Изобретение относится к области приборостроения, а именно к бортовым цифровым вычислительным машинам (БЦВМ) и устройствам, обеспечивающим решение задач навигации и топопривязки, взаимосвязь управляющих и информационных систем наземных подвижных информационно-аналитических комплексов вооружений, проведение вычислительных процессов и представление индикационно-управляющих параметров экипажу в реальном текущем времени.
Известна бортовая цифровая вычислительная машина комплексов управления и навигации летательных аппаратов (см. патент №2392194 C1, МПК B64D 13/00, G01C 23/00, G06F 19/00, опубл. 20.06.2010 г.), принятая за прототип. Изобретение относится к области авиационного приборостроения, а именно к бортовым цифровым вычислительным машинам (БЦВМ) и устройствам, обеспечивающим взаимосвязь управляющих и информационных систем летательных аппаратов, проведение вычислительных процессов и представление индикационно-управляющих параметров экипажам в реальном текущем времени. Комплекс аппаратных средств, содержащий модуль центрального процессора, модуль периферийного процессора, модуль устройств памяти и модуль ввода-вывода, взаимосвязан по каналу информационно-вычислительного обмена с взаимодействующим бортовым и наземным оборудованием. Распределенный по их программируемым частям комплекс программно-алгоритмических средств, содержащий программно-алгоритмические модули системных вычислительно-логических средств и функциональных вычислительно-логических средств, взаимосвязанных по магистрали вычислительно-логического обмена, обеспечивает проведение вычислительных процедур и обмен с взаимодействующим бортовым и наземным оборудованием в реальном времени. Введение в состав БЦВМ программно-алгоритмического модуля адаптации и реконфигурации системных и функциональных вычислительно-логических средств расширяет функциональные возможности БЦВМ в части оптимизации ресурсов и обеспечения работоспособности при аппаратно-программных отказах и сбоях. В результате повышается эффективность использования комплексов управления и навигации и снабженных ими летательных аппаратов.
Недостатками прототипа являются:
- высокая конфигуративная сложность системы;
- недостаточные возможности по корректированию поступающей от датчиков, принцип действия которых основан на различных физических принципах, первичной информации;
- недостаточные возможности аналитического анализа обрабатываемой информации и ограниченный перечень решаемых сервисных задач;
- отсутствие возможности оборудования дополнительного количества автоматизированных компьютерных терминалов, позволяющих вести интенсивную информационно-аналитическую обработку параметров.
Предлагаемым изобретением решается задача по повышению эффективности и надежности информационно-аналитических комплексов наземных подвижных пунктов вооружений.
Технический результат, получаемый при осуществлении изобретения, заключается в создании программно-аппаратного комплекса топопривязчика, обеспечивающего прием и обработку информации, поступающей от соответствующих устройств топопривязчика, решение прямой и обратной геодезических задач, комплексирование навигационной информации, получаемой с датчиков, основанных на различных физических принципах, работу с цифровыми картами местности, возможность подготовки карт и передачи их потребителям, решение задач маршрутизации.
Указанный технический результат достигается тем, что в предлагаемом программно-аппаратном комплексе (ПАК) топопривязчика, содержащем комплекс аппаратных средств бортовой цифровой вычислительной машины (БЦВМ), устройства, обеспечивающие взаимосвязь с бортовым оборудованием, проведение вычислительных процессов и представление индикационно-управляющих параметров, программно-алгоритмические средства, новым является то, что связь комплекса аппаратных средств БЦВМ с бортовым оборудованием осуществляется через дополнительные согласующие модули: блок согласования, выполненный с возможностью обеспечения управления работой первичных навигационных датчиков и состоящий из центрального процессора, приемопередатчика интерфейса RS-232, приемопередатчика интерфейса радиального последовательного (ИРПС), модулей памяти, буферированного регистра разовых команд ввода-вывода и модуля питания, блока обработки данных, выполненного с возможностью приема информации от датчика температуры и измерителя цифрового атмосферного давления, ее преобразования и вычисления значения высоты, а также для выработки напряжения питания для датчиков и состоящего из четырех субблоков: контроллера, интерфейса, стабилизатора напряжения и инвертора, ПАК дополнительно оснащен вспомогательной ЭВМ, выполняющей задачи по хранению, отображению, обработке информации, комплекс программно-алгоритмических средств выполнен в виде специального программно-математического обеспечения, выполненного с возможностью решения прямой и обратной навигационных задач, комплексирования сигналов навигационных систем, работы с цифровыми электронными картами, поддержки интерфейса оператора, решения сервисных задач.
