Область техники, к которой относится изобретение
Настоящее изобретение относится к контролю выравненности боковых стенок в сосудах, в частности - стеклянных, а более конкретно - к способу и устройству для идентификации выпуклостей или вогнутых участков на боковой стенке сосуда.
Уровень техники
Патент США 5291271 раскрывает устройство и способ электрооптического измерения толщины стенки сосуда. Источник света направляет световой пучок на внешнюю поверхность сосуда под таким углом, что часть светового пучка отражается от внешней поверхности, а часть преломляется в стенку сосуда, отражается от внутренней поверхности стенки и затем снова испускается из внешней поверхности стенки. Между оптическим датчиком и стенкой сосуда расположена система линз для фокусировки световой энергии, отраженной от внешней и внутренней поверхностей стенки, на датчик. Сосуд поворачивают вокруг оси, а электронные устройства обработки информации реагируют на световую энергию, падающую на датчик, для сканирования датчиком в процессе придания приращений повороту сосуда и определения толщины стенки сосуда между внутренней и внешней поверхностями стенки в зависимости от промежутка между точками падения отраженной световой энергии на датчик. Световая энергия, отраженная от внешней поверхности стенки сосуда, также дает информацию о контуре стенки в зависимости от поворота сосуда в том месте, в котором световая энергия падает на поверхность стенки и отражается от нее.
Раскрытие изобретения
Настоящее изобретение воплощает ряд аспектов, которые могут быть реализованы отдельно друг от друга или совместно друг с другом.
В соответствии с одним аспектом настоящего изобретения, устройство для контроля контура боковой стенки сосуда включает в себя, по меньшей мере, один источник света для направления световой энергии на боковую стенку сосуда и, по меньшей мере, один оптический датчик, расположенный с возможностью приема световой энергии от источника света после ее отражения от боковой стенки сосуда. Оптический датчик преобразует такую отраженную световую энергию в сигналы, характеризующие положение боковой стенки сосуда относительно датчика, по меньшей мере, в двух местах боковой стенки сосуда, отстоящих друг от друга в направлении оси сосуда. Процессор информации реагирует на такие сигналы, определяя контур боковой стенки сосуда в направлении оси сосуда в зависимости от положений боковой стенки в таких местах. Предпочтительно, чтобы, по меньшей мере, два места на боковой стенке сосуда были номинально выровнены друг с другом в направлении, параллельном оси сосуда. В предпочтительном варианте, одно из мест на боковой стенке сосуда находится рядом с плечиком сосуда или основанием сосуда, а другое из мест - на боковой стенке сосуда между плечиком сосуда и основанием сосуда.
В предпочтительных вариантах осуществления изобретения, по меньшей мере, один оптический датчик выдает сигналы, характеризующие положение боковой стенки сосуда относительно датчика, по меньшей мере, в трех местах на боковой стенке сосуда, отстоящих друг от друга в направлении оси сосуда. В предпочтительном варианте, процессор информации обнаруживает отклонения в контуре боковой стенки сосуда в зависимости от отклонения положения боковой стенки в одном из упомянутых трех мест от линии между положениями боковой стенки в остальных двух местах. Эти другие два места предпочтительно находятся соответственно рядом с основанием и плечиком сосуда, а одно место предпочтительно находится между основанием и плечиком сосуда. Предпочтительно, чтобы сосуд поворачивали вокруг оси, а первое, второе и третье места были номинально выровнены друг с другом в направлении, параллельном такой оси. Датчики могут представлять собой отдельные датчики, расположенные с возможностью приема световой энергии, отраженной от боковой стенки сосуда в трех местах боковой стенки, или зональный матричный датчик области, расположенный с возможностью приема световой энергии, отраженной от всех трех мест боковой стенки.
