Область техники, к которой относится изобретение
Настоящее изобретение имеет отношение к летательному аппарату, в особенности к способу маневрирования летательного аппарата на земле.
Уровень техники
Для летательного аппарата и особенно крупного летательного аппарата является желательным обладать способностью к маневрированию на земле в пределах круга крутого разворота. Разворот летательного аппарата в пределах круга крутого разворота известен в основном для осуществления разворота тормозами на месте. Разворот тормозами на месте в основном осуществляется за счет разворота носового колеса летательного аппарата с приложением дифференциальной тяги двигателя и тормозов для всех колес одного из шасси, грубо говоря, относительно которого летательный аппарат разворачивается.
Такое маневрирование создает значительные нагрузки от крутящего момента в шасси, которое находится внутри разворота, обусловленные тем, что шины колес не катятся, а скребут по земле, и на многих летательных аппаратах нагрузки от крутящего момента довольно большие, что вызывает усталостное разрушение конструкции шасси. Для летательного аппарата, у которого может возникать значительное усталостное разрушение, может быть запрещено выполнение подобного, как описано выше, маневрирования в виде разворота на месте, и поэтому ограничена наземная маневренность.
Раскрытие изобретения
Настоящее изобретение направлено на достижение способа разворота тормозами на месте летательного аппарата, который создает низкие нагрузки от крутящего момента в конструкции шасси, и/или позволяет уменьшить, по меньшей мере, некоторые из указанных выше проблем.
Настоящее изобретение предусматривает способ разворота посредством тормозов на месте и на земле летательного аппарата, включающего в себя фюзеляж и узел шасси, расположенный на одной его стороне и содержащий ходовую часть с группой колес, закрепленных на ней, из которых, по меньшей мере, одно колесо расположено на первой стороне ходовой части, и, по меньшей мере, одно колесо расположено на второй стороне ходовой части, в котором прикладывают тягу, необходимую для движения летательного аппарата, и тормозную силу на, по меньшей мере, одно колесо с ее распределением по силе торможения большей на первой стороне, чем на второй стороне, при этом в качестве первой стороны принимают сторону, расположенную ближе к центру разворота.
Разворот тормозами на месте в соответствии с вариантами осуществления настоящего изобретения может создавать более низкие нагрузки от крутящего момента в шасси, чем это происходит в развороте, когда тормозятся все колеса на шасси. Во время разворота на месте в соответствии с вариантами осуществления настоящего изобретения в узле шасси создается первичный крутящий момент за счет поворотного движения летательного аппарата и за счет того, что шины не катятся, а скребут по земле. Дополнительно, однако, в узле шасси создается вторичный крутящий момент, обусловленный дифференциальной тормозной силой, приложенной к одной из сторон ходовой части. За счет приложения тормозной силы, большей на первой стороне ходовой части узла шасси, чем на второй стороне, в соответствии с вариантами осуществления изобретения вторичный крутящий момент создается в направлении, противоположном первичному крутящему моменту. Эффективный (суммарный) крутящий момент, действию которого подвергается шасси, тем самым, снижается.
Понятно, что летательный аппарат обычно симметричен относительно его средней линии и, таким образом, обычно включает, по меньшей мере, два узла шасси, каждый из которых расположен на одной соответствующей стороне фюзеляжа. Летательный аппарат может включать и более чем два узла шасси.
Понятно также, что стадии (действия), характеризующие способы настоящего изобретения, не нуждаются в осуществлении в показанном порядке и могут, фактически, быть осуществлены в любом порядке.
Узел шасси может включать стойку, и вторичный крутящий момент в стойке может быть направлен противоположно первичному крутящему моменту, а следовательно, эффективный (суммарный) крутящий момент в стойке будет уменьшенным. Стойка может быть соединена с первой стороной ходовой части со сдвигом от нее. Стойка может быть соединена с ходовой частью с ее расположением между первой и второй сторонами. Упомянутое расположение может быть ровно посередине между первой и второй сторонами.
Шасси может быть расположено на одной стороне фюзеляжа вдоль размаха крыла внутри самого широкого места фюзеляжа, но предпочтительно, чтобы шасси располагалось вдоль размаха крыла снаружи самого широкого места фюзеляжа.
Тяга может быть дифференциальной, необходимой для разворота летательного аппарата. Понятно, что дифференциальная тяга может включать в себя прямую тягу (например, тягу движения летательного аппарата вперед) на одной стороне летательного аппарата. Дифференциальная тяга может включать обратную тягу на одной стороне летательного аппарата. Дифференциальная тяга может быть сочетанием прямой и обратной тяг. Дифференциальная тяга может включать результирующую прямую тягу. Тяга предпочтительно создается, по меньшей мере, одним двигателем на летательном аппарате. Результирующая тяга может действовать через центр тяги, расположенный на расстоянии от средней линии фюзеляжа. Расстояние вдоль размаха крыла от центра тяги до средней линии фюзеляжа может быть большим, чем расстояние вдоль размаха крыла от шасси до средней линии фюзеляжа. Результирующая тяга может, конечно, действовать очень близко к или, по существу, вдоль средней линии фюзеляжа. Такое может возникать, например, на летательном аппарате, имеющем конфигурацию гондолы задней части фюзеляжа (ЗФГ).
