Группа изобретений относится к области вертолетостроения, а конкретно, к видео фиксирующему устройству наблюдения, и может быть использовано для измерения маховых движений, соконусности и сближения лопастей несущих винтов соосных вертолетов, либо для определения изгибно-крутильных колебаний и влияния погодных условий на лопасти несущих винтов всех типов вертолетов, таких как обледенение, сильная влажность и т.п.Изобретение может быть использовано для предотвращения аварийных ситуаций связанных с возможным схлестыванием лопастей, возникающих при определенных режимах полета.
Известны способы измерения маховых движений и сближения лопастей несущих винтов соосных вертолетов. Более 50 лет измерения маховых движений и сближения лопастей несущих винтов соосных вертолетов выполняется при помощи приборов фотографирования соконусности (далее - ПФС). Для осуществления упомянутого способа необходимо тяжелое, объемное оборудование, габариты которого составляют примерно 2 м3, а вес около 340 кг.
В основу работы аппаратуры ПФС положен способ фотографирования концов лопастей в момент их прохождения перед щелью диафрагмы ПФС.Фотографирование производится на движущуюся непрерывно светочувствительную фотоленту, для зарядки одной кассеты ПФС, требуется 20 метров фотоленты. Продолжительность записи за один полет 1,6 минуты, это примерно 23-24 режима по 4 секунды записи. После выполнения наземно-летных испытаний, фотоленты обрабатываются в фотолаборатории по принципу проявки черно-белых фотографий. Время получения результатов составляет 2 дня. Метод надежный, но требует замены на более новые методы измерения.
Недостатки метода измерения сближения между концами лопастей несущих винтов с помощью аппаратов ПФС: метод устарел; много времени занимает на подготовку вертолета к испытаниям; нет запасных частей для аппаратов ПФС; требуется фотолаборатория для обработки фотолент; очень объемное оборудование; максимальная время записи полета 1,6 минут; требует больших финансовых затрат.
Известен способ измерения несоконусности лопастей несущего винта вертолета и устройство для его осуществления (патент RU 2415053, публ. 27.03.2011, B64F 5/00). Способ измерения несоконусности заключается в том, что опорный кадр изображения формируют путем усреднения всех кадров изображения за период не менее одного оборота несущего винта и подают на формирователь межкадровой разности одновременно с видеосигналом текущего кадра. Определяют и фиксируют максимальное значение амплитуды разностного видеосигнала. Используют его для отслеживания превышения разностным видеосигналом следующей лопасти заданного значения от зафиксированной амплитуды, фиксируют координату первого превышения порога. Определяют кадр с минимальной координатой первого превышения порога и сохраняют эту координату. Производят усреднение этой координаты за период нескольких оборотов несущего винта. Запускают алгоритм поиска базовой лопасти.
Известен способ измерения расстояния между концами лопастей вращающихся несущих соосных винтов вертолета, наиболее близкий к заявляемому изобретению, (SU 295713, публ. 12.02.1971, B64D 47/00), при котором при помощи закрепленной на вертолете фотокамеры с узкой щелью на диафрагме, расположенной параллельно валу винтов, фотографируют концы лопастей на непрерывно движущуюся фоточувствительную пленку, а затем этой же фотокамерой фотографируют штангу с масштабной шкалой, установленную на расстоянии радиуса винта от его оси, и полученным шаблоном расшифровывают фотограммы.
Недостатками устройства являются наличие механических узлов со сложной кинематикой, ограниченность времени записи информации из-за использования фотопленки и невозможность получения информации во время полета, чувствительность фотопленки к солнечному свету.
Техническая проблема, решаемая заявляемой группой изобретений, заключается в создании простого устройства с возможностью применения группы видеокамер для осуществления видеофиксации лопастей несущих винтов в момент их вращения, с помощью которого реализуют способ измерения махового движения, соконусности и сближения лопастей несущих винтов летательных аппаратов.
Технический результат, получаемый при реализации группы изобретений, заключается в повышении точности, надежности и удобства измерений, упрощении монтажа и демонтажа на вертолет.
Для достижения технического результата предлагается способ измерения махового движения, соконусности и сближения лопастей несущих винтов летательных аппаратов, включающий видеосъемку в процессе заданных режимов полета вращающихся винтов и обработку результатов, в соответствии с заявляемым изобретением отличающийся тем, что на вал несущего винта летательного аппарата устанавливают устройство, на котором закреплены видеокамеры, таким образом, чтобы объект наблюдения находился в центре кадра, выполняют тарировку видеокамер, выполняют видеосъемку на заданных режимах полета и на земле, переносят видеозаписи с карт памяти на компьютер, проводят обработку видеофайлов, получают экранные значения координат, которые затем переводят в реальные значения, строят диаграмму зависимости экранных координат к реальным значениям шкалы делений средства измерения, на основании полученных данных вычисляют показатели положения объектов наблюдения.
Кроме того, тарировку видеокамер выполняют с использованием тарировочного щита или нивелирной линейки, при этом тарировочный щит или нивелирную рейку устанавливают вертикально относительно оси вала несущего винта, в любом из азимутов встречи лопастей, таким образом, чтобы законцовки лопастей нижнего и верхнего винтов касались упомянутых щита или рейка.
При этом в процессе осуществления видеосъемки с помощью пульта дистанционного управления включают все видеокамеры 3, и медленно, вручную, делают полный оборот несущего винта, при этом каждая видеокамера 3 записывает момент попадания в кадр тарировочного щита или нивелирной рейки, также видеокамеры 3 записывают положение лопастей и положение тарировочного щита или нивелирной линейки.