Осуществление связи комплекса аппаратных средств БЦВМ с бортовым оборудованием через дополнительные согласующие модули позволяет:
- обеспечить обработку навигационной информации, поступающей с датчиков, работа которых основана на различных физических принципах;
- упростить возможность дальнейшего комплексирования получаемой информации от различных датчиков.
Использование блока согласования для обеспечения управления работой первичных навигационных датчиков позволяет:
- обеспечить управление работой датчиков скорости механического и доплеровского;
- прием и первичную обработку (преобразование) информации, поступающей с них, передачу обработанных данных в ЭВМ по интерфейсу RS-232;
- выработку необходимых для работы датчиков напряжений питания.
Использование блока обработки данных, состоящего из четырех субблоков: контроллера, интерфейса, стабилизатора напряжения и инвертора, позволяет:
- вырабатывать вторичные стабилизированные напряжения питания, которые используются для питания субблока интерфейса, ДТ и ИЦАД;
- вырабатывать вторичные стабилизированное напряжение питания, используемые для питания субблоков контроллера и интерфейса, и нестабилизированное напряжение питания, подаваемое на субблок стабилизатора напряжения;
- производить преобразование физических и логических параметров выходных сигналов ДТ и ИЦАД и передачи преобразованных сигналов в цифровой форме в субблок контроллера;
- обеспечить прием преобразованных сигналов датчиков от субблока интерфейса, обработку информации, полученной от датчиков, вычисление высоты, передачу ее в БЦВМ через субблок интерфейса.
Дополнительное оснащение комплекса аппаратных средств БЦВМ вспомогательной ЭВМ позволяет:
- проводить организацию информационно-поисковых систем, создание базовых средств автоматизации индивидуального труда;
- осуществлять контроль информации, выработанной в процессе использования топопривязчика по назначению.
Выполнение комплекса программно-алгоритмических средств в виде специального программно-математического обеспечения позволяет обеспечить автоматизированное функционирование навигационной аппаратуры топопривязчика.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
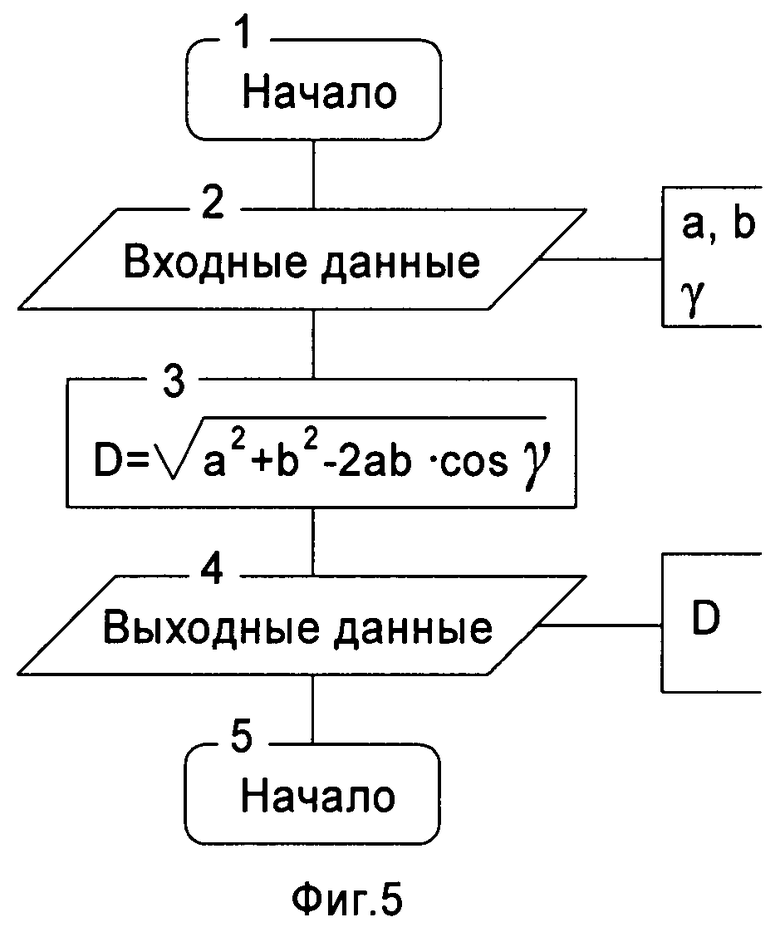