Обычно результирующая тяга представляет собой прямую тягу, а центр разворота расположен за пределами узла шасси (например, расстояние вдоль размаха крыла от центра разворота до средней линии фюзеляжа является большим, чем расстояние вдоль размаха крыла от узла шасси до средней линии фюзеляжа).
Тормозная сила может прилагаться к одному колесу или нескольким колесам, большей на первой стороне ходовой части, чем на второй стороне ходовой части. Обычно все колеса на первой стороне ходовой части полностью тормозятся, а все колеса на второй стороне ходовой части свободно вращаются. Альтернативно или дополнительно торможение может прикладываться для нескольких колес на второй стороне ходовой части после первой стороны ходовой части. По меньшей мере, одно колесо может быть заторможено на первой стороне ходовой части после второй стороны.
Летательный аппарат может двигаться с низкой скоростью во время маневрирования. Предпочтительно, чтобы летательный аппарат двигался бы со скоростью меньше, чем  . Более предпочтительно, чтобы летательный аппарат двигался со скоростью меньше, чем
. Более предпочтительно, чтобы летательный аппарат двигался со скоростью меньше, чем  . Летательный аппарат может двигаться также со скоростью меньше, чем
. Летательный аппарат может двигаться также со скоростью меньше, чем  . Так как летательный аппарат стремится вращаться вокруг заданной точки, скорость в различных точках летательного аппарата различается в зависимости от их расстояния от центра разворота. Будет понятным, что ссылки здесь на скорость летательного аппарата во время маневрирования относятся к скорости в точке в носовой части летательного аппарата и более предпочтительно к скорости в точке, находящейся на средней линии летательного аппарата, которая простирается по шасси, являющемуся опорой для носового колеса на летательном аппарате.
. Так как летательный аппарат стремится вращаться вокруг заданной точки, скорость в различных точках летательного аппарата различается в зависимости от их расстояния от центра разворота. Будет понятным, что ссылки здесь на скорость летательного аппарата во время маневрирования относятся к скорости в точке в носовой части летательного аппарата и более предпочтительно к скорости в точке, находящейся на средней линии летательного аппарата, которая простирается по шасси, являющемуся опорой для носового колеса на летательном аппарате.
Летательный аппарат может дополнительно включать носовое колесо. Будет понятным, что разворот носового колеса на угол к средней линии фюзеляжа может улучшать круг разворота летательного аппарата и/или снижать напряжения в шасси летательного аппарата и в особенности в носовом шасси. Летательный аппарат может, конечно, включать множество носовых колес, и ссылки на носовое колесо будут интерпретироваться соответственно. Способ в соответствии с вариантами осуществления настоящего изобретения может дополнительно включать стадию разворота носового колеса на угол к средней линии фюзеляжа летательного аппарата. Угол предпочтительно составляет больше, чем 30 градусов. Более предпочтительно угол составляет больше, чем 45 градусов. Более предпочтительно угол составляет больше, чем 60 градусов.
Будет понятным специалисту в области техники, что носовое колесо может быть развернуто или по направлению к или от направления разворота летательного аппарата. Типично носовое колесо разворачивается в направлении разворота летательного аппарата так, чтобы колесо приводилось прямо во время маневрирования в виде разворота на месте.
Способ согласно изобретению может дополнительно характеризоваться действиями по приему сигнала, относящемуся к параметру летательного аппарата, и приложению тормозной силы в зависимости от сигнала.
Способ может характеризоваться действиями по приему множества сигналов, относящихся к параметрам летательного аппарата. Параметром летательного аппарата или одним из параметров летательного аппарата может быть скорость летательного аппарата. Параметром летательного аппарата или одним из параметров летательного аппарата может быть угол носового колеса к средней линии фюзеляжа летательного аппарата. Параметром летательного аппарата или одним из параметров летательного аппарата может быть любой следующий один или несколько параметров: тяга двигателя летательного аппарата, расположение и/или величина результирующей тяги, расположение центра разворота, данные, которые позволяют определить расположение центра разворота.
Кроме вышеизложенного способ согласно изобретению может дополнительно характеризоваться действиями по сравнению величины параметра летательного аппарата с пороговым параметром летательного аппарата и приложению тормозной силы при превышении величины параметра за пределами порогового параметра.
Соответственно варианты осуществления настоящего изобретения могут использоваться при приложении тормозной силы, большей на первой стороне ходовой части узла шасси, чем на второй стороне, только при определенных условиях. Например, тормозная сила, большая на первой стороне ходовой части узла шасси, чем на второй стороне, может быть приложена, когда угол носового колеса к средней линии фюзеляжа больше, чем пороговый. Порог может быть задан.