Кроме того, обработка видеофайлов тарировки видеокамер включает в себя следующие операции: полученные видеофайлы загружают в программу поочередно, выбирают экранную систему координат «Coordinate System», ось 0Y устанавливают таким образом, чтобы ей были перпендикулярны полосы на тарировочном щите; для отметки координат каждой из полос тарировочного щита в программе выбирают маркер «massA», осуществляют «скалывание» точек координат, после «скалывания» черно-белых полосок тарировочного щита снизу в вверх по шкале OY «Coordinate System» получают таблицу точек координат, которую затем переносят в таблицу Excel, каждому экранному значению координат сопоставляют значение «реальных» значений на тарировочном щите или нивелирной рейке, затем строят диаграмму зависимости экранных координат к реальным значениям тарировочного щита, строят линию тренда, «полиномиальная» 2 или 3 степени, с отображением математической формулы на диаграмме, готовят таблицу в программе Excel с применением полученной формулы для обработки видеоматериалов испытаний.
В дальнейшем на основании полученной информации готовят инструкции для пилотов и/или производят регулировку колонки несущего винта и/или проверяют лопасти на стендах и/или делают заключение о состоянии лопастей.
Для достижения технического результата предлагается устройство для измерения махового движения, соконусности и сближения лопастей несущих винтов летательных аппаратов для реализации упомянутого способа, содержащее видеокамеры и средство их крепления, в соответствии с заявляемым отличающееся тем, что устройство выполнено в виде хомута 1, состоящего из, по меньшей мере, двух частей, закрепленных между собой болтовым соединением, на хомуте 1 жестко закреплены корпуса 2, снабженные отверстиями и крышками и выполненные с возможностью размещения в них видеокамер 3, на хомуте 1 закреплены крепежные элементы для установки балансировочных грузов.
При этом хомут 1 закреплен на токосъемнике нижнего несущего винта вертолета, при этом части хомута 1 выполнены дугообразной формы, из металла, изнутри покрыты уплотнительным слоем.
Кроме того, количество корпусов 2 и видеокамер 3 равно количеству объектов наблюдения.
Также каждый корпус 2 приварен к хомуту 1, при этом установлен таким образом, что размещенная в нем видеокамера 3 направлена на объект наблюдения.
Применение предлагаемого способа и устройства для измерения махового движения, соконусности и сближения лопастей несущих винтов летательных аппаратов, в котором видеокамеры закреплены с помощью устройства, выполненного в виде хомута 1, дугообразные части которого соединены с помощью болтового соединения, направлено на упрощение монтажа и демонтажа на вертолет и снижение веса конструкции по сравнению с ранее используемым оборудованием ПФС. Болтовое соединение является простым в использовании, т.е. части хомута 1 легко монтируются и демонтируются на вал несущего винта. Видеокамеры могут быть легко установлены в корпуса, которые жестко закреплены на хомуте 1 и ориентированы на объекты наблюдения.
Применение предлагаемого способа и устройства позволяет повысить точность, надежность и удобство измерений, в связи с тем, что видео фиксацию лопастей несущих винтов осуществляют непрерывно в момент их вращения, при этом объекты наблюдения постоянно находятся в кадре, т.к. видеокамеры направлены непосредственно на объект наблюдения.
Кроме того, применение предлагаемого способа и устройства позволяет повысить точность, надежность и удобство измерений, за счет осуществления предварительной тарировки видеокамер, переносе результатов видеосъемки на персональный компьютер, обработке файлов с применением заранее подготовленных необходимых таблиц для обработки информации.
Изобретение поясняется чертежами и фотоматериалами:
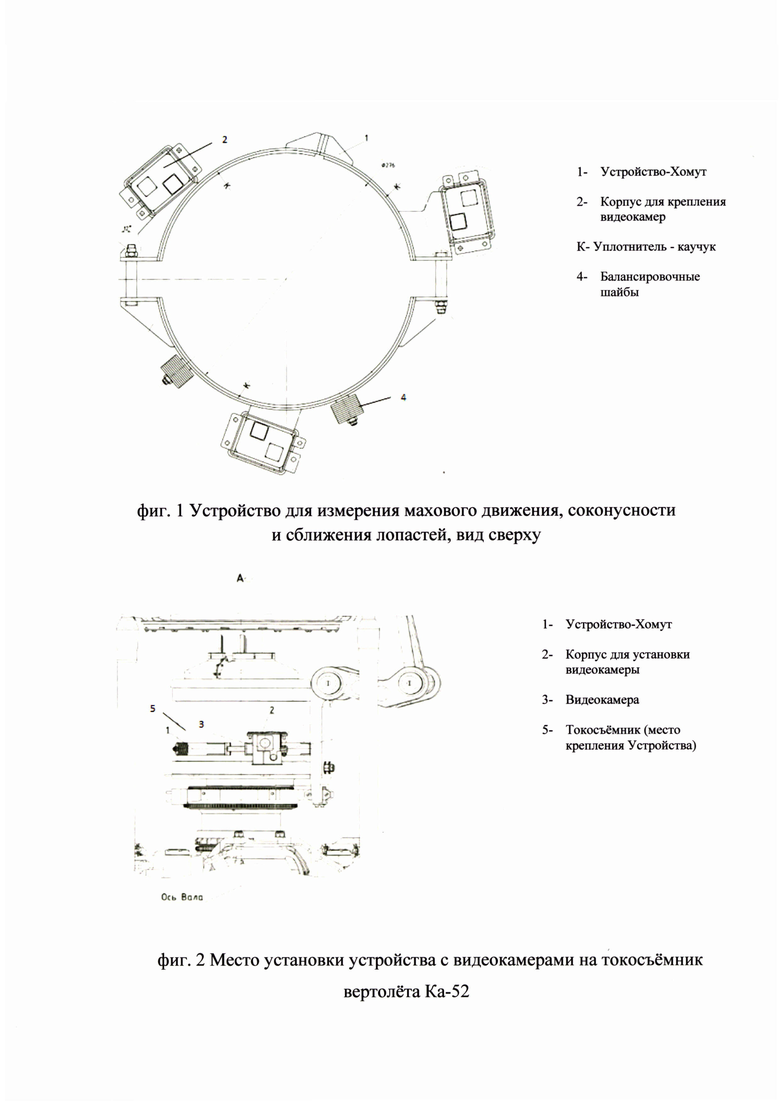
Фиг. 1 - Устройство для измерения махового движения, соконусности и сближения лопастей, вид сверху.
