Изобретение относится к области грузоподъемной техники, а именно к ограничителям предельного груза для подъемников (вышек). Ограничители предельного груза (ОПГ) являются приборами безопасности и служат для ограничения вертикальной нагрузки на люльку подъемника с целью защиты ее от перегрузки и с целью защиты подъемника от опрокидывания.
Одним из главных элементов ОПГ является датчик нагрузки в люльке. При этом датчик нагрузки ОПГ устанавливается таким образом, чтобы измерять только вертикальную нагрузку на люльку, а не момент от вертикальной нагрузки. Датчик должен достоверно измерять вертикальную нагрузку в люльке, независимо от точки приложения этой нагрузки к полу люльки.
Для этого датчик нагрузки устанавливается в специальный модуль встройки, который одновременно является соединительным звеном между люлькой и стрелой подъемника. Причем модуль воспринимает на себя все нагрузки, действующие на люльку кроме вертикальной (горизонтальные нагрузки, моменты во всех плоскостях). А датчик нагрузки воспринимает на себя и измеряет только вертикальную составляющую нагрузки на модуль.
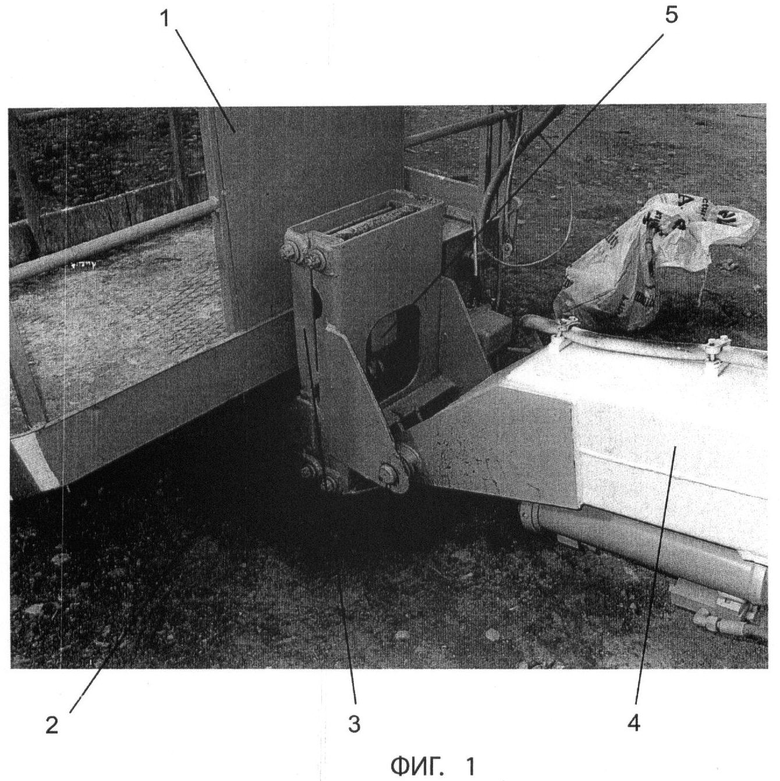
В качестве ближайшего аналога может быть принят модуль встройки датчика нагрузки ОПГ, используемый, например, на подъемнике АГП-18.04, и построенный по принципу параллелограмма (см. фиг.1).
Представленный на фиг.1 модуль встройки датчика нагрузки ОПГ выполнен в виде корпуса из двух металлических вертикальных половин корпуса 1 и 2, соединенных между собой горизонтальными тягами 3 (коромыслами) с цилиндрическими шарнирами 4 (подшипниками скольжения), установленными на каждой из половин корпуса в верхней и нижней их части. Половина 1 корпуса закрепляется на стреле подъемника, а половина 2 закрепляется на кронштейне люльки.
Кинематически модуль с шарнирами представляет собой подвижный параллелограмм, поэтому половины 1 и 2 могут перемещаться относительно друг друга в вертикальном направлении. Их перемещение относительно друг друга ограничивается датчиком нагрузки 5, закрепленным на каждой из них.
