связанное с наибольшей метрикой обнаружения, может быть обеспечено обнаруженным значением для набора бит, посланных в данном пилот-сигнале. Каждое гипотетическое значение для обнаруживаемого пилот-сигнала может содержать: (i) первую часть для обнаруженных значений ранее обнаруженных пилот-сигналов, если это имело место; и (ii) вторую часть для неизвестного значения для дополнительных бит, посланных в обнаруживаемом пилот-сигнале.
В одном образце оценку шума можно получить на основе захваченных отсчетов для обнаруживаемого пилот-сигнала. Для множества гипотетических значений для пилот-сигнала может быть создано множество PN последовательностей. Захваченные отсчеты можно дескремблировать на основе множества PN последовательностей (например, во временной области или в частотной области), чтобы получить множество последовательностей дескремблированных отсчетов. Для дескремблирования в частотной области захваченные отсчеты можно преобразовать для частотной области, чтобы получить принятые символы. Модуляцию в принятых символах можно устранить на основе PN последовательности для каждого гипотетического значения, чтобы получить дескремблированные символы для этого гипотетического значения. Дескремблированные символы для каждого гипотетического значения можно преобразовать обратно во временную область, чтобы получить последовательность дескремблированных отсчетов для данного гипотетического значения. Для множества гипотетических значений можно получить множество метрик обнаружения на основе множества последовательностей дескремблированных отсчетов и оценки шума. Например, можно рассчитать энергию каждого дескремблированного отсчета. Затем на основе энергий для последовательности дескремблированных отсчетов и оценки шума можно рассчитать метрику обнаружения для каждого гипотетического значения, например, как показано в уравнении (5).
На фиг.11 показан образец прибора 1100 для приема пилот-сигналов TDM. Прибор 1100 включает в себя средство для приема множества пилот-сигналов во множестве временных интервалов, где множество пилот-сигналов несет различные наборы бит для информации, посланных в пилот-сигналах, и где каждый набор включает в себя некоторые или все биты информации (модуль 1112), и средство для выполнения обнаружения для восстановления набора бит, посланных в каждом из множества пилот-сигналов (модуль 1114).
Модули 912 и 914 на фиг.9 и модули 1112 и 1114 на фиг.11 могут содержать процессоры, электронные устройства, аппаратные средства, электронные компоненты, логические схемы, запоминающие устройства и т.д. либо любую их комбинацию.
Описанные здесь методики могут быть реализованы различными средствами. Эти методики могут быть реализованы, например, аппаратными средствами, программно-аппаратными средствами, программными средствами или их комбинацией. Для аппаратной реализации обрабатывающие блоки в данном объекте (например, базовая станция или терминал) могут быть реализованы в одной или нескольких прикладных специализированных интегральных схемах (ASIC), цифровых процессорах сигналов (DSP), устройствах обработки цифровых сигналов (DSPD), программируемых логических устройствах (PLD), программируемых логических вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, электронных устройствах, иных электронных блоках, разработанных для выполнения вышеописанных функций, компьютере или их комбинации.
Для программно-аппаратной и/или программной реализации методики могут быть реализованы с помощью модулей (например, процедуры, функции и т.д.), которые выполняют вышеописанные функции. Программно-аппаратные и/или программные команды могут храниться в памяти (например, память 532 или 582 на фиг.5) и выполняться процессором (например, процессор 530 или 580). Память может быть реализована в процессоре или вне процессора. Программно-аппаратные и/или программные команды могут также храниться на ином, читаемом процессором носителе, например оперативная память (RAM), постоянная память (ROM), долговременная оперативная память (NVRAM), программируемая постоянная память (PROM), электрически стираемая память PROM (EEPROM), флэш-память, компакт-диск (CD), магнитное или оптическое запоминающее устройство для данных и т.д.
Приведенное выше описание изобретения предложено для того, чтобы дать возможность специалисту в данной области техники выполнить или использовать данное изобретение. Специалисты в данной области техники без труда предложат различные модификации этого изобретения, а определенные здесь основополагающие принципы могут быть применены к другим вариантам, не выходящим за рамки существа или объема изобретения. Таким образом, здесь не предполагается, что изобретение ограничивается описанными здесь примерами и образцами, а соответствует самому широкому объему, согласующемуся с раскрытыми здесь принципами и новыми признаками.
