Изобретение относится к области радиолокации и предназначено для решения широкого круга задач при использовании на борту беспилотных летательных аппаратов (БЛА) самолетного и вертолетного типов, в том числе малоразмерных.
Известны многофункциональные малогабаритные радиолокационные системы (РЛС) с синтезированием апертуры антенны для летательных аппаратов (ЛА) (см., например, патент RU2496120 от 30.12.2011 г. МПК G01S 13/90 и патент RU2630278 от 27.06.2016 г. МПК G01S 13/90), предназначенные для обнаружения и наблюдения наземных неподвижных радиоконтрастных и движущихся объектов, картографирования с реальным лучом и синтезированием апертуры антенны, селекции наземных движущихся объектов, информационного обеспечения маловысотного полета, измерения наклонной дальности и оценки метеообстановки. Наиболее близкой к заявляемому является многофункциональная малогабаритная радиолокационная система для летательных аппаратов (патент RU2630278 от 27.06.2016 г. МПК G01S 13/90). Однако, данная РЛС имеет следующие недостатки:
 не решена задача гарантированного обеспечения получения радиолокационного изображения (РЛИ) поверхности земли с детальным разрешением в реальном масштабе времени на борту ЛА в требуемом диапазоне его скоростей;
не решена задача гарантированного обеспечения получения радиолокационного изображения (РЛИ) поверхности земли с детальным разрешением в реальном масштабе времени на борту ЛА в требуемом диапазоне его скоростей;
не обеспечиваются требуемые быстродействие и точность выставки луча в заданном направлении приводом антенны;
не обеспечивается требуемая точность привязки РЛИ к заданной геодезической системе координат.
Технической задачей изобретения является создание многофункционального малогабаритного радиолокатора с синтезированием апертуры антенны (МРСА) Ku-диапазона длин радиоволн, обеспечивающего в реальном масштабе времени на борту БЛА формирование целевой информации, включая радиолокационные изображения с детальным разрешением, и ее точную привязку к заданной геодезической системе координат. Предлагаемый МРСА функционирует в следующих режимах:
 картографирование реальным лучом антенны,
картографирование реальным лучом антенны,
 картографирование с синтезированием апертуры антенны и линейным разрешением до 0,3 м,
картографирование с синтезированием апертуры антенны и линейным разрешением до 0,3 м,
 селекция низкоскоростных наземных (надводных) движущихся целей,
селекция низкоскоростных наземных (надводных) движущихся целей,
 селекция высокоскоростных наземных (надводных) движущихся целей,
селекция высокоскоростных наземных (надводных) движущихся целей,
 оценка метеообстановки,
оценка метеообстановки,
 измерение наклонной дальности до земной поверхности,
измерение наклонной дальности до земной поверхности,
 информационное обеспечение маловысотного полета,
информационное обеспечение маловысотного полета,
 радиомониторинг,
радиомониторинг,
 встроенная система контроля.
встроенная система контроля.
