Область техники, к которой относится изобретение
Настоящее изобретение относится к способам и устройствам для автоматического планирования внутричелюстного зубного имплантата, например, с учетом биомеханических, эстетических и/или функциональных соображений, а также к компьютерным способам, компьютерным системам и программному обеспечению для осуществления способов.
Обзор состояния техники
Внутричелюстной зубной имплантат является искусственным корнем зуба, который парадонтологи ставят в челюсть для фиксации вставного зуба или опоры вставного протеза. Постановка внутричелюстных зубных имплантатов широко распространена и дает ряд преимуществ над другими методами, например частично съемными зубными протезами, мостами или съемными протезами. Внутричелюстные зубные имплантаты позволяют восстанавливать зубочелюстную систему без обязательного ущерба для здоровых соседних зубов. Нагрузки, передаваемые через имплантаты, стимулируют кость, что предотвращает резорбцию кости и ограничивает рецессию десен вокруг вставных элементов зуба и в результате обеспечивает более эстетичное восстановление. Постановка имплантатов обеспечивает также более удобное и стабильное решение, чем традиционные зубные протезы, с гарантированными более естественным прикусом и способностью к пережевыванию.
Планирование хирургической операции для установки внутричелюстного зубного имплантата традиционно использует, по меньшей мере, один способ медицинской визуализации, например ортопантомограмму (т.е. рентгеновский способ визуализации костей челюстей и зубов) или компьютерную томографию (СТ) для проверки величины и качества кости. Фактически Американская ассоциация оральной и челюстно-лицевой радиологии (AAOMR) рекомендует, чтобы для установки имплантата применяли какую-то форму поперечной визуализации. Однако по классической рабочей технологии окончательное решение относительно положений имплантата принимается во время хирургической операции, когда вскрытие окружающей мягкой ткани обнажает кость. По окончании периода оссеоинтеграции от 3 до 6 месяцев выполняют вспомогательные, в основном угловые, исправления направления имплантатов для оптимизации эстетических характеристик восстановления. Тем не менее, конструкция конечного протеза, опирающегося на имплантат, определяется в значительной степени начальными положениями имплантатов, которые могут быть близкими к оптимальным с эстетической, функциональной и биомеханической точки зрения.
Классическое решение больше не годится при тенденции к немедленному нагружению имплантата. Немедленное нагружение имплантатов требует безупречного планирования и точного хирургического переноса. Такое планирование предпочтительно, помимо биомеханических обоснований, уже учитывает эстетические и/или функциональные соображения, которые при применении традиционных способов имплантологии имели значение только на стадии реального протезирования при постановке имплантата.
За последние несколько лет налажен промышленный выпуск нескольких инструментов для снабжения парадонтологов средством для оценки кости пациента в нескольких различным образом ориентированных срезах объемного сканированного изображения, например компьютерно-томографического (СТ) изображения или других объемных сканированных изображений, например MRI (магниторезонансных), и для графического наложения на визуальные образы коммерческих имплантатов разной длины, диаметра и марки (смотри SimPlant™, поставляемый компанией Materialise, Leuven, Бельгия). Можно сослаться на Бенджамина (Benjamin) «Многоплоскостная СТ с реформатированием стала самым сложным и точным вспомогательным средством для планирования установки имплантата» («Multi-planar reformatted CT has become the most comprehensive and accurate aid for implant treatment planning») (смотри Benjamin LS, The evolution of multiplanar diagnostic imaging: predictable transfer of preoperative analysis to the surgical site. J Oral Implantol. 2002, 28 (3): 135-44).
В соответствии с текущим состоянием данной области техники установка пациенту внутричелюстных зубных имплантатов состоит из ряда этапов. Перед установкой сначала применяют шарнирно-поворотные гипсовые модели для оценки вертикального размера. Затем создают диагностическую восковую зуботехническую модель для представления заданного конечного результата протезирования (смотри фиг.1). Диагностическую восковую зуботехническую модель оптимизируют для обеспечения правильного прикуса, морфологии, эстетических и фонетических особенностей. На следующем этапе изготавливают шаблон для сканирования или протез для сканирования (смотри фиг.2). Это - точная реплика диагностической восковой зуботехнической модели, выполненная из рентгенонепрозрачного материала, обычно смолы низкотемпературной полимеризации, смешанной с сульфатом бария в некоторой концентрации. Уровень непрозрачности протеза для сканирования может изменяться в его составляющих частях; например, зубы могут иметь более высокую непрозрачность, чем базисная пластинка. При желании некоторые части могут быть сделаны радиопрозрачными. Когда пациента сканируют с протезом для сканирования во рту, радионепрозрачные части будут четко видными на СТ-изображениях (смотри фиг.3). В некоторых случаях главная ось каждого восстановительного элемента, например зуба, отмечена сверлением цилиндрического ствола. Введение шаблона для сканирования в СТ-изображения повышает возможности хирурга по планированию функций результирующего протеза.
После изготовления шаблона для сканирования пациента направляют к рентгенологу для СТ-сканирования. Шаблон для сканирования помещают в рот пациента и выполняют сканирование. На выходе сканирования получают пакет 2-мерных срезов, формирующих трехмерный «набор данных».
После того как получено сканированное СТ-изображение и построены 3-мерные модели (смотри фиг.4), хирург планирует установку имплантата с помощью компьютерной программы. Обычно подобная программа импортирует набор данных, предоставляемых радиологическим отделом без изменения какой-либо информации. При применении методов обработки изображений (например, сегментации изображений) из набора данных получают трехмерные модели кости. При условии, что рентгенонепрозрачная зубочелюстная система хорошо представлена на 2-мерных осевых срезах, можно также построить 3-мерную модель желательной схемы протеза.
Вместо применения рентгенонепрозрачного протеза для сканирования иногда диагностическую восковую зуботехническую модель или съемный протез оцифровывают отдельно (посредством СТ, оптического сканирования или механического сканирования) и затем совмещают с анатомическими структурами, видимыми в объемных данных. Тем самым получают также информацию о желаемой зубочелюстной системе при правильном ее расположении относительно челюсти. Компьютерная программа (смотри фиг.5) позволяет оценивать СТ-изображения отдельных пациентов в трехмерном пространстве и определять, когда внутричелюстные зубные имплантаты допускают идеальную установку. Имплантаты можно выбирать из цифровой библиотеки имплантатов (имплантатов разных марок, с разными длинами, диаметрами и т.п.).
Далее практикующий врач определяет панорамную кривую в осевых изображениях (смотри фиг.6). Кривая обычно следует дуге челюстей. Можно выбрать несколько сечений (смотри фиг.7), перпендикулярных как панорамной кривой, так и осевым срезам. Места размещения имплантата обычно выбирают в упомянутых сечениях. Практикующий врач может изменять положения и наклоны каждого имплантата, при необходимости, на любом из видов (осевом, панорамном, 3-мерном или в сечении). Точную регулировку выполняют сдвигом и наклоном образов имплантатов или изменением их размеров. Положение каждого отдельного имплантата можно оценивать с учетом объема существующей кости, характеризуемого Ганзом как «треугольник кости» (Ganz SD, The triangle of bone - A formula for successful Implant Placement and Restoration, The implant society. Inc. 1995 Vol. (5); 5 pp. 2-6). Качество кости визуализируется компьютерной программой с использованием, например, единиц Хаунсфилда (Hounsfield) в качестве критерия плотности костей.
После того как определен план имплантата, хирург должен как можно точнее перенести его на пациента. Такой перенос можно выполнить мысленно, с использованием специально изготовленных шаблонов, например, поставляемых компанией Materialise, Leuven, Бельгия, под названиями SurgiGuide™ (смотри фиг.8) или с использованием альтернативных средств привязки.
Хотя все современные компьютерные программы для планирования внутричелюстного зубного имплантата визуализируют информацию, необходимую для моделирования разных вариантов установки имплантатов и обеспечивают множество инструментальных средств оценки, ни одна не обеспечивает автоматизированной или полуавтоматизированной поддержки при определении оптимального положения имплантатов с биомеханической, функциональной или эстетической точки зрения.
Сущность изобретения
Первой задачей настоящего изобретения является создание усовершенствованных способов для (полу)автоматического планирования внутричелюстного зубного имплантата с учетом биомеханических, функциональных или эстетических соображений с использованием объемных данных, например, из объемного сканированного изображения. Преимущество настоящего изобретения заключается в устранении, по меньшей мере, некоторых недостатков известного уровня техники.
В соответствии с первым вариантом осуществления в связи с упомянутой первой задачей способ подготовки информации для автоматизированного планирования внутричелюстного зубного имплантата по изобразительной информации, относящейся к челюсти пациента, содержит следующие этапы:
(a) формируют 3-мерные модели зубного ряда, и
(b) автоматически находят основные восстановительные элементы в зубном ряду.
Автоматическое определение восстановительных элементов в зубном ряду можно выполнять на основе анализа изображений, например на основе полутоновых значений в 3-мерной модели зубного ряда. В альтернативном варианте автоматическое определение восстановительных элементов в зубном ряду можно выполнять с использованием 3-мерной модели зубного ряда и поиска на основе анализа кривизны поверхности. Восстановительные элементы являются искусственными зубами и т.п. Выражение «анализ изображений» следует понимать как извлечение полезной информации из обрабатываемых изображений, допускающих отображение, предпочтительно из цифровых изображений, методами обработки изображений, предпочтительно, методами цифровой обработки изображений. Изображения объекта могут содержать 2-мерные срезы объекта, содержащие полутоновую информацию, а также любое 3-трехмерное представление, обеспечивающее понимание пространственного построения объекта.
В соответствии со вторым вариантом осуществления в связи с упомянутой первой целью способ подготовки информации для автоматизированного планирования внутричелюстного зубного имплантата по изобразительной информации, относящейся к челюсти пациента, содержит следующие этапы:
(а) формируют 3-мерные модели частей челюсти, и
(b1) находят анатомические и искусственные элементы в челюстной кости, и
(b2) автоматически выбирают зоны в челюсти, в которых можно или невозможно установить имплантаты.
Выбор можно выполнять анализом изображений, например, на основе полутоновых значений в 3-мерной модели частей челюсти. Анатомические элементы, подлежащие поиску, могут представлять собой нервы, кровеносные сосуды, цисты, ретенированные зубы, костный мозг, пораженную кость или аналогичные элементы.
Искусственные элементы могут представлять собой коронки, мосты на имплантатах, пломбы, трансплантаты, титановые мембраны и т.п.
В соответствии с некоторыми вариантами осуществления настоящего изобретения способ может дополнительно содержать следующие этапы:
(c) определяют подходящие размеры, положения, ориентации и конфигурации имплантата,
(d) получают планы имплантата,
(e) сравнивают планы имплантата между собой или с заданными критериями,
(f) выбирают или совершенствуют план имплантата.
В соответствии с некоторыми вариантами осуществления настоящего изобретения способ может дополнительно содержать следующие этапы:
- формируют 3-мерные модели частей челюсти,
- находят анатомические и искусственные элементы в челюстной кости на основе полутоновых значений в 3-мерной модели частей челюсти и автоматически выбирают зоны в челюсти, в которых можно или невозможно установить имплантаты,
- определяют подходящие размеры, положения, ориентации и конфигурации потенциального имплантата,
- получают планы имплантата,
- сравнивают планы имплантата между собой или с заданными критериями, и
- выбирают или совершенствуют план имплантата.
В соответствии с некоторыми вариантами осуществления настоящего изобретения этап формирования 3-мерных моделей зубного ряда может дополнительно заключаться в том, что раздельно оцифровывают желательный зубной ряд и позиционируют его надлежащим образом относительно челюсти посредством совмещения.
В соответствии с некоторыми вариантами осуществления настоящего изобретения этап формирования 3-мерных моделей зубного ряда может дополнительно заключаться в том, что позиционируют и масштабно преобразуют зубы или зубные дуги из цифровой библиотеки относительно челюсти пациента в объемных изображениях или 3 измерениях.
В соответствии с некоторыми вариантами осуществления настоящего изобретения на этапе формирования 3-мерных моделей частей челюсти можно обнаруживать объекты изображения, соответствующие собственным или искусственным зубам в челюсти.
В соответствии с некоторыми вариантами осуществления настоящего изобретения этап формирования 3-мерных моделей частей челюсти может содержать следующие этапы:
- разделяют 3-мерную модель челюсти на несколько 2-мерных изображений срезов,
- формируют панорамную кривую для каждого из 2-мерных изображений срезов,
- оценивают в каждом изображении среза, присутствует ли, по меньшей мере, один 2-мерный характерный элемент вдоль панорамной кривой, и
- объединяют информацию о нескольких срезах для подтверждения присутствия зуба.