Сущность изобретения поясняется чертежами, где на фиг.1 показана структурная схема программно-аппаратного комплекса топопривязчика; на фиг.2 - структурная схема блока согласования; на фиг.3 - структурная схема блока обработки данных; фиг.4 - пример выполнения сервисной задачи - определение длины недоступного расстояния: схема для проведения расчетов способом с одной вспомогательной точкой; фиг.5 - пример выполнения сервисной задачи - определение длины недоступного расстояния: алгоритм для проведения расчетов способом с одной вспомогательной точкой; фиг.6 - пример выполнения сервисной задачи - определение длины недоступного расстояния: схема для проведения расчетов способом с двумя вспомогательными точками; фиг.7 - пример выполнения сервисной задачи - определение длины недоступного расстояния: алгоритм для проведения расчетов способом с двумя вспомогательными точками.
ПАК размещен на шасси топопривязчика и включает в себя бортовую цифровую вычислительную машину (БЦВМ) 1, клавиатуру (Кл) 2, манипулятор графической информации (МГИ) 3, устройство записи и передачи информации (УЗПИ) 4, переходное устройство (ПУ) 5, пульт дистанционного управления (ПДУ) 6, видеомонитор (ВМ) 7, устройство для чтения данных (УЧД) 8, хранящихся на лазерных компакт-дисках, устройство документирования УД 9. Связь БЦВМ 1 с бортовым оборудованием осуществляется через дополнительные согласующие модули. Блок согласования (БС) 10 связан с датчиком скорости механическим (ДСМ) 11 и датчиком скорости доплеровским (ДСД) 12, а блок обработки данных (БОД) 13 - с датчиком температуры (ДТ) 14 и измерителем цифровым атмосферного давления (ИЦАД) 15. БС 10 состоит из следующих основных узлов: центрального процессора (ЦП) 16, приемопередатчика (ПП) интерфейса RS-232 17, приемопередатчика (ПП) интерфейса ИРПС 18, аналого-цифрового преобразователя (АЦП) 19, энергонезависимой памяти (ЭНП) 20, оперативной памяти (ОП) 21, буферированного регистра разовых команд ввода-вывода (БРРК) 22, модуля питания (МП) 23. БОД 13 состоит из четырех субблоков: контроллера (СК) 24, интерфейса (СИф) 25, стабилизатора напряжения (ССН) 26 и инвертора (СИв) 27. ПАК дополнительно оснащен вспомогательной ЭВМ, выполненной в виде персональной портативной ЭВМ (ППЭВМ) 28. Комплекс программно-алгоритмических средств выполнен в виде специального программно-математического обеспечения (СПМО) 29. ПАК связан с бесплатформенной инерциальной навигационной системой (БИНС) 30 и с аппаратурой спутниковой навигации.
Кроме того, ПАК включает в себя системное программно-математическое обеспечение (СиПМО) 32.
ПАК функционирует следующим образом. Работа ПАК построена на обработке входных данных, поступающих с приборов и систем топопривязчика. Обработка данных осуществляется при помощи БЦВМ 1 с периферийными устройствами: Кл 2, МГИ 3, УЗПИ 4, ПДУ 6, ВМ 7, УЧД 8, УД 9.