Способ может характеризоваться также действиями по распределению тормозной силы по одной из сторон ходовой части. Действия по распределению тормозной силы могут быть полностью автоматическими.
Способ согласно изобретению может характеризоваться действиями по приему сигнала, относящегося к процессу торможения колес шасси летательного аппарата (например, когда пилот начинает тормозить колесами шасси) и приложению тормозной силы в соответствии с изобретением в зависимости от этого сигнала. Варианты осуществления настоящего изобретения могут тем самым обеспечивать способ, который выборочно управляет торможением колес на шасси летательного аппарата во время разворота тормозами на месте летательного аппарата с относительно низким влиянием входного сигнала, исходящего от пилота летательного аппарата.
Варианты осуществления настоящего изобретения могут также обеспечивать устройство управления торможением для осуществления, по меньшей мере, одного из действий согласно способу, раскрытому здесь. В предпочтительном варианте устройство управления торможением выполняется с возможностью торможения, по меньшей мере, одного колеса на узле шасси в соответствии с изобретением. Устройство управления торможением может быть выполнено с возможностью торможения, по меньшей мере, одного колеса на узле шасси в соответствии с изобретением в зависимости от сигнала или, более предпочтительно, множества сигналов. Например, устройство управления торможением может быть выполнено с возможностью торможения, по меньшей мере, одного колеса на шасси, когда скорость летального аппарата ниже пороговой величины, а угол носового колеса выше пороговой величины, пороговые величины являются определенными за счет сигнала или сигналов, принимаемых устройством управления торможением.
В соответствии с другим аспектом настоящего изобретения здесь обеспечивается устройство управления выборочным торможением колес узла шасси при развороте на месте посредством тормозов летательного аппарата, содержащего фюзеляж и узел шасси, расположенный на одной его стороне и имеющий ходовую часть с группой колес, закрепленных на ней, из которых, по меньшей мере, одно колесо расположено на первой стороне ходовой части, и, по меньшей мере, одно колесо расположено на второй стороне ходовой части, которое выполнено с возможностью действия на, по меньшей мере, одном колесе тормозной силы, большей на первой стороне ходовой части, чем на второй стороне, при этом первая сторона расположена ближе к центру разворота летательного аппарата, чем вторая сторона.
Устройство управления торможением может включать приемник входного сигнала, относящегося к приложению тормозной силы на колеса шасси летательного аппарата, при этом устройство управления торможением может быть выполнено с возможностью действия тормозной силы в зависимости от сигнала, принимаемого приемником входного сигнала. Приемник входного сигнала торможения может принимать сигнал, когда пилот начинает тормозить колеса шасси. Варианты осуществления настоящего изобретения могут тем самым обеспечивать устройство управления торможением, которое выборочно управляет торможением колес на шасси летательного аппарата во время разворота тормозами на месте летательного аппарата, с относительно низким влиянием входного сигнала, исходящего от пилота летательного аппарата.
Устройство управления торможением предпочтительно может дополнительно содержать первый приемник для приема сигнала, относящегося к параметру летательного аппарата. Устройство управления торможением может включать также группу приемников для приема сигнала или сигналов, относящихся к множеству параметров летательного аппарата. Параметром летательного аппарата может, например, быть скорость летательного аппарата. Параметром летательного аппарата может быть угол носового колеса к средней линии фюзеляжа летательного аппарата.
Устройство управления торможением может быть выполнено с возможностью торможения, по меньшей мере, одного колеса, и в зависимости от сигнала или сигналов, принимаемых, по меньшей мере, одним приемником, и более предпочтительно дополнительно в зависимости от сигнала, принимаемого приемником входного сигнала торможения, приложения тормозной силы, большей на первой стороне ходовой части узла шасси, чем на второй стороне.
Устройство управления торможением может дополнительно включать базу данных для хранения параметров летательного аппарата порога сравнения.
Устройство управления торможением может быть выполнено с возможностью сравнения величины параметра летательного аппарата с пороговым параметром летательного аппарата и может быть выполнено с возможностью приложения тормозной силы на, по меньшей мере, одно колесо в зависимости от сравнения параметра летательного аппарата с пороговым параметром летательного аппарата.
Варианты осуществления настоящего изобретения могут, следовательно, обеспечивать способ и устройство управления торможением, которые выборочно управляют торможением колес на шасси летательного аппарата во время разворота тормозами на месте, с относительно низким влиянием входного сигнала, исходящего от пилота летательного аппарата. Способ и устройство управления торможением могут регулировать выборочное торможение колес на шасси летательного аппарата во время разворота тормозами на месте при нахождении одного или нескольких параметров за пределами определенных пороговых значений. Например, если пилот летательного аппарата пытается маневрировать тормозами летательным аппаратом на земле носовым колесом под углом 70 градусов и всеми колесами на узле шасси (предпочтительно на узле шасси внутри разворота), то устройство управления торможением может регулировать процесс выборочного торможения колес на шасси летательного аппарата в соответствии с изобретением так, что вторичный крутящий момент будет возникать в направлении, противоположном первичному крутящему моменту.
