Изобретение относится к области авиационной техники, а именно к комплексам навигации, управления и наведения летательных аппаратов (ЛА).
В наиболее близком аналоге, приведенном в книге [3] (Фомин А.В. Су-27. История истребителя. - М.: РА “Интервестник”, 2000 г.) на стр. 229-232, 238-242, представлен информационно-управляющий комплекс (ИУК) ЛА, включающий в себя навигационные, пилотажные, прицельные, обзорные, измерительные датчики и системы, работающие на различных физических принципах: инерциальные навигационные системы (ИНС) и датчики; радиотехнические средства навигации, включающие радиосистемы ближней (РСБН) и дальней (РСДН) навигации, доплеровские измерители скорости и сноса (ДИСС), спутниковые навигационные системы (СНС); системы опознавания образов естественных и искусственных полей (рельефа земной поверхности, магнитного поля Земли, гравитационного поля Земли, поля радиолокационного контраста и др.); воздушные (аэрометрические) датчики и системы, включающие в себя систему воздушных сигналов (СВС) и датчики углов атаки и скольжения (ДУАС); обзорно-прицельные средства локации пространства, визирования ориентиров и слежения за подвижными и неподвижными объектами (астровизирные средства, тепло-, оптико-, радиовизирные средства), а также вычислительную систему, обеспечивающую информационный обмен между датчиками и системами и расчет необходимых навигационно-пилотажных и специальных параметров состояния ЛА. Вычислительная система при этом содержит следующие блоки: блок ввода-вывода и управления информационным обменом, обеспечивающий информационный обмен между компонентами комплекса; блок формирования параметров состояния ЛА, обеспечивающий расчет основных информационных параметров состояния и движения ЛА (азимуты и дальности до ориентиров, отклонения от заданной траектории, координаты, скорости, ускорения, углы ориентации ЛА - см. [1], стр. 7); блок комплексной обработки информации, поступающей от разных измерителей. Комплекс обеспечивает обработку информации различных датчиков и систем, определение параметров движения ЛА, определение параметров относительного движения ЛА в группе, информационное взаимодействие с экипажем, управление состоянием ЛА. Информационно-управляющий комплекс группы ЛА, каждый из которых оснащен таким ИУК, представляет собой совокупность независимых ИУК отдельных ЛА, каждый из которых выполняет свою задачу в составе группы.
Основным недостатком наиболее близкого аналога является то, что при отказах или отключениях систем, входящих в состав комплексов отдельных ЛА, входящих в группу, группа как единое целое становится неработоспособной.
Задачей изобретения является расширение функциональных возможностей ИУК и, как следствие этого, повышение эффективности работы группы многофункциональных ЛА (МЛА), снабженных ИУК.
Достигается указанный результат тем, что распределенный информационно-управляющий комплекс группы многофункциональных летательных аппаратов (РИУК ГМЛА), содержит совокупность информационно-управляющих комплексов, размещенных на каждом многофункциональном летательном аппарате, входящем в группу, и взаимосоединенных между собой по принципу “каждый с каждым” по каналам межбортового обмена, причем каждый информационно-управляющий комплекс многофункционального летательного аппарата содержит взаимосоединенные входами-выходами по магистрали информационного обмена систем радиотехнические средства навигации, обзорно-прицельные средства, системы опознавания образов, инерциальные датчики и системы, воздушные датчики и системы, индикационно-управляющие устройства, блок определения взаимных координат, блок средств связи, входы-выходы которого, количеством соответствующие числу летательных аппаратов в группе, являются входами-выходами ИУК МЛА, причем один вход-выход блока средств связи подключен к магистрали информационного обмена систем, а другие связаны по каналам межбортового обмена с аналогичными входами-выходами блоков средств связи других информационно-управляющих комплексов МЛА группы, вычислительную систему, включающую взаимосоединенные по магистрали вычислительного информационного обмена блок формирования параметров состояния, блок комплексной обработки информации, блок ввода-вывода и управления информационным обменом, другой вход-выход которого является входом-выходом вычислительной системы комплекса, каждый информационно-управляющий комплекс МЛА группы дополнительно снабжен введенными в состав вычислительной системы блоком синтеза параметров информационного пространства, блоком синтеза параметров состояния, блоком аварийного синтеза параметров состояния, блоком расчета параметров взаимных движений, подключенных к магистрали вычислительного информационного обмена вычислительной системы.