Фиг. 2 - Схема крепления устройства и видеокамер на токосъемник вертолета.
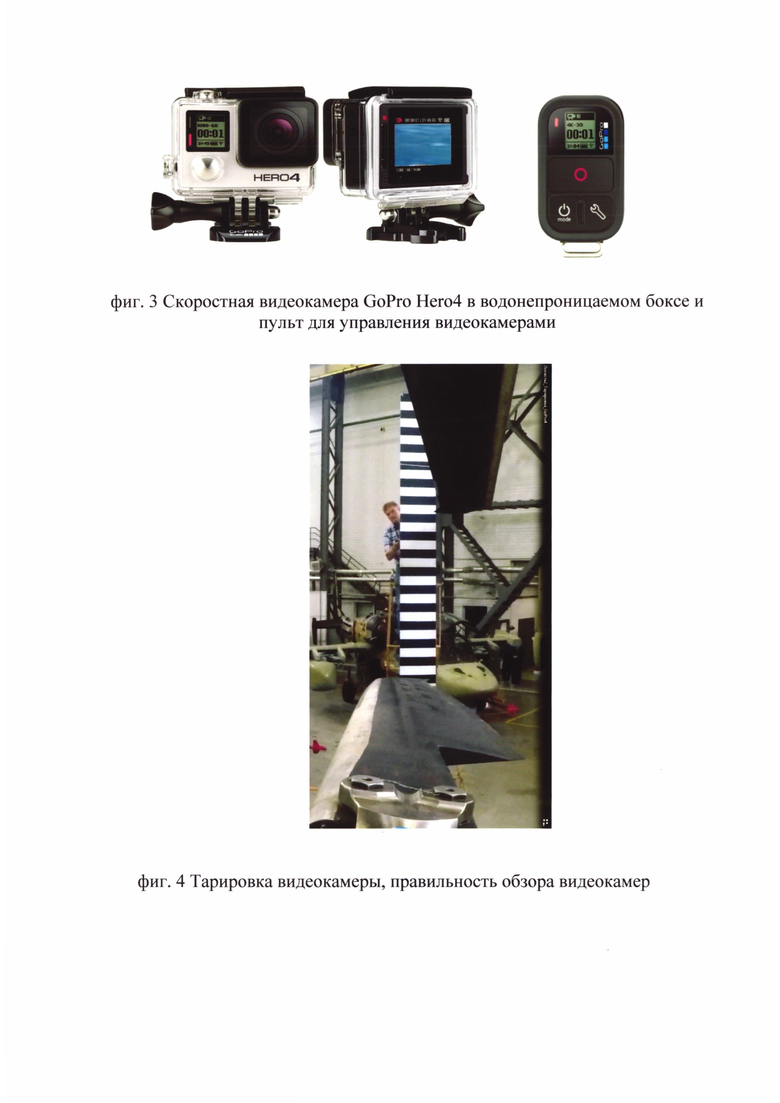
Фиг. 3 - Скоростная видеокамера GoPro Него4 в водонепроницаемом боксе и пульт для управления видеокамерами.
Фиг. 4 - Тарировка видеокамеры, необходимый обзор видеокамер.
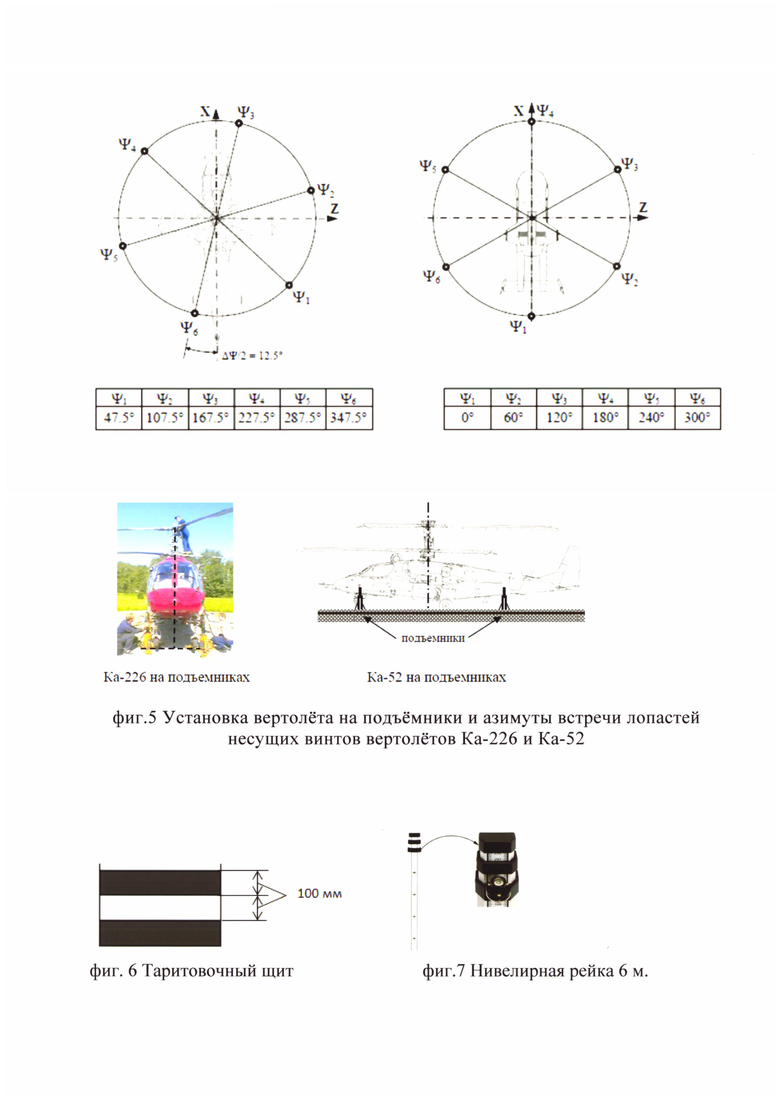
Фиг. 5 - Установка вертолета на подъемники и азимуты встречи лопастей соосных несущих винтов вертолетов.