В соответствии с некоторыми вариантами осуществления настоящего изобретения этап формирования панорамной кривой может заключаться в том, что панорамную кривую вычисляют как среднюю линию контура в срезе челюсти.
В соответствии с некоторыми вариантами осуществления настоящего изобретения этап оценки может заключаться в том, что вычисляют значение корреляции между 2-мерными матрицами или характерными элементами, представляющими возможные формы сечений зуба или корня зуба, и полутонами в локальных областях 2-мерных изображений срезов вдоль панорамной кривой.
В соответствии с некоторыми вариантами осуществления настоящего изобретения этап формирования 3-мерных моделей частей челюсти может дополнительно содержать идентификацию зон челюсти, соответствующих положениям отдельных зубов, и приписывание идентифицированным зонам соответствующих номеров зубов на основе значений средней ширины зубов и известных размеров челюсти. Возможно идентифицированные зоны можно скорректировать на основе известных положений собственных или искусственных зубов.
В соответствии с некоторыми вариантами осуществления настоящего изобретения этап поиска восстановительных элементов в зубном ряду может заключаться в том, что вычисляют локальные значения кривизны поверхностей 3-мерной модели зубного ряда и разделяют зубной ряд на менее сложные области или отрезки с использованием граничного алгоритма на основе полученных значений кривизны.
В соответствии с некоторыми вариантами осуществления настоящего изобретения этап поиска восстановительных элементов в зубном ряду может заключаться в том, что вычисляют значения корреляции между 3-мерными матрицами или характерными элементами, представляющими возможные формы зубов, и локальными областями поверхности на 3-мерной модели зубного ряда и отделяют те области поверхности, на которых корреляционное значение превышает заданный порог.
В соответствии с некоторыми вариантами осуществления настоящего изобретения этап определения подходящих размеров, положений, ориентаций и конфигураций имплантата может содержать следующие этапы:
- задают координатные точечные сетки на соответственно резцовых/окклюзионных и апикальный сторонах восстановительных элементов,
- соединяют для каждого элемента все точки резцовой/окклюзионной координатной сетки со всеми точками апикальной координатной сетки,
- определяют точки пересечения полученных осей с 3-мерной моделью кости,
- помещают имплантаты из цифровой библиотеки имплантатов вдоль соответствующих осей так, что уступы имплантатов находятся на заданном расстоянии от точек входа осей в кость,
- составляют список всех возможных комбинаций от минимум одного набора альтернатив для одного имплантата для всего зубного ряда до максимум всех альтернатив для имплантата для каждого восстановительного элемента в зубном ряду.
Возможно в соответствии с некоторыми вариантами осуществления настоящего изобретения на этапе задания координатных точечных сеток возможно применение операций формирования полостей на восстановительных элементах для создания 3-мерных объемов, характеризующих структуру металлического базиса протеза. Упомянутые объемы можно проецировать на 3-мерную модель восстановительных элементов для задания наружных контуров упомянутых резцовой/окклюзионной и апикальной координатных точечных сеток.
В соответствии с некоторыми вариантами осуществления настоящего изобретения на этапе задания координатных точечных сеток контуры проекций восстановительных элементов можно определять в резцовой/окклюзионной и апикальной плоскостях, заданных в точках пересечения восстановительных элементов с их соответствующими апикально-резцовыми осями, при этом спроецированные контуры смещают внутрь с обеспечением смещенного контура, замкнутая область поверхности смещенного контура в 2 измерениях является заданной долей исходной поверхности спроецированной области контура, и затем смещенный контур проецируют обратно на восстановительные элементы для получения контуров упомянутых координатных точечных сеток.
В соответствии с некоторыми вариантами осуществления настоящего изобретения проецирование можно выполнять по направлению соответствующих апикально-резцовых осей. В соответствии с некоторыми вариантами осуществления настоящего изобретения апикально-резцовую ось восстановительного элемента можно определить как его главную ось инерции.
В соответствии с некоторыми вариантами осуществления настоящего изобретения на этапе определения подходящих размеров, положений, ориентаций и конфигураций имплантата применяют экспертную систему для идентификации типа случая установки имплантата и для рекомендации типичного соответствующего плана имплантата на основе решений с «наилучшей подгонкой» в экспертной системе.
В соответствии с некоторыми вариантами осуществления настоящего изобретения этап получения планов имплантатов заключается в том, что присваивают балльные показатели комбинации(ям) имплантатов в зависимости от результатов измерений, выполненных по объемным изображениям пациента или 3-мерным моделям, созданным на этапе формирования 3-мерных моделей зубного ряда или частей челюсти. В соответствии с некоторыми вариантами осуществления настоящего изобретения можно вычислить кратчайшие расстояния между имплантатами и 3-мерными моделями нерва, кровеносных сосудов и челюсти и при этом средние полутоновые значения элементов трехмерного изображения, занимаемые имплантатами и в непосредственной близости от них, определяют вдоль осей имплантатов.
В соответствии с некоторыми вариантами осуществления настоящего изобретения этап получения планов имплантатов может заключаться в том, что присваивают балльные показатели комбинации(ям) имплантатов в зависимости от предвычисленных нагрузок на имплантаты с использованием биомеханической или конечно-элементной модели челюсти, имплантатов и протеза. Возможно в соответствии с некоторыми вариантами осуществления настоящего изобретения этап получения планов имплантатов может заключаться в том, что присваивают балльные показатели комбинации(ям) имплантатов в зависимости от достижимых выступающих профилей для отдельных имплантатов. Возможно достижимый выступающий профиль можно выразить в виде функции от расстояния в сечении между самой буккальной точкой уступа имплантата и осью через самую буккальную точку апикальной координатной точечной сетки в сечении и точку, находящуюся на заданных апикальных и лингвальных расстояниях от упомянутой точки, при этом апикальные и лингвальные расстояния предпочтительно могут составлять соответственно 3 мм и 2 мм для передних зубов и 1 мм и 2 мм для боковых зубов. В соответствии с некоторыми вариантами осуществления настоящего изобретения различие между передними и боковыми зубами можно создать обозначением линии улыбки в объемных изображениях или на 3-мерных моделях.
В соответствии с некоторыми вариантами осуществления настоящего изобретения этап сравнения планов имплантатов между собой или с заданными критериями может дополнительно заключаться в том, что постепенно регулируют размеры, положения и ориентации отдельных имплантатов в соответствии с заданной стратегией, пока балльный показатель плана не достигает заданного порогового значения.
В соответствии с некоторыми вариантами осуществления настоящего изобретения автоматическое или полуавтоматическое планирование внутричелюстного зубного имплантата заключается в том, что применяют, по меньшей мере, один автоматизированный способ для определения или проверки оптимальных величины, размеров, положения, направления и конфигурации внутричелюстных зубных имплантатов в кости пациента. Упомянутые способы являются компьютеризованными и предпочтительно однозначными. Способы основаны на предварительно установленных правилах, которые связаны с биомеханическими соображениями (например, величины кости, качества кости и т.п.) и эстетическими соображениями (например, формой зуба, выступающим профилем и т.п.).
В соответствии с настоящим изобретением (полу)автоматическое планирование и моделирование хирургической операции можно осуществлять с использованием компьютера. Соответственно, пациентов можно сканировать для получения 3-мерных данных объемного изображения. Компьютеризированную автоматическую или полуавтоматическую виртуальную установку имплантата можно выполнять на модели челюсти, полученной в компьютере. Затем планирование можно переносить на пациента с помощью хирургического шаблона.
В соответствии с признаком настоящего изобретения присутствие и положения зубов (например, собственных или искусственных) автоматически опознаются в объемных данных изображения пациента или на трехмерной модели челюсти. В этом случае видно, где можно найти зубы. И, наоборот, в этом случае можно идентифицировать отсутствующие зубы и заменять их имплантатами.
Другим признаком настоящего изобретения является то, что размеры, положения и направления имплантата автоматически или полуавтоматически предлагаются и/или проверяются на основании известного положения протезного элемента относительно кости пациента.
Признаком настоящего изобретения является также то, что размеры, положения, направления и конфигурации имплантатов (т.е. взаимное расположение имплантатов) автоматически предлагаются и/или проверяются по известной 3-мерной геометрии кости пациента и/или на основании математических, биомеханических вычислений с учетом измеренного качества кости, измеренного в виде полутоновых значений в объемных данных изображения пациента.
Важное преимущество настоящего изобретения состоит в том, что врачи, по существу, получают поддержку в ходе принятия решений при лечении благодаря однозначным директивам, разработанным специально для пациента. Изобретение дает также большую экономию времени при условии, что большое число критериев можно проверять за часть того времени, которое потребовалось бы при ручной проверке.
Второй задачей настоящего изобретения является создание системы для подготовки информации для (полу)автоматического планирования внутричелюстного зубного имплантата с учетом биомеханических, эстетических и функциональных соображений с использованием объемных данных, например, из объемного сканированного изображения.
В соответствии с первым вариантом осуществления в связи со второй задачей настоящего изобретения система для подготовки информации для автоматизированного или полуавтоматизированного планирования внутричелюстного зубного имплантата по изобразительной информации, относящейся к челюсти пациента, содержит:
(a) средство для формирования 3-мерной модели зубного ряда, и
(b) средство для автоматического поиска восстановительных элементов в зубном ряду на основе анализа изображений.
Средство для автоматического поиска восстановительных элементов в зубном ряду может автоматически находить основные восстановительные элементы в зубном ряду на основе полутоновых значений в 3-мерной модели зубного ряда. В альтернативном варианте средство для автоматического поиска восстановительных элементов в зубном ряду может автоматически находить основные восстановительные элементы в зубном ряду с использованием 3-мерной модели зубного ряда и поиска на основе анализа кривизны поверхности.
В соответствии с первым вариантом осуществления в связи со второй задачей настоящего изобретения система для подготовки информации для автоматизированного или полуавтоматизированного планирования внутричелюстного зубного имплантата по изобразительной информации, относящейся к челюсти пациента, содержит:
(a) средство для формирования 3-мерных моделей частей челюсти, и
(b средство для поиска анатомических и искусственных элементов в челюстной кости и для автоматического выбора зон в челюсти, в которых можно или невозможно установить имплантаты, на основе анализа изображений.
Поиск может быть основан на полутоновых значениях в 3-мерной модели частей челюсти.
В соответствии с вариантами осуществления настоящего изобретения система может дополнительно содержать:
(c) средство для определения подходящих размеров, положений, ориентаций и конфигураций потенциального имплантата,
(d) средство для получения планов имплантата,
(e) средство для сравнения планов имплантатов между собой или с заданными критериями,
(f) средство для выбора или совершенствования плана имплантата.
В соответствии с вариантами осуществления настоящего изобретения система может дополнительно содержать:
средство для формирования 3-мерных моделей частей челюсти,
средство для поиска анатомических и искусственных элементов в челюстной кости на основе полутоновых значений в 3-мерной модели частей челюсти и для автоматического выбора зон в челюсти, в которых можно или невозможно ставить имплантаты,
средство для поиска восстановительных элементов в зубном ряду,
средство для определения подходящих размеров, положений, ориентаций и конфигураций потенциальных имплантатов,
средство для получения планов имплантатов,
средство для сравнения планов имплантатов между собой или с заданными критериями, и
средство для выбора или совершенствования плана имплантата.
В соответствии с вариантами осуществления настоящего изобретения средство для формирования 3-мерных моделей зубного ряда может дополнительно содержать средство для раздельного оцифровывания заданного зубного ряда и позиционирования его надлежащим образом относительно челюсти посредством совмещения.
В соответствии с вариантами осуществления настоящего изобретения средство для формирования 3-мерных моделей зубного ряда может дополнительно содержать средство для позиционирования и масштабного преобразования зубов или зубных дуг из цифровой библиотеки относительно челюсти пациента в объемных изображениях или 3 измерениях.
В соответствии с вариантами осуществления настоящего изобретения средство для формирования 3-мерных моделей частей челюсти может отличаться тем, что обнаруживаются объекты изображения, соответствующие собственным или искусственным зубам в челюсти.
В соответствии с вариантами осуществления настоящего изобретения средство для формирования 3-мерных моделей частей челюсти может содержать:
средство для разделения 3-мерной модели челюсти на несколько 2-мерных изображений срезов,
средство для формирования панорамной кривой для каждого из 2-мерных изображений среза,
средство для оценки в каждом изображении сечения, присутствует ли, по меньшей мере, один 2-мерный характерный элемент вдоль панорамной кривой, и
средство для объединения информации о нескольких срезах для подтверждения присутствия зуба.
