Изобретение относится к области авиационного приборостроения, а именно к бортовым цифровым вычислительно-преобразующим устройствам, системам и комплексам прицельно-навигационного и пилотажно-управляющего оборудования летательных аппаратов.
Из известных аналогов ([1] Е.А.Федосов «Авиация ПВО России и научно-технический прогресс», Москва, Дрофа, 2001 г., стр.533-552; [2] «Бортовое цифровое вычислительно-преобразующее устройство» патент RU 2287452 C1 с приоритетом 22.12.2005 г., [3] заявка №2009124991/11 (034574) с решением о выдаче патента на изобретение от 14.01.10 г.; [4] Мелехин В.Ф., Павловский Е.Г. «Вычислительные машины, системы и сети», Москва, Академия, 2010 г.) наиболее близким является [1], где на стр.549 представлена блок-схема бортовой цифровой вычислительно-управляющей системы современных многофункциональных самолетов, содержащей бортовые цифровые вычислительные машины, вычислительно-преобразующие и распределительные устройства, энергонезависимые запоминающие устройства, информационные и индикационно-управляющие устройства, подключенные к бортовому каналу информационного обмена и распределенные по программируемым частям блоков, системные и функциональные программно-алгоритмические средства, взаимодействующие в соответствии с бортовой магистралью вычислительно-логического обмена.
Техническим результатом изобретения является расширение функциональных возможностей системы и входящих в нее устройств в части оптимизации использования аппаратных и программно-алгоритмических средств, особенно в условиях критических ситуаций -отказы, сбои, частичные деградации аппаратуры, трансформации в соответствии с внутренними и внешними событиями.
Достигается указанный результат тем, что бортовая цифровая вычислительно-управляющая система, включающая подключенные к бортовому каналу информационного обмена m (m≥0) бортовых цифровых вычислительных машин, n (n≥0) вычислительно-преобразующих и распределительных устройств, r (r≥0) энергонезависимых запоминающих устройств, s (s≥0) информационных и индикационно-управляющих устройств, программируемые части которых содержат взаимодействующие в соответствии с магистралью вычислительно-логического обмена, системные и функциональные программно-алгоритмические средства, дополнительно снабжена программно-алгоритмическим модулем координации взаимодействия системных программно-алгоритмических средств и программно-алгоритмическим модулем координации взаимодействия функциональных программно-алгоритмических средств, распределенных по магистрали вычислительно-логического обмена и по взаимодействующим в соответствии с нею системным и функциональным программно-алгоритмическим средствам программируемых частей m бортовых цифровых вычислительных машин, n вычислительно-преобразующих и распределительных устройств, r энергонезависимых запоминающих устройств, s информационных и индикационно-управляющих устройств.
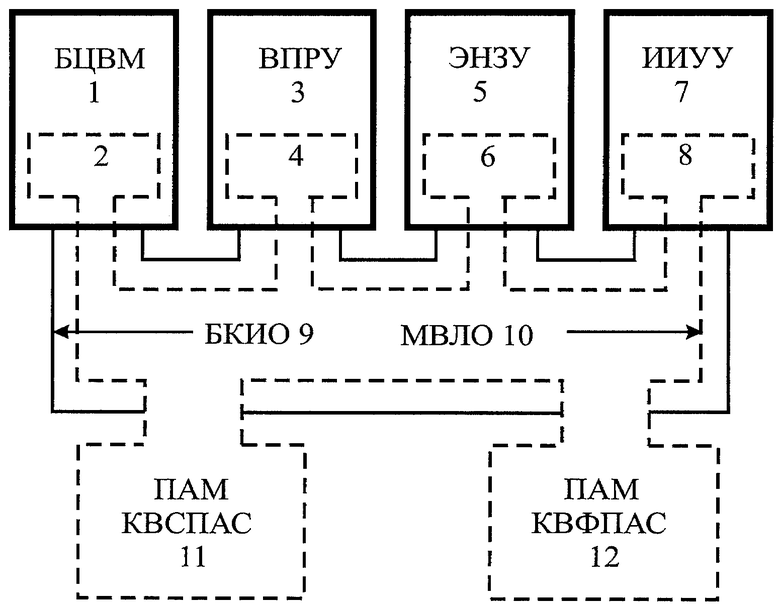
На чертеже представлена блок-схема бортовой цифровой вычислительно-управляющей системы летательных аппаратов, содержащей: 1 - бортовая цифровая вычислительная машина БЦВМ, 2 - программируемая часть (ПЧ) БЦВМ, 3 - вычислительно-преобразующее и распределительное устройство ВПРУ, 4 - программируемая часть (ПЧ) ВПРУ, 5 - энергонезависимое запоминающее устройство ЭНЗУ, 6 - программируемая часть (ПЧ) ЭНЗУ, 7 - информационное и индикационно-управляющее устройство ИИУУ, 8 - программируемая часть (ПЧ) ИИУУ, 9 - бортовой канал информационного обмена БКИО, 10 - магистраль вычислительно-логического обмена МВЛО, 11 - программно-алгоритмический модуль (ПАМ) координации взаимодействия системных программно-алгоритмических средств КВСПАС, 12 - программно-алгоритмический модуль (ПАМ) функциональных программно-алгоритмических средств КВФПАС.