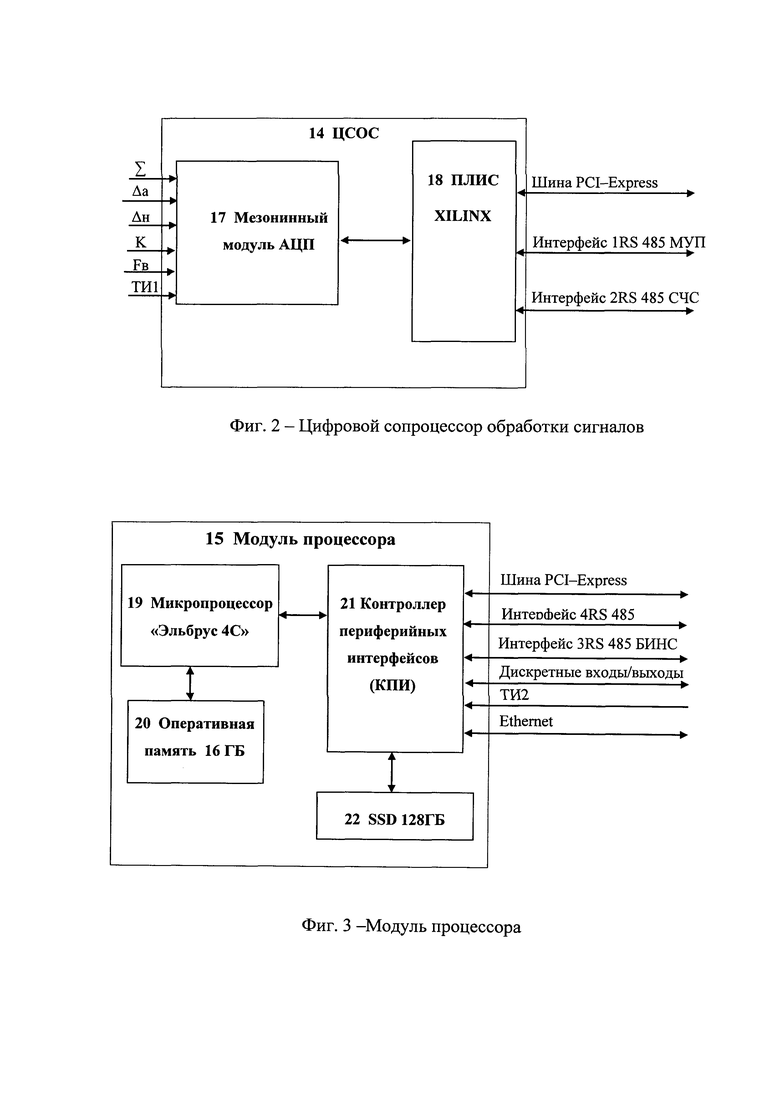
Решение поставленной задачи достигается тем, что многофункциональный малогабаритный радиолокатор с синтезированием апертуры антенны содержит (см. фиг. 1) радиолокационный модуль (РЛМ) 1, включающий антенный модуль (AM) 2 в составе антенной сборки (АС) 3, содержащей волноводно-щелевую антенную решетку (ВЩАР) 4 с установленными на ней циркулятором 5 и конвертором 6, модуля управления приводами (МУП) 7 и приводов азимута (ПА) 8 и наклона (ПН) 9, а также модуль приемопередатчика (ПП) 10 в составе ПЧ-приемника и синтезатора частот и синхросигналов управления (СЧС) 11 и модуль передатчика (ПРД) 12, содержащий высокочастотный усилитель мощности (ВУМ), коммутатор и нагрузку, и бортовую цифровую вычислительную машину (БЦВМ) 13 с программным обеспечением (ПО) 16. При этом ВЩАР, конвертор, ПЧ-приемник и ПРД выполнены по патенту RU 2 630 278 от 27.06.2016 г. МПК G01S 13/90, МУП 7 реализован с использованием программируемой логической интегральной схемы (ПЛИС), выполняющей функции управления, обработки, приема и выдачи информации по быстродействующему (3 Мб/сек) интерфейсу управления 1RS 485, СЧС 11 реализован с использованием ПЛИС, выполняющей функции управления, обработки, приема и выдачи информации по быстродействующему (3 Мб/сек) интерфейсу управления 2RS 485. БЦВМ 13 выполнена двухмодульной, состоящей из цифрового сопроцессора обработки сигналов (ЦСОС) 14 (см. фиг.2), реализованного на модуле носителя мезонинов с установленными на нем мезонинном модуле аналого-цифрового преобразователя (АЦП) 17 и ПЛИС 18, выполняющей функции:
 формирование квадратур отсчетов;
формирование квадратур отсчетов;
 децимация;
децимация;
 фильтрация;
фильтрация;
 преобразование целого числа в число с плавающей точкой;
преобразование целого числа в число с плавающей точкой;
 передача данных по внутренней шине PCI-Express;
передача данных по внутренней шине PCI-Express;
 обмен данными с МУП по интерфейсу 1RS 485;
обмен данными с МУП по интерфейсу 1RS 485;
 обмен данными с СЧС по интерфейсу 2RS 485, и из модуля процессора (МП) 15 (см. фиг. 3), реализованного с использованием микропроцессора «Эльбрус 4С» 19, оперативной памяти 16 ГБ 20, микросхемы контроллера периферийных интерфейсов (КПИ) 21, обеспечивающей обмен информацией с бортовым радиоэлектронным оборудованием (БРЭО) (см. фиг.1), и электронного диска (SSD) 128 ГБ 22.