В соответствии с вариантами осуществления настоящего изобретения средство для формирования панорамной кривой может вычислять панорамную кривую как среднюю линию контура в срезе челюсти.
В соответствии с вариантами осуществления настоящего изобретения средство для оценки может содержать средство для вычисления значения корреляции между 2-мерными матрицами или характерными элементами, представляющими возможные формы сечений зуба или корня зуба, и полутонами в локальных областях CT-изображений срезов вдоль панорамной кривой.
В соответствии с вариантами осуществления настоящего изобретения средство для формирования 3-мерных моделей частей челюсти может дополнительно содержать средство для идентификации зон челюсти, соответствующих положениям отдельных зубов, и приписывания их соответствующим номерам зубов на основе значений средней ширины зубов и известных размеров челюсти. Идентифицированные зоны можно скорректировать на основе известных положений собственных или искусственных зубов.
В соответствии с вариантами осуществления настоящего изобретения средство для поиска восстановительных элементов в зубном ряду может содержать средство для вычисления локальных значений кривизны поверхностей 3-мерной модели зубного ряда и разделения зубного ряда на менее сложные области или отрезки с использованием граничного алгоритма на основе полученных значений кривизны.
В соответствии с вариантами осуществления настоящего изобретения средство для поиска восстановительных элементов в зубном ряду может содержать средство для вычисления значений корреляции между 3-мерными матрицами или характерными элементами, представляющими возможные формы зубов, и локальными областями поверхности на 3-мерной модели зубного ряда и отделения тех областей поверхности, на которых корреляционное значение превышает заданный порог.
В соответствии с вариантами осуществления настоящего изобретения средство для определения подходящих размеров, положений, ориентаций и конфигураций имплантата содержит:
средство для задания координатных точечных сеток на соответственно резцовых/окклюзионных и апикальных сторонах восстановительных элементов, средство для соединения для каждого элемента всех точек резцовой/окклюзионной координатной сетки со всеми точками апикальной координатной сетки, средство для определения точек пересечения полученных осей с 3-мерной моделью кости, средство для помещения имплантатов из цифровой библиотеки имплантатов вдоль соответствующих осей так, что уступы имплантатов находятся на заданном расстоянии от точек входа осей в кость, средство для составления списка всех возможных комбинаций от минимум одного набора альтернатив для одного имплантата для всего зубного ряда до максимум всех альтернатив для имплантата для каждого восстановительного элемента в зубном ряду. В соответствии с вариантами осуществления настоящего изобретения средство для задания координатных точечных сеток может содержать средство для выполнения операций формирования полостей на восстановительных элементах для создания 3-мерных объемов, характеризующих структуру металлического базиса искомого протеза, и средство для проецирования объемов на 3-мерную модель восстановительных элементов для задания наружных контуров упомянутых резцовой/окклюзионной и апикальной координатных точечных сеток. Средство для задания контуров проекций координатных точечных сеток восстановительных элементов может содержать средство для определения в резцовой/окклюзионной и апикальной плоскостях, заданных в точках пересечения восстановительных элементов с их соответствующими апикально-резцовыми осями, при этом спроецированные контуры смещают внутрь с обеспечением смещенного контура и замкнутая область поверхности смещенного контура в 2 измерениях является заданной долей исходной поверхности спроецированной области контура, а затем смещенный контур проецируют обратно на восстановительные элементы для получения контуров упомянутых координатных точечных сеток. Проецирование можно выполнять по направлению соответствующих апикально-резцовых осей. Апикально-резцовую ось восстановительного элемента можно определить как его главную ось инерции.
В соответствии с вариантами осуществления настоящего изобретения средство для определения подходящих размеров, положений, ориентаций и конфигураций имплантата может содержать экспертную систему для идентификации типа случая установки имплантата и для рекомендации типичного соответствующего плана имплантата на основе решений «наилучшей подгонки» в экспертной системе. Возможно средство для получения планов имплантатов содержит средство для присвоения балльных показателей комбинации(ям) имплантатов в зависимости от результатов измерений, выполненных по объемным изображениям пациента или 3-мерным моделям, созданным на этапе создания 3-мерных моделей зубного ряда или частей челюсти. Можно вычислить кратчайшие расстояния между имплантатами и 3-мерными моделями нерва, кровеносных сосудов и челюсти и при этом средние полутоновые значения элементов трехмерного изображения, занимаемые имплантатами и в непосредственной близости от них, определяют вдоль осей имплантатов.
В соответствии с вариантами осуществления настоящего изобретения средство для получения планов имплантатов может содержать средство для присвоения балльных показателей комбинации(ям) имплантатов в зависимости от предварительно вычисленных нагрузок на имплантаты с использованием биомеханической или конечно-элементной модели челюсти, имплантатов и протеза.
В соответствии с вариантами осуществления настоящего изобретения средство для получения планов имплантатов может содержать средство для присвоения балльных показателей комбинации(ям) имплантатов в зависимости от достижимых выступающих профилей для отдельных имплантатов. Достижимый выступающий профиль можно выразить в виде функции от расстояния в сечении между самой буккальной точкой уступа имплантата и осью через самую буккальную точку апикальной координатной точечной сетки в сечении и точку, находящуюся на заданных апикальных и лингвальных расстояниях от упомянутой точки. Апикальные и лингвальные расстояния предпочтительно могут составлять соответственно 3 мм и 2 мм для передних зубов и 1 мм и 2 мм для боковых зубов. Различие между передними и боковыми зубами можно создать обозначением линии улыбки в объемных изображениях или на 3-мерных моделях.
В соответствии с вариантами осуществления настоящего изобретения средство для сравнения планов имплантатов между собой или с заданными критериями может дополнительно содержать средство для постепенного регулирования размеров, положений и ориентаций отдельных имплантатов в соответствии с заданной стратегией, пока балльный показатель плана не достигает заданного порогового значения.
Вышеописанные варианты осуществления способа в соответствии с настоящим изобретением можно реализовать в системе, например системе 100 обработки, например, показанной на фиг. 30. На фиг. 30 представлена одна конфигурация системы 100 обработки, которая содержит, по меньшей мере, один программируемый процессор 103, связанный с запоминающей подсистемой 105, которая содержит память, по меньшей мере, одного типа, например RAM (оперативную память), ROM (постоянную память) и т.д. Следует отметить, что процессор 103 (или процессоры) может быть универсальным или специализированным процессором и может быть предназначен для встраивания в устройство, например интегральную схему, которая содержит другие компоненты, которые выполняют другие функции. Таким образом, по меньшей мере, аспект настоящего изобретения можно реализовать в цифровой электронной схеме или в компьютерных аппаратных, программно-аппаратных, программных средствах или в их комбинации. Система обработки может содержать запоминающую подсистему 107, которая содержит, по меньшей мере, один дисковод, и/или дисковод для CD-ROM, и/или дисковод для DVD. В некоторых вариантах реализации для обеспечения пользователя возможностью ручного ввода информации в состав подсистемы 109 пользовательского интерфейса могут входить отображающая система, клавиатура и координатно-указательное устройство. В состав системы могут также входить порты для ввода и вывода данных. В состав системы могут также входить многие элементы, например сетевые соединения, интерфейсы сопряжения с различными устройствами и т.д., не показанные на фиг. 30. Различные элементы системы 100 обработки могут быть связаны различными способами, например по шинной подсистеме 113, показанной на фиг. 30, для простоты, в виде одиночной шины, но как должно быть ясно техническим специалистам, содержащей систему, по меньшей мере, одной шины. Память запоминающей подсистемы 105 иногда может содержать часть набора или полностью набор (в любом случае, обозначенные позицией 111) команд, которые при исполнении на системе 100 обработки реализуют этапы вариантов осуществления способа, описанного в настоящей заявке. Таким образом, хотя система 100 обработки, например, показанная на фиг. 30, известна в технике, система, которая содержит команды для реализации аспектов способов для получения информации или для оптимизации литографической обработки подложки, не относится к известному уровню техники и поэтому фиг. 30 не обозначена как известный уровень техники.
Настоящее изобретение включает в себя также компьютерный программный продукт, который обеспечивает функциональные средства для любого из способов в соответствии с настоящим изобретением, при исполнении на компьютерном устройстве. Упомянутый компьютерный программный продукт может быть реально осуществлен в машиночитаемом информационном носителе информации, содержащем машиночитаемый код для исполнения программируемым процессором. Следовательно, настоящее изобретение относится к машиночитаемому информационному носителю, содержащему компьютерный программный продукт, который, при исполнении на компьютерном средстве, обеспечивает команды для исполнения любых вышеописанных способов. Термин «машиночитаемый информационный носитель» относится к любой среде, которая участвует в обеспечении инструкций для исполнения процессором. Данный носитель может иметь любые формы, включая, но без ограничения, энергонезависимый носитель и среду передачи данных. Энергонезависимый носитель содержит, например, оптические или магнитные диски, например запоминающее устройство, которое является частью запоминающего устройства большой емкости. Общие формы компьютерно читаемых носителей содержат CD-ROM, DVD, гибкий диск или дискету, ленту, интегральную схему памяти или кассетное запоминающее устройство, или любой другой носитель, который может считываться компьютером. Разнообразные формы компьютерно читаемых носителей могут участвовать в хранении, по меньшей мере, одной последовательности из, по меньшей мере, одной инструкции для исполнения процессором. Компьютерный программный продукт может также передаваться на несущем сигнале по сети, например LAN (локальной сети), WAN (глобальной сети) или сети Internet. Среды передачи данных могут быть в виде акустических или световых волн, например волн, генерируемых во время передачи данных на радио- или инфракрасных частотах. Среды передачи данных включают в себя коаксиальные кабели, медные провода и волоконную оптику, включая провода, которые составляют шину в компьютере.
В соответствии с третьим аспектом настоящего изобретения предлагается компьютерный программный продукт, содержащий код для подготовки информации для автоматизированного или полуавтоматизированного планирования внутричелюстного зубного имплантата по изобразительной информации, относящейся к челюсти пациента, который при исполнении в компьютерной системе содержит:
(a) средство для формирования 3-мерных моделей зубного ряда, и
(b) средство для автоматического поиска основных восстановительных элементов в зубном ряду на основе анализа изображений.
Средство для автоматического поиска основных восстановительных элементов в зубном ряду может автоматически находить основные восстановительные элементы в зубном ряду на основе полутоновых значений в 3-мерной модели зубного ряда. В альтернативном варианте средство для автоматического поиска восстановительных элементов в зубном ряду может автоматически находить основные восстановительные элементы в зубном ряду с использованием 3-мерной модели зубного ряда и поиска на основе анализа кривизны поверхности.
В соответствии с некоторыми вариантами осуществления настоящего изобретения предлагается компьютерный программный продукт, содержащий код для подготовки информации для автоматизированного или полуавтоматизированного планирования внутричелюстного зубного имплантата по изобразительной информации, относящейся к челюсти пациента, который при исполнении в компьютерной системе содержит:
(a) средство для формирования 3-мерных моделей частей челюсти, и
(b) средство для поиска анатомических и искусственных элементов в челюстной кости и для автоматического выбора зон в челюсти, в которых можно или невозможно ставить имплантаты, на основе анализа изображений.
Анализ изображений может быть таким, что поиск основан на полутоновых значениях в 3-мерной модели частей челюсти. При желании компьютерный программный продукт может содержать код для обеспечения любого из средств в любой из систем в соответствии со второй целью настоящего изобретения.
В соответствии с четвертой задачей настоящего изобретения предлагается машиночитаемый информационный носитель, хранящий компьютерный программный продукт в соответствии с третьей задачей настоящего изобретения.
Данные и дополнительные цели, признаки и преимущества изобретения очевидны из нижеследующего подробного описания, которое содержит ссылки на фигуры на прилагаемых чертежах.
Краткое описание фигур
Описанные чертежи являются всего лишь схематическими и не ограничивающими. Для наглядности размеры некоторых элементов на чертежах могут быть преувеличенными и приведенными не в масштабе.