Датчик 5 ограничивает вертикальное перемещение указанных половин корпуса и воспринимает только вертикальную составляющую нагрузки, действующей на модуль и соответственно на люльку. Учитывая, что пол люльки всегда ориентирован горизонтально, эта нагрузка равна весу люльки плюс вес груза, находящегося в люльке, независимо от места его установки в люльке. В соответствии с требованиями безопасности сигнал с датчика поступает в электронный ограничитель предельного груза, который при перегрузке люльки выдает релейный сигнал запрещения работы подъемника.
Недостатком данной конструкции модуля встройки датчика нагрузки является наличие шарниров (подшипников скольжения), нагрузка на которые зависит от веса люльки, помещенного в нее груза, а также геометрических параметров люльки и элементов ее крепления. Под нагрузкой в люльке шарниры модуля нагружаются нагрузкой и в шарнирах появляется трение (момент трения). Трение в шарнирах приводит к механическим потерям в кинематической схеме модуля, за счет чего снижается коэффициент полезного действия механизма, что отрицательно влияет на точность измерения нагрузки в люльке датчиком.
Как правило, подъемник монтируется на транспортном средстве (например, на автомобиле) и в транспортном режиме, особенно при движении по неровным дорогам, происходит дополнительное трение и износ шарниров модуля из-за микроперемещений. Износ шарнирных соединений приводит к повышенным зазорам в них и, как следствие, к перекосам в модуле, что дополнительно приводит к повышенному трению в них. А повышенное трение отрицательно влияет на точность измерения вертикальной нагрузки в люльке датчиком.
Другим недостатком известной конструкции является тот факт, что наличие только микроперемещений в шарнирах приводит к их «закисанию» и потере подвижности, что также приводит к потере точности измерения нагрузки в люльке и нарушает работу датчика ограничителя предельного груза.
Вышеуказанные недостатки конструкции модуля приводят к тому, что погрешность измерения вертикальных нагрузок датчиком составляет до 30% и зависит от наличия или отсутствия смазки в шарнирах, ее состояния в зависимости от температуры окружающей среды, наличия коррозии и износа в шарнирных соединениях модуля и т.д.
Данные недостатки конструкции модуля могут приводить к перегрузке подъемников и, как следствие, к нарушению условий их безопасной эксплуатации.
Задачей изобретения является создание надежного механизма модуля встройки датчика нагрузки ОПГ, позволяющего увеличить ресурс работы модуля и повысить точность измерения нагрузки.
Поставленная задача достигается тем, что модуль встройки датчика нагрузки ограничителя предельного груза содержит корпус, выполненный из двух скрепленных между собой вертикальных половин корпуса, и внутри которого размещен датчик вертикальной нагрузки, прикрепленный к указанным половинам. При этом указанные половины корпуса скреплены друг с другом посредством упругих пластин таким образом, чтобы указанные упругие пластины воспринимали на себя все нагрузки, действующие на указанный модуль, кроме вертикальной, при этом датчик вертикальной нагрузки закреплен к указанным половинам корпуса так, чтобы воспринимать на себя только вертикальную нагрузку.
Предпочтительно, чтобы указанный датчик был прикреплен к указанным половинам корпуса с возможностью осуществления предварительного натяга.
Кроме того, корпус может быть оснащен страховочными винтами на случай разрушения упругих пластин или ослабления их крепления. При этом одним концом каждый страховочный винт ввернут в одну половину корпуса, а другой конец страховочного винта размещен в другой половине корпуса с зазором по отношению к указанной другой половине корпуса.
В конструкции заявленного модуля шарнирное соединение половин корпуса в виде тяг с подшипниками скольжения заменено на соединение высокопрочными упругими пластинами. Указанное соединение осуществляется в верхней и в нижней части указанных двух половин корпуса с помощью болтов. Для повышения безопасности, в случае поломки упругих пластин, в конструкцию добавлены специальные страховочные винты.
Упругие пластины устанавливаются либо по одной, либо пакетом по несколько штук, исходя из условий прочности.