Краткое описание чертежей
Изобретение с его дополнительными задачами, признаками, преимуществами и аспектами можно будет лучше понять из нижеследующего описания, прилагаемой формулы изобретения и чертежей, при этом:
на фиг.1 представлен схематический вид устройства для контроля контура боковой стенки сосуда, соответствующего одному возможному варианту осуществления изобретения;
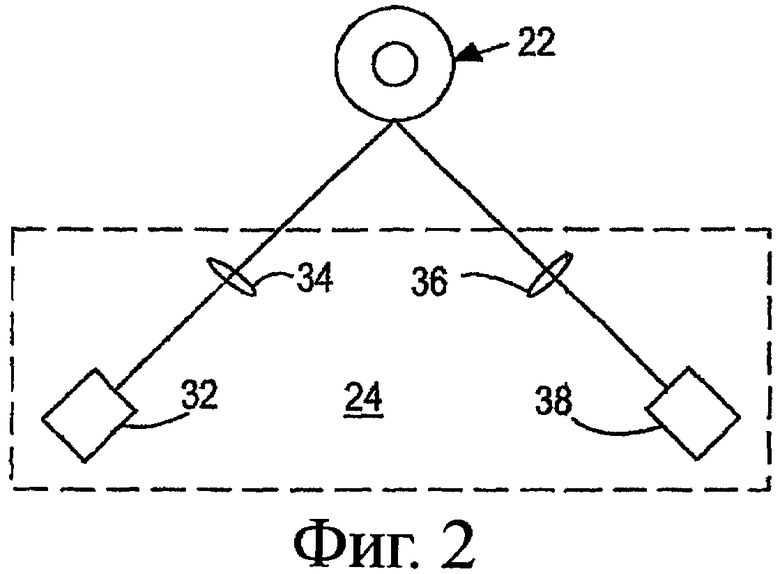
на фиг.2 представлен схематический вид сверху устройства, изображенного на фиг.1;
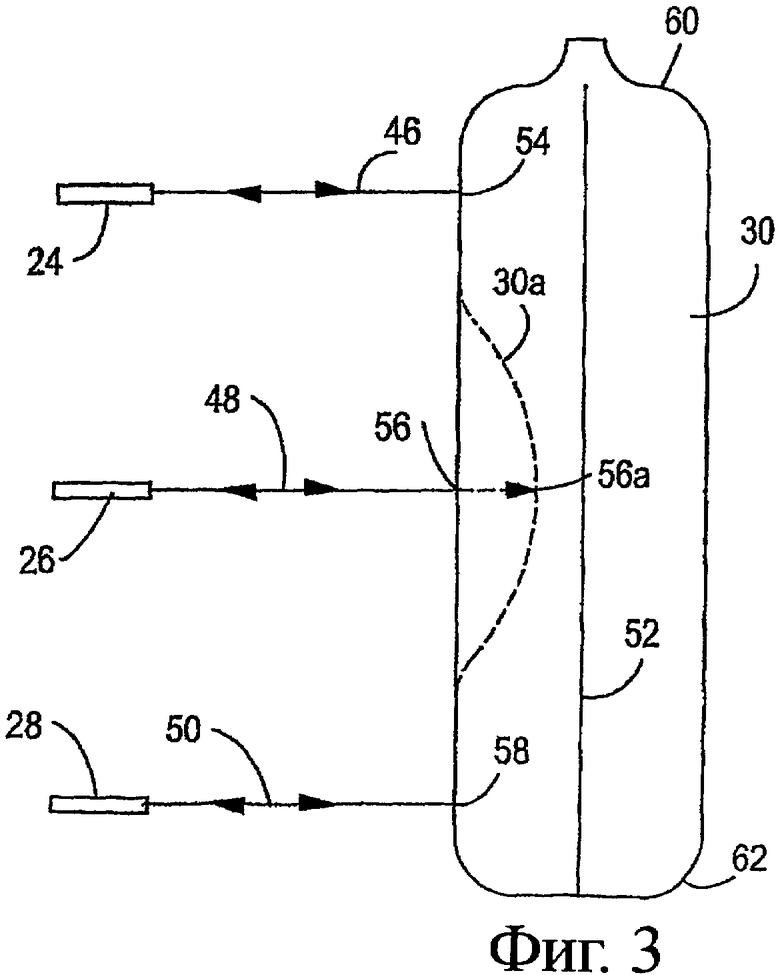
на фиг.3 представлена графическая иллюстрация работы устройства, изображенного на фиг.1 и фиг.2;
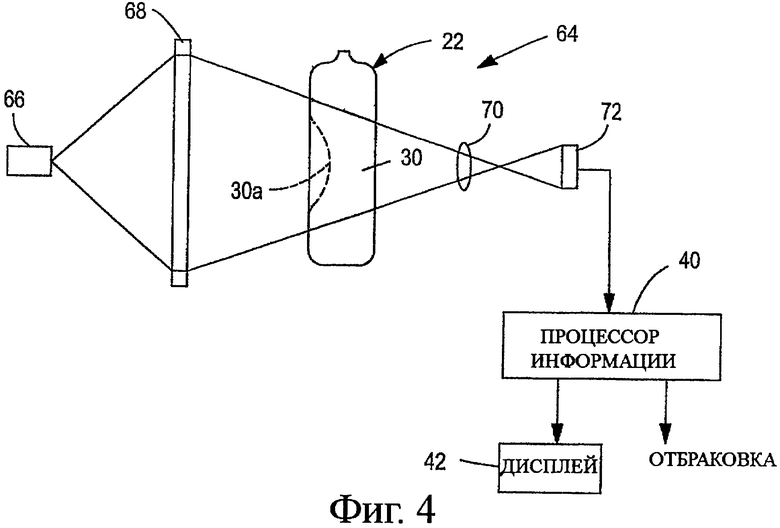