На фиг. 1 представлена диагностическая восковая зуботехническая модель, выполненная для представления искомого зубного ряда;
На фиг. 2 представлен протез для сканирования, который устанавливают в рот пациента во время CT-сканирования и содержит несколько рентгенонепрозрачных элементов;
На фиг. 3 представлен осевой CT-срез с рентгенонепрозрачным зубным рядом, видимым в изображении;
На фиг. 4 представлены 3-мерные модели лишенной зубов челюсти (2), соответствующего зубного ряда (1) с несколькими протезными элементами (7) и нерва (3); кроме того, представлено восстановительное пространство (5) нескольких планируемых имплантатов;
На фиг. 5 представлена среда цифрового планирования для дентальной имплантологии;
На фиг. 6 представлена панорамная кривая, визуализированная в осевом CT-сканированном изображении;
На фиг. 7 представлены несколько сечений челюсти и протез для сканирования;
На фиг. 8 представлен хирургический шаблон (SurgiGuide™), применяемый для переноса цифрового планирования на пациента;
На фиг. 9 представлено расположение единственного протезного элемента (7) относительно челюсти (2) пациента. Пространственные границы (4), ограничивающие возможные положения имплантата, определяются двумя координатными точечными сетками (8) на резцовой/окклюзонной и апикальной поверхностях протезного элемента (7);
На фиг. 10 представлено сечение протезного элемента (7) и челюсти (2) с апикально-резцовой осью (10), проходящей вдоль внутреннего смещения (9) элемента;
На фиг. 11 представлено расположение наименьшего ограничивающего блока (11) относительно нижней челюсти (2);
На фиг. 12 представлены поперечное сечение и вид в сечении протезного элемента.
Апикально-резцовая ось (10) пересекает элемент в двух точках (12), определяющих две плоскости (13), перпендикулярные оси. Контуры (14) элемента в данных плоскостях (13) смещены (15) и спроецированы на поверхность элемента с образованием 3-мерного контура координатной точечной сетки (8);
На фиг. 13 представлены поперечное сечение и вид в сечении протезного элемента. Крайние резцовые/окклюзионные точки (18) в нескольких радиально ориентированных плоскостях образуют контур (19), проходящий через острые выступы зуба, который может быть смещен внутрь для образования контура (20) координатной точечной сетки (8);
На фиг. 14 представлено сечение протезного элемента (7) и челюсти (2).
Потенциальные оси (21) имплантатов образованы путем соединения точек резцовой/окклюзионной координатной точечной сетки (22) с точками апикальной координатной точечной сетки (23). Упомянутые оси (21) пересекают челюсть (2) с образованием точек (24) входа и точек (25) выхода. Библиотека (26) имплантатов дает список возможных имплантатов (6);
На фиг. 15 представлен имплантат (6) с уникортикальной фиксацией, расположенный на расстоянии f от нерва (3), и с уступом (27) имплантата на расстоянии e от точки входа в челюсть (2);
На фиг. 16 представлен имплантат (6) с бикортикальной фиксацией;
На фиг. 17 представлена челюсть с фенестрацией (28) имплантатом;
На фиг. 18 представлена линия (29) улыбки, наложенная на осевые CT-сканированные изображения;
На фиг. 19 представлено сечение протезного элемента (7) и имплантата (6). Крайняя буккальная точка (30) на уступе имплантата расположена на линии (31), проходящей через крайнюю буккальную точку (32) координатной точечной сетки в заданном сечении и точку (33), находящуюся на g мм более апикально и на h мм более лингвально;
На фиг. 20a и 20b представлены биомеханические модели челюсти с имплантатами и верхней структурой и без них;
На фиг. 21 представлена размерно изменяемая зубная дуга;
На фиг. 22 представлено сечение контура (34) челюсти с соответствующей панорамной кривой (35);
На фиг. 23 представлено несколько 2-мерных характерных элементов (36) в форме корней зубов и зубов;
На фиг. 24 представлена челюсть, в которой опознано несколько характерных элементов и которая последовательно разделена на несколько сегментов (37), которые можно соотнести с положениями зубов;
На фиг. 25 представлен осевой CT-срез с рассеянием (38);
На фиг. 26 представлена 3-мерная модель челюсти (2) с отрезком или областью (39) поверхности в форме зуба;
На фиг. 27 представлен 3-мерный характерный элемент в форме зуба; и
На фиг. 28 представлена блок-схема последовательности операций способа в соответствии с вариантом осуществления настоящего изобретения;
На фиг. 29 представлена схема компьютерной системы в соответствии с вариантом осуществления настоящего изобретения;
На фиг. 30 представлена конфигурация системы обработки для подготовки информации для автоматического или полуавтоматического планирования внутричелюстного зубного имплантата по изобразительной информации, относящейся к челюсти пациента.
Подробное описание наглядных вариантов осуществления
Ниже настоящее изобретение описано на конкретных вариантах осуществления и со ссылками на некоторые чертежи, но изобретение ограничено не упомянутыми вариантами, а только формулой изобретения.
Поиск оптимальных положений имплантатов
В соответствии с предпочтительным вариантом осуществления изобретения требуется и создается трехмерное отображение искомого зубного ряда (1) и челюсти (2) и любых нервов (3) или кровеносных сосудов (смотри фиг. 4). Способы, предназначенные для подготовки информации для автоматического или полуавтоматического планирования внутричелюстного зубного имплантата по изобразительной информации, относящейся к челюсти пациента, и составляющие предмет настоящего изобретения, следует понимать как компьютерные способы подготовки информации для автоматического или полуавтоматического планирования внутричелюстного зубного имплантата по изобразительной информации, относящейся к челюсти пациента.
Схематическое общее представление способа в соответствии с настоящим изобретением представлено на фиг. 28. Этапы, показанные на упомянутой схеме последовательности операций, более подробно описаны ниже.
Способ начинает исполняться, когда в наличии имеются 3-мерные модели частей челюсти и/или 3-мерные модели зубного ряда, например объемные сканированные изображения челюсти пациента и трехмерное отображение искомого зубного ряда (1) и челюсти (2) и любых нервов (3) или кровеносных сосудов (смотри фиг. 4). На первом последовательном этапе (смотри фиг. 9) 3-мерную модель зубного ряда (1) используют для определения пространственных границ (4), которыми должны быть в идеале ограничены восстановительные области (5) имплантата, чтобы быть эстетически допустимыми. Восстановительная область (5) образована как объем в пространстве, который должен быть занят имплантатом (6) (смотри фиг. 14-16) при его воображаемом протяжении в направлении замещения дефектных зубов или зубных рядов. Пространственные границы (4) могут быть идентифицированы для каждого элемента (например, зуба) (7) в ряду (1). Они могут быть определены в виде функции от пространственно-координатных точечных сеток (8) на соответственно резцовых/окклюзионных и апикальных сторонах элементов 7 (спроецированных или нет на поверхности). Для задания сеток (8) можно применить несколько методов. Ниже перечислено несколько пояснительных методов.
- В одном случае можно применять смещение или операцию формирования полостей для создания 3-мерного объема (9) (смотри фиг. 10) внутри 3-мерной модели зуба (7). Упомянутый 3-мерный объем (9) характеризует металлический базис физического протеза, на который наносят фарфоровый слой для имитации эмали зубов. Наружные контуры координатных сеток на поверхности 3-мерной модели зуба получают проецированием на нее полученного объема. В предпочтительном варианте направление проецирования задается апикально-резцовой осью (10) протезного элемента (7). Ось можно найти, например, вычислением наименьшего ограничивающего блока (11) (смотри фиг. 11) для неподвижной фиксации протезного элемента и определением расстояния от протезного элемента до челюстной кости по каждой из трех главных осей ограничивающего блока. Ось, по которой получают кратчайшее расстояние, является апикально-резцовой осью элемента. В альтернативном варианте можно вычислять главные оси инерции протезного элемента. Апикально-резцовая ось будет осью, по которой расстояние от элемента до кости является кратчайшим.
- В другом случае для задания координатных сеток применяют две точки (12) пересечения апикально-резцовой оси элемента с его поверхностью (смотри фиг. 12). В упомянутых плоскостях (13) точек пересечения задают резцовую/окклюзионную и апикальную плоскости перпендикулярно апикально-резцовой оси. Элемент проецируют на упомянутые плоскости в направлении оси с получением в каждой плоскости замкнутой 2-мерной кривой (14) или спроецированного контура. Затем вычисляют суммарную площадь, замкнутую упомянутыми кривыми, и кривые смещают внутрь, пока замкнутая поверхность не достигает заданной процентной доли от исходного значения. Полученные таким образом 2-мерные кривые (15) или смещенные контуры проецируют обратно на элемент с получением контуров соответствующих координатных точечных сеток.
- Другой дополнительный способ задания координатных точечных сеток (8) заключается в модификации конструкции шаблона (16) для сканирования. В этом случае рентгенонепрозрачные зубы (17), применяемые для изготовления шаблона для сканирования, представляют собой трубки правильной или неправильной формы с ограниченной толщиной стенок. При вычислении 3-мерной модели зубного ряда по CT-изображениям пространственные границы (4) можно легко идентифицировать в 3-мерной модели в виде отверстий в разных элементах зубного ряда. Границы упомянутых отверстий на апикальной и резцовой/окклюзионной сторонах можно использовать как контуры для координатных точечных сеток. Поверхность с координатной сеткой задается отверстием, заполняющим упомянутый контур.
- Еще один способ задания контура координатной точечной сетки (8) на резцовой/окклюзионной стороне элементов заключается в вычислении точки (12) пересечения элемента с апикально-резцовой осью (10) (смотри фиг. 12) на резцовой/окклюзионной стороне элемента. Затем по всем направлениям, радиальным относительно апикально-резцовой оси, выполняют систематический поиск точек (18) (смотри фиг. 13), расположенных в крайних резцовых/окллюзионных положениях (d) относительно точки пересечения. Таким образом задают 3-мерную кривую на поверхности элементов, которая пересекает острые выступы зуба. Ввиду того, что упомянутые острые выступы должны оставаться без отверстий, то 3-мерную кривую (19) смещают внутрь на поверхности элемента. После этого смещенную кривую (20) можно использовать как контур для координатной точечной сетки (8).
Последний способ особенно полезен, когда имеют дело с молярами и премолярами.
На втором этапе координатные точечные сетки (8), которые идентифицированы на разных элементах (7) зубного ряда (1), используют для идентификации возможных осей (21) имплантата (смотри фиг. 14). Для каждого элемента (7) в зубном ряду (1), при желании, все точки резцовой/окклюзионной сетки (22) можно соединить со всеми точками апикальной сетки (23). Тем самым получают конечное число наборов осей (21) имплантата для каждого элемента. Все оси являются эстетически допустимыми. Для задания условий, связывающих размер координатных точечных сеток на апикальной стороне зуба с резцовой/окклюзионной стороной, можно воспользоваться правилами. Например, поверхность с координатной точечной сеткой на апикальной стороне может быть приблизительно на 1,5 мм меньше по всему периметру в сравнении с резцовой/окллюзионной стороной. Благодаря этому в наличии имеется достаточно пространства для металла и фарфора, когда зубной техник осуществляет восстановления. Апикальная координатная точечная сетка для моляра, вероятно, будет овальной по форме, тогда как для резца сетка может быть уменьшена до не более, чем единственной центральной точки.
На третьем этапе вычисляются пересечения каждой оси с 3-мерной костной моделью. Тем самым находят точки входа (24) и выхода (25) на кости (смотри фиг. 14). Затем имплантаты (6), доступные, например, из библиотеки (26) имплантатов, помещают соответственно согласно каждому из направлений осей, при этом центральная линия имплантата проходит через соответствующие точки входа. Например, уступы (27) имплантатов располагают на заданном расстоянии (e) от точек (24) входа (смотри фиг. 15). Упомянутое расстояние может изменяться в зависимости от конструкции имплантата. Для каждого из имплантатов в каждом положении выполняют проверки для балльной оценки решения. Присвоение балльной оценки решению означает обеспечение, по меньшей мере, одного критерия согласия и, по меньшей мере, одного численного значения согласия для упомянутого/упомянутых критерия/критериев.
В одном варианте осуществления настоящего изобретения суммарную балльную оценку предлагаемого решения можно рассматривать как взвешенное среднее значение отдельных балльных оценок для некоторой или для каждой проверки. Упомянутые проверки могут охватывать:
- Расстояние (f) модели имплантата от 3-мерной модели нерва или кровеносного сосуда (смотри фиг. 15);
- Степень, с которой имплантат центрирован относительно кости (смотри фиг. 17). В данном случае, например, проверяют, имеет ли место фенестрация (28), т.е. образование отверстий в кости в другом месте, кроме точки входа;
- Качество кости вокруг имплантата, выражаемое, например, средними полутоновыми значениями элементов трехмерного изображения, занимаемых имплантатом (6) и в непосредственной близости от него в объемном изображении, например CT-изображении;
- Степень, с которой ось имплантата центрирована в контуре резцовой/окклюзионной координатной точечной сетки, при этом длинная ось имплантата должна предпочтительно выходить в центре окклюзионной поверхности зубов;
- Наличие уни- или бикортикальной (смотри фиг. 16) фиксации, например, для окружения имплантата максимальным объемом кости;
- Положение уступа имплантата относительно поверхности кости (теоретически, от 1,5 до 2 мм над уровнем кости);
- Направление имплантата по отношению к направлению окклюзионных сил. Что касается распределения напряжений, то окклюзионные силы лучше всего предполагать направленными по оси имплантата, а не под углом к нему;
- Тип чистоты поверхности имплантата (шероховатая/полированная);
- Тип присоединения имплантата (внутреннее или внешнее; шестигранник или восьмигранник и т.п.).