В соответствии с другим аспектом настоящего изобретения здесь обеспечивается летательный аппарат для применения в способе изобретения, как он раскрыт здесь, в котором летательный аппарат выполнен так, что может прилагаться тормозная сила, большая на первой стороне ходовой части узла шасси, чем на второй стороне.
В соответствии с другим аспектом настоящего изобретения здесь обеспечивается летательный аппарат, включающий устройство управления торможением, как оно раскрыто здесь.
В соответствии с еще одним аспектом настоящего изобретения здесь дополнительно обеспечивается способ разворота посредством тормозов на месте и на земле летательного аппарата, включающего в себя фюзеляж и два узла шасси, расположенных на каждой из сторон фюзеляжа и каждый содержащий ходовую часть с группой колес, закрепленных на ней, из которых, по меньшей мере, одно колесо расположено на внутренней стороне ходовой части, и, по меньшей мере, одно колесо расположено на внешней стороне ходовой части, в котором прикладывают тягу, необходимую для движения летательного аппарата, и тормозную силу на, по меньшей мере, одно колесо узла шасси, расположенного ближе к центру разворота летательного аппарата, при этом прикладывают тормозную силу на, по меньшей мере, одно колесо, большую на внешней стороне ходовой части названного узла шасси, чем на внутренней стороне.
Настоящее изобретение имеет более значительное применение для крупных летательных аппаратов, в частности для летательных аппаратов, у которых вес - предпочтительно тяжелее, чем 50 тонн сухого веса, и более предпочтительно тяжелее, чем 200 тонн сухого веса, в частности для тех летательных аппаратов, которые предпочтительно предназначены для перемещения более, чем 75 пассажиров, и более предпочтительно более, чем 200 пассажиров.
Варианты осуществления настоящего изобретения могут в равной мере применяться для других типов разворотов в тесных условиях, таких как, например, маневр Джекобса.