Главное требование к упругим пластинам, чтобы они позволяли половинам корпуса модуля иметь возможность вертикального перемещения относительно друг друга, достаточного, чтобы датчик нагрузки мог воспринимать и измерять вертикальную нагрузку на люльку (модуль).
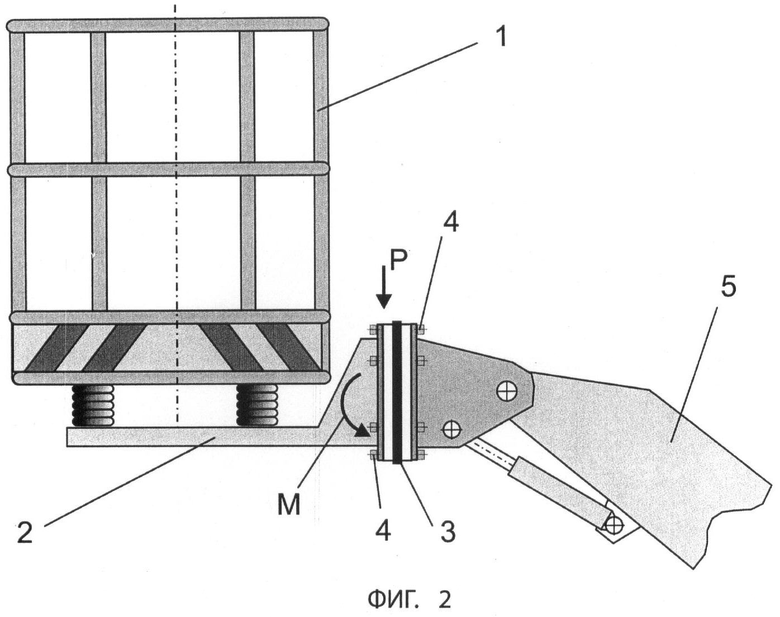
Изобретение иллюстрируется чертежом, где на фиг.2 показана схема установки предлагаемого модуля встройки на подъемнике, а на фиг.3-5 представлены проекции модуля встройки датчика ОПГ.
Люлька с помощью кронштейна люльки с фланцем крепится болтами к модулю встройки датчика, который с другой стороны крепится болтами к фланцу поворотного кронштейна стрелы подъемника. Модуль воспринимает на себя вертикальную нагрузку «Р», момент в плоскости стрелы «M1» и момент из плоскости стрелы «М2». Датчик нагрузки модуля встройки воспринимает и измеряет только вертикальную нагрузку «Р».
Модуль встройки содержит корпус, состоящий из двух частей. Данные части представляют собой две вертикальные половины 1 и 2 корпуса, скрепленные между собой. Соединение половин 1 и 2 осуществляется высокопрочной упругой пластиной 3, закрепляемой прижимными планками 4 с помощью винтов 5 к каждой половине корпуса.
Упругая пластина 3 может крепиться как на внутренних сторонах половин 1 и 2, так и снаружи их. В нашем варианте упругая пластина установлена на внутренних поверхностях указанных половин корпуса модуля.
Датчик нагрузки 6 прикреплен в полости корпуса к половинам 1 и 2 через шарнирные соединения 7 через стяжку 8, с помощью которой регулировочными гайками 9 осуществляется предварительный натяг датчика 6. Винты 10, размещенные по углам в верхней и нижней части половин корпуса, обеспечивают страховку от аварии в случае поломки упругих пластин 3. Страховочные винты 10 контрятся от самоотвинчивания гайками 11. Для защиты внутреннего объема модуля встройки датчика от грязи и пыли применяется резиновое уплотнение 12.
Дополнительно внутренний объем полости корпуса модуля защищен крышками 13, которые крепятся винтами 14.
Модуль встройки датчика ОПГ работает следующим образом. При нагружении половины 2 корпуса нагрузкой от веса люльки и груза, размещенного в ней, на нее действует вертикальная сила «Р» и моменты «M1» и «М2». Упругие пластины 3 воспринимают на себя моменты «M1» и «М2», действующие в двух плоскостях, а вертикальная нагрузка воспринимается датчиком 6.