Следует понимать, что балльная оценка может изменяться в зависимости от типа восстановления, которому отдано предпочтение пациентом или лечащим врачом. Два основных варианта выбора представляют собой протез с резьбовой фиксацией и зацементированный протез. Протезы с резьбовой фиксацией крепятся непосредственно на имплантаты с помощью небольших винтов. Поэтому имплантаты должны выходить, по мере возможности, в центрах резцовых/окклюзионных поверхностей восстановительных элементов и никогда на буккальной (т.е. видимой) стороне зубов.
Зацементированные протезы не ставят непосредственно на имплантаты. Вместо этого в имплантат вкручивают промежуточный компонент, известный как абатмент, и протез цементируют на абатментах. Абатменты можно применять для изменения исходного или планируемого направления абатмента относительно имплантата на угол до 45°. Таким образом, имплантаты можно планировать, например, только с учетом биомеханических соображений, например величиной и качеством кости. Во время восстановления направление выхода имплантата следует корректировать применительно к эстетическим требованиям.
Некоторые из проверок могут быть специфическими для конкретного типа элемента или заданными в зависимости от него (различными для переднего зуба и бокового зуба; резца и клыка и т.п.). В таких случаях важно знать тип элемента, для которого выполняют проверку. Типичным примером является различие между элементом, который будет заметным, когда пациент улыбается, и элементом, который будет незаметным.
В соответствии с аспектом настоящего изобретения в состав среды планирования включен способ для обозначения линии (29) улыбки пациента (смотри фиг. 18), который можно использовать для определения оптимальной постановки имплантата. Наглядный способ обозначения линии (29) улыбки заключается в наложении скобы на осевые объемные изображения, например CT-изображения, которая является перемещаемой врачом для обозначения видимой области. Другим примером является инструментальное средство, предоставляющее врачу возможность рассекать 3-мерную модель зубного ряда для ее разделения на видимую и невидимую части.
Наглядный пример проверки, которая зависит от типа зуба, относится к оценке достижимого выступающего профиля (т.е. описывает характер выхода зуба из десен) в зависимости от положения имплантата. Критерий, применяемый для выполнения проверки, основан на виде в сечении оцениваемых восстановительного элемента (зуба) (7) и имплантата (6) (смотри фиг. 19). При этом устанавливается, что имплантаты имеют идеальный выступающий профиль, когда крайняя буккальная точка (30) уступа имплантата находится на оси (31), проходящей через буккальную точку (32) пересечения контура координатной точечной сетки с плоскостью сечения, а вторая точка (33) находится на заданных апикальном (g) и лингвальном (h) расстояниях от упомянутой точки пересечения. Последние упомянутые расстояния различаются для моляров, премоляров, резцов и клыков.
Четвертый этап заключается в оценке конфигурации имплантатов (т.е. положений и наклонов имплантатов одного относительно другого). Можно установить предел на количество разных марок, длин и/или диаметров имплантатов, применяемых для установки одному пациенту. Расстояния между имплантатами вычисляются автоматически и сравниваются с заданным минимальным расстоянием, которое может отличаться для разных систем имплантатов. Кроме того, биомеханическую (например, аналитическую) модель (фиг. 20a и фиг. 20b) можно применить для предварительного вычисления нагрузок на имплантаты в результате жевания (например, применяют несколько сценариев, таких как откусывание яблока, жевание резинки и т.п.). Модель может учитывать деформацию челюсти (1) под нагрузкой и/или тип и конструкцию протеза, который будет прикреплен к имплантатам (например, такое значение жесткости, как модуль E материала, который будет применен, и/или момент инерции в каждой секции или комбинации двух секций) и т.п. Предварительно вычисленные нагрузки используют для определения числа необходимых имплантатов и способа, в соответствии с которым имплантаты должны быть распределены по потенциальным местам имплантации. В соответствии с дополнительным аспектом, начиная с конфигурации имплантатов, состоящей из всех имплантатов с наибольшими индивидуальными балльными оценками, конфигурацию можно систематически модифицировать заменой одного из имплантатов его следующим наилучшим (например, с учетом индивидуальных балльных оценок) заменителем, пока не будут удовлетворены все критерии конфигурации.
В соответствии с другим вариантом осуществления изобретения в объемных сканированных изображениях, например CT-сканированных изображениях, отсутствует трехмерное отображение зубного ряда. Вместо этого для представления восстановительных элементов используют библиотеку образов размерно изменяемых зубов или зубной дуги (фиг. 21). Зубы или зубную дугу из библиотеки можно накладывать на объемные, например CT-сканированные, изображения для позиционирования их/ее относительно челюстной кости. Зубы или зубную дугу из библиотеки можно также наблюдать в виде 3-мерного образа в соотношении с 3-мерными образами челюсти (2), нервов (3) и кровеносных сосудов. Кроме того, зубы или зубные дуги можно автоматически размерно изменять в зависимости от доступного пространства вдоль челюсти. Например, ширину каждого зуба из библиотеки на заданной дуге можно модифицировать таким образом, чтобы сумма значений ширины всех зубов согласовалась с длиной челюсти, измеренной в проекции.
В случае с частичным отсутствием зубов зубы или зубную дугу, доступные из библиотеки, можно совмещать с 3-мерными образами соответствующих оставшихся зубов пациента. Тем самым можно получать оптимальную подгонку. Зазоры между оставшимися зубами заполняют предлагаемыми восстановительными элементами из библиотеки зубов. Упомянутые зубы из библиотеки используют в дальнейшем для осуществления планирования установки, например их можно вводить автоматически. Описанный подход дает преимущество в том, что пространственные границы для восстановительных пространств имплантатов или даже возможные оси имплантатов можно предварительно задавать в виде составной части библиотеки. Тем самым можно значительно ускорить процесс, при желании автоматизированный, определения походящего плана имплантата.
В альтернативном варианте протез или диагностическую восковую зуботехническую модель можно сканировать оптически и совмещать с изображениями или 3-мерным изображением челюсти и тем самым обеспечивать необходимую информацию об искомом зубном ряде.
Поиск допустимых положений имплататов
В соответствии с еще одним вариантом осуществления изобретения используют только трехмерный образ челюсти (2) и любых нервов (3) или кровеносных сосудов. Среда планирования включает в себя, например, экспертную систему, которая содержит ряд жестких или гибких правил для размещения имплантата на основе анализа базы данных образцов случаев планирования имплантатов в связи со знаниями экспертов об установке имплантатов. Некоторые из правил представляют собой правила отождествления, используемые для различения между типами характерных случаев (например, единственный имплантат между двумя соседними зубами, восстановление полной дуги, два моляра, отсутствующие в боковой области), некоторые правила представляют собой правила размещения имплантатов, используемые для рекомендации типов и конфигураций имплантатов, характерных для лечения случаев некоторого типа (например, для единственного имплантата между двумя соседними зубами положение имплантата обычно соответствует средней точке между зубами). В начале планирования экспертная система будет использовать 3-мерный образ челюсти для идентификации типа случая и рекомендовать предварительную конфигурацию имплантата, соответствующую решению «наилучшей подгонки» в экспертной системе.
На следующем этапе предварительную конфигурацию оценивают в связи с ограничениями, накладываемыми конкретным случаем (например, величиной и качеством доступной кости в рекомендуемых местах под имплантаты, расстоянием до нервов или кровеносных сосудов, наличием фенестраций кости и т.п.). Требуется, чтобы каждый индивидуальный имплантат соответствовал ряду предварительных условий (например, по удалению от ближайшего нерва на, по меньшей мере, 2 мм, максимальному наклону относительно краниокаудальной оси пациента и т.п.).
В ограниченном исполнении варианта осуществления система обеспечивает только обратную связь с пользователем по приемлемости рекомендуемого планирования. Обратная связь может, например, быть тестовой и тогда сообщение указывает пользователю имплантаты, которые следует пересмотреть. В альтернативном варианте можно применять цветной код для указания либо одобренных имплантатов (зеленый цвет), либо отвергнутых имплантатов (красный цвет). В соответствии с таким вариантом осуществления взаимодействие с пользователем необходимо для точной коррекции плана установки.
В более современных исполнениях вариантов осуществления система шаг за шагом корректирует положения, ориентации, длину и диаметры индивидуальных имплантатов, пока не будут выполнены индивидуальные предварительные условия. Вышеизложенное составляет общую проблему оптимизации, например выявление оптимальных значений нескольких параметров, которую можно решить, в частности, с использованием функции стоимости, например дискретной функции стоимости. Каждый индивидуальный параметр, например положение, длину, угол, расстояние, ориентацию и т.п., ассоциируют со значением балльной оценки. Когда параметр модифицируют, например угол имплантата изменяют на 1°, балльная оценка параметра исправляется. Значение балльной оценки можно определять по вкладу конкретного параметра в благоприятный результат изменения, насколько оно касается имплантата. Взвешенное среднее значение для разных балльных оценок можно использовать для оценки пригодности предлагаемого плана имплантата.
Настоящее изобретение включает в себя способ автоматического поиска наличия и положений зубов в данных объемного изображения пациента. В наглядном варианте осуществления способа для такого автоматизированного поиска в качестве входных данных применяется 3-мерная модель челюсти (2), помимо самих объемных данных. Во-первых, 3-мерная модель разделяется цифровым методом для получения нескольких 2-мерных изображений срезов, т.е. набора контуров (34) с заданным расстоянием между срезами (смотри фиг. 22). После этого автоматически формируется панорамная кривая (35) для каждого из контуров. Такие панорамные кривые можно вычислять, например, как средние линии контуров. После формирования панорамных кривых выполняется проверка в каждом срезе объемных данных, например CT-срезе, для оценки того, присутствует или нет «характерный элемент» (36) вдоль панорамной кривой (смотри фиг. 23). Если CT-срезы не соответствуют разделению 3-мерной модели, то можно воспользоваться интерполированными изображениями. Характерные элементы (36) являются 2-мерными матрицами, отражающими возможными формами сечения зуба или зубного корня. Характерный элемент (36) опознается, например, когда заданное корреляционное значение становится больше некоторого значения. В альтернативном варианте характерный элемент может быть опознан, когда поэлементное произведение характерного элемента и полутоновых значений в CT-срезе превосходит некоторое значение.
Когда характерный элемент опознан, можно присвоить номер зуба, например, на основе среднего значения ширины зубов (смотри фиг. 24a и 24b). Зоны на челюстной кости (37) относят к зубам, которые обычно должны занимать их. Данные зоны идентифицируют суммированием средних значений ширины зубов, начиная с середины панорамной кривой. Поправки можно вводить на основе известной длины дуги челюсти или уже идентифицированных зубов.
Результатом вышеописанных операций является автоматизированная идентификация зуба в каждом из срезов объемных данных, например в CT-срезах. При использовании информации, собранной во всех срезах, присутствие зуба либо подтверждается, либо нет путем проверки, был ли зуб идентифицирован в нескольких CT-срезах.
Каждый срез объемных данных, например CT-срез, проверяется также в отношении наличия рассеяния (38) (смотри фиг. 25). Типичная проверка - включать в себя просмотр значений Хаунсфилда в CT-срезе и вычисление Фурье-спектра полутоновых значений по заданной кривой (например, 2-мерное смещение панорамной кривой). Черно-белая картина, обычно связанная с рассеянием, приводит к, по меньшей мере, одному частотному максимуму в спектре. В альтернативном варианте проверка может выполняться для определения, существуют ли области (заданного размера) в CT-срезе со средним значением в единицах Хаунсфилда, превышающим некоторый порог. При принятии решения относительно того, присутствует ли зуб или нет, срезы, содержащие рассеяние, можно интерпретировать специальным образом (например, посредством применения весовых коэффициентов достоверности).