на фиг.4 представлен схематический вид устройства для контроля контура боковой стенки сосуда, соответствующего другому возможному варианту осуществления настоящего изобретения;
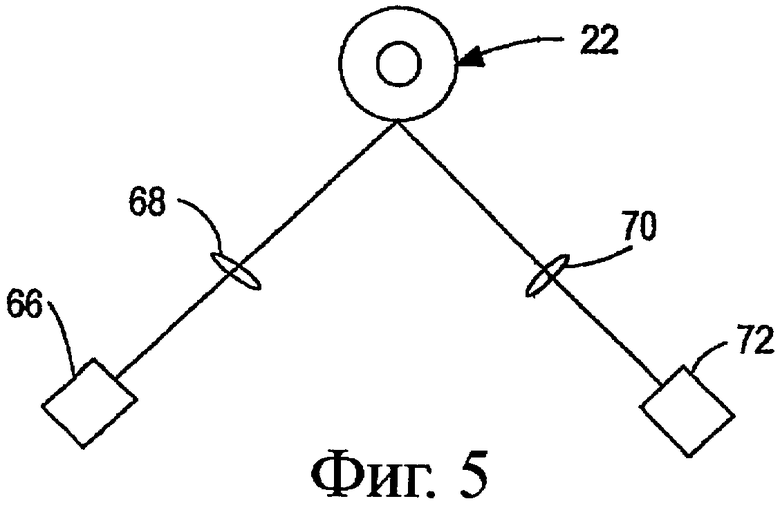
на фиг.5 представлен схематический вид сверху устройства, изображенного на фиг.4;
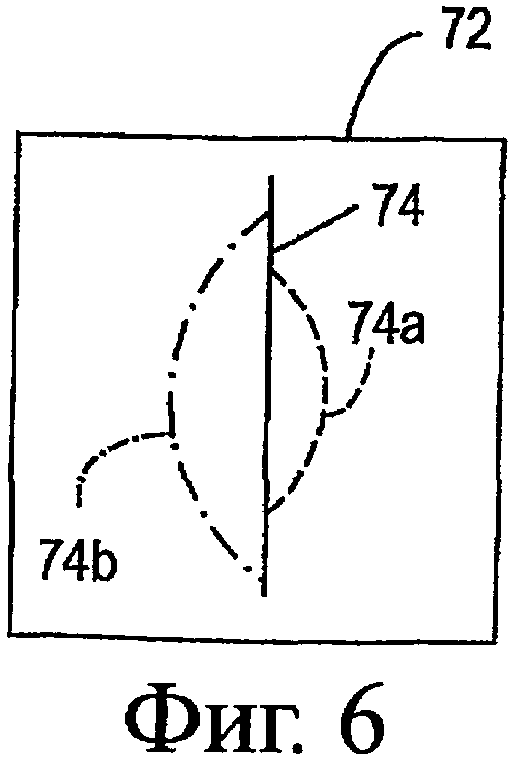
на фиг.6 представлена графическая иллюстрация контура боковой стенки сосуда, контролируемого с помощью устройства, изображенного на фиг.4 и 5; и
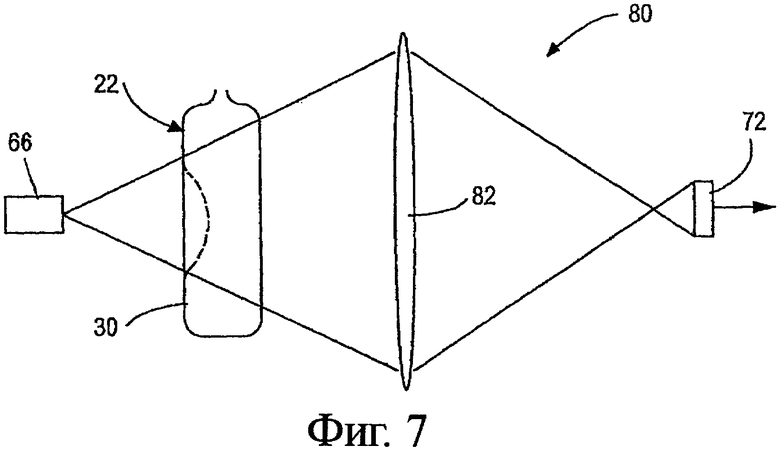
на фиг.7 представлен схематический вид устройства для контроля контура боковой стенки сосуда, соответствующего дополнительному варианту осуществления изобретения.