Будет понятным, что аспекты изобретения, раскрытые относительно способов изобретения, могут равно быть применены для любого раскрытого выше устройства согласно изобретению, такого как летательный аппарат и устройство управления торможением, или для любых других способов согласно изобретению, и наоборот.
Краткое описание чертежей
Варианты осуществления изобретения сейчас будут раскрыты, например, только со ссылкой на сопровождающие схематичные чертежи, на которых:
Фигуры 1-4 показывают летательный аппарат, осуществляющий разворот тормозами на месте,
Фигуры 5-7 представляют собой изображения в результате компьютерного моделирования, показывающие нагрузки в узле шасси во время трех различных разворотов тормозами на месте, и
Фигура 8 представляет собой вид сверху ходовой части на летательном аппарате, осуществляющем первый тип разворота тормозами на месте в соответствии с вариантом осуществления настоящего изобретения.
Осуществление изобретения.
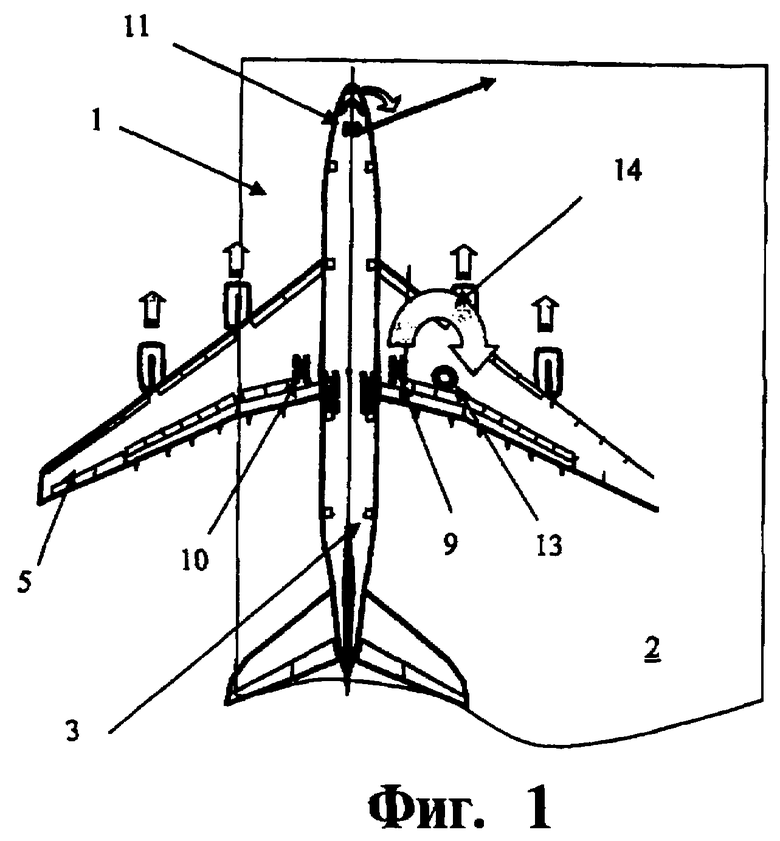
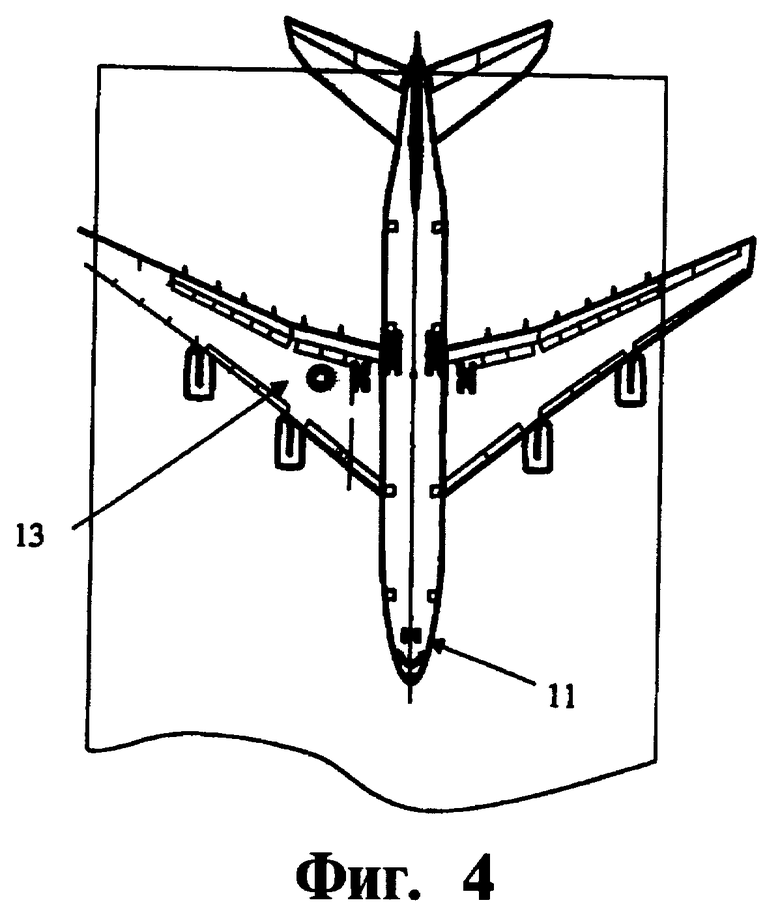
Фигуры 1-4 показывают вид сверху летательного аппарата 1, осуществляющего разворот тормозами на месте на узкой взлетно-посадочной полосе 2. Летательный аппарат включает фюзеляж 3 и крылья 5, и четыре двигателя 7. Два узла шасси 9, 10 расположены под крыльями 5 и на одной из сторон фюзеляжа 3. Каждый узел шасси включает (со ссылкой на фигуру 8) стойку 15, ходовую часть 17, соединенную в ее центре с ней, и две пары колес 19, 20, закрепленных на ходовой части. Два колеса 19а, 20а расположены на первой стороне ходовой части, и два колеса 19b, 20b расположены на второй стороне ходовой части. Летательный аппарат также включает носовое колесо 11, расположенное спереди фюзеляжа.
На фигуре 1 летательный аппарат 1 достиг конца узкой взлетно-посадочной полосы 2 и должен, следовательно, осуществлять крутой правосторонний разворот. Двигатели на земле находятся на малом газе и производят только малое количество прямой тяги (показанной стрелкой 7' на фигурах 1-4). Прямая скорость летательного аппарата приблизительно равна  .
.