Работа ПАК возможна в различных режимах, обеспечивающих использование топопривязчика по назначению, проведение контроля технического состояния приборов и систем, ввод и редактирование информации с Кл 2, вывод результатов на УД 9. МГИ 3 предназначен для управления курсором на экране ВМ 7, выполнен на базе сенсорной панели и является функциональным аналогом двухкнопочной мыши. УЗПИ 4 используется в качестве носимого электронного накопителя и обеспечивает запись, долговременное хранение и чтение данных. УЗПИ 4 представляет собой одноплатную носимую микро-ЭВМ с электронным диском, доступным для пользователей через интерфейсы RS-232 или Ethernet. ПУ 5 предназначено для использования в качестве устройства для подключения прибора УЗПИ 4 к рабочим станциям в составе стационарных и ввозимых объектов эксплуатации и организации питания прибора УЗПИ от сети постоянного тока с напряжением 27 В ±10%. ПДУ 6 предназначен для дистанционного включения и индикации режимов работы БЦВМ 1. ППЭВМ 28 выполняет задачи по хранению, отображению и обработке информации. Кроме того, на ППЭВМ 28 параллельно с БЦВМ 1 осуществляется решение различных сервисных задач, необходимых для топогеодезического обеспечения.
Данный режим обеспечивает выполнение различных математических расчетов для решения следующих задач:
а) преобразование геодезических координат в прямоугольные;
б) преобразование прямоугольных координат в геодезические;
в) перевычисление прямоугольных координат в смежную зону;
г) вычисление прямоугольных координат:
- прямая угловая засечка;
- обратная угловая засечка;
- линейная засечка;
- азимутальная засечка;
- линейно-азимутальная засечка;
- линейно-угловая засечка;
д) вычисление прямоугольных координат методом полигонометрических ходов:
- полигонометрический ход;
- система полигонометрических ходов;
- вычисление высотно-теодолитных ходов;
е) вычисление высоты:
- по сторонам прямых засечек и полигонометрического хода;
- по сторонам обратных засечек;
- метод геометрического нивелирования;
ж) преобразование азимута и дирекционного угла:
- переход от астрономического азимута к геодезическому и дир. углу;
- переход от дир. угла к геодезическому и астрономическому азимутам;
з) прямая и обратная геодезические задачи:
- прямая геодезическая задача;
- обратная геодезическая задача;
и) вычисление недоступного расстояния;
к) вычисление астрономического азимута по часовому углу солнца;
л) определение высоты геодезических знаков.
ВМ 7 предназначен для отображения цветной и знакографической информации. УЧД 9 предназначено для чтения данных, хранящихся на лазерных компакт-дисках, и выполнено как отдельное устройство, оснащенное источником питания от бортсети постоянного тока, вентилятором и амортизаторами.
Связь БЦВМ 1 с ДСМ 11 и ДСД 12 осуществляется через БС 10, а ДТ 14 и ИЦАД 15 - через БОД 13.
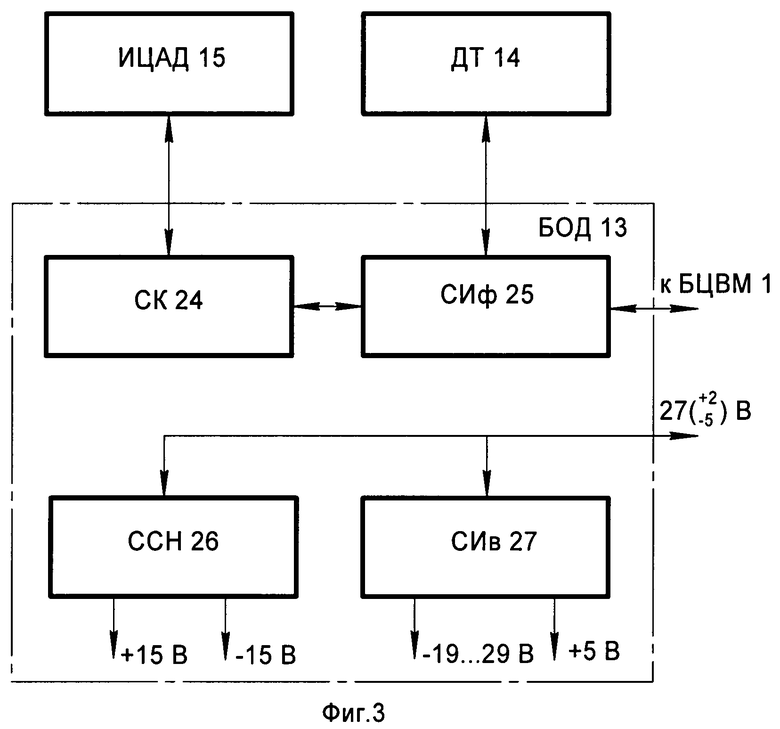
БОД 13 работает следующим образом. В БОД 13 производится вычисление высоты объекта (топопривязчика). Определение высоты основано на относительном методе измерения высоты точек местности, заключающемся в измерении атмосферного давления и температуры воздуха в измеряемой точке и в исходной (начальной) точке и вычислении по результатам измерений разности высот. БОД 13 предназначен для приема информации от ДТ 14 и ИЦАД 15, ее преобразования и вычисления значения высоты. Также в БОД 13 вырабатывается напряжение питания для ДТ 14 и ИЦАД 15.