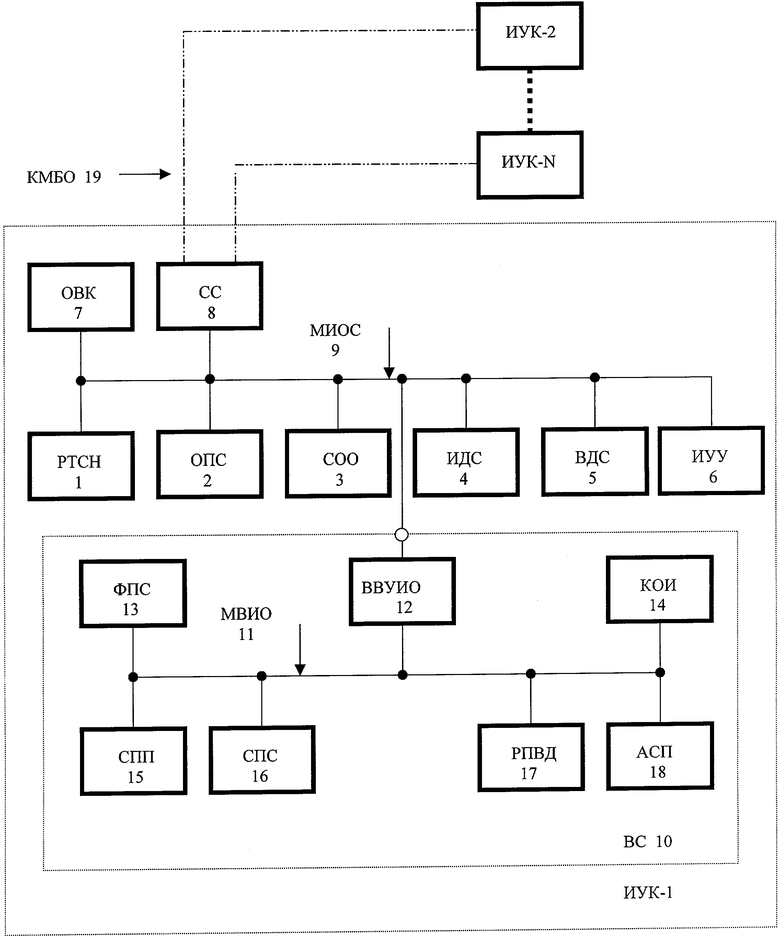
На чертеже представлена блок-схема распределенного информационно-управляющего комплекса группы МЛА, содержащего N информационно-управляющих комплексов отдельных МЛА (ИУК-1 - ИУК-N), объединенных в единое целое посредством каналов межбортового обмена КМБО 19, причем в состав ИУК каждого МЛА входят:
1 - радиотехнические средства навигации РТСН;
2 - обзорно-прицельные средства ОПС;
3 - системы опознавания образов СОО;
4 - инерциальные датчики и системы ИДС;
5 - воздушные датчики и системы ВДС;
6 - индикационно-управляющие устройства ИУУ;
7 - блок определения взаимных координат ОВК;
8 - блок средств связи СС;
9 - магистраль информационного обмена систем МИОС;
10 - вычислительная система ВС.
При этом в состав ВС 10 входят следующие блоки:
11 - магистраль вычислительного информационного обмена МВИО;
12 - блок ввода-вывода информации и управления информационным обменом ВВУИО;
13 - блок формирования параметров состояния ФПС;
14 - блок комплексной обработки информации КОИ;
15 - блок синтеза параметров пространства СПП;
16 - блок синтеза параметров состояния СПС;
17 - блок расчета параметров взаимного движения РПВД;
18 - блок аварийного синтеза параметров АСП.
Информационная взаимосвязь систем ИУК-n (n=1-N) осуществляется по МИОС 9 (на чертеже обозначена тонкой сплошной линией).
Информационный обмен между входами-выходами вычислительно-логических блоков ВС 10 осуществляется по МВИО 11 (на чертеже обозначена тонкой сплошной линией).
Информационная взаимосвязь ИУК-n (n=1-N) осуществляется по КМБО 19 (на чертеже обозначена тонкой штрих-пунктирной линией).