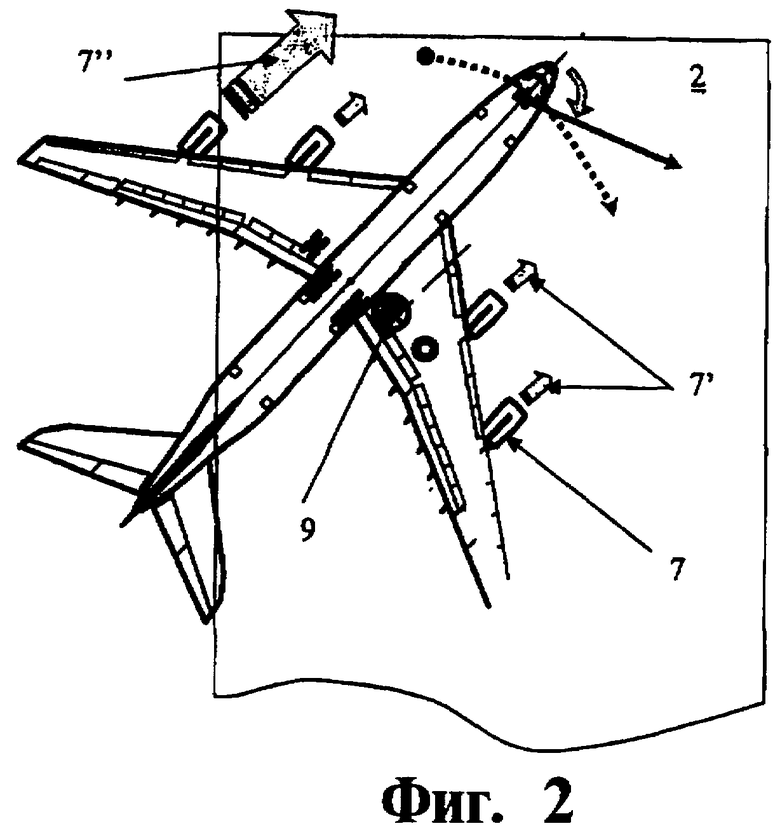
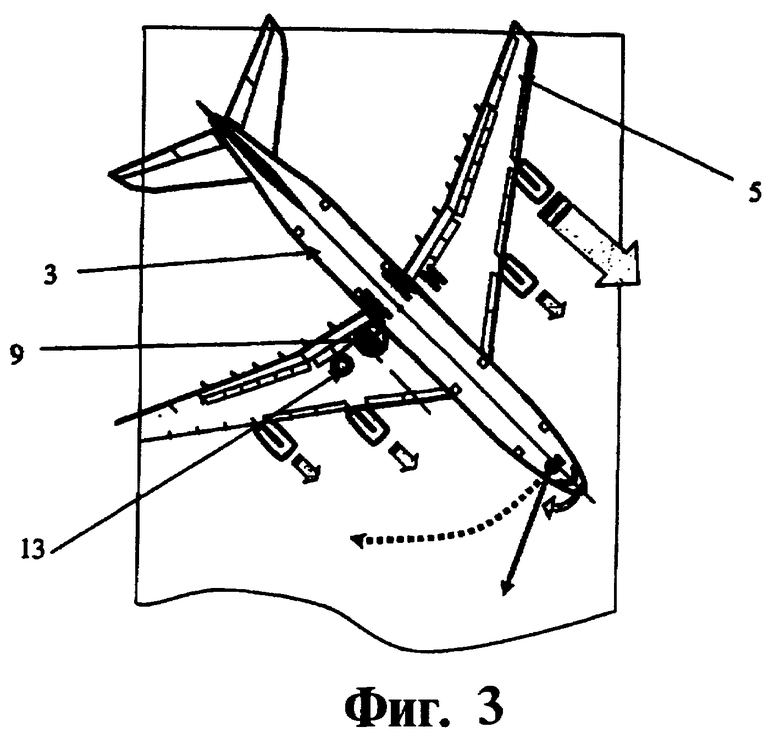
Как известно из уровня техники, выполнение первого типа разворота тормозами на месте пилот осуществляет в три этапа. Сначала носовое колесо 11 разворачивается в одну сторону. Затем пилот тормозит колеса одного из шасси 9, показанным зачеркнутым крестиком кругом на фигурах 2 и 3. В конце создается тяга, необходимая для разворота летательного аппарата. В первом варианте осуществления прямая тяга 7” левого крайнего двигателя увеличивает малый газ. Суммарное действие тяг двигателей является результирующей тягой (не показано). Результирующая тяга действует через центр тяги (не показан), расположенный на расстоянии от средней линии фюзеляжа, и вблизи левостороннего крайнего двигателя.
Летательный аппарат, таким образом, разворачивается в малом круге разворота относительно центра разворота 13, расположенного вблизи шасси 9, к которому прилагается тормозная сила. Шасси двигается, изначально вперед, делая крутой поворот 14 (движение шасси было увеличено ради ясности). Когда летательный аппарат развернут на 180 градусов, пилот снижает тягу крайнего двигателя до малого газа, выпрямляет носовое колесо и выключает тормоза на шасси 9.
В развороте тормозами на месте согласно уровню техники все колеса на шасси 9 тормозятся во время маневрирования. Это создает большой крутящий момент в стойке узла шасси 9, обусловленный тем, что шины не катятся, а скребут по взлетно-посадочной полосе 2. В соответствии с настоящим вариантом осуществления изобретения, однако, только колеса 19а, 20а на стороне ходовой части 17, расположенной ближе к центру разворота 13, тормозятся. Как сейчас будет раскрыто со ссылкой на фигуры 2 и 3, это снижает крутящий момент, действию которого подвергается стойка 15. Считается, что выборочное торможение колес ходовой части создает вторичный крутящий момент, который действует в направлении, противоположном указанному выше крутящему моменту, создаваемому за счет того, что шины не катятся, а скребут по взлетно-посадочной полосе, тем самым снижая общий крутящий момент.