ССН 26 вырабатывает вторичные стабилизированные напряжения питания +15 В и минус 15 В. На вход ССН 26 подаются напряжение бортсети величиной от 22 до 29 В и нестабилизированное напряжение от минус 19 до минус 29 В с выхода СИв 27. Выходные напряжения ССН 26 используются для питания СИф 25, ДТ 14 и ИЦАД 15.
СИв 27 вырабатывает вторичные стабилизированное напряжение питания +5 В и нестабилизированное напряжение питания от минус 19 до минус 29 В. На вход СИв 27 подается напряжение бортсети величиной от 22 до 29 В. Выходное стабилизированное напряжение +5 В используется для питания СК 24 и СИф 25, ДТ 14 и ИЦАД 15. Выходное нестабилизированное напряжение от минус 19 до минус 29 В подается на ССН 26.
СИф 25 предназначен для преобразования физических и логических параметров выходных сигналов ДТ 14 и ИЦАД 15 и передачи преобразованных сигналов в цифровой форме в СК 24. СИф 25 осуществляет также преобразование уровней напряжения интерфейса обмена с БЦВМ 1.
СК 24 обеспечивает прием преобразованных сигналов датчиков от СИф 25, обработку информации, полученной от датчиков, вычисление высоты, передачу ее в БЦВМ 1 через СИф 25.
БС 10 работает следующим образом. ЦП 16 осуществляет управление работой блока и позволяет производить обработку как аналоговой, так и цифровой информации в режиме реального времени.
ПП 17 интерфейса RS-232 служит для связи с БЦВМ 1 ПАК. ПП интерфейса ИРПС 18 обеспечивает прием информации от ИЦАД 15. АЦП 19 преобразует сигналы ДТ 14 в цифровой код. ЭНП 20 служит для хранения программы, а ОП 21 используется при ее выполнении. БРРК 22 обеспечивает прием сигналов датчиков и управление режимами их работы.
Данные, получаемые в БС 10 и БОД 13, используются при функционировании бесплатформенной инерциальной навигационной системы (БИНС) 30, взаимодействующей с БЦВМ 1.
Программно-математическое обеспечение ПАК включает в себя системное программно-математическое обеспечение (СиП-МО) 32 БЦВМ 1 и СпПМО 29. СпПМО 29 обеспечивает решение следующих основных задач:
- прямая и обратная навигационные задачи;
- комплексирование информации с построенных на различных физических принципах датчиков: ДСМ 11, ДСД 12, ДТ 14, ИЦАД 15, БИНС 30, и аппаратуры спутниковой навигации (АСН) 31;
- хранение, отображение и автоматическая прокладка маршрута на цифровой электронной карте;
- поддержка интерфейса оператора;
- выполнение специальных геодезических задач.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании программно-аппаратного комплекса топопривязчика, обеспечивающего прием и обработку информации, поступающей от соответствующих устройств топопривязчика, решение прямой и обратной геодезических задач, комплексирование навигационной информации, получаемой с датчиков, основанных на различных физических принципах, работу с цифровыми картами местности, возможность подготовки карт и передачи их потребителям, решение задач маршрутизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС | 2014 |
|
RU2573247C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| УНИВЕРСАЛЬНЫЙ ТОПОПРИВЯЗЧИК (УТП) НА БАЗЕ ЛЕГКОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2009 |
|
RU2413637C1 |
| ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА ДИСТАНЦИОННО-УПРАВЛЯЕМОГО ПОДВИЖНОГО ОБЪЕКТА | 2013 |
|
RU2532603C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОЕВОЙ РОБОТИЗИРОВАННОЙ ПЛАТФОРМОЙ | 2013 |
|
RU2544740C1 |
| БОРТОВАЯ ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНО-УПРАВЛЯЮЩАЯ СИСТЕМА ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2414390C1 |
| Программно-аппаратные средства комплекса топопривязки и навигации | 2016 |
|
RU2640316C1 |