Взаимодействие блоков (и их программируемых частей) системы осуществляется по БКИО 9, не входящему в состав системы.
БКИО 9 может включать программируемые блоки местного управления (контроллеры), обеспечивающие преобразование и распределение последовательностей команд с использованием интерфейсов различного типа ([1], стр.544) VME, CPCI, Rapid 10, PCIE, ГОСТ 26765.52-87, ГОСТ 3-50832-95, STANAG 3350, RS-232C, RS-423, RS-449, RS-485, Fibre Channel, AFDX, обеспечивающих пропускную способность и взаимный обмен в реальном времени.
Программируемой частью (ПЧ) БКИО 9 является МВЛО 10, включающая программно-алгоритмические средства контроллеров и реализацию принципов коммуникации, определяемых вышеупомянутыми интерфейсами, и формирующая обобщенный интерфейс, работающий в едином логическом протоколе обмена, при этом возможно подключение однонаправленных и двунаправленных каналов обмена, а отдельные программно-алгоритмические сегменты (формирования, расширения и преобразование интерфейсов) МВЛО 10 могут быть реализованы в устройствах ввода-вывода или оконечных устройствах блоков системы.
К БКИО 9 подключаются также бортовые системы, блоки и устройства, не входящие в состав данной системы, и наземные устройства, обеспечивающие контроль и тестирование аппаратуры при наземных проверочных и отладочных работах.
В составе системы может быть m (m≥0) БЦВМ 1 (одного или разных типов), причем количество m определяется задачами резервирования и функционального назначения - навигация и наведение, управление летательным аппаратом, подготовка и применение средств поражения и противодействия, целеуказание от различных лоцирующих окружающее пространство устройств, ведение специальных групповых действий.
БЦВМ 1 типа приведенной в [3], включает модули центрального процессора, периферийных процессоров, устройства памяти и ввода-вывода, взаимосоединенные по внутримашинному каналу информационно-вычислительного обмена, подключаемому к БКИО 9 непосредственно и через устройство ввода-вывода. Программируемая часть ПЧ 2 каждой из m БЦВМ 1 включает системные и функциональные программно-алгоритмические средства, взаимодействующие в соответствии с внутримашинной магистралью вычислительно-логического обмена, которая является частью МВЛО 10. Системные программно-алгоритмические средства обеспечивают общее функционирование БЦВМ 1. Функциональные программно-алгоритмические средства по управлению от системных программно-алгоритмических средств в соответствии с внутренней магистралью вычислительно-логического обмена, во взаимодействии непосредственно или через устройство ввода-вывода с МВЛО 10, ПЧ 4, ПЧ 6, ПЧ 8 обеспечивают решение каждой из m БЦВМ 1 конкретных задач навигации, управления, наведения, групповых действий, приема, обработки сигналов и выдачи необходимых параметров в БКИО 9 в текущем реальном времени.