Вертикальную нагрузку «Р» датчик модуля воспринимает на себя потому, что жесткость датчика 6 и элементов его крепления (детали 8, 4, 7) как минимум на порядок превышает жесткость упругих пластин 3 в вертикальном направлении.
Страховочные винты 10 вворачиваются в половину 2 и контрятся гайкой 11 таким образом, чтобы между половиной 1 и винтом 10 оставался зазор, обеспечивающий отсутствие контакта половины 1 корпуса с винтом 10 в пределах упругой деформации упругих пластин 3 и датчика 6 с элементами его крепления 4, 7, 8.
При поломке упругой пластины 3 или ослаблении ее крепления (планки 4 и винты 5) происходит контакт половины 1 корпуса с винтами 10, которые являются страховочными, половина 1 повисает на винтах 10 и тем самым обеспечивается безопасность людей, находящихся в люльке.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1998 |
|
RU2140060C1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2011 |
|
RU2490203C2 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2001 |
|
RU2199484C2 |
| ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2002 |
|
RU2222787C1 |
| ПОДЪЕМНИК ГИДРАВЛИЧЕСКИЙ | 2011 |
|
RU2458849C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2399578C1 |
| УСТРОЙСТВО ГОРИЗОНТИРОВАНИЯ ЛЮЛЬКИ АВТОПОДЪЕМНИКА | 2011 |
|
RU2488545C2 |
| ПОДЪЕМНИК | 1991 |
|
RU2006451C1 |
| Передвижной подъемник | 1976 |
|
SU602469A1 |
| Передвижной подъемник | 1980 |
|
SU925857A1 |

Изобретение относится к области грузоподъемной техники. Модуль встройки датчика нагрузки содержит корпус, выполненный из двух скрепленных между собой вертикальных половин корпуса, и внутри которого размещен датчик вертикальной нагрузки, прикрепленный к указанным половинам корпуса. Указанные половины корпуса скреплены друг с другом посредством упругих пластин таким образом, чтобы указанные упругие пластины воспринимали на себя все нагрузки, действующие на указанный модуль, кроме вертикальной. Датчик вертикальной нагрузки закреплен к указанным половинам корпуса так, чтобы воспринимать на себя только вертикальную нагрузку. Достигается увеличение ресурса работы модуля и повышение точности измерения нагрузки. 3 з.п. ф-лы, 3 ил.
1. Модуль встройки датчика нагрузки ограничителя предельного груза, содержащий корпус, выполненный из двух скрепленных между собой вертикальных половин корпуса, и внутри которого размещен датчик вертикальной нагрузки, прикрепленный к указанным половинам корпуса, отличающийся тем, что указанные половины корпуса скреплены друг с другом посредством упругих пластин таким образом, чтобы указанные упругие пластины воспринимали на себя все нагрузки, действующие на указанный модуль, кроме вертикальной, при этом датчик вертикальной нагрузки закреплен к указанным половинам корпуса так, чтобы воспринимать на себя только вертикальную нагрузку.
2. Модуль по п.1, отличающийся тем, что указанный датчик прикреплен к указанным половинам корпуса с возможностью осуществления предварительного натяга.
3. Модуль по п.1, отличающийся тем, что корпус оснащен страховочными винтами на случай разрушения упругих пластин или ослабления их крепления.
4. Модуль по п.3, отличающийся тем, что одним концом каждый страховочный винт ввернут в одну половину корпуса, а другой конец страховочного винта размещен в другой половине корпуса с зазором по отношению к указанной другой половине корпуса.
| Способ проверки изменения сопротивления реостата в функции от положения движка | 1948 |
|
SU81486A1 |
| DE 60212537 T2, 14.06.2007 | |||
| ИНДУКТИВНО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ИЗМЕРИТЕЛЯ ЭКСЦЕНТРИЧНОСТИ ЭЛЕКТРИЧЕСКОГО КАБЕЛЯ | 2005 |
|
RU2300737C1 |