Изобретение относится к области связи. Описаны методики посылки информации о секторе/системе в пилот-сигналах TDM, использующих иерархическую структуру пилот-сигнала. Базовая станция посылает множество наборов бит для информации о секторе/системе во множестве пилот-сигналов TDM. Набор бит, посланный в данном пилот-сигнале TDM, может включать в себя биты, посланные в предыдущих пилот-сигналах TDM. В одном образце базовая станция создает первый пилот-сигнал TDM на основе первого набора бит, создает второй пилот-сигнал TDM на основе второго набора бит, который включает в себя первый набор, создает третий пилот-сигнал TDM на основе всех бит для информации и посылает эти пилот-сигналы TDM. Терминал выполняет обнаружение для получения первого обнаруженного значения для первого пилот-сигнала TDM, выполняет обнаружение на основе первого обнаруженного значения для получения второго обнаруженного значения для второго пилот-сигнала TDM и выполняет обнаружение на основе первого и второго обнаруженных значений для получения третьего обнаруженного значения для третьего пилот-сигнала TDM. Техническим результатом является быстрый и надежный сбор данных для обнаружения базовых станций. 8 н. и 35 з.п. ф-лы, 13 ил.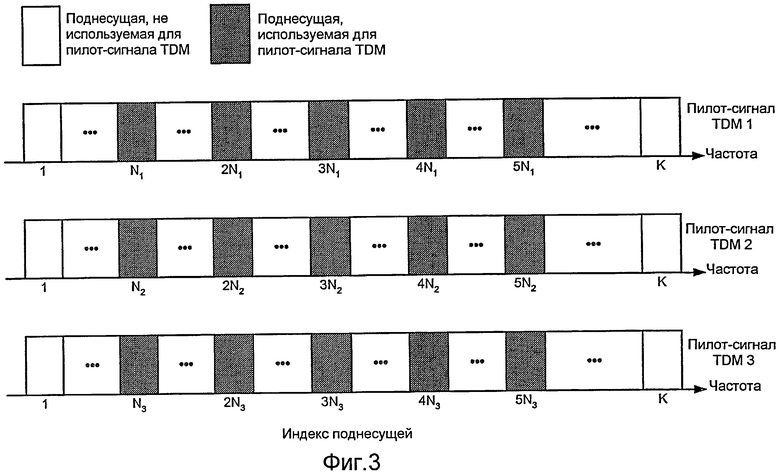
1. Устройство для передачи пилот-сигналов в системе беспроводной связи, содержащее:
по меньшей мере один процессор, сконфигурированный для создания первого пилот-сигнала на основе первого набора бит информации для посылки в пилот-сигналах, для создания второго пилот-сигнала на основе второго набора бит информации, причем второй набор бит отличается от первого набора бит, для создания третьего пилот-сигнала на основе всех бит информации, и для посылки первого, второго и третьего пилот-сигналов в первом, втором и третьем временных интервалах соответственно.
2. Устройство по п.1, в котором первый и второй пилот-сигналы несут перекрывающиеся наборы бит информации.
3. Устройство по п.1, в котором первый и второй пилот-сигналы несут не перекрывающиеся наборы бит информации.
4. Устройство по п.1, при этом первый набор включает в себя M1 бит информации, и при этом второй набор включает в себя M1 бит в первом наборе и М2 дополнительных бит информации, где M1 и М2 являются целочисленными значениями.
5. Устройство по п.1, при этом второй набор включает в себя все биты информации.
6. Устройство по п.1, при этом первый набор бит и второй набор бит включают в себя идентификатор (ID) сектора.
7. Устройство по п.1, в котором по меньшей мере один процессор сконфигурирован для создания по меньшей мере одной последовательности псевдослучайных чисел (PN) для каждого пилот-сигнала на основе набора бит для посылки в пилот-сигнале, и для создания каждого пилот-сигнала на основе по меньшей мере одной PN последовательности для пилот-сигнала.
8. Устройство по п.1, в котором для каждого пилот-сигнала по меньшей мере один процессор сконфигурирован для создания по меньшей мере одной последовательности псевдослучайных чисел (PN) на основе набора бит для посылки в пилот-сигнале, для создания символов пилот-сигналов на основе по меньшей мере одной PN последовательности, для отображения символов пилот-сигналов на поднесущие, используемые для пилот-сигнала, и для преобразования отображенных символов пилот-сигналов для получения последовательности отсчетов для пилот-сигнала.