В составе системы может быть n (n≥0) ВПРУ 3 с программируемой частью ПЧ 4. Каждое из n ВПРУ 3 подключено к БКИО 9 и фактически является специализированным цифровым вычислительно-преобразующим устройством (см. [2]), обеспечивающим решение задач:
- преобразования и распределения телевизионных сигналов от различных датчиков и устройств с телевизионными входами и выходами;
- формирования и распределения селективных напряжений питания;
- формирования, преобразования и распределения различных интерфейсов в том числе локальных каналов обмена;
- взаимодействия со средствами активного и пассивного противодействия.
В каждом из n ВПРУ 3 с программируемой частью ПЧ 4 системные и функциональные программно-алгоритмические средства взаимодействуют в соответствии с внутренней магистралью вычислительно-логического обмена, являющейся частью МВЛО 10.
В составе системы может быть r (r≥0) ЭНЗУ 5, подключенных к БКИО 9. Каждое r ЭНЗУ 5 ([1], стр.548) является банком данных или программ, обеспечивающим долговременное хранение данных по навигации, средствам активного и пассивного противодействия, множеству маршрутов полетов, параметров физических полей Земли и звездного неба, состояния летательного аппарата, координат и характеристик целей и ориентиров, картографической информации, полетных заданий, резервных программ. ПЧ 6 каждого из r ЭНЗУ 5 включает системные и функциональные программно-алгоритмические средства, взаимодействующие в соответствии с внутренней магистралью вычислительно-логического обмена, являющейся частью МВЛО 10.
В составе системы ([1], стр.549) может быть s (s≥0) ИИУУ7, подключенных к БКИО 9, в том числе информационные устройства локации пространства, параметров состояния летательного аппарата, его оборудования и окружающей воздушной среды, навигации и пилотирования, индикационные приборы, многофункциональные и индикаторы, пульты-индикаторы, пульты управления и манипуляторы.
ПЧ 8 каждого из s ИИУУ 7 содержит системные и функциональные программно-алгоритмические средства, взаимодействующие в соответствии с внутренней магистралью вычислительно-логического обмена, являющейся частью МВЛО 10.
В итоге m БЦВМ 1, n ВПРУ 3, r ЭНЗУ 5, s ИИУУ 7, взаимосвязанные по БКИО 9, функционируют во взаимодействии в соответствии с логикой программируемых частей ПЧ 2, ПЧ 4, ПЧ 6, ПЧ 8, системные и функциональные программно-алгоритмические средства которых взаимодействуют в соответствии с МВЛО 10.
В процессе полета могут иметь место ситуации:
- в маршрутном полете часть БЦВМ 1, ВПРУ 3 решают задачи навигации, управления и обзора окружающего пространства, а часть БЦВМ 1, решающих задачи применения средств противодействия, целеуказания, функционируют в холостом режиме ожидания без использования их аппаратного и программно-алгоритмического потенциала;
- при отказах или сбоях в одной из m БЦВМ 1 или в одном из n ВПРУ 3 при отсутствии резервирования система становится неработоспосбной, что ведет к срыву полетного задания и к критическим последствиям;
- в сложных ситуациях ведения групповых действий с одновременной атакой наземной цели и противодействия воздушным целям возможен выход системы на предельные возможности производительности, что может привести к временным задержкам, непредвиденным информационным неопределенностям и кратковременным сбоям.