Фиг. 6 - Тарировочный щит длина 6 м.
Фиг. 7 - Нивелирная рейка длина 6 м.
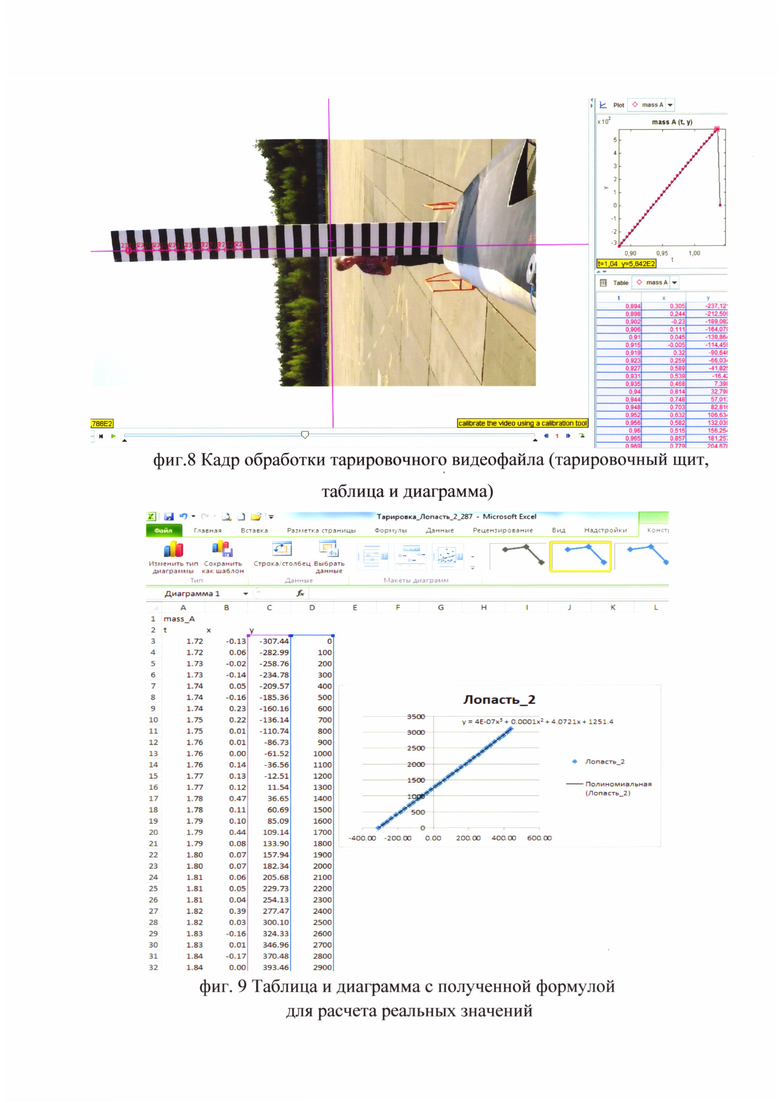
Фиг. 8 - Пример обработки тарировочного файла (тарировочный щит, таблица и диаграмма).
Фиг. 9 - Пример диаграммы с полученной формулой для расчета реальных значений (переводят пиксели в миллиметры).
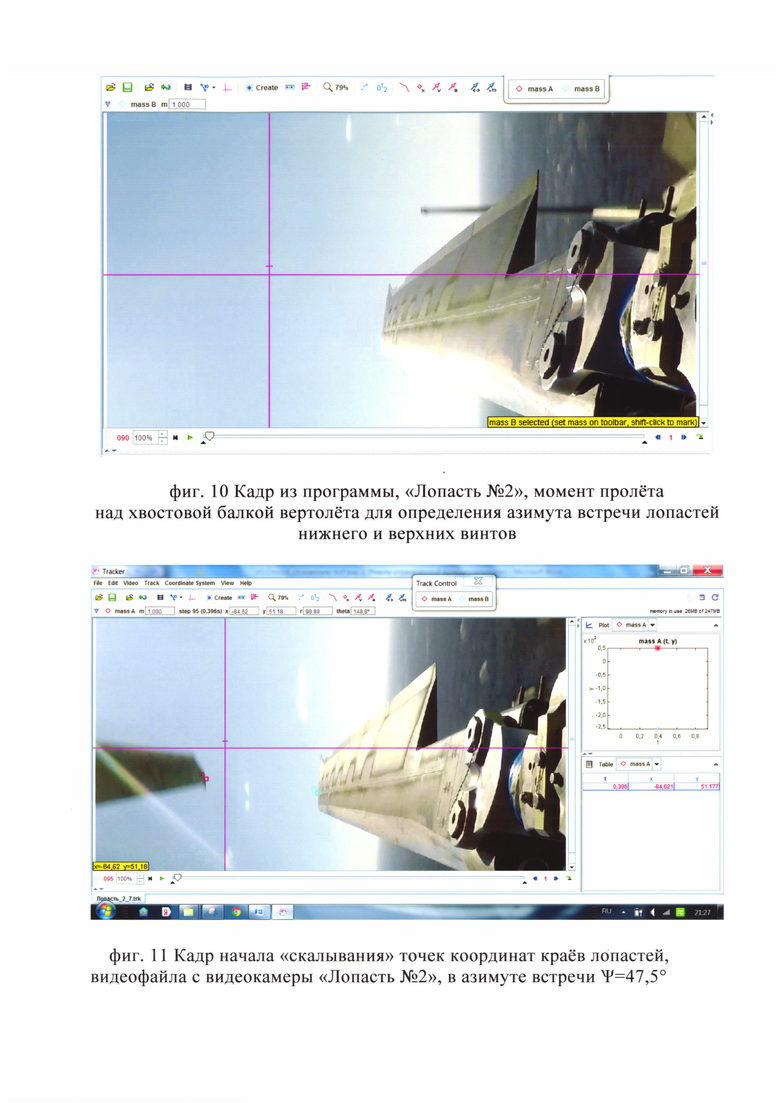
Фиг. 10 - Кадр из программы, видеофайл «Лопасть №2», момент пролета над хвостовой балкой вертолета для определения азимута встречи лопастей нижнего и верхних винтов.