Блоки 1-8 подключены своими входами/выходами к магистрали информационного обмена систем, к которой подключен также вход/выход ВС 10, при этом входом/выходом ВС 10 является вход/выход блока ВВУИО 12, а другой вход/выход блока ВВУИО 12 подключен к внутренней магистрали вычислительного информационного обмена МВИО 11, к которой подключены также входы/выходы блоков 13-18.
Блоки 1-8 представляют собой известные датчики и системы бортового оборудования ЛА, описанные в литературе, например [1], стр. 8-16, 171-243, 316-317, 325-327, 374-385; [2], стр. 6-22; [3], стр. 229-242. В состав блока РТСН 1 входят: РСБН, измеряющая азимут радиомаяка и дальность до него, с помощью которых при известных координатах радиомаяка решается задача определения координат объекта; РСДН, измеряющая дальности до нескольких наземных радиостанций, с помощью которых при известных координатах станций решается задача определения координат объекта; ДИСС, измеряющая доплеровские сдвиги частот излучаемых радиосигналов, с помощью которых решается задача определения вектора скорости объекта; СНС, измеряющая временную задержку, фазовый сдвиг и доплеровский сдвиг частоты радиосигналов от космических спутников, с помощью которых при известных параметрах движения спутников решается задача определения времени, координат и скорости объекта; другие радиотехнические средства навигации, например радиовысотомер, радиокомпас и т.п. В состав блока ОПС 2 входят различные тепловые, оптические, радиолокационные средства визирования ориентиров (целей), измеряющие дальности до ориентиров и/или углы их визирования, с помощью которых при известных координатах ориентиров решается задача определения координат объекта, а при известных координатах объекта - задача определения координат целей. В состав блока СОО 3 входят измерители параметров различных геофизических поверхностных и пространственных полей: поля рельефа, магнитного поля, гравитационного поля, поля радиолокационного контраста и др., с помощью которых при известных закономерностях распределений этих полей в околоземном пространстве решается задача определения координат объекта, а при известных координатах объекта - задача картографирования указанных полей. В состав блока ИДС 4 входят: ИНС, решающие задачу автономного счисления скорости, координат и угловой ориентации объекта на основе измеряемых с помощью акселерометров и гироскопов, входящих в ИНС, ускорений и угловых скоростей (или углов ориентации) объекта; курсовертикали, решающие задачу счисления скорости и угловой ориентации объекта на основе измерительной информации гироскопов и акселерометров; акселерометры и гироскопы, измеряющие ускорения и угловые скорости (углы ориентации) в местах их расположения. В состав блока ВДС 5 входят СВС, измеряющие статические, динамические, полные давления воздуха, с помощью которых решаются задачи определения высоты и скорости объекта относительно атмосферы; ДУАС, измеряющие направления обтекающих воздушных потоков; воздушные датчики (приемники воздушных давлений, датчики углов атаки и скольжения).
Блок ИУУ 6 представляет собой совокупность бортовых индикационно-управляющих устройств объекта, описанных в литературе, например [3], стр. 229-242, в число которых входят: система управления оружием (СУО), система индикации и отображения информации, система связи, система автоматического управления (САУ), система дистанционного управления (СДУ), система единой индикации и т.п.
Блок ОВК 7 обеспечивает определение взаимных координат между m-м МЛА группы и n-ми (n=1,...N, n≠m) МЛА группы. Блок ОВК 7 представляет собой совокупность радиолокационных, оптических, радионавигационных средств, обеспечивающих визирование каждого МЛА группы и измерение соответствующих расстояний, углов визирования и их производных. Принцип действия блока ОВК 7 аналогичен принципу действия блоков РТСН 1 и/или ОПС 2.
Блок СС 8 обеспечивает информационный обмен между ИУК всех МЛА группы. Блок представляет собой многоканальный комплекс средств связи (см. [3], стр. 241) для ведения устойчивой двусторонней связи членов экипажа с командно-диспетчерским пунктом и между ЛА в воздухе, а также для обмена тактической информацией между ЛА при ведении групповых действий.
Блоки МИОС 9 и МВИО 11 представляют собой известные (описанные, например, в книге [4], стр. 21-24, 394-406) линии связи и информационного обмена, например, по последовательному коду, по параллельному коду, мультиплексные и др.
Блок ВВУИО 12 представляет собой известное устройство (описанное, например, в книге [4], стр. 16-24, 386-406, 436-440) сопряжения вычислителя с линиями связи, осуществляющее прием, контроль и выдачу информации.