Дополнительно введенный программно-алгоритмический модуль КВСПАС 11 во взаимосвязи через МВЛО 10 с системными программно-алгоритмическими средствами ПЧ 2, ПЧ4, ПЧ 6, ПЧ 8 обеспечивает координацию взаимодействия этих средств по программно-алгоритмическим сегментам (компонентам):
- начальный тест, инициализация МВЛО 10, ПЧ 2, ГТЧ 4, ПЧ 6, ПЧ 8;
- организация и ведение службы единого реального времени;
- функции синхронизации БЦВМ 1, ВПРУ 3, ЭНЗУ 5, ИИУУ 7 по БКИО 9 и ПЧ 2, ПЧ 4, ПЧ 6, ПЧ 8 в соответствии с МВЛО 10;
- функции приоритетного (очередь и порядок) управления решаемыми задачами (в том числе в ПАМ КВФПАС 12) в реальном времени;
- функции синхронизации информационных потоков в реальном времени и по фактам выдачи данных от информационных датчиков и приема данных в индикационно-управляющие устройства;
- функции автономного и тестового контроля, взаимодействия по БКИО 9 в соответствии с МВЛО 10 с аппаратными и программно-алгоритмическими средствами рабочего места программиста (удаленный «отладчик»), оператора ввода программ, контрольно-проверочной аппаратурой и аппаратурой (бортовой и наземной) записи и хранения параметров состояния аппаратуры и агрегатов летательного аппарата, параметров движения и окружающего пространства;
- отслеживание и экспертная оценка событий (отказы, сбои, нарушения прав доступа) в аппаратных и программно-алгоритмических средствах БЦВМ 1, ВПРУ 3, ЭНЗУ 5, ИИУУ 7 и внешней (не входящей в состав системы) аппаратуре, подключенной к БКИО 9;
- установление приоритетов функционирования и принятие решений по реконфигурации аппаратных и программно-алгоритмических средств возможно с оперативным перепрограммированием программируемых частей блоков ПЧ 2, ПЧ 4, ПЧ 6, ПЧ 8 и МВЛО 10.
Дополнительно введенный программно-алгоритмический модуль КВФПАС 12 во взаимодействии с ПАМ КВСПАС 11 в соответствии с МВЛО 10 обеспечивает распределение и решение функциональных задач БЦВМ 1, ВПРУ 3, ЭНЗУ 5, ИИУУ 7 в зависимости от состава и произошедших внутренних и внешних событий (сбои, отказы, трансформации аппаратных и программно-алгоритмических средств).
Программно-алгоритмические модули КВСПАС 11 и КВФПАС 12 таким образом во взаимодействии с программно-алгоритмическими средствами ГГЧ 2, ПЧ 4, ПЧ 6, ПЧ 8 в соответствии с МВЛО 10 в реальной закрытой архитектуре бортовой цифровой вычислительно-управляющей системы посредством формирования единого трансляционного, информационного, индикационного, вычислительно-преобразующего, событийного пространства состояний системы реализуют концепцию открытой архитектуры и интеграции, обеспечивая выполнение задач бортовой цифровой вычислительно-управляющей системы в условиях априорных трансформаций и возникновении непредвиденных ситуаций, что существенно увеличивает функциональные возможности системы в части оптимального использования ее ресурсов.
Программно-алгоритмические модули КВСПАС 11 и КВФПАС 12 вводятся, например, с носителя типа флэш-карта или с удаленного «отладчика» через БКИО 9 в соответствии с МВЛО 10 в одно или несколько из r ПЧ 6 с последующей трансляцией в ПЧ 2, ПЧ 4, ПЧ 8 или непосредственно в их устройства долговременной памяти. При этом взаимодействие КВСПАС 11 и КВФПАС 12 с системными и функциональными программно-алгоритмическими средствами в программируемых частях блоков системы осуществляется в соответствии с внутренними магистралями вычислительно-логического обмена. Возможна реализация КВПАС 11 в составе системных и КВФПАС 12 в составе функциональных программно-алгоритмических средств программируемых частей блоков системы ПЧ 2, ПЧ 4, ПЧ 6, ПЧ 8.