Фиг. 11 - Кадр начала «скалывания» точек координат краев лопастей, видеофайла с видеокамеры «Лопасть №2», в азимуте встречи.
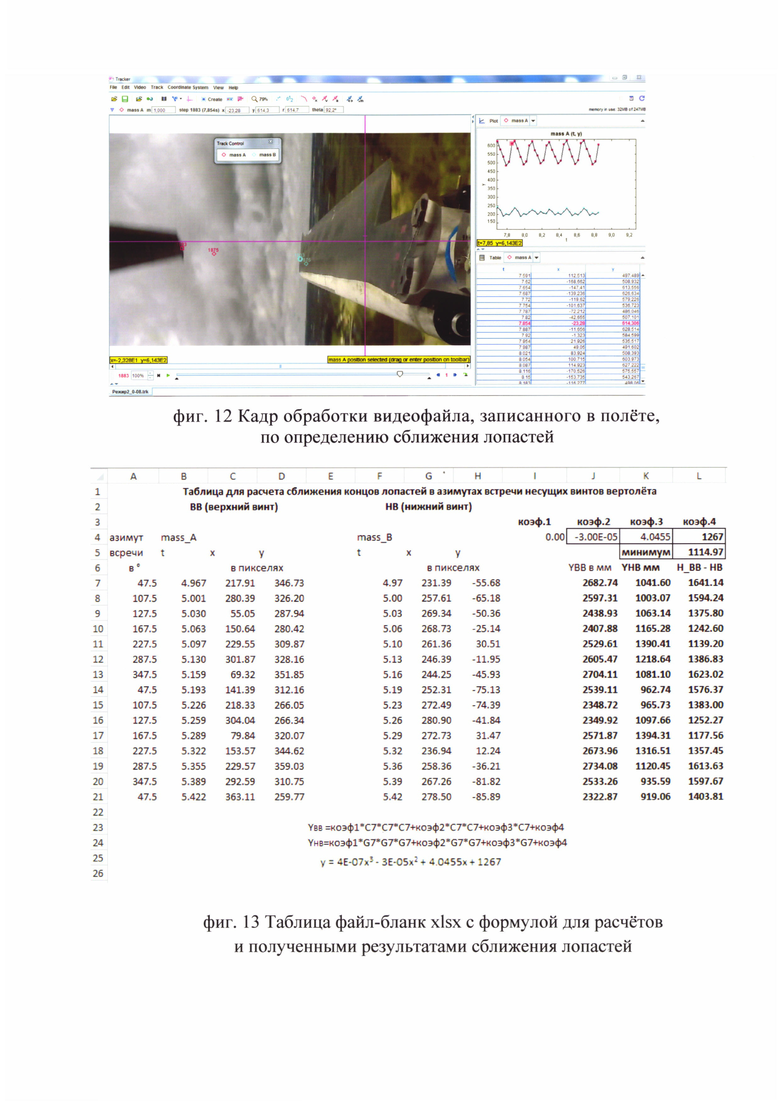
Фиг. 12 - Пример кадра обработки видеофайлов в программе Tracker записанных в полете.
Фиг. 13 - Пример таблицы файл-бланк xlsx с формулой для расчетов и полученными результатами сближения лопастей.
Устройство для визуального наблюдения за механизмами или лопастями несущей системы летательных аппаратов выполнено в виде металлического хомута 1 (фиг. 1), состоящего из трех частей дугообразной формы, снабженных проушинами и закрепленных по краям между собой болтовым соединением. При этом используют крепеж повышенной прочности для обеспечения безопасности полета. На хомут 1 изнутри приклеен уплотнитель, к примеру, каучук, для более плотного прилегания устройства -хомута к месту установки и устранения скольжения.
Снаружи к секциям хомута 1 жестко закреплены три корпуса 2, выполненные с возможностью установки в них видеокамер 3. Каждый корпус 2 выполнен из металла, имеет форму чехла для видеокамеры 3 и снабжен крышкой. В каждом корпусе 2 выполнены отверстия под объектив видеокамер 3. Для безопасности каждый корпус 2 приварен к хомуту 1, при этом установлен таким образом, что размещенная в нем видеокамера 3 направлена конкретно на объект наблюдения.
Хомут 1 может состоять из двух и более дугообразных частей в зависимости от конструкции и места установки.
На хомуте 1 приварены два болта для установки балансировочных шайб 4. Балансировка устройства выполняется после установки всех элементов конструкции и группы видеокамер для исключения вибраций в полете. Далее описан пример использования трех видеокамер в устройстве для измерения маховых движений, соконусности и сближения лопастей несущих винтов соосных вертолетов модификации Ка. При этом количество корпусов 2 и видеокамер 3 равно количеству объектов наблюдения, таких как лопастей либо других механизмов несущей системы летательных аппаратов, и зависит от цели исследования.