обмен данными с СЧС по интерфейсу 2RS 485, и из модуля процессора (МП) 15 (см. фиг. 3), реализованного с использованием микропроцессора «Эльбрус 4С» 19, оперативной памяти 16 ГБ 20, микросхемы контроллера периферийных интерфейсов (КПИ) 21, обеспечивающей обмен информацией с бортовым радиоэлектронным оборудованием (БРЭО) (см. фиг.1), и электронного диска (SSD) 128 ГБ 22.
Изобретение поясняется чертежами, где:
- на фигуре 1 изображена структурная схема многофункционального малогабаритного радиолокатора с синтезированной апертурой антенны;
- на фигуре 2 изображена структурная схема цифрового сопроцессора обработки сигнала;
- на фигуре 3 изображена структурная схема модуля процессора БЦВМ.
На фигурах. 1-3 обозначено:
1. Радиолокационный модуль (РЛМ);
2. Антенный модуль (AM);
3. Антенная сборка (АС);
4. Волноводно-щелевая антенная решетка (ВЩАР) Ku-диапазона радиоволн;
5. Циркулятор;
6. Конвертор Ku-диапазона радиоволн;
7. Модуль управления приводом (МУП);
8. Привод азимута (ПА);
9. Привод наклона (ПН);
10. Модуль приемопередатчика (ПП);
11. Синтезатор частот и синхросигналов управления (СЧС);
12. Передатчик Ku-диапазона радиоволн (ПРД);
13. Бортовая цифровая вычислительная машина (БЦВМ);
14. Цифровой сопроцессор обработки сигналов (ЦСОС);
15. Модуль процессора (МП);
16. Программное обеспечение (ПО);
17. Мезонинный модуль АЦП;
18. ПЛИС ЦСОС;
19. Микропроцессор «Эльбрус 4С»;
20. Оперативная память;
21. Контроллер периферийных интерфейсов (КПИ);
22. Электронный диск (SSD);
ЗС - зондирующий сигнал;
Σ - суммарный канал;
Δа - разностный канал по азимуту;
Δн - разностный канал по наклону;
К - компенсационный канал;
ИЗО - импульс зоны отпирания конвертора;
FГ - сигнал первого гетеродина;
ИЗП - импульс запуска передатчика;
F0 - сигнал несущей частоты;
FB - сигнал дискретизации;
TИ1 - сигнал тактового интервала 1;
ТИ2 - сигнал тактового интервала 2;
СЕВ - система единого времени. Требуемый результат достигается за счет разработки архитектуры и конструкции МРСА с использованием высокопроизводительных вычислительных средств и интерфейсов, позволяющих разработать программное обеспечение (ПО) и создать комплекс взаимодействующих подсистем, функционирующих в режиме жесткого реального времени:
- подсистему управления временной диаграммой работы МРСА, состоящую из БЦВМ и СЧС, взаимодействующих по быстродействующему (3 Мбит/с) интерфейсу 2RS 485;
- приемо-задающую подсистему, включающую БЦВМ и ПП, содержащий СЧС;
- подсистему обработки сигналов, включающую в свой состав БЦВМ, ПП и АС;
- передающую подсистему, включающую СЧС, ПРД и АС;
- подсистему управления положением луча антенны, включающую в свой состав БЦВМ и МУП, взаимодействующих по быстродействующему (3 Мбит/сек) интерфейсу 1RS 485;
- подсистему навигационного обеспечения, состоящую из БЦВМ и высокоточной бесплатформенной инерциальной навигационной системы (БИНС), взаимодействующих по интерфейсам 3RS 485 и 4RS 485;
- подсистему телеметрии, охватывающую все модули МРСА и фиксирующую информацию о состоянии модулей на электронном диске SSD модуля процессора (см. фиг. 3).