Настоящее изобретение включает в себя также способ автоматической идентификации отдельных зубов в 3-мерной модели протеза (16) для сканирования или 3-мерной модели челюсти (2). В наглядном варианте осуществления настоящего способа сложная 3-мерная модель челюсти (2) или протеза (16) для сканирования последовательно разбивается и подразделяется на менее сложные и легче идентифицируемые области или отрезки (39) (смотри фиг. 26, 27). Это выполнимо, например, с использованием граничного алгоритма на основе вычислений кривизны (Mohandas S., Henderson M., Pursuing mechanical part feature recognition through the isolation of 3D features in organic shapes. IMECE2002-DE-34419. ASME 2002 - International Mechanical Engineering Conference and Expo Nov 17th-22nd. New Orleans, Louisiana). Затем отрезки сравнивают с набором заданных 3-мерных характерных элементов, характеризующих зубы (40). Характерные элементы можно опознавать, например, когда заданное корреляционное значение становится больше, чем некоторое значение.
Признаком настоящего изобретения является то, что части описанных способов можно использовать раздельно: способ автоматической нумерации зон челюсти, способ опознавания зубов в зубном ряду и т.п.
На фиг. 29 схематически представлена компьютерная система, которую можно применять в способах и в системе в соответствии с настоящим изобретением, например в способе, показанном на фиг. 28. Изображенный компьютер 50 может содержать видеотерминал 54, средство для ввода данных, например клавиатуру 56, и координатно-указательное средство графического пользовательского интерфейса, например мышь 58. Компьютер 50 может быть выполнен в виде универсального компьютера, например рабочей станции UNIX, или персонального компьютера.
Компьютер 50 содержит центральный процессор («CPU») 55, например обычный микропроцессор, одним примером которого является процессор Pentium IV компании Intel Corp., США, и ряд других блоков, соединенных между собой по шинной системе 62. Шинная система 62 может быть любой подходящей системой, и фиг. 29 является только схемой. Компьютер 50 содержит, по меньшей мере, одну память. Память может содержать любое из множества разнообразных устройств накопления данных, известных специалистам, например оперативную память («RAM»), постоянную память («ROM»), энергонезависимую память с записью и считыванием, например жесткий диск, известный специалистам. Например, компьютер 50 может дополнительно содержать оперативную память («RAM») 64, постоянную память («ROM») 66, а также дисплейный адаптер 67 для подсоединения системной шины 62 к видеотерминалу 54 и адаптер 69 ввода/вывода (I/O) для подключения периферийных устройств (например, накопителей 63 на дисках и магнитных лентах) к системной шине 62. Видеотерминал 54 может быть визуальным устройством вывода компьютера 50, которое может представлять собой любое подходящее устройство отображения, например видеодисплей на ЭЛТ (электроннолучевой трубке), широко известный в компьютерной технике. Однако в случае настольного компьютера, портативного компьютера или компьютера типа ноутбук видеотерминал 54 можно заменять жидкокристаллическим (LCD) или газо-плазменным дисплеем с плоским экраном. Компьютер 50 дополнительно содержит адаптер 59 пользовательского интерфейса для подключения клавиатуры 56, мыши 58, дополнительного акустического устройства 65, а также позволяющий дополнительно вводить физические значения из устройств сбора физических значений, например медицинской визуализирующей аппаратуры 70 внешней системы 60. Систему 60 можно подключать к шине 62, сети передачи данных, например сети Internet, Intranet, локальной или глобальной сети (LAN или WAN) или сети CAN. Медицинская визуализирующая аппаратура 70 может быть любой подходящей аппаратурой для сбора объемных 3-мерных данных об анатомии пациента, например CT (компьютерным томографом) или MRI (магниторезонансным томографом). Упомянутая медицинская визуализирующая аппаратура может содержать любое устройство для сбора соответствующих объемных данных изображения пациента. Устройство 70 сбора данных системы 60 обеспечивает возможность передачи данных, относящихся к физической информации о пациенте, по телекоммуникационной сети, например ввода объемного описания анатомии пациента в удаленном месте и передачи упомянутого описания в более близкое место, например, по сети Internet, где процессор исполняет способ в соответствии с настоящим изобретением.
Объем настоящего изобретения включает в себя также ввод соответствующих объемных данных непосредственно в компьютер с помощью клавиатуры 56 или из запоминающих устройств типа устройств, обозначенных позицией 63, например, с такого подходящего информационного носителя, как дискета, сменный жесткий диск, оптическое запоминающее устройство, например диск CD-ROM или DVD-ROM, магнитная лента или что-то подобное.
Компьютер 50 содержит также графический пользовательский интерфейс, который содержится на машиночитаемом информационном носителе, для управления работой компьютера 50. Графический пользовательский интерфейс может содержаться на любом подходящем машиночитаемом информационном носителе, например в оперативной памяти (RAM) 64, постоянной памяти (ROM) 66, на магнитной дискете, магнитной ленте или оптическом диске (последние три устройства находятся в накопителях 63 на дисках или магнитных лентах). Работой CPU 55 могут управлять любая подходящая операционная система и соответствующий графический пользовательский интерфейс (например, Microsoft Windows, Linux). Кроме того, компьютер 50 содержит управляющую программу 61, которая хранится в компьютерном запоминающем устройстве 68. Управляющая программа 61 содержит команды, которые, при их исполнении в CPU 15, позволяют компьютеру 10 выполнять операции, описанные в связи с любым из способов в соответствии с настоящим изобретением.