Блоки ФПС 13, КОИ 14, СПП 15, СПС 16, РПВД 17, АСП 18 выполнены, например, в виде однопроцессорных вычислителей ([4], стр. 31).
Каналы межбортового обмена КМБО 19 представляют собой, например, каналы ультракоротковолновой, коротковолновой радиосвязи, телекодовой связи ([3], стр. 241).
Блок ФПС 13 обеспечивает расчет параметров состояния МЛА, включающего в себя координаты, параметры движения и ориентации МЛА в целом и отдельных его точек относительно базовой системы отсчета, атмосферы, земной поверхности, ориентиров и т.п., на основе решения соответствующих уравнений, связывающих эти параметры с измеряемыми величинами, поступающими в магистраль МВИО 11 (см., например, книгу [1], стр. 7-8, 117-158, 171-283).
Блок КОИ 14 обеспечивает комплексную обработку информации систем путем формирования и последующего учета оценок погрешностей определения параметров состояния МЛА (см., например, книгу [1], стр. 40-81, 391-507).
Дополнительно введенный вычислительный блок СПП 15 обеспечивает расчет неизвестных и/или недоступных для измерений в текущий момент времени параметров геофизических полей, состояния атмосферы, подстилающей поверхности, движения ориентиров, целей и других взаимодействующих с группой МЛА объектов и т.п., используемых в алгоритмах комплекса.
Дополнительно введенный вычислительный блок СПС 16 обеспечивает синтез параметров состояния всех МЛА группы как функций от известных и доступных измерениям величин.
Дополнительно введенный вычислительный блок РПВД 17 обеспечивает расчет параметров взаимных движений всех МЛА группы.
Дополнительно введенный вычислительный блок АСП 18 обеспечивает аварийный синтез параметров для того МЛА, на котором он установлен, при отказе информационных устройств, входящих в состав ИУК этого МЛА. Аварийный синтез осуществляется на основе принятых по КМБО 19 от других МЛА, включенных в группу, данных о параметрах состояния аварийного МЛА.
Распределенный информационно-управляющий комплекс группы многофункциональных летательных аппаратов работает следующим образом.
Информационно-управляющие комплексы отдельных МЛА группы связаны между собой по каналам межбортового обмена КМБО 19 по принципу “каждый с каждым”. Работа ИУК отдельных МЛА аналогична и заключается в следующем.
Измеряемая информация о параметрах движения m-го (m=1,...N) МЛА J
В блоке ОВК 7 производится измерение параметров взаимных движений (координат, скоростей) МЛА группы: векторов ΔN
В блоке ФПС 13 производится обработка информации различных датчиков и систем в соответствии с общим уравнением (см., например [1], стр. 171-178, 189-195, 216-224, 225-229, 236-240, 316-327, 374-385):

где N
J
K
;
i - индекс, принимающий значения: ИДС (инерциальные датчики и системы), ВДС (воздушные датчики и системы), РТСН (радиотехнические средства навигации), ОПС (обзорно-прицельные средства), СОО (системы опознавания образов).
В блоке ФПС 13 определяются многомерные векторы N
В блоке КОИ 14 вычитанием из вектора корректируемой информации N

где  - прогнозируемое значение вектора Х в k-тый момент времени;
- прогнозируемое значение вектора Х в k-тый момент времени;
 - оценка значения вектора Х в k-тый момент времени.
- оценка значения вектора Х в k-тый момент времени.
Оценка  используется в блоке КОИ 14 для определения корректирующих поправок к многомерным векторам N
используется в блоке КОИ 14 для определения корректирующих поправок к многомерным векторам N
Информация о различных параметрах состояния объекта поступает из ВС 10 в магистраль МВИО 11, а оттуда - в блок ИУУ 6 для индикации и формирования соответствующих управляющих сигналов в САУ, СДУ, СУО.