Осуществление изобретения
На фиг.1 и 2 изображено устройство 20 для контроля контура боковой стенки сосуда 22, соответствующее одному возможному варианту осуществления настоящего изобретения. Устройство 20 включает, по меньшей мере, один электрооптический сборочный узел или пробник 24, а предпочтительно - три электрооптических пробника 24, 26, 28, расположенных с возможностью направления и приема световой энергии, отраженной от боковой стенки 30 сосуда 22. Пробник 24 включает в себя источник 32 света для направления световой энергии на внешнюю поверхность боковой стенки 30 сосуда, предпочтительно через линзу 34, и оптический датчик 38, расположенный с возможностью приема световой энергии, отраженной от внешней поверхности боковой стенки, предпочтительно через линзу 36. Пробники 26, 28 предпочтительно идентичны пробнику 24. Источник 32 света и датчик 38 предпочтительно являются частью сборочного узла пробника, но источник 32 света и датчик 38 могут представлять собой и отдельные компоненты. Датчики 38 пробников 24-28 подключены к процессору 40 информации, который определяет контур боковой стенки, по входным сигналам датчиков и выдает выходной сигнал на подходящий дисплей 42. Процессор 40 информации может также выдавать выходной сигнал на подходящий браковочный механизм для браковки сосудов с нежелательными контурами боковых стенок.
Механизм 44 поворота сосуда предпочтительно поворачивает сосуд 22 вокруг оси вращения (позиция 52 на фиг.3), когда боковую стенку сосуда контролируют пробниками 24-28. Механизм 44 поворота сосуда может представлять собой любое подходящее устройство, такое как ведущий ролик, соединенный с подходящим приводным электродвигателем для удержания сосуда 22 у нажимных валиков во время поворота сосуда вокруг оси вращения. Такая ось вращения предпочтительно совпадает с осью сосуда. Только в качестве примера отметим, что подходящие системы для перевода сосудов 22 в положение контроля, поворота сосудов по очереди во время операции контроля и отвода сосудов после контроля проиллюстрированы в патентах США №№4378493 и 6581751.
Обращаясь к фиг.3, отмечаем, что пробник 24 направляет световую энергию на боковую стенку 30 сосуда и принимает отраженную световую энергию с поверхности, предпочтительно внешней поверхности, боковой стенки сосуда, в оптической плоскости 46. Аналогичным образом, пробники 26 и 28 направляют световую энергию на боковую стенку сосуда и принимают световую энергию, отраженную от поверхности, предпочтительно внешней поверхности боковой стенки, в соответствующих оптических плоскостях 48, 50. Плоскости 46, 48, 50 предпочтительно параллельны между собой и перпендикулярны оси 52 вращения сосуда, но это требование не является обязательным признаком. Световая энергия в плоскости 46 падает на внешнюю поверхность боковой стенки сосуда и отражается от этой поверхности в месте 54. Точно так же световая энергия в плоскости 48 падает на боковую стенку сосуда и отражается от нее в месте 56, а световая энергия в плоскости 50 падает на боковую стенку сосуда и отражается от нее в месте 58. Место 54 предпочтительно находится рядом с плечиком 60 сосуда, которое является точно круглым благодаря способу формования сосуда. Точно так же место 58 предпочтительно находится рядом с основанием 62 сосуда, которое является точно круглым благодаря способу формования сосуда. Место 56 может находиться в любом желаемом положении между местами 54, 58, к примеру, находиться посередине между местами 54, 58, как показано на фиг.3. Места 54, 56, 58 предпочтительно отстоят друг от друга в направлении оси 52, а предпочтительнее номинально выровнены друг с другом вдоль линии, параллельной оси 52. Под словом «номинально» подразумевается, что если боковая стенка 30 сосуда является цилиндрической и сосной с осью 52, то места 54, 56 и 58 будут располагаться вдоль поверхности цилиндра и будут выровнены друг с другом вдоль линии, параллельной оси 52. С другой стороны, если боковая стенка 30 наклонена к оси 52 или если боковая стенка 30 вогнута, как в месте 30а, таким образом, что место 56 становится местом 56а, то места 54, 56а, 58 больше не будут выровнены друг с другом в направлении, параллельном оси 52.