9. Устройство по п.1, в котором третий пилот-сигнал посылают на поднесущих, равномерно распределенных по ширине полосе пропускания системы.
10. Устройство по п.1, в котором первый, второй и третий пилот-сигналы являются мультиплексированными с разделением времени (TDM) и посылаются в различных периодах символа кадра предварительно определенной временной длительности.
11. Устройство по п.1, в котором информация для посылки в пилот-сигналах содержит информацию, относящуюся к сектору, или системную информацию, или и ту и другую.
12. Способ передачи пилот-сигналов в системе беспроводной связи, содержащий:
создание первого пилот-сигнала на основе первого набора бит информации для посылки в пилот-сигналах;
создание второго пилот-сигнала на основе второго набора бит информации, причем второй набор бит отличается от первого набора бит;
создание третьего пилот-сигнала на основе всех бит информации; и
посылку первого, второго и третьего пилот-сигналов в первом, втором и третьем временных интервалах соответственно.
13. Способ по п.12, в котором первый и второй пилот-сигналы несут перекрывающиеся наборы бит информации.
14. Способ по п.12, в котором второй набор включает в себя все биты информации.
15. Способ по п.12, дополнительно содержащий:
создание по меньшей мере одной последовательности псевдослучайных чисел (PN) для каждого пилот-сигнала на основе набора бит для посылки в пилот-сигнале, и
создание каждого пилот-сигнала на основе по меньшей мере одной PN последовательности для пилот-сигнала.
16. Устройство для передачи пилот-сигналов в системе беспроводной связи, содержащее:
средство для создания первого пилот-сигнала на основе первого набора бит информации для посылки в пилот-сигналах;
средство для создания второго пилот-сигнала на основе второго набора бит информации, причем второй набор бит отличается от первого набора бит;
средство для создания третьего пилот-сигнала на основе всех бит информации; и
средство для посылки первого, второго и третьего пилот-сигналов в первом, втором и третьем временных интервалах, соответственно.
17. Устройство по п.16, в котором первый и второй пилот-сигналы несут перекрывающиеся наборы бит информации.
18. Устройство по п.16, в котором второй набор включает в себя все биты информации.
19. Устройство по п.16, дополнительно содержащее:
средство для создания по меньшей мере одной последовательности псевдослучайных чисел (PN) для каждого пилот-сигнала на основе набора бит для посылки в пилот-сигнале, и
средство для создания каждого пилот-сигнала на основе по меньшей мере одной PN последовательности для пилот-сигнала.
20. Читаемый процессором носитель, включающий в себя хранящиеся на нем команды для осуществления способа передачи пилот-сигналов в системе беспроводной связи, причем читаемый процессором носитель содержит:
команды для создания первого пилот-сигнала на основе первого набора бит информации для посылки в пилот-сигналах;
команды для создания второго пилот-сигнала на основе второго набора бит информации, причем второй набор бит отличается от первого набора бит;
команды для создания третьего пилот-сигнала на основе всех бит информации; и
команды для посылки первого, второго и третьего пилот-сигналов в первом, втором и третьем временных интервалах соответственно.
21. Читаемый процессором носитель по п.20, в котором первый и второй пилот-сигналы несут перекрывающиеся наборы бит информации.
22. Читаемый процессором носитель по п.20, в котором второй набор включает в себя все биты информации.
23. Устройство для приема пилот-сигналов в системе беспроводной связи, содержащее:
по меньшей мере один процессор, сконфигурированный для приема первого, второго и третьего пилот-сигналов в первом, втором и третьем временных интервалах соответственно, причем первый, второй и третий пилот-сигналы несут первый, второй и третий наборы бит, соответственно, информации, посланных в пилот-сигналах, причем каждый набор включает в себя некоторые или все биты информации, при этом второй набор бит отличается от первого набора бит, и для выполнения обнаружения для первого, второго и третьего пилот-сигналов.
24. Устройство по п.23, в котором по меньшей мере один процессор сконфигурирован для выполнения обнаружения для первого пилот-сигнала для получения первого обнаруженного значения для первого набора бит, посланных в первом пилот-сигнале, и для выполнения обнаружения для второго пилот-сигнала на основе первого обнаруженного значения для получения второго обнаруженного значения для второго набора бит, посланных во втором пилот-сигнале.