МРСА работает в активном режиме, при этом работают все вышеперечисленные подсистемы, и в пассивном режиме, при этом не работает передающая подсистема, остальные подсистемы работают.
Функционирование МРСА осуществляется под управлением программного обеспечения 16, загружаемого в оперативную память 20 модуля процессора 15 БЦВМ 13 и программного обеспечения, встроенного в ПЛИС ЦСОС 14, ПЛИС СЧС 11 и ПЛИС МУП 7 (см. фиг. 1), для чего модуль процессора (МП) 15 соединен по шине PCI - Express с ЦСОС 14, который по последовательным быстродействующим каналам 1RS 485 и 2RS 485 соединен соответственно с МУП 7 и СЧС 11, который тактирует и синхронизирует работу аппаратных и программных модулей, выдавая тактирующие импульсы ТИ1, ТИ2, сигнал частоты выборок (Fb) и синхронизирующие сигналы импульса запуска передатчика (ИЗП) в ПРД 12 и импульса зоны отпирания конвертора (ИЗО) в конвертор 6. По включению питания БЦВМ 13 безусловно запускает диспетчер режима встроенного контроля, который в свою очередь запускает программные модули подрежима расширенного контроля МРСА, при положительном результате контроля запускается операционная система (ОС) и драйверы поддержки интерфейсов. ОС по приходу сигнала тактового интервала ТИ2 инициирует диспетчер функционального ПО и диспетчер режимов ПО, которые формируют управляющую информацию для выдачи в ПЛИС ЦСОС 14, ПЛИС СЧС 11 и ПЛИС МУП 7. При этом комплекс взаимодействующих подсистем управления и обработки информации функционирует следующим образом. Программное обеспечение 16 БЦВМ 13 подсистемы управления временной диаграммой работы МРСА формирует общую и частные (режимов) временные диаграммы и управляет СЧС 11, который выдает соответственно в ПРД 12 управляющий сигнал импульса запуска передатчика (ИЗП) и несущую частоту F0 и управляющий сигнал импульса зоны отпирания (ИЗО) и сигнал первого гетеродина Fг в конвертор 6. ПРД 12 формирует зондирующий сигнал (ЗС), который поступает на циркулятор 5 и далее на суммарный «вход-выход» ВЩАР 4, которая излучает ЗС в пространство. ВЩАР 4 принимает отраженный сигнал и формирует суммарный сигнал Σ, который через циркулятор 5 поступает на конвертор 6, и формирует разностный сигнал по азимуту Δа, разностный сигнал по наклону Δн и компенсационный сигнал, поступающие на конвертор 6. С выхода конвертора 6 преобразованные сигналыΣ, Δа, Δн и K передаются на усилитель промежуточной частоты модуля приемопередатчика 10 и далее на ЦСОС 14, где производится оцифровка и предварительная обработка радиолокационных сигналов, результаты которой по высокоскоростной шине PCI -Express поступают в МП 15, где производится программными модулями ПО 16 первичная и вторичная обработка с использованием навигационных данных, поступающих по каналам 3RS 485 и 4RS 485, в соответствии с командами, поступающими из БРЭО. Одновременно производится управление перемещением ВЩАР 4 для выполнения полосового, секторного и телескопического обзоров, для чего ПО 16 БЦВМ 13 формирует управляющие сигналы, которые по быстродействующему интерфейсу 1RS 485 поступают на МУП 7 и далее на привод А 8 и привод Н 9.