Оптические датчики 38 (фиг.2) выдают выходные сигналы в процессор 40 информации в зависимости от положения боковой стенки сосуда относительно оптических датчиков в каждом из мест 54, 56, 58. Процессор 40 информации предпочтительно определяет контур боковой стенки 30 сосуда в направлении оси 52 в зависимости от отклонения боковой стенки в месте 56 от линии между положениями боковой стенки в местах 54 и 58. Другими словами, процессор 40 информации (фиг.1) использует положения боковой стенки в местах 54, 58 для установления опорного значения, с которым сравнивает положение боковой стенки в месте 56. На фиг.3 пунктиром изображена воображаемая вогнутая боковая стенка 30а, для которой положение в месте 56а будет значительно отклоняться от опорной линии между положениями боковой стенки в позициях 54 и 58. Вогнутая боковая стенка 30а может привести к выбраковыванию сосуда. В качестве модификации варианта осуществления, изображенного на фиг.1-3, можно использовать только один из пробников 24, 28 для установления опорного значения, с которым сравнивается выходной сигнал положения боковой стенки из пробника 26. В качестве другой модификации, можно предусмотреть дополнительные пробники между пробниками 24, 28.
В варианте осуществления, изображенном на фиг.1-3, каждый из трех (или более) пробников 24, 26, 28 может быть выполнен в виде оптических толщиномеров того типа, которые раскрыты в вышеупомянутом патенте США №5291271, в соответствии с которым для определения контура боковой стенки сосуда отслеживают отражения от внешней поверхности сосуда, как описано выше. Для построения профиля контура боковой стенки вокруг всего сосуда предпочтительно осуществляют сканирование датчиками 38 в процессе придания приращений повороту сосуда. Такие приращения поворота сосуда могут представлять собой равные угловые приращения поворота сосуда или, например, равные временные приращения при повороте сосуда с постоянной угловой скоростью. Можно комбинировать эти методы, чтобы увеличить скорость контроля во время ускорения и замедления поворота сосуда.
На фиг.4-6 изображено устройство 64 для контроля контура боковой стенки сосуда в соответствии с другим возможным вариантом осуществления изобретения. Источник 66 света и линза 68 направляют прямолинейный световой пучок на внешнюю поверхность боковой стенки 30 сосуда. Этот прямолинейный световой пучок имеет большой размер, параллельный оси вращения сосуда 22, и малый размер, радиальный к такой оси на линии падения на боковую стенку сосуда. Линза 70 направляет световую энергию, отраженную от боковой стенки сосуда, на оптический датчик 72. В этом варианте осуществления, оптический датчик 72 предпочтительно представляет собой зональный матричный датчик области (фиг.6), который получает полностью полное отраженное изображение источника излучения. Это изображение может представлять собой, к примеру, изображение 74 в форме линии, если стенка сосуда не имеет выпуклых или вогнутых областей. С другой стороны, вогнутая область 30а (фиг.4) может дать контурное изображение 74а (фиг.6), а выпуклая боковая стенка может дать контурное изображение 74б. Как и в варианте осуществления, изображенном на фиг.1-2, контур боковой стенки определяют в зависимости от сравнения между одним или более положениями боковой стенки в местах вдоль среднего участка изображения и положениями боковой стенки в местах на верхнем и нижнем участках изображения.
