t1
изобретение относится к робототехнике и может быть использовано в манипуляторах, управляемых с помощью программных или вычислительных устройств или в копирующих режимах..
Цель изобретения - повьшение нагрузочной способности манипулятора.
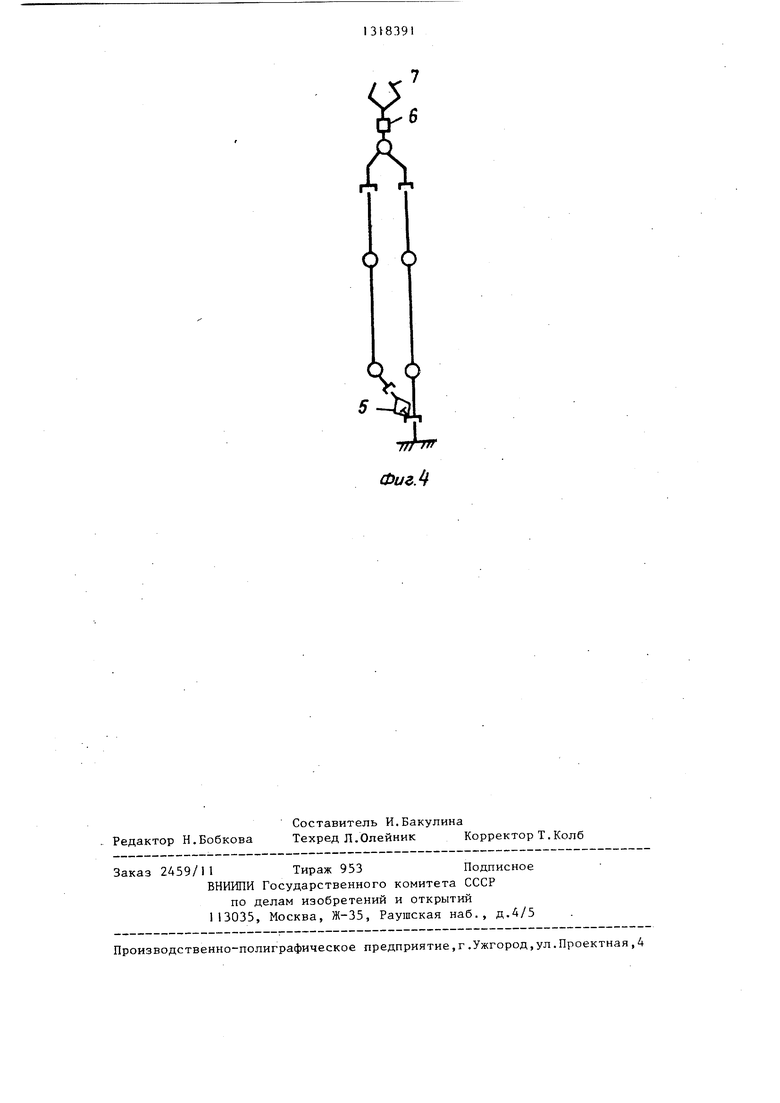
На фиг.I изображена схема манипулятора; на фиг.2 - то же, с дополнительным схватом; на фиг.З - манипулятор в рабочем положении; на фиг.4 - то же, вариант.
Устройство для реализации способа содержит механическую руку, вьтолнен- ную из звеньев 1, соединенных шарнирами 2, и систему управления приводами манипулятора (не показана), например программное или вычислительное устройство, необходимое для формирования сигналов управления на приводы, размещенные в шарнирах 2, и контроля величины моментов сопротивлений в этих шарнирах.
Механическая рука манипулятора закреплена неподвижно на основании 3 На свободном конце манипулятора .размещен основной схват 4, относительно шарнира 5 механическая рука манипулятора имеет одинаковые по длине звенья И. равное количество одинаковых по кинематике шарниров.
912
На шарнире 5 или возле него размещен соединительный элемент 6 для установки дополнительного схвата 7 с индивидуальным приводом. Кроме того, в соединительном элементе 6 предусмотрен разъем для включения привода дополнительного схвата в систему управления манипулятора.
Манипулятор работает следующим образом.
В соединительный элемент 6 устанавливается дополнительный схват 7 с индивидуальным приводом, привод схвата включается в систему управления манипулятора. Основной схват 4 фиксируется рядом с механической ру- кой манипулятора (на основании 3 или на манипуляторе рядом с первым относительно основания шарниром). С помощью дополнительного схвата 7 выполняются операции с грузом. Управление манипулятором может быть организовано от программных или вычислительных средств или же в копирующем режиме. При этом ввиду кинематической симметрии механической руки манипулятора управление им не няется. Принципы управления им остаются прежними, необходимо лишь учитывать, что число степеней подвижности сокращается в два раза.
У
О
V
с/
/
J/
.1
Фиг. 2
) О
О о
х
54
77/
ФигМ
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| Механическая рука с программным управлением | 1980 |
|
SU994249A1 |
| Автоматический манипулятор с программным управлением | 1985 |
|
SU1390014A1 |
| Копирующий манипулятор | 1989 |
|
SU1646842A1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Манипулятор | 1989 |
|
SU1743850A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Механическая рука | 1978 |
|
SU708624A1 |
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
1. Способ управления манипулятором, заключающийся в том, что с помощью системы управления формируют закон движения основного схвата и отрабатывают его всеми приводами манипулятора, имеющимися в его кинематической цепи, при этом контролируют величину моментов сопротивлений в шарнирах манипулятора, отличающий с я тем, что, с целью повышения нагрузочной способности манипулятора, в точке кинематической симметрии манипулятора размещают дополнительный охват с его индивидуальньм приводом и соединяют этот привод с системой управления, фиксируют пространственное положение основного схвата, а затем формируют и отрабатывают необходимый закон движения дополнительного схвата. 2. Устройство для осуществления способа управления манипулятором, содержащее механическую руку, вьтол- ненную в виде шарнирно соединенных звеньев, в шарнирах которых размещены приводы, и основного схвата с приводом, а также систему управления, отличающееся тем, что механическая рука снабжена дополнительным схватом с индивидуальным приводом и соединительным элементом, размещенным на шарнире в точке кинематической симметрии механической руки. (Л оо 00 СО со
| Способ управления манипулятором | 1977 |
|
SU639698A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