| Автоматизированная система навигации с контролем целостности навигационных данных спутниковых радионавигационных систем по информации бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2642151C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ С КОНТРОЛЕМ ЦЕЛОСТНОСТИ НАВИГАЦИОННЫХ ДАННЫХ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2014 |
|
RU2565834C1 |




Изобретение относится к области приборостроения, а именно к бортовым цифровым вычислительным машинам (БЦВМ). Технический результат - расширение функциональных возможностей. Для достижения данного результата программно-аппаратный комплекс размещен на шасси топопривязчика и включает в себя бортовую цифровую вычислительную машину (БЦВМ), клавиатуру (Кл), манипулятор графической информации (МГИ), устройство записи и передачи информации (УЗПИ), переходное устройство (ПУ), пульт дистанционного управления (ПДУ), видеомонитор (ВМ), устройство для чтения данных (УЧД), хранящихся на лазерных компакт-дисках, устройство документирования (УД). Связь БЦВМ с бортовым оборудованием осуществляется через дополнительные согласующие модули. Блок согласования (БС) связан с датчиком скорости механическим (ДСМ) и датчиком скорости доплеровским (ДСД), а блок обработки данных (БОД) - с датчиком температуры (ДТ) и измерителем цифровым атмосферного давления (ИЦАД). БС состоит из центрального процессора (ЦП), приемопередатчика (ПП) интерфейса RS-232, приемопередатчика (ПП) интерфейса ИРПС, аналого-цифрового преобразователя (АЦП), энергонезависимой памяти (ЭНП), оперативной памяти (ОП), буферированного регистра разовых команд ввода-вывода (БРРК), модуля питания (МП). 7 ил.
Программно-аппаратный комплекс топопривязчика, содержащий комплекс аппаратных средств бортовой цифровой вычислительной машины (БЦВМ), устройства, обеспечивающие взаимосвязь с бортовым оборудованием, проведение вычислительных процессов и представление индикационно-управляющих параметров, программно-алгоритмические средства, отличающийся тем, что связь комплекса аппаратных средств БЦВМ с бортовым оборудованием осуществляется через дополнительные согласующие модули: блок согласования, выполненный с возможностью обеспечения управления работой первичных навигационных датчиков и состоящий из центрального процессора, приемопередатчика интерфейса RS-232, приемопередатчика интерфейса радиального последовательного (ИРПС), модулей памяти, буферированного регистра разовых команд ввода-вывода и модуля питания, блока обработки данных, выполненного с возможностью приема информации от датчика температуры и измерителя цифрового атмосферного давления, ее преобразования и вычисления значения высоты, а также для выработки напряжения питания для датчиков и состоящего из четырех субблоков: контроллера, интерфейса, стабилизатора напряжения и инвертора, программно-аппаратного комплекса (ПАК), дополнительно оснащен вспомогательной ЭВМ, выполняющей задачи по хранению, отображению, обработке информации, комплекс программно-алгоритмических средств выполнен в виде специального программно-математического обеспечения, выполненного с возможностью решения прямой и обратной навигационных задач, комплексирования сигналов навигационных систем, работы с цифровыми электронными картами, поддержки интерфейса оператора, решения сервисных задач.
| БОРТОВАЯ ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА КОМПЛЕКСОВ УПРАВЛЕНИЯ И НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2009 |
|
RU2392194C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ СВЕРХЗВУКОВОГО НИЗКОЛЕТЯЩЕГО ОБЪЕКТА ПО СЛЕДУ НА МОРСКОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2419105C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ПАРАМЕТРОВ ДВИЖЕНИЯ НИЗКОЛЕТЯЩЕГО НАД МОРСКОЙ ПОВЕРХНОСТЬЮ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО ШИРИНЕ СЛЕДА НА МОРСКОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2396575C1 |
| US 3887923 A1, 03.06.1975 | |||
| US 5331326 A1, 19.07.1994. | |||