На фиг.7 изображено устройство 80 в качестве модификации устройства 64, изображенного на фиг.4-6. Источник света 66 снова формирует прямолинейный световой пучок, который отражается от внешней поверхности боковой стенки 30 сосуда, а между сосудом 22 и датчиком 72 расположена фокусирующая линза 82 для направления отраженной световой энергии на поверхность датчика. Изображение на датчике опять представляет собой линию, параллельную оси сосуда, в то время как выпуклость или вогнутость исказят это линейное изображение, как показано на фиг.6.
Таким образом, раскрыты устройство и способ контроля контура боковой стенки сосуда. Изобретение представлено в связи с несколькими возможными вариантами осуществления, и описаны различные дополнительные модификации и варианты. Обычные специалисты в данной области техники сами легко смогут предложить другие модификации и варианты в свете предшествующего рассмотрения. Изобретение следует считать охватывающим все такие модификации и варианты как находящиеся в рамках существа и интерпретируемого в широком смысле объема притязаний прилагаемой формулы изобретения.
Устройство для контроля контура боковой стенки (30) сосуда включает в себя, по меньшей мере, один источник (32, 66) света для направления световой энергии на боковую стенку сосуда и, по меньшей мере, один оптический датчик (38, 72), расположенный с возможностью приема световой энергии от источника света после отражения от боковой стенки сосуда. Оптический датчик реагирует на такую отраженную световую энергию, выдавая сигналы, характеризующие положение боковой стенки относительно датчика, по меньшей мере, в трех местах (54, 56, 58) на стенке сосуда, отстоящих друг от друга в направлении оси сосуда. Процессор (40) информации реагирует на такие сигналы, определяя контур боковой стенки в зависимости от отклонения положения боковой стенки в одном из упомянутых трех мест от линии между положениями боковой стенки в остальных двух из упомянутых трех мест. Остальные два - (54, 58) - из упомянутых трех мест на боковой стенке сосуда предпочтительно находятся рядом с плечиком сосуда и основанием сосуда, при этом одно положение (56) находится между плечиком сосуда и основанием сосуда. В предпочтительном варианте эти, по меньшей мере, три места (54, 56, 58) на боковой стенке сосуда номинально выровнены друг с другом в направлении, параллельном оси сосуда. 2 н. и 6 з.п. ф-лы, 7 ил.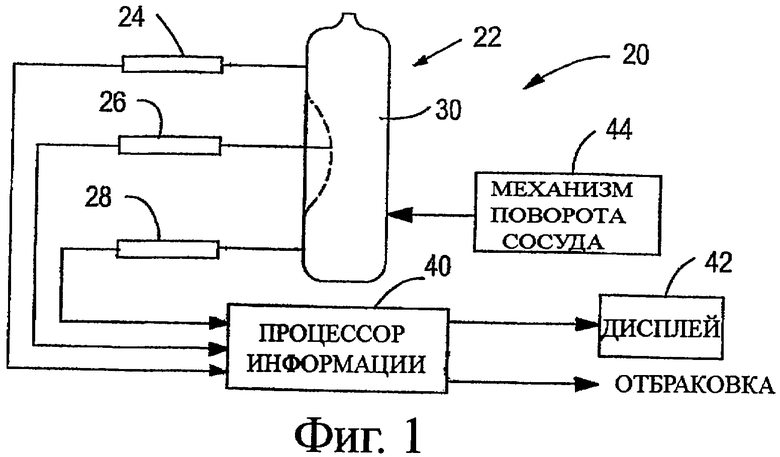
1. Устройство для контроля контура боковой стенки (30) сосуда, которое включает в себя
по меньшей мере, один источник (32 или 66) света для направления световой энергии на боковую стенку сосуда, в то время как сосуд вращается вокруг оси;
по меньшей мере, один оптический датчик (38 или 72), расположенный на упомянутом устройстве контроля, для приема световой энергии от упомянутого, по меньшей мере, одного источника света после отражения от внешней поверхности боковой стенки сосуда и реагирующий на такую отраженную световую энергию, выдавая сигнал, характеризующий положение боковой стенки сосуда относительно упомянутого датчика, и процессор (40) информации, подключенный к упомянутому датчику и реагирующий на упомянутый сигнал, определяя контур боковой стенки в направлении упомянутой оси при повороте сосуда вокруг упомянутой оси, отличающийся тем, что
упомянутый, по меньшей мере, один оптический датчик реагирует на упомянутую отраженную световую энергию, выдавая сигналы, характеризующие положение боковой стенки сосуда относительно упомянутого датчика в первом положении (54), находящемся рядом с плечиком сосуда, во втором положении (58), находящемся рядом с основанием сосуда, и в третьем положении (56), находящемся между указанными первым и вторым положениями, причем указанный процессор (40) выполнен с возможностью определения контура боковой стенки сосуда как функции отклонения положения боковой стенки в указанном третьем положении от линии между положениями боковой стенки в указанных первом и втором положениях.