25. Устройство по п.23, в котором по меньшей мере один процессор сконфигурирован для выполнения обнаружения для первого пилот-сигнала для получения первого обнаруженного значения для первого набора бит, посланных в первом пилот-сигнале, для выполнения обнаружения для второго пилот-сигнала на основе первого обнаруженного значения для получения второго обнаруженного значения для второго набора бит, посланных во втором пилот-сигнале, причем второй набор бит содержит первый набор бит, и для выполнения обнаружения для третьего пилот-сигнала на основе первого и второго обнаруженных значений.
26. Устройство по п.23, в котором по меньшей мере один процессор сконфигурирован для выполнения обнаружения для каждого пилот-сигнала на основе обнаруженных значений для пилот-сигналов, обнаруженных ранее, если это имеет место.
27. Устройство по п.23, в котором для первого пилот-сигнала по меньшей мере один процессор сконфигурирован для определения метрики обнаружения для каждого из множества гипотетических значений для первого пилот-сигнала и для обеспечения гипотетического значения, связанного с наибольшей метрикой обнаружения, в качестве первого обнаруженного значения для первого набора бит, посланных в первом пилот-сигнале.
28. Устройство по п.27, в котором для второго пилот-сигнала по меньшей мере один процессор сконфигурирован для определения метрики обнаружения для каждого из множества гипотетических значений для второго пилот-сигнала, причем каждое гипотетическое значение для второго пилот-сигнала содержит первую часть для первого обнаруженного значения для первого пилот-сигнала, и вторую часть для неизвестного значения по меньшей мере для одного дополнительного бита, посланного во втором пилот-сигнале, и для обеспечения гипотетического значения, связанного с наибольшей метрикой обнаружения для второго пилот-сигнала, в качестве второго обнаруженного значения для второго набора бит, посланных во втором пилот-сигнале.
29. Устройство по п.23, в котором для каждого пилот-сигнала по меньшей мере один процессор сконфигурирован для получения оценки шума на основе захваченных отсчетов для пилот-сигнала, для создания множества последовательностей псевдослучайных чисел (PN) для множества гипотетических значений для пилот-сигнала, для дескремблирования захваченных отсчетов на основе множества PN последовательностей для получения множества последовательностей дескремблированных отсчетов для множества гипотетических значений, для получения множества метрик обнаружения для множества гипотетических значений на основе множества последовательностей дескремблированных отсчетов и оценки шума и для обеспечения гипотетического значения, связанного с наибольшей метрикой обнаружения, в качестве обнаруженного значения для набора бит, посланных в пилот-сигнале.
30. Устройство по п.23, в котором по меньшей мере один процессор сконфигурирован для получения информации временной синхронизации от первого пилот-сигнала.
31. Устройство по п.23, в котором по меньшей мере один процессор сконфигурирован для получения идентификатора (ID) сектора от первого и второго пилот-сигналов.
32. Способ приема пилот-сигналов в системе беспроводной связи, содержащий:
прием первого, второго и третьего пилот-сигналов в первом, втором и третьем временных интервалах соответственно, причем первый, второй и третий пилот-сигналы несут первый, второй и третий набор бит, соответственно, информации, посланных в пилот-сигналах, причем каждый набор включает в себя некоторые или все биты информации, причем второй набор бит отличается от первого набора бит; и
выполнение обнаружения для первого, второго и третьего пилот-сигналов.
33. Способ по п.32, в котором выполнение обнаружения содержит:
выполнение обнаружения для первого пилот-сигнала для получения первого обнаруженного значения для первого набора бит, посланных в первом пилот-сигнале, и
выполнение обнаружения для второго пилот-сигнала на основе первого обнаруженного значения для получения второго обнаруженного значения для второго набора бит, посланных во втором пилот-сигнале.
34. Способ по п.32, в котором выполнение обнаружения содержит:
выполнение обнаружения для первого пилот-сигнала для получения первого обнаруженного значения для первого набора бит, посланных в первом пилот-сигнале,
выполнение обнаружения для второго пилот-сигнала на основе первого обнаруженного значения для получения второго обнаруженного значения для второго набора бит, посланных во втором пилот-сигнале, причем второй набор бит содержит первый набор бит, и
выполнение обнаружения для третьего пилот-сигнала на основе первого и второго обнаруженных значений.
35. Способ по п.32, в котором выполнение обнаружения содержит:
определение метрики обнаружения для каждого из множества гипотетических значений для первого пилот-сигнала, и
обеспечение гипотетического значения, связанного с наибольшей метрикой обнаружения, в качестве обнаруженного значения для первого набора бит, посланных в первом пилот-сигнале.