Управление МРСА осуществляется от БРЭО БЛА в соответствии с полетным заданием с возможностью оперативного изменения полетного задания (режимов работы МРСА) по командам с наземного пункта управления (НПУ). Сформированная целевая информация выдается из МРСА в БРЭО БЛА для дальнейшей передачи по радиоканалу на НПУ для решения оперативно-тактических задач.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональная интегрированная двухдиапазонная радиолокационная система для летательных аппаратов | 2016 |
|
RU2621714C1 |
| Многофункциональный бортовой радиолокационный комплекс | 2017 |
|
RU2670980C9 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2019 |
|
RU2718739C1 |
| Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолетных систем | 2018 |
|
RU2696274C1 |
| Многофункциональная малогабаритная радиолокационная система для летательных аппаратов | 2016 |
|
RU2630278C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| Многоканальный аппаратно-программный комплекс высокоскоростной цифровой обработки сигналов | 2018 |
|
RU2714493C2 |
| Способ и система для контроля радиолокационной станции | 2016 |
|
RU2648585C1 |
| Бортовая система беспилотного летательного аппарата (БЛА) с автономной коррекцией координат | 2018 |
|
RU2703806C1 |
| БОРТОВАЯ АППАРАТУРА МЕЖСПУТНИКОВЫХ ИЗМЕРЕНИЙ (БАМИ) | 2012 |
|
RU2504079C1 |

Изобретение относится к области радиолокации и предназначено для решения широкого круга задач при использовании на борту беспилотных летательных аппаратов (БЛА). Техническим результатом является создание радиолокатора с синтезированной апертурой антенны (МРСА) Ku-диапазона длин радиоволн, обеспечивающего на борту БЛА формирование целевой информации и ее точную привязку к геодезической системе координат. Он достигается за счет разработки системы, в состав которой входят: подсистема управления временной диаграммой работы, включающей бортовую цифровую вычислительную машину (БЦВМ), синтезатор частот и сихросигналов управления (СЧС); приемо-задающая подсистема, включающая БЦВМ, модуль приемопередатчика, содержащий СЧС, и антенную сборку (АС); подсистема процессорной обработки сигналов; передающая подсистема; подсистема управления положением луча антенны, включающая в свой состав привод азимута, привод наклона; подсистема навигационного обеспечения; подсистемы телеметрии. 3 ил.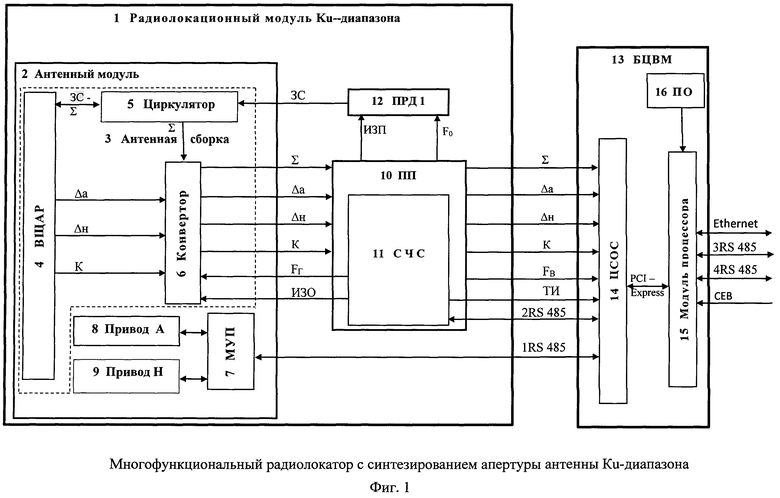
Малогабаритный многофункциональный радиолокатор с синтезированием апертуры антенны (МРСА) Ku-диапазона длин радиоволн для беспилотных летательных аппаратов, содержащий радиолокационный модуль (РЛМ), включающий антенный модуль (AM) в составе антенной сборки (АС), содержащей волноводно-щелевую антенную решетку (ВЩАР) с установленными на ней циркулятором и четырехканальным конвертором, модуля управления приводами (МУП) и приводов азимута (ПА) и наклона (ПН), а также модуль приемопередатчика (ПП) в составе ПЧ-приемника и синтезатора частот и синхросигналов управления (СЧС) и модуль передатчика (ПРД), и бортовую цифровую вычислительную машину (БЦВМ) с загружаемым программным обеспечением (ПО), отличающийся тем, что в МРСА создан путем применения быстродействующих интерфейсов, программируемых логических интегральных схем (ПЛИС) и разработки ПО комплекс взаимодействующих подсистем управления и обработки радиолокационной и навигационной информации, функционирующий в жестком реальном времени и обеспечивающий