Специалистам в данной области техники должно быть понятно, что аппаратные средства, представленные на фиг. 29, могут изменяться в конкретных случаях применения. Например, другие периферийные устройства, например оптические дисковые носители, звуковые адаптеры или устройства программирования интегральных схем, например устройства программирования PAL (программируемой матричной логики) или EPROM (стираемого программируемого постоянного запоминающего устройства), широко известные в компьютерной технике, и т.п., можно применять в дополнение к уже описанным аппаратным средствам или вместо них.
В примере, описанном на фиг. 29, компьютерный программный продукт для исполнения способа в соответствии с настоящим изобретением может содержаться в любой подходящей памяти. Однако важно, чтобы, хотя настоящее изобретение создано и будет продолжать существовать в вышеописанной форме, специалисты в данной области техники понимали, что механизмы в соответствии с настоящим изобретением допускают распространение в виде компьютерного программного продукта в различных формах и что настоящее изобретение в равной степени применимо независимо от конкретного типа сигнальной среды, применяемой для фактического осуществления распространения. Примеры компьютерно читаемой сигнальной среды включают в себя: среды записывающего типа, например ROM на гибких дисках и CD-ROM, и передающие среды, например цифровые и аналоговые линии связи.
Соответственно, настоящее изобретение охватывает также программный продукт, который, при исполнении на подходящем компьютерном устройстве, выполняет любой из способов в соответствии с настоящим изобретением. В частности, код содержит что-либо из нижеследующего: (a) средство для формирования 3-мерных моделей зубного ряда, (b) и/или средство для формирования 3-мерных моделей частей челюсти, (c) средство для поиска зон в челюсти, в которых можно (или, при желании, нельзя) ставить имплантаты, (d) средство для поиска восстановительных элементов в зубном ряду, (e) средство для определения подходящих размеров, положений, ориентаций и конфигураций имплантатов, (f) средство для получения планов имплантатов, (g) средство для сравнения планов имплантатов между собой или с заданными критериями, (h) средство для выбора или совершенствования плана имплантата. Дополнительный код обеспечивается для выполнения любого из способов или средств, предлагаемых настоящим изобретением, например, описанных в прилагаемой формуле изобретения.
Настоящее изобретение включает в себя также компьютерный продукт в описанной выше форме, содержащийся на машиночитаемом(ых) информационном(ых) носителе или носителях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ комбинированного расширения верхней челюсти у взрослых пациентов с сужением верхней челюсти вследствие расщелины губы и неба | 2024 |
|
RU2835468C1 |
| Способ ортодонтического лечения адентии зубов | 2020 |
|
RU2761715C1 |
| СИСТЕМА И СПОСОБ ПЛАНИРОВАНИЯ СТОМАТОЛОГИЧЕСКОГО ЛЕЧЕНИЯ | 2018 |
|
RU2679557C1 |
| Способ использования динамического виртуального артикулятора для имитационного моделирования окклюзии при выполнении проектирования стоматологических протезов для пациента и носитель информации | 2017 |
|
RU2652014C1 |
| Способ компьютерного моделирования восстановления биомеханических показателей зуба для равномерного распределения жевательной нагрузки на опорные ткани зуба и костную ткань | 2019 |
|
RU2693993C1 |
| Способ построения 3D-модели конструктивного прикуса в полном цифровом протоколе | 2023 |
|
RU2826423C1 |
| Способ определения отклонений установленного дентального имплантата от планируемого положения | 2024 |
|
RU2832827C1 |
| СПОСОБ НАВИГАЦИОННОЙ ТРЕПАН-БИОПСИИ ЧЕЛЮСТНЫХ КОСТЕЙ | 2021 |
|
RU2784593C2 |
| СПОСОБ ПРОВЕДЕНИЯ СПЛИНТ-ТЕРАПИИ У ПАЦИЕНТОВ С КОНЦЕВЫМИ ДЕФЕКТАМИ ЗУБНЫХ РЯДОВ, В ТОМ ЧИСЛЕ С ОГРАНИЧЕННЫМ ОТКРЫВАНИЕМ РТА | 2024 |
|
RU2833134C1 |
| Направляющий шаблон для мягкотканной трансплантации | 2021 |
|
RU2760296C1 |



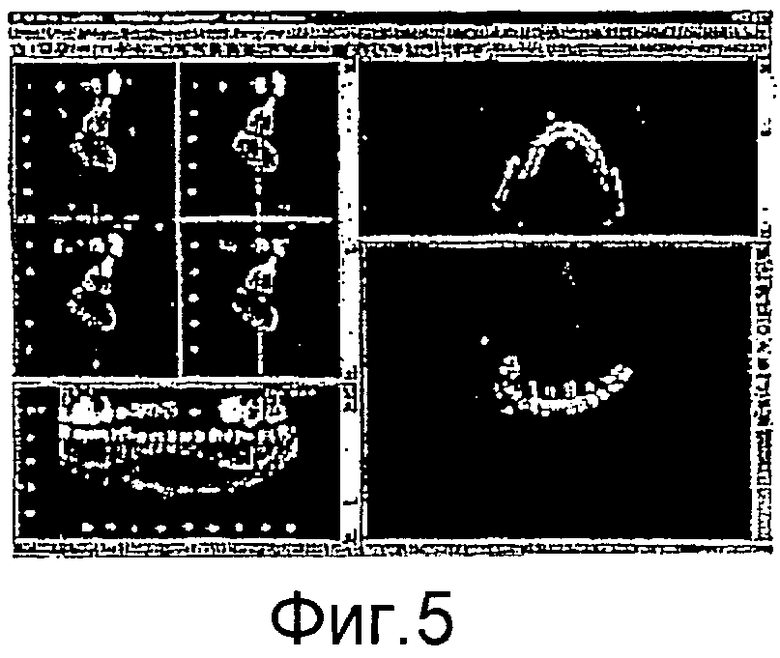

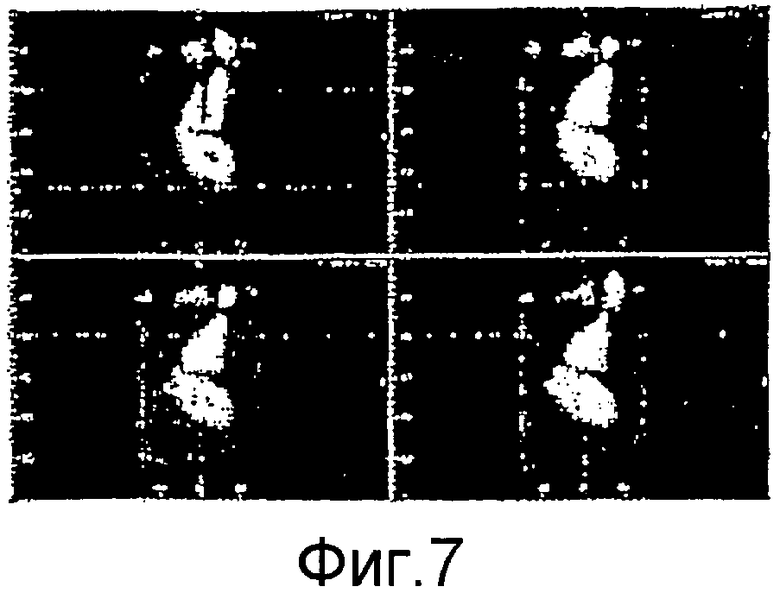


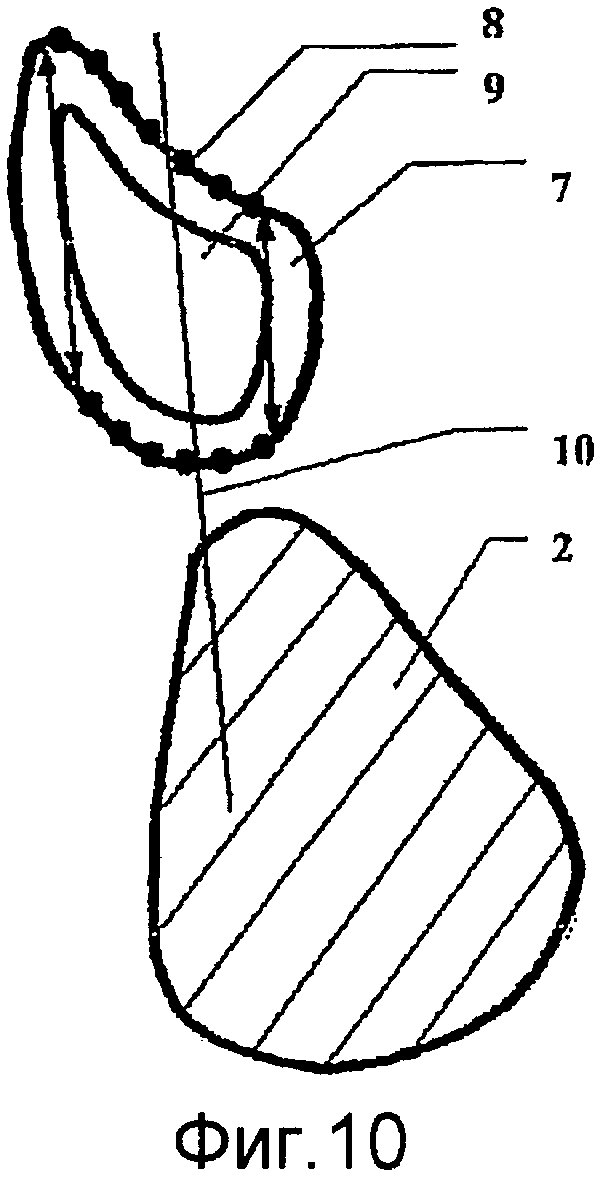


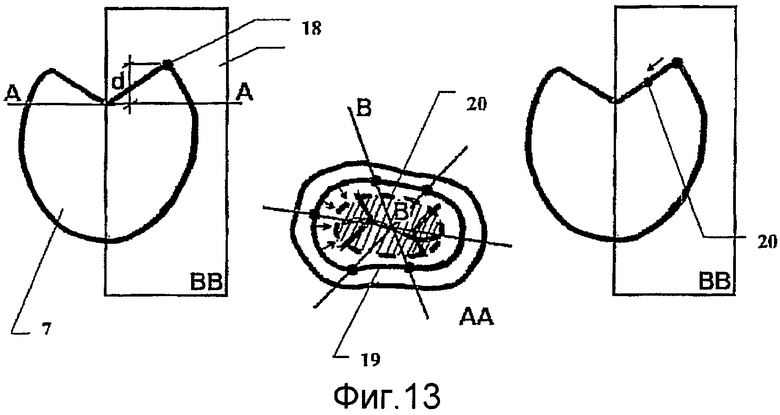


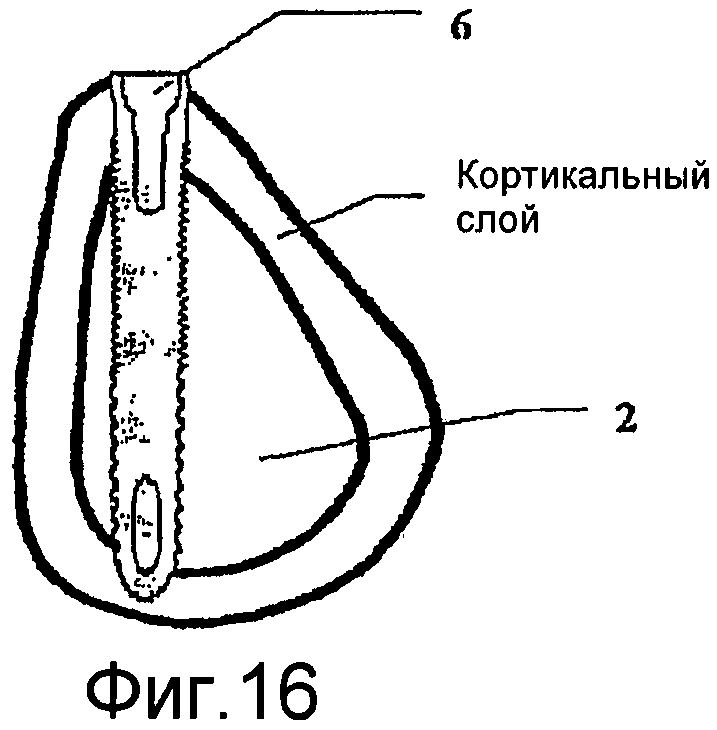



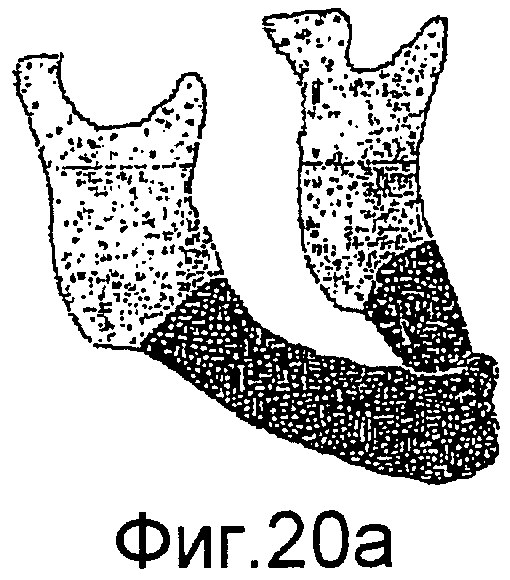

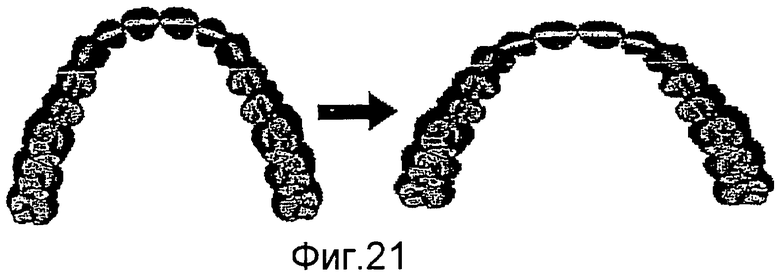

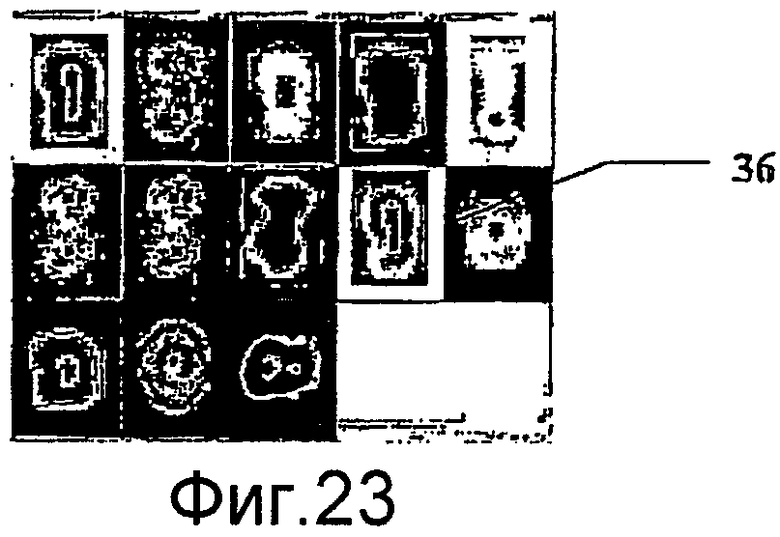
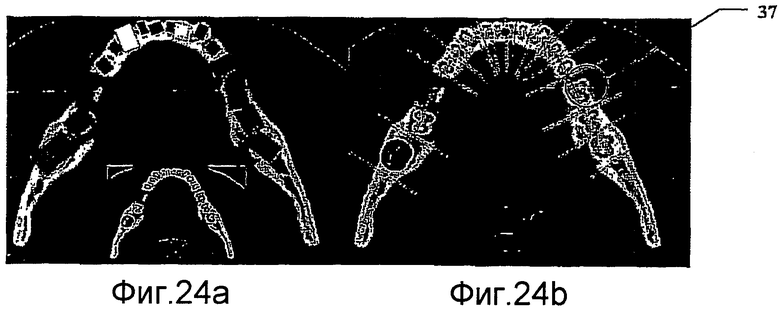

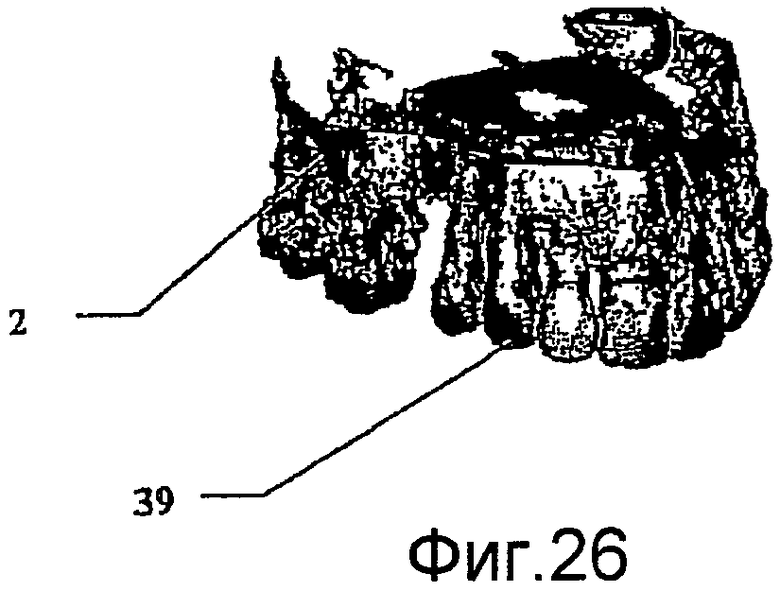


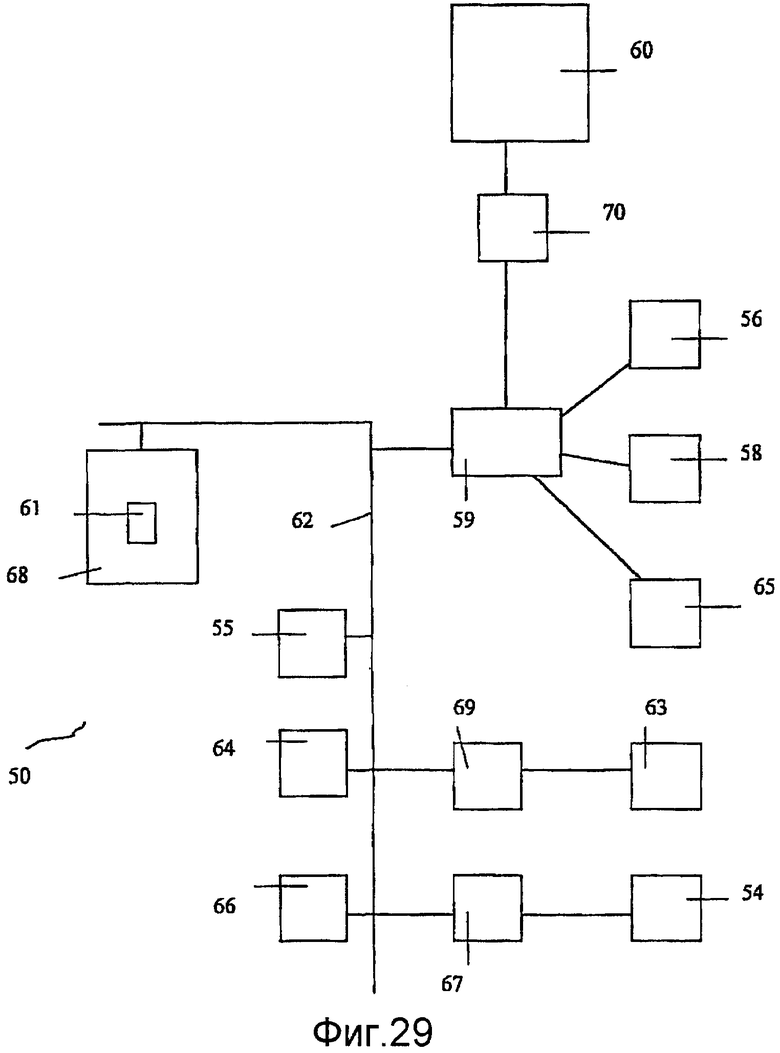

Группа изобретений относится к области медицины. Система содержит средство для формирования 3-мерных моделей зубного ряда и/или средство для формирования 3-мерных моделей частей челюсти, средство для поиска зон в челюсти, в которых можно или нельзя установить имплантаты, средство для поиска восстановительных элементов в зубном ряду, средство для определения подходящих размеров, положений, ориентаций и конфигураций имплантатов, средство для получения планов имплантатов, средство для сравнения планов имплантатов между собой или с заданными критериями, средство для выбора или совершенствования плана имплантата. Система предназначена для осуществления способа, а машиночитаемый информационный носитель хранит компьютерный программный продукт, выполненный с возможностью исполнения способа. Данная группа изобретений усовершенствует планирование внутричелюстных зубных имплантатов с учетом биомеханических, функциональных или эстетических соображений с использованием объемных данных. 6 н. и 17 з.п.ф-лы, 30 ил.