Область использования предлагаемого технического решения:
- каждый из m, n, r, s блоков системы;
различные конфигурации системы в зависимости от сочетаний m≥0, n≥0, r≥0, s≥0, реализующих комплексы бортового прицельно-навигационного и пилотажного оборудования, прицельные, навигационные, индикационно-управляющие системы и приборы.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА КОМПЛЕКСОВ УПРАВЛЕНИЯ И НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2009 |
|
RU2392194C1 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2468338C1 |
| ПАНОРАМНЫЙ АВИАЦИОННЫЙ ИНДИКАТОР | 2022 |
|
RU2800102C1 |
| ЦИФРОВОЕ ВЫЧИСЛИТЕЛЬНО-ПРЕОБРАЗУЮЩЕЕ УСТРОЙСТВО КОМПЛЕКСОВ УПРАВЛЕНИЯ, ИНДИКАЦИИ И НАВИГАЦИИ САМОЛЕТА | 2005 |
|
RU2287452C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2005 |
|
RU2282156C1 |
| КОЛЛИМАТОРНЫЙ АВИАЦИОННЫЙ ИНДИКАТОР | 2009 |
|
RU2431204C2 |
| Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолетных систем | 2018 |
|
RU2696274C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ Ku-ДИАПАЗОНА | 2021 |
|
RU2787574C1 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2019 |
|
RU2767938C2 |
| ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА ДИСТАНЦИОННО-УПРАВЛЯЕМОГО ПОДВИЖНОГО ОБЪЕКТА | 2013 |
|
RU2532603C1 |
Изобретение относится к области авиационного приборостроения, а именно к комплексам бортового оборудования, вычислительным машинам, системам, приборам и устройствам, обеспечивающим проведение вычислительных процессов, взаимосвязь, управление оборудованием и индикационное обеспечение экипажей летательных аппаратов. Система включает бортовые цифровые вычислительные машины, вычислительно-преобразующие и распределительные устройства, энергонезависимые запоминающие устройства, информационные и индикационно-управляющие устройства, взаимосоединенные по бортовому каналу информационного обмена. Имеются также распределенные по их программируемым частям, системные и функциональные программно-алгоритмические средства, взаимодействующие в соответствии с магистралью вычислительно-логического обмена в реальном времени. Введение в состав системы программно-алгоритмических модулей координации взаимодействия системных программно-алгоритмических средств и координации взаимодействия функциональных программно-алгоритмических средств, распределенных по магистрали вычислительно-логического обмена и по взаимодействующим в соответствии с нею системным и функциональным программно-алгоритмическим средствам программируемых частей блоков системы, расширяет функциональные возможности системы в целом и ее блоков в отдельности в части оптимального использования аппаратных, программно-алгоритмических и вычислительных ресурсов, особенно в условиях критических ситуаций. В результате повышается эффективность использования оборудования и снабженных им летательных аппаратов. 1 ил.
Бортовая цифровая вычислительно-управляющая система летательных аппаратов, включающая подключенные к бортовому каналу информационного обмена m (m≥0) бортовых цифровых вычислительных машин, n (n≥0) вычислительно-преобразующих и распределительных устройств, r (r≥0) энергонезависимых запоминающих устройств, s (s≥0) информационных и индикационно-управляющих устройств, программируемые части которых содержат взаимодействующие в соответствии с магистралью вычислительно-логического обмена системные и функциональные программно-алгоритмические средства, отличающаяся тем, что в нее дополнительно введены программно-алгоритмический модуль координации взаимодействия системных программно-алгоритмических средств и программно-алгоритмический модуль координации взаимодействия функциональных программно-алгоритмических средств, распределенные по магистрали вычислительно-логического обмена и по взаимодействующим в соответствии с нею системным и функциональным программно-алгоритмическим средствам программируемых частей m бортовых цифровых вычислительных машин, n вычислительно-преобразующих и распределительных устройств, r энергонезависимых запоминающих устройств, s информационных и индикационно-управляющих устройств.
| ФЕДОСОВ Е.А | |||
| Авиация ПВО России и научно-технический прогресс | |||
| - М.: Дрофа, 2001, с.533-552 | |||
| ЦИФРОВОЕ ВЫЧИСЛИТЕЛЬНО-ПРЕОБРАЗУЮЩЕЕ УСТРОЙСТВО КОМПЛЕКСОВ УПРАВЛЕНИЯ, ИНДИКАЦИИ И НАВИГАЦИИ САМОЛЕТА | 2005 |
|
RU2287452C1 |
| РАСПРЕДЕЛЕННЫЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ГРУППЫ МНОГОФУНКЦИОНАЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2232102C1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЩЕСАМОЛЕТНЫМ ОБОРУДОВАНИЕМ | 2004 |
|
RU2263045C1 |