Устройство устанавливают на токосъемник 5 (фиг. 2) нижнего несущего винта вертолета. Размер хомута 1 зависит от диаметра и конструкции токосъемника 5. На фиг. 3, изображена скоростная видеокамера GoPro Него 4 в водонепроницаемом боксе, и пульт для управления видеокамерами. Хомут 1 устанавливают таким образом, чтобы каждая из трех видеокамер размещалась над лопастью нижнего винта, при этом лопасть нижнего винта должна находиться в центре кадра (фиг. 4).
Затем выполняют тарировку видеокамер в соответствии с методикой, описанной ниже.
Работы по тарировке видеокамер выполняются на ровной аэродромной площадке, вертолет устанавливают на четырех гидравлических подъемниках.
После чего гидравлическими подъемниками поднимают вертолет таким образом, чтобы вал несущего винта вертолета установился в горизонтальное положение относительно земли, при этом применяют инструмент для измерения, к примеру, угловой квадрант (фиг. 5).
Затем, вращая лопасть нижнего винта против часовой стрелки, сводят лопасти верхнего и нижних винтов друг над другом. Тарировочный щит или нивелирную рейку устанавливают вертикально относительно оси вала несущих винтов, в любом из азимутов встречи лопастей таким образом, чтобы законцовки лопастей нижнего и верхнего винтов касались упомянутого щита или рейки. С помощью пульта дистанционного управления включают все видеокамеры 3, и медленно, вручную, делают полный оборот несущего винта. Каждая видеокамера 3 записывает момент попадания в кадр тарировочного щита или нивелирной рейки, в процессе полного оборота несущих винтов, при этом видеокамеры 3 записывают положение лопастей и положение тарировочного щита или нивелирной рейки. Выключают видеокамеры 3.
При этом за один оборот винта в каждой из видеокамер 3 будет записан момент прохождения тарировочного щита в кадре. Тарировка выполнена. Видеокамеры либо карты памяти извлекают из корпусов 2 для скачивания видеофайлов, зарядки аккумуляторов и т.п.
Для тарировки видеокамер используют тарировочный щит, который имеет белые и черные полосы, каждая из которых равна 100 мм, или нивелирную рейку длиной 5-6 м (фиг. 6, 7). С помощью предлагаемой методики тарировка трех видеокамер занимает не более 5 минут.
Необходимо отметить, что для определения маховых движений и сближения концов лопастей несущих винтов достаточно выполнить тарировку видеокамер в одном из азимутов встречи лопастей несущих винтов.
При определении соконусности в каждом азимуте встречи лопастей для получения более точных изменений тарировку видеокамер необходимо выполнить во всех азимутах встречи лопастей несущих винтов.
Полученные видеозаписи тарировки с карт памяти видеокамер переносят на персональный компьютер для дальнейшей обработки в подготовленной для этого программе.
Обработка видеофайлов тарировки видеокамер включает в себя следующие операции: полученные видеофайлы загружают в программу поочередно; выбирают экранную систему координат «Coordinate System», ось 0Y устанавливают таким образом, чтобы ей были перпендикулярны полосы на тарировочном щите; для отметки координат каждой из полос тарировочного щита в программе выбирают маркер «massA» (упомянутый процесс называется «скалывание» точек координат); после «скалывания» черно-белых полосок тарировочного щита снизу в вверх (интервал деления полосок 100 мм) по шкале 0Y «Coordinate System» получают таблицу точек координат, которую затем переносят в таблицу Excel. Каждому экранному значению координат (в пикселях), сопоставляют значение «реальных» значений (в мм) на тарировочном щите или нивелирной рейке. Строят диаграмму зависимости экранных координат к реальным значениям тарировочного щита, строят линию тренда, «полиномиальная» 2 или 3 степени с отображением математической формулы на диаграмме (фиг. 9).
Готовят таблицу в программе Excel с применением полученной формулы для обработки видеоматериалов испытаний.
Для получения экспресс анализа расстояний между концами лопастей несущих винтов в азимутах встречи летных испытаний, достаточно обработать записи одной видеокамеры.
Тарировку видеокамер, подготовку таблиц и формулы для обработки видеофайлов испытаний достаточно выполнить один раз и на одном из вертолетов конкретного типа, чтобы использовать их в других испытаниях до тех пор, пока не будут внесены конструктивные изменения в несущей системе вертолета, т.к. положение камер и расстояние до законцовок лопастей сохраняется неизменным.
Предлагаемую методику используют следующим образом.
При выполнении наземных или летных испытаний оператор (штурман) из кабины пилота с помощью пульта с дистанционным управлением включает и выключает видеокамеры перед началом и окончанием режима, как указанно в Полетном задании.
После окончания наземной гонки или полета информацию с видеокамер переписывают на персональный компьютер и обрабатывают в специальной программе, с применением материалов, полученных при выполнении тарировки видеокамер. В настоящее время для обработки видеофайлов используется программа Tracker. В мире новых технологий программы или видеокамеры могут меняться, сам принцип предлагаемого нового устройства и метода расчетов останется прежними.
Видеозаписи, полученные с применением предлагаемой методики, показали, что лопасти вертолета в полете имеют разные маховые движения и крутящие моменты, что приводит к вибрациям вертолетов. С помощью предлагаемого метода можно решить эту проблему. На основании полученных результатов затем производят регулировку колонки несущего винта и триммеров лопастей несущих винтов с целью устранения вибраций, исключения опасных режимов, повышения уровня безопасности полетов.
Предлагаемые способ и устройство можно использовать на стендах для проверки лопастей всех видов вертолетов после их изготовления, чтобы избежать установки некачественных лопастей на вертолеты.