1. Способ подготовки информации для автоматизированного планирования внутричелюстного зубного имплантата по изобразительной информации, относящейся к челюсти пациента, содержащий следующие этапы: (а) формируют 3-мерные модели зубного ряда, и (b) автоматически находят основные восстановительные элементы в 3-мерной модели зубного ряда на основе анализа изображений, при этом этап формирования 3-мерных моделей зубного ряда дополнительно содержит этап, заключающийся в том, что оцифровывают искомый зубной ряд, позиционированный надлежащим образом относительно челюсти посредством совмещения.
2. Способ по п.1, в котором автоматически находят основные восстановительные элементы в зубном ряду на основе полутоновых значений в 3-мерной модели зубного ряда.
3. Способ подготовки информации для автоматизированного планирования внутричелюстного зубного имплантата по изобразительной информации, относящейся к челюсти пациента, содержащий следующие этапы: (а) формируют 3-мерные модели частей челюстной кости, и (b1) находят анатомические и искусственные элементы в 3-мерной модели челюстной кости на основе анализа изображений, и (b2) автоматически выбирают зоны в 3-мерной модели челюстной кости, в которых возможно или невозможно установить имплантаты, при этом этап формирования 3-мерных моделей частей челюсти содержит следующие этапы: разделяют 3-мерную модель челюсти на несколько 2-мерных изображений срезов, формируют панорамную кривую для каждого из 2-мерных изображений срезов, оценивают в каждом изображении среза, присутствует ли, по меньшей мере, один 2-мерный характерный элемент вдоль панорамной кривой, и объединяют информацию о нескольких срезах для подтверждения присутствия зуба.
4. Способ по п.3, в котором поиск основан на полутоновом значении в 3-мерной модели частей челюсти.
5. Способ по любому из пп.1-4, дополнительно содержащий следующие этапы: (с) определяют подходящие размеры, положения, ориентации и конфигурации потенциального имплантата, (d) получают планы имплантата, (е) сравнивают планы имплантата между собой или с заданными критериями, (f) выбирают или совершенствуют план имплантата.
6. Способ по п.1, дополнительно содержащий следующие этапы: формируют 3-мерные модели частей челюсти, находят анатомические и искусственные элементы в челюстной кости на основе полутоновых значений в 3-мерной модели частей челюсти и автоматически выбирают зоны в челюсти, в которых возможно или невозможно установить имплантаты, определяют подходящие размеры, положения, ориентации и конфигурации потенциального имплантата, получают планы имплантата, сравнивают планы имплантата между собой или с заданными критериями и выбирают или совершенствуют план имплантата.
7. Способ по пп.1, 2 или 6, в котором этап формирования 3-мерных моделей зубного ряда дополнительно заключается в том, что позиционируют и масштабно преобразуют зубы или зубные дуги из цифровой библиотеки относительно челюсти пациента в объемных изображениях или 3 измерениях.
8. Способ по п.3, 4 или 6, в котором этап формирования 3-мерных моделей частей челюсти характеризуется тем, что обнаруживают объекты изображения, соответствующие собственным или искусственным зубам в челюсти.
9. Способ по п.3 или 4, в котором на этапе формирования панорамной кривой панорамную кривую вычисляют как среднюю линию контура в срезе челюсти.
10. Способ по п.3 или 4, в котором этап оценки заключается в том, что вычисляют значение корреляции между 2-мерными матрицами или характерными элементами, представляющими возможные формы сечений зуба или корня зуба, и полутонами в локальных областях 2-мерных изображений срезов вдоль панорамной кривой.
11. Способ по п.3 или 4, в котором этап формирования 3-мерных моделей частей челюсти дополнительно включает идентификацию зон челюсти, соответствующих положениям отдельных зубов, и приписывание им соответствующих номеров зубов на основе значений средней ширины зубов и известных размеров челюсти.
12. Способ по п.1 или 2, в котором этап нахождения восстановительных элементов в зубном ряду заключается в том, что вычисляют локальные значения кривизны поверхностей 3-мерной модели зубного ряда и подразделяют зубной ряд на менее сложные области или отрезки с использованием граничного алгоритма на основе полученных значений кривизны.
13. Способ по п.1 или 2, в котором этап нахождения восстановительных элементов в зубном ряду заключается в том, что вычисляют значения корреляции между 3-мерными матрицами или характерными элементами, представляющими возможные формы зубов, и локальными областями поверхности на 3-мерной модели зубного ряда и отделяют те области поверхности, на которых корреляционное значение превышает заданный порог.
14. Способ по любому из пп.1-4, дополнительно содержащий следующие этапы: (с) определяют подходящие размеры, положения, ориентации и конфигурации потенциального имплантата, (d) получают планы имплантата, (е) сравнивают планы имплантата между собой или с заданными критериями, (f) выбирают или совершенствуют план имплантата, при этом этап определения подходящих размеров, положений, ориентации и конфигураций потенциального имплантата заключается в том, что: задают координатные точечные сетки на, соответственно, резцовых/окклюзионных и апикальных сторонах восстановительных элементов, соединяют, для каждого элемента, все точки резцовой/окклюзионной координатной сетки со всеми точками апикальной координатной сетки, определяют точки пересечения полученных осей с 3-мерной моделью кости, помещают имплантаты из цифровой библиотеки имплантатов вдоль соответствующих осей так, что уступы имплантатов находятся на заданном расстоянии от точек входа осей в кость, составляют список всех возможных комбинаций от, минимум, одного набора альтернатив для одного имплантата для всего зубного ряда до, максимум, всех альтернатив для имплантата для каждого восстановительного элемента в зубном ряду.
15. Способ по любому из пп.1-4, дополнительно содержащий следующие этапы: (с) определяют подходящие размеры, положения, ориентации и конфигурации потенциального имплантата, (d) получают планы имплантата, (е) сравнивают планы имплантата между собой или с заданными критериями, (f) выбирают или совершенствуют план имплантата, при этом на этапе определения подходящих размеров, положений, ориентации и конфигураций потенциального имплантата применяют экспертную систему для идентификации типа случая установки имплантата и для рекомендации типичного соответствующего плана имплантата на основе решений «наилучшей подгонки» в экспертной системе.
16. Способ по любому из пп.1-4, дополнительно содержащий следующие этапы: (с) определяют подходящие размеры, положения, ориентации и конфигурации потенциального имплантата, (d) получают планы имплантата, (е) сравнивают планы имплантата между собой или с заданными критериями, (f) выбирают или совершенствуют план имплантата, при этом этап получения планов имплантатов заключается в том, что присваивают балльные показатели комбинации(ям) имплантатов в зависимости от результатов измерений, выполненных по объемным изображениям пациента или 3-мерным моделям, созданным на этапе формирования 3-мерных моделей зубного ряда или частей челюсти.
17. Способ по любому из пп.1-4, дополнительно содержащий следующие этапы: (с) определяют подходящие размеры, положения, ориентации и конфигурации потенциального имплантата, (d) получают планы имплантата, (е) сравнивают планы имплантата между собой или с заданными критериями, (f) выбирают или совершенствуют план имплантата, при этом этап получения планов имплантатов заключается в том, что присваивают балльные показатели комбинации(ям) имплантатов в зависимости от предварительно вычисленных нагрузок на имплантаты с использованием биомеханической или конечно-элементной модели челюсти, имплантатов и протеза.
18. Способ по любому из пп.1-4, дополнительно содержащий следующие этапы: (с) определяют подходящие размеры, положения, ориентации и конфигурации потенциального имплантата, (d) получают планы имплантата, (е) сравнивают планы имплантата между собой или с заданными критериями, (f) выбирают или совершенствуют план имплантата, при этом этап получения планов имплантатов заключается в том, что присваивают балльные показатели комбинации(ям) имплантатов в зависимости от достижимых выступающих профилей для отдельных имплантатов.
19. Способ по любому из пп.1-4, дополнительно содержащий следующие этапы: (с) определяют подходящие размеры, положения, ориентации и конфигурации потенциального имплантата, (d) получают планы имплантата, (е) сравнивают планы имплантата между собой или с заданными критериями, (f) выбирают или совершенствуют план имплантата, при этом этап сравнения планов имплантатов между собой или с заданными критериями дополнительно заключается в том, что постепенно регулируют размеры, положения и ориентации отдельных имплантатов в соответствии с заданной стратегией, пока балльный показатель плана не достигает заданного порогового значения.
20. Система для подготовки информации для автоматизированного планирования внутричелюстного зубного имплантата по изобразительной информации, относящейся к челюсти пациента, содержащая: (а) средство для формирования 3-мерных моделей зубного ряда, и (b) средство для автоматического поиска основных восстановительных элементов в 3-мерной модели зубного ряда на основе анализа изображений, при этом средство для формирования 3-мерных моделей зубного ряда дополнительно содержит средство для оцифровывания искомого зубного ряда, позиционированного надлежащим образом относительно челюсти посредством совмещения.
21. Система для подготовки информации для автоматизированного планирования внутричелюстного зубного имплантата по изобразительной информации, относящейся к челюсти пациента, содержащая: (а) средство для формирования 3-мерных моделей частей челюстной кости, и (b) средство для поиска анатомических и искусственных элементов в 3-мерной модели челюстной кости и для автоматического выбора зон в челюсти, в которых возможно или невозможно установить имплантаты, на основе анализа изображений, при этом средство для формирования 3-мерных моделей частей челюсти содержит: средство для разделения 3-мерной модели челюсти на несколько 2-мерных изображений срезов, средство для формирования панорамной кривой для каждого из 2-мерных изображений срезов, средство для оценки в каждом изображении среза, присутствует ли, по меньшей мере, один 2-мерный характерный элемент вдоль панорамной кривой, и средство для объединения информации о нескольких срезах для подтверждения присутствия зуба.
22. Машиночитаемый информационный носитель, хранящий компьютерный программный продукт, выполненный с возможностью исполнения способа по п.1 или 2.
23. Машиночитаемый информационный носитель, хранящий компьютерный программный продукт, выполненный с возможностью исполнения способа по п.3 или 4.
| СПОСОБ И СИСТЕМА ПОМОЩИ ПОЛЬЗОВАТЕЛЮ В САМОСТОЯТЕЛЬНОМ ПРОВЕДЕНИИ МЕДИЦИНСКИХ ПРОЦЕДУР, СОСТОЯЩИХ ИЗ НЕСКОЛЬКИХ ДЕЙСТВИЙ | 1999 |
|
RU2244506C2 |
| ОСТЕОИНТЕГРИРУЕМЫЙ ИМПЛАНТАТ С НАПРАВЛЕННОЙ РЕГЕНЕРАЦИЕЙ КОСТНОЙ ТКАНИ | 2002 |
|
RU2211003C1 |
| Способ определения окклюзии | 1987 |
|
SU1806691A1 |
| DE 19952962 A1, 17.05.2001 | |||
| US 5823778 A, 20.10.1998 | |||
| US 6540516 B1, 01.04.2003 | |||
| РАБУХИНА Н.А | |||
| и др | |||
| Рентгенодиагностика в стоматологии | |||
| - М., 1999 | |||
| ЛИНДЕНБРАТЕН Л.Д | |||
| и др | |||
| Медицинская радиология | |||
| - М., 2000, с.544-590. | |||