36. Устройство для приема пилот-сигналов в системе беспроводной связи, содержащее:
средство для приема первого, второго и третьего пилот-сигналов в первом, втором и третьем временных интервалах соответственно, причем первый, второй и третий пилот-сигналы несут первый, второй и третий набор бит, соответственно, информации, посланных в пилот-сигналах, причем каждый набор включает в себя некоторые или все биты информации, причем второй набор бит отличается от первого набора бит; и
средство для выполнения обнаружения для первого, второго и третьего пилот-сигналов.
37. Устройство по п.36, в котором средство для выполнения обнаружения содержит:
средство для выполнения обнаружения для первого пилот-сигнала для получения первого обнаруженного значения для первого набора бит, посланных в первом пилот-сигнале, и
средство для выполнения обнаружения для второго пилот-сигнала на основе первого обнаруженного значения для получения второго обнаруженного значения для второго набора бит, посланных во втором пилот-сигнале.
38. Устройство по п.36, в котором средство для выполнения обнаружения содержит:
средство для выполнения обнаружения для первого пилот-сигнала для получения первого обнаруженного значения для первого набора бит, посланных в первом пилот-сигнале,
средство для выполнения обнаружения для второго пилот-сигнала на основе первого обнаруженного значения для получения второго обнаруженного значения для второго набора бит, посланных во втором пилот-сигнале, причем второй набор бит содержит первый набор бит, и
средство для выполнения обнаружения для третьего пилот-сигнала на основе первого и второго обнаруженных значений.
39. Устройство по п.36, в котором средство для выполнения обнаружения содержит:
средство для определения метрики обнаружения для каждого из множества гипотетических значений для первого пилот-сигнала, и
средство для обеспечения гипотетического значения, связанного с наибольшей метрикой обнаружения, в качестве обнаруженного значения для первого набора бит, посланных в первом пилот-сигнале.
40. Читаемый процессором носитель, включающий в себя хранящиеся на нем команды для осуществления способа приема пилот-сигналов в системе беспроводной связи, содержащий:
команды для приема первого, второго и третьего пилот-сигналов в первом, втором и третьем временных интервалах соответственно, причем первый, второй и третий пилот-сигналы несут первый, второй и третий наборы бит, соответственно, информации, посланных в пилот-сигналах, причем каждый набор включает в себя некоторые или все биты информации, при этом второй набор бит отличается от первого набора бит; и
команды для выполнения обнаружения для первого, второго и третьего пилот-сигналов.
41. Читаемый процессором носитель по п.40, в котором команды для выполнения обнаружения содержат:
команды для выполнения обнаружения для первого пилот-сигнала для получения первого обнаруженного значения для первого набора бит, посланных в первом пилот-сигнале, и
команды для выполнения обнаружения для второго пилот-сигнала на основе первого обнаруженного значения для получения второго обнаруженного значения для второго набора бит, посланных во втором пилот-сигнале.
42. Читаемый процессором носитель по п.40, в котором команды для выполнения обнаружения содержат:
команды для выполнения обнаружения для первого пилот-сигнала для получения первого обнаруженного значения для первого набора бит, посланных в первом пилот-сигнале,
команды для выполнения обнаружения для второго пилот-сигнала на основе первого обнаруженного значения для получения второго обнаруженного значения для второго набора бит, посланных во втором пилот-сигнале, причем второй набор бит содержит первый набор бит, и
команды для выполнения обнаружения для третьего пилот-сигнала на основе первого и второго обнаруженных значений.
43. Читаемый процессором носитель по п.40, в котором команды для выполнения обнаружения содержат:
команды для определения метрики обнаружения для каждого из множества гипотетических значений для первого пилот-сигнала, и
команды для обеспечения гипотетического значения, связанного с наибольшей метрикой обнаружения, в качестве обнаруженного значения для первого набора бит, посланных в первом пилот-сигнале.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВРЕМЕНИ ВЫПОЛНЕНИЯ ЖЕСТКОГО ПЕРЕКЛЮЧЕНИЯ КАНАЛА СВЯЗИ С ЧАСТОТЫ НА ЧАСТОТУ И УСТАНОВЛЕНИЯ СРЕДЫ ЖЕСТКОГО ПЕРЕКЛЮЧЕНИЯ КАНАЛА СВЯЗИ | 1999 |
|
RU2178239C2 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