Таким образом достигается точность, надежность и удобства измерений за счет того, что видео фиксация лопастей несущих винтов осуществляется непрерывно в момент их вращения. При этом лопасти постоянно находятся в кадре, т.к. над каждой из них установлена видеокамера, в отличие от известных методов, применяемых для реализации задачи по измерению соконусности, маховых движений и расстояния между концами лопастей верхнего и нижнего винтов. Предлагаемый способ наблюдения прост для применения и обучения специалистов, не требует больших финансовых затрат, имеет многофункциональный эффект. Все применяемое оборудование легко устанавливается за счет простоты установки видеокамер в корпусах, закрепленных на хомуте, весит не более 3-х кг, что особенно актуально для сохранения летно-технических характеристик летательных аппаратов. Пример осуществления способа.
Устанавливают хомут 1, соединяя дугообразные части между собой и затягивая гайки болтового соединения. Настраивают видеокамеры 3 (дату, время, частоту кадра, разрешение), включают пульт для дистанционного управления видеокамерами. Закрепляют три видеокамеры 3 в контейнерах 2, установленных на хомуте 1.
При выполнении полета в режимах, таких как, скоростные режимы, маневрирование, набор высоты, авторотация, оператор-штурман включает видеокамеры с помощью дистанционного пульта и выключает перед началом и концом режима, что позволяет замерить расстояния между лопастями нижнего и верхнего винтов на протяжении всего режима полета.
После приземления вертолета видеокамеры 3 извлекают из корпусов 2 для обработки полученных материалов и зарядки аккумуляторов. С карт памяти видеокамер переписывают видеофайлы на персональный компьютер в папку, пример: «Ка-226№001_Полет №1_12.12.2021», в папке каждый файл относится к определенному режиму, и имеет соответствующее название, пример: «Ка226 №001_12.12.2021_Висение»; «Ка226№001_12.12.2021_ГП_V=100 км/ч» и т.д. Открывают программу для обработки видеофайлов, загружают видеофайл.
Открывают тарировочный файл, из которого переносят ось координат в рабочий файл (фиг. 8). В рабочем файле выбирают два маркера «massA» и «massB» для «скалывания» точек координат лопастей верхнего и нижнего винтов (фиг. 12).
У вертолетов соосной схемы несущих винтов, азимуты встречи лопастей отличаются друг от друга (пример таблицы азимуты встречи фиг. 5) Начало «скалывания» верхней и нижней лопасти выполняется в азимуте Ψ1=45° (для Ка-32), для этого покадрово, вручную, перематывают видеофайл, находят видеокадр, содержащий момент пролета лопасти над хвостовой балкой вертолета (фиг. 10). После этого кадра находят кадр, когда лопасти верхнего и нижнего винта будут находится в кадре одновременно, этот момент соответствует азимуту Ψ1=45° (фиг. 11). Следующий кадр, в котором лопасти верхнего и нижних винтов будут одновременно в кадре, соответствует азимуту Ψ2=105° и т.д.
Таблицу из программы копируют и переносят в Excel, файл-бланк таблицы xlsx изображен на рис. 13. Получают расстояния между лопастями верхнего и нижнего винтов. В такой последовательности обрабатывают все видеофайлы.
На основании полученной информации в дальнейшем готовят инструкции для пилотов, производят регулировку несущего винта, проверяют лопасти на стендах, делают заключение о состоянии лопастей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАТИЧЕСКОЙ РЕГУЛИРОВКИ СОКОНУСНОСТИ ЛОПАСТЕЙ НЕСУЩЕГО ВИНТА ВЕРТОЛЁТА | 2023 |
|
RU2809683C1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2010 |
|
RU2441807C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2016 |
|
RU2619679C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ В СИСТЕМЕ ПРОДОЛЬНОГО УПРАВЛЕНИЯ И УПРАВЛЕНИЯ ОБЩИМ ШАГОМ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2014 |
|
RU2556043C1 |
| Способ определения и устранения индивидуальных различий лопастей несущего винта винтокрылого летательного аппарата | 2022 |
|
RU2804546C1 |
| УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ СБЛИЖЕНИЯ ЛОПАСТЕЙ НЕСУЩИХ ВИНТОВ СООСНОГО ВЕРТОЛЕТА | 2021 |
|
RU2772464C1 |
| СПОСОБ КОНТРОЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ НЕСУЩЕГО И РУЛЕВОГО ВИНТОВ ВЕРТОЛЕТА | 2016 |
|
RU2628034C1 |
| Универсальное приспособление сравнения жесткости лопастей несущих или рулевых винтов вертолётов на изгиб в плоскости тяги | 2018 |
|
RU2704753C1 |
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2709081C1 |
| СПОСОБ ОЦЕНКИ ПОЛЯ ОСРЕДНЕННЫХ ИНДУКТИВНЫХ СКОРОСТЕЙ НЕСУЩЕГО ВИНТА НА МАЛЫХ СКОРОСТЯХ ПОЛЕТА ВЕРТОЛЕТА | 2007 |
|
RU2343441C1 |