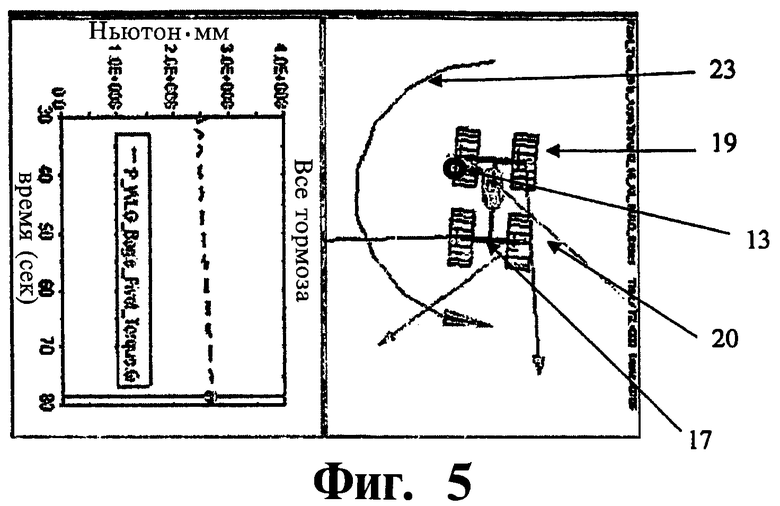
Фигуры 5-7 включают изображения в результате компьютерного моделирования, показывающие нагрузки в узле шасси во время трех различных разворотов тормозами на месте. Графические изображения показывают крутящий момент в основании шасси во временной период от 30 до 80 секунд во время трех различных разворотов тормозами на месте.
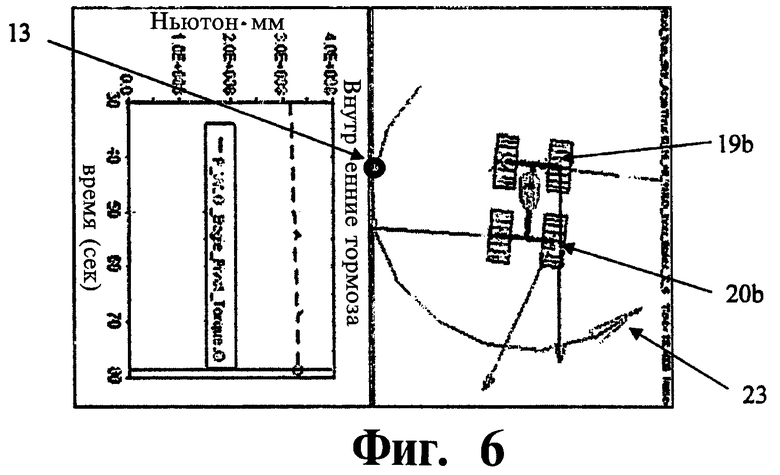
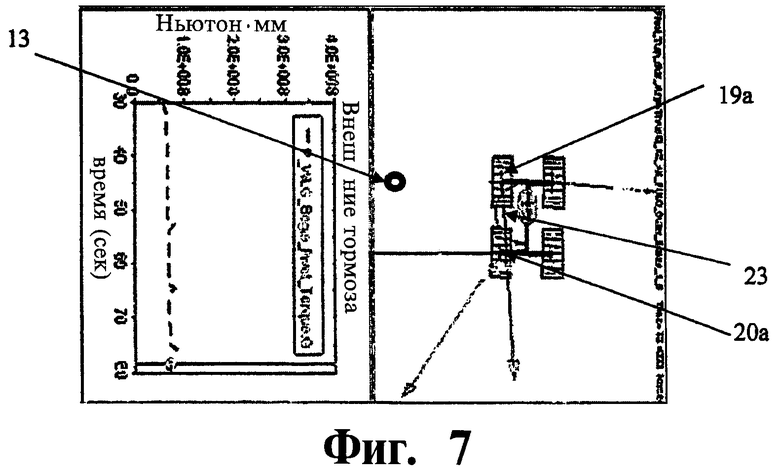
Фигура 5 показывает маневрирование, в котором все четыре колеса на ходовой части тормозятся, фигура 6 показывает маневрирование, в котором только колеса на стороне ходовой части, более отдаленной от центра разворота, тормозятся, и фигура 7 показывает маневрирование, в котором только колеса на стороне ходовой части, приближенной к центру разворота, тормозятся. Стрелка 23 показывает оба направления и величину сил на колесах и стойке шасси. Чем длиннее стрелка, тем больше величина силы.
Если рассмотреть сначала фигуру 5, то нагрузки, показанные на узле шасси, возникают во время маневрирования в виде торможения на месте, в котором все четыре колеса 19, 20 на ходовой части 17 тормозятся. Когда летательный аппарат 1 разворачивается, колеса 19, 20 подвергаются действию значительной фрикционной нагрузки из-за того, что шины не катятся, а скребут по взлетно-посадочной полосе. Фрикционная сила на каждое колесо действует в разном направлении, но суммарный эффект от того, что колеса не катятся, а скребут, вызывает первичный крутящий момент 23 в стойке шасси. Как показано на графическом изображении, крутящий момент составляет приблизительно 2,5×108 Н·мм в течение временного периода измерения.