На вход блока СС 8, подключенный к МИОС 9, из магистрали МИОС 9 поступает информация о величинах N
В блоке СПП 15 производится синтез неизвестных и/или недоступных для измерений в текущий момент времени параметров окружающего пространства, входящих в состав векторов К
Синтез величины J

где J
ℵi(Nn, Kn) (i=РТСН, ОПС, COO) - алгоритмы (операторы) преобразования информации, которые получаются из уравнений (1), разрешенных известными методами преобразования уравнений (описанными, например, в книге [5], стр. 142-162, 45-47: разложение неалгебраических функций в степенные ряды, линеаризацию нелинейных уравнений, решение систем линейных уравнений) относительно величин Ji (i=РТСН, ОПС, СОО) соответственно;
вектор Nn выбирается из числа доступных величин N
вектор Kn выбирается из числа доступных величин К
Синтез величины K

где K
;i(Nn, Jn) (i=ИДС, ВДС, РТСН, ОПС, СОО) - алгоритмы (операторы) преобразования информации, которые получаются из уравнений (1), разрешенных известными методами (описанными, например, в книге [5], стр. 142-162, 45-47) относительно величин К
вектор Nn выбирается из числа доступных величин N
вектор Jn выбирается из числа доступных величин J
При этом значения индекса “i” в правой и левой частях уравнений могут различаться. Синтезированные данные о векторах К
Введение в состав ВС 10 описанного блока СПП 15 обеспечивает N-кратное резервирование параметров окружающего пространства для каждого МЛА группы за счет привлечения к определению этих параметров ИУК всех МЛА группы, в результате чего существенно повышается надежность функционирования каждого МЛА группы.
В блоке СПС 16 производится синтез информации о многомерных векторах состояния остальных МЛА группы: N

производится синтез параметров состояния остальных МЛА группы. Здесь символом N
Введение в состав ВС 10 описанного блока СПС 16 обеспечивает N-кратное резервирование параметров состояния каждого МЛА группы за счет привлечения к определению этих параметров ИУК всех МЛА группы, в результате чего существенно повышается надежность функционирования каждого МЛА группы.
В блоке АСП 18 производится синтез параметров состояния своего МЛА в том случае, когда из-за отказа или отключения блоков РТСН 1, ОПС 1, COO 3, ИДС 4, ВДС 5 ИУК МЛА обычное определение векторов N

При этом обеспечивается возможность выполнения полетного задания этим МЛА, что повышает эффективность применения группы.
Введение в состав ВС 10 описанного блока АПС 18 обеспечивает синтез параметров состояния МЛА при отказах и отключениях измерительных датчиков и систем ИУК МЛА с помощью информации, поступающей от других МЛА группы. При этом обеспечивается надежная работа комплекса при отказах датчиков и систем, вследствие чего повышается эффективность применения группы.
В блоке РПВД 17 осуществляется расчет параметров взаимных движений МЛА в группе, т.е. векторов ΔN

производится расчет искомых величин ΔN
Введение в состав ВС 10 описанного блока РПВД 17 обеспечивает расчет параметров взаимных движений МЛА группы при невозможности непосредственных измерений этих величин из-за отказа или отключения блока определения взаимных координат ОВК 7. При этом обеспечивается непрерывность взаимной информационной поддержки ИУК отдельных МЛА группы и, как следствие, повышается надежность и эффективность работы группы.
Таким образом, на примерах технической реализации показано достижение технического результата в части расширения функциональных возможностей распределенного ИУК группы МЛА, а именно: повышение устойчивости к отказам и отключениям систем и комплексов отдельных МЛА группы и, как следствие, повышение эффективности применения группы оснащаемых им многофункциональных летательных аппаратов в целом и каждого МЛА в отдельности.
ЛИТЕРАТУРА
1. Бабич О.А. Обработка информации в навигационных комплексах. - М.: Машиностроение, 1991.
2. Ривкин С.С., Ивановский Р.И., Костров А.В. Статистическая оптимизация навигационных систем. - Л.: Судостроение, 1976.
3. Фомин А.В. Су-27. История истребителя. - М.: РА “Интервестник”, 2000.
4. Преснухин Л.Н., Нестеров П.В. Цифровые вычислительные машины. - М.: Высшая школа, 1981.
5. Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. - М.: Наука, 1977.
6. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся ВТУЗов. - М.: Наука, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2232376C1 |
| РАСПРЕДЕЛЕННЫЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ПОДВИЖНЫХ ОБЪЕКТОВ | 2003 |
|
RU2232377C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2009 |
|
RU2392198C1 |
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2263280C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2004 |
|
RU2263881C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ | 2000 |
|
RU2177897C1 |
| СИСТЕМА ПЛАНИРОВАНИЯ И ПОДГОТОВКИ ПОЛЕТНЫХ ЗАДАНИЙ ТАКТИЧЕСКОЙ ГРУППЫ САМОЛЕТОВ | 1999 |
|
RU2147141C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ | 2002 |
|
RU2212632C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2008 |
|
RU2360836C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434202C1 |
Изобретение относится к средствам решения задач навигации, управления и наведения для группы многофункциональных летательных аппаратов (МЛА). В состав комплекса входят объединенные посредством каналов межбортового информационного обмена в единую информационную сеть информационно-управляющие комплексы МЛА. Каждый из них содержит радиотехнические средства навигации, обзорно-прицельные средства, системы опознавания образов естественных и искусственных полей, инерциальные датчики и системы, воздушные (аэрометрические) датчики и системы, индикационно-управляющие устройства, блок определения взаимных координат, блок средств связи и вычислительную систему. Последняя в комплексе каждого МЛА группы решает задачи ввода-вывода информации и управления информационным обменом, расчета основных информационных параметров состояния и движения МЛА, комплексной обработки информации, а также дополнительно задачи хранения и обновления знаний об окружающем пространстве группы (геофизических полях, состоянии и движении атмосферы, ориентиров и т.п.) и взаимодействующих с группой объектах, синтеза параметров состояния любого МЛА и окружающего его пространства в режимах, когда обычное определение этих параметров затруднено или невозможно. В состав вычислительной системы входят объединенные магистралью вычислительного информационного обмена вычислительно-логические блоки ввода-вывода и управления информационным обменом, формирования параметров состояния МЛА (координат, скорости, ускорений, угловой ориентации относительно инерциального пространства, Земли, атмосферы, ориентиров и взаимодействующих объектов), комплексной обработки информации, поступающей от разных измерителей, синтеза параметров состояния и окружающего пространства, расчета параметров взаимного движения МЛА группы из величин, доступных в текущий момент времени. Вся информация о состоянии группы МЛА, полученная в комплексе любого МЛА группы, передается посредством каналов межбортового информационного обмена на все МЛА группы. Изобретение обеспечивает информационное единство распределенного комплекса группы МЛА, упрощает информационную интеграцию систем отдельных МЛА, обеспечивает непрерывное уточнение знаний о состоянии группы. При этом распределенный комплекс приобретает повышенную устойчивость к снижению качества и даже временному отсутствию информации систем и комплексов отдельных МЛА группы и обеспечивает надежное решение групповых задач в различных полетных ситуациях. 1 ил.
Распределенный информационно-управляющий комплекс группы многофункциональных летательных аппаратов, содержащий совокупность информационно-управляющих комплексов, размещенных на каждом многофункциональном летательном аппарате, входящем в группу, и взаимосоединенных между собой по принципу “каждый с каждым” по каналам межбортового обмена, причем каждый информационно-управляющий комплекс многофункционального летательного аппарата содержит взаимосоединенные входами-выходами по магистрали информационного обмена систем радиотехнические средства навигации, обзорно-прицельные средства, системы опознавания образов, инерциальные датчики и системы, воздушные датчики и системы, индикационно-управляющие устройства, блок определения взаимных координат, блок средств связи, число входов-выходов которого соответствует числу летательных аппаратов в группе, одним входом-выходом подключенный к магистрали информационного обмена систем, а другими входами-выходами связанный по каналам межбортового обмена с аналогичными входами-выходами блоков средств связи других информационно-управляющих комплексов многофункциональных аппаратов группы, вычислительную систему, включающую взаимосоединенные по магистрали вычислительного информационного обмена блок формирования параметров состояния, блок комплексной обработки информации, блок ввода-вывода и управления информационным обменом, другой вход-выход которого является входом-выходом вычислительной системы комплекса, отличающийся тем, что каждый информационно-управляющий комплекс многофункционального летательного аппарата группы дополнительно снабжен введенными в состав вычислительной системы комплекса блоком синтеза параметров информационного пространства, блоком синтеза параметров состояния, блоком аварийного синтеза параметров, блоком расчета параметров взаимных движений, подключенными к магистрали вычислительного информационного обмена вычислительной системы.
| Фомин А.В | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| История истребителя.-М.: РА “Интервестник”, 2000, с.229-232, 238-242 | |||
| БОРТОВОЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС МНОГОЦЕЛЕВОГО ДВУХМЕСТНОГО САМОЛЕТА | 2000 |
|
RU2166794C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ | 2000 |
|
RU2177897C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170409C1 |