получение целевой информации, включая радиолокационное изображение (РЛИ) поверхности земли с детальным разрешением, с требуемой точностью привязки РЛИ к заданной геодезической системе координат, при этом БЦВМ выполнена двухмодульной и состоящей из модуля процессора (МП), реализованного с использованием микропроцессора «Эльбрус 4С», оперативной памяти 16 ГБ, микросхемы контроллера периферийных интерфейсов (КПИ) и модуля цифрового сопроцессора обработки сигналов (ЦСОС), реализованного на модуле носителей мезонинов с установленными на нем мезонинном модуле аналого-цифрового преобразования и ПЛИС, выполняющей функции обработки радиолокационных сигналов и обмена данными с МУП по интерфейсу 1 RS 485 и с СЧС по интерфейсу 2 RS 485, МУП выполнен с использованием ПЛИС, реализующей функции управления, обработки, приема и выдачи информации по быстродействующему интерфейсу 1 RS 485, СЧС выполнен с использованием ПЛИС, реализующей функции управления, обработки, приема и выдачи информации по быстродействующему интерфейсу 2 RS 485, при этом комплекс взаимодействующих подсистем управления и обработки информации МРСА функционирует следующим образом, программное обеспечение 16 БЦВМ 13 подсистемы управления временной диаграммой работы МРСА управляет СЧС 11, который выдает соответственно в ПРД 12 управляющий сигнал импульса запуска передатчика (ИЗП) и несущую частоту F0 и в конвертор 6 управляющий сигнал импульса зоны отпирания конвертора (ИЗО) и сигнал первого гетеродина Fг, ПРД 12 формирует зондирующий сигнал (ЗС), который поступает на циркулятор 5 и далее на суммарный «вход-выход» ВЩАР 4, которая излучает ЗС в пространство, ВЩАР 4 принимает отраженный сигнал и формирует суммарный сигнал Σ, который через циркулятор 5 поступает на конвертор 6, и формирует разностный сигнал по азимуту Δа, разностный сигнал по наклону Δн и компенсационный сигнал К, поступающие на конвертор 6, с выхода которого преобразованные сигналы Σ, Δа, Δн и К передаются на усилитель промежуточной частоты модуля приемопередатчика (ПП) 10 и далее на ЦСОС 14, где производится оцифровка и предварительная обработка радиолокационных сигналов, результаты которой по высокоскоростной шине PCI - Express поступают в МП 15, где производится программными модулями ПО 16 первичная и вторичная обработка в жестком реальном времени с использованием навигационных данных, поступающих по каналам 3 RS 485 и 4 RS 485, и в соответствии с командами, поступающими из бортового радиоэлектронного оборудования (БРЭО), одновременно производится управление перемещением ВЩАР 4 для выполнения полосового, секторного и телескопического обзоров, для чего ПО 16 БЦВМ 13 формирует управляющие сигналы, которые по быстродействующему интерфейсу 1 RS 485 поступают на МУП 7 и далее на привод А 8 и привод Н 9, при этом управление МРСА осуществляется от БРЭО БЛА в соответствии с полетным заданием с возможностью оперативного изменения полетного задания по командам с наземного пункта управления (НПУ), при этом сформированная целевая информация выдается из МРСА в БРЭО БЛА для дальнейшей передачи по радиоканалу на НПУ для решения оперативно-тактических задач.
| Многофункциональная малогабаритная радиолокационная система для летательных аппаратов | 2016 |
|
RU2630278C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| ПОДВИЖНЫЙ РАДИОЛОКАТОР | 2014 |
|
RU2572094C1 |
| US 6362777 B1, 26.03.2002. | |||