2. Устройство по п.1, в котором упомянутый, по меньшей мере, один источник света и упомянутый, по меньшей мере, один датчик включают в себя, по меньшей мере, три источника света (32) и связанные с ними датчики (38), соответственно расположенные с возможностью направления световой энергии на боковую стенку сосуда и приема световой энергии от боковой стенки сосуда из указанных трех положений соответственно.
3. Устройство по п.2, в котором каждый упомянутый источник света является таким, что в каждом упомянутом положении на боковой стенке сосуда прием и отражение световой энергии происходят в плоскости (46, 48, 50), перпендикулярной оси сосуда.
4. Устройство по п.1, в котором упомянутый источник (66) света направляет к оси сосуда прямолинейный световой пучок, имеющий большой размер, параллельный упомянутой оси, и малый размер, радиальный к упомянутой оси, и в котором упомянутый датчик (72) включает в себя зональный матричный датчик для приема порций упомянутого прямолинейного светового пучка, отраженного от боковой стенки сосуда.
5. Устройство по п.1, в котором упомянутые первое, второе и третье положение номинально выровнены друг с другом в направлении, параллельном упомянутой оси.
6. Устройство по любому из пп.1-5, включающее в себя средства (44) для поворота сосуда вокруг оси (52), при этом упомянутый процессор информации выполнен с возможностью определения контура боковой стенки сосуда в процессе придания приращений повороту сосуда вокруг упомянутой оси.
7. Способ контроля контура боковой стенки (30) сосуда, имеющей плечико (60) и основание (62), включающий в себя этапы, на которых
(а) поворачивают сосуд (22) вокруг оси (52);
(б) направляют световую энергию на боковую стенку сосуда;
(в) направляют световую энергию, отраженную от боковой стенки сосуда, на один оптический датчик для формирования сигналов, характеризующих положение боковой стенки сосуда в первом и втором местах относительно, по меньшей мере, одного датчика, и
(г) определяют контур боковой стенки сосуда в направлении упомянутой оси в зависимости от упомянутых сигналов,
отличающийся тем, что
упомянутый этап (б) включает в себя направление световой энергии на боковую стенку сосуда, по меньшей мере, в первом положении (54), находящемся рядом с плечиком сосуда, во втором положении (58), находящемся рядом с основанием сосуда, и в третьем положении (56), находящемся между указанными первым и вторым положениями, упомянутый этап (в) включает направление световой энергии, отраженной от боковой стенки сосуда, по меньшей мере, в упомянутых первой, второй и третьей позициях на, по меньшей мере, один оптический датчик (38 или 72) для формирования сигналов, характеризующих положение боковой стенки сосуда в упомянутых первом, втором и третьем положениях относительно упомянутого, по меньшей мере, одного датчика, и упомянутый этап (г) включает определение контура сосуда как функции отклонения положения боковой стенки в указанном третьем положении от линии между положениями боковой стенки в указанных первом и втором положениях.
8. Способ по п.7, в котором упомянутые первое, второе и третье положения номинально выравниваются друг с другом в направлении, параллельном упомянутой оси.
| US5291271 А, 01.03.1994 | |||
| DE 29907762 U1, 21.10.1999 | |||
| Способ управления манипулятором и устройство для его осуществления | 1986 |
|
SU1318391A1 |
| СПОСОБ ВЫБОРА МЕТОДА ЛЕЧЕНИЯ БОЛЬНЫХ ДИСЦИРКУЛЯТОРНОЙ АТЕРОСКЛЕРОТИЧЕСКОЙ ЭНЦЕФАЛОПАТИЕЙ | 2000 |
|
RU2195178C2 |