Группа изобретений относится к способу и устройству для измерения махового движения, соконусности и сближения лопастей несущих винтов летательных аппаратов. Для осуществления способа устанавливают на вал несущего винта устройство с закрепленными на нем видеокамерами таким образом, чтобы объект находился в центре кадра, выполняют тарировку видеокамер, выполняют видеосъемку на заданных режимах полета и на земле, переносят видеозаписи с карт памяти на компьютер, проводят обработку видеофайлов, получают экранные значения координат, которые затем переводят в реальные значения, строят диаграмму зависимости экранных координат к реальным значениям шкалы делений, на основании полученных данных вычисляют показатели положения объектов наблюдения. Устройство содержит видеокамеры и средство их крепления, выполненное определенным образом. Обеспечивается повышение точности, надежности и удобства измерений, упрощение монтажа и демонтажа на вертолет. 2 н. и 7 з.п. ф-лы, 13 ил.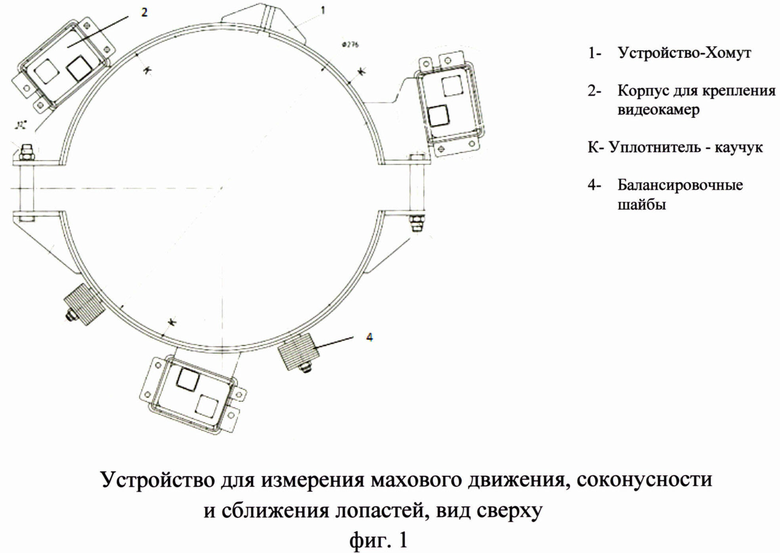
1. Способ для измерения махового движения, соконусности и сближения лопастей несущих винтов летательных аппаратов, включающий видеосъемку в процессе заданных режимов полета вращающихся винтов и обработку результатов, отличающийся тем, что на вал несущего винта летательного аппарата устанавливают устройство, на котором закреплены видеокамеры таким образом, чтобы объект наблюдения находился в центре кадра, выполняют тарировку видеокамер, выполняют видеосъемку на заданных режимах полета и на земле, переносят видеозаписи с карт памяти на компьютер, проводят обработку видеофайлов, получают экранные значения координат, которые затем переводят в реальные значения, строят диаграмму зависимости экранных координат к реальным значениям шкалы делений, на основании полученных данных вычисляют показатели положения объектов наблюдения.
2. Способ по п. 1, отличающийся тем, что тарировку видеокамер выполняют с использованием тарировочного щита или нивелирной линейки, при этом тарировочный щит или нивелирную рейку устанавливают вертикально относительно оси вала несущего винта, в любом из азимутов встречи лопастей, таким образом, чтобы законцовки лопастей нижнего и верхнего винтов касались упомянутых щита или рейки.
3. Способ по пп. 1 и 2, отличающийся тем, что в процессе осуществления видеосъемки с помощью пульта дистанционного управления включают все видеокамеры (3) и медленно, вручную, делают полный оборот несущего винта, при этом каждая видеокамера (3) записывает момент попадания в кадр тарировочного щита или нивелирной рейки, также видеокамеры (3) записывают положение лопастей и положение тарировочного щита или нивелирной линейки.
4. Способ по п. 1, отличающийся тем, что обработка видеофайлов тарировки видеокамер включает в себя следующие операции: полученные видеофайлы загружают в программу поочередно, выбирают экранную систему координат «Coordinate System», ось OY устанавливают таким образом, чтобы ей были перпендикулярны полосы на тарировочном щите; для отметки координат каждой из полос тарировочного щита в программе выбирают маркер «massA», осуществляют «скалывание» точек координат, после «скалывания» черно-белых полосок тарировочного щита снизу вверх по шкале OY «Coordinate System» получают таблицу точек координат, которую затем переносят в таблицу Excel, каждому экранному значению координат сопоставляют значение «реальных» значений на тарировочном щите или нивелирной рейке, затем строят диаграмму зависимости экранных координат к реальным значениям тарировочного щита, строят линию тренда, «полиномиальная» 2 или 3 степени, с отображением математической формулы на диаграмме, готовят таблицу в программе Excel с применением полученной формулы для обработки видеоматериалов испытаний.
5. Способ по п. 1, отличающийся тем, что на основании полученной информации в дальнейшем готовят инструкции для пилотов, и/или производят регулировку колонки несущего винта, и/или проверяют лопасти на стендах, и/или делают заключение о состоянии лопастей.
6. Устройство для измерения махового движения, соконусности и сближения лопастей несущих винтов летательных аппаратов для реализации способа по п. 1, содержащее видеокамеры и средство их крепления, отличающееся тем, что устройство выполнено в виде хомута (1), состоящего из по меньшей мере двух частей, закрепленных между собой болтовым соединением, на хомуте (1) жестко закреплены корпуса (2), снабженные отверстиями и крышками и выполненные с возможностью размещения в них видеокамер (3), на хомуте (1) закреплены крепежные элементы для установки балансировочных грузов.
7. Устройство по п. 6, отличающееся тем, что хомут (1) закреплен на токосъемнике нижнего несущего винта вертолета, при этом части хомута (1) выполнены дугообразной формы, из металла, изнутри покрыты уплотнительным слоем.
8. Устройство по п. 6, отличающееся тем, что количество корпусов (2) и видеокамер (3) равно количеству объектов наблюдения.
9. Устройство по п. 6, отличающееся тем, что каждый корпус (2) приварен к хомуту (1), при этом установлен таким образом, что размещенная в нем видеокамера (3) направлена на объект наблюдения.
| 0 |
|
SU156047A1 | |
| 0 |
|
SU156329A1 | |
| Устройство для защиты электромагнитов от перегрева | 1954 |
|
SU101185A1 |
| Станок для испытания режущей способности напильников | 1951 |
|
SU93777A1 |
| CN 105716837 B, 17.04.2018 | |||
| DE 102011001268 A1, 20.09.2012. | |||