Если рассмотреть теперь фигуру 6, то нагрузки, показанные на узле шасси, возникают во время маневрирования в виде торможения на месте, в котором только колеса на стороне ходовой части 17, более отдаленной от центра разворота 13, тормозятся. Когда летательный аппарат 1 разворачивается, тормозящиеся колеса еще подвергаются действию рассматриваемой фрикционной нагрузки, обусловленной тем, что шины 19b, 20b не катятся, а скребут по взлетно-посадочной полосе. Эта фрикционная нагрузка создает первичный крутящий момент (не показан) в стойке шасси 15. Суммарный (эффективный) крутящий момент 23 в стойке 15 составляет, однако, приблизительно 3,2×108 Н·мм в течение временного периода измерения. Это значительно выше, чем на фигуре 5. Считается, что увеличение крутящего момента обусловлено вторичным крутящим моментом, вызываемым дифференциальной тормозной силой на ходовой части, вторичный крутящий момент действует в том же направлении, что и указанный выше первичный крутящий момент.
Фигура 7 показывает нагрузки в узле шасси во время маневрирования в виде торможения на месте, в котором только колеса 19а, 19b на стороне ходовой части 17, которая приближена к центру разворота 13, тормозятся (например, в соответствии с способом, согласно вариантам осуществления настоящего изобретения). Когда во время раскрытого выше маневрирования летательный аппарат 1 разворачивается, тормозящиеся колеса подвергаются действию рассматриваемой фрикционной нагрузки, обусловленной тем, что шины не катятся, а скребут по взлетно-посадочной полосе. Эта фрикционная нагрузка создает первичный крутящий момент в шасси. Эффективный (суммарный) крутящий момент 23 в стойке составляет, однако, приблизительно 0,5×108 Н·мм в течение временного периода измерения. Это значительно ниже, чем на фигуре 5 (и 6). Считается, что снижение крутящего момента обусловлено вторичным крутящим моментом, вызываемым дифференциальной тормозной силой на ходовой части, вторичный крутящий момент действует в направлении, противоположном первичному крутящему моменту.
Таким образом, специалисту будет очевидно, что осуществление способа согласно вариантам осуществления настоящего изобретения создает предпосылки для значительно более низкого крутящего момента в узле шасси, чем осуществление разворота тормозами на месте согласно предшествующему уровню техники. Для крупных летательных аппаратов, у которых прежде было запрещено выполнение таких маневров, может тем самым позволяться осуществление разворота тормозами на месте в соответствии с вариантами осуществления настоящего изобретения и, таким образом, возможность разворота по крутому радиусу.
Фигура 8 показывает вид сверху ходовой части 17 на летательном аппарате 1, осуществляющем разворот тормозами на месте в соответствии с первым вариантом осуществления настоящего изобретения. Летательный аппарат 1 включает устройство управления торможением (не показано), которое позволяет каждому из колес 19а, 19b, 20a, 20b индивидуально тормозиться.
Как показано на фигуре 7 и раскрыто выше, колеса 19а, 20a на стороне ходовой части 17, приближенной к центру разворота 13, тормозятся, а колеса на другой стороне ходовой части 17 свободно вращаются.
В соответствии со вторым вариантом осуществления настоящего изобретения (не показан) летательный аппарат предусмотрен с устройством управления торможением, включающим блок управления, приемник наземной скорости и приемник угла носового колеса. Устройство управления торможением также включает приемник входного сигнала торможения, который принимает сигнал, когда пилот пытается применить тормоза для колес шасси.
Блок управления приспособлен для приема сигналов, относящихся к скорости летательного аппарата и углу носового колеса, приемником наземной скорости и приемником угла носового колеса. Блок управления также приспособлен для сравнения сигнала, принимаемого приемником наземной скорости, и сигнала, принимаемого индикатором носового колеса, с пороговым параметром, хранящимся в базе данных в устройстве управления торможением. Во втором варианте осуществления скорость летательного аппарата ниже пороговой величины  , а угол носового колеса выше, чем пороговая величина 60 градусов к центру фюзеляжа. Во время использования приемник входного сигнала торможения принимает сигнал, обусловленный применением пилотом тормозов. Блок управления сравнивает сигналы приемников с параметром порога сравнения. В этом предпочтительном варианте осуществления скорость и угол носового колеса находятся за пределами их относительных порогов. Блок управления торможением, следовательно, осуществляет приложение тормозов только к колесам на стороне ходовой части, приближенной к центру разворота. Крутящий момент в стойке шасси тем самым сохраняется на допустимом уровне, при котором возникает относительно малое усталостное повреждение.
, а угол носового колеса выше, чем пороговая величина 60 градусов к центру фюзеляжа. Во время использования приемник входного сигнала торможения принимает сигнал, обусловленный применением пилотом тормозов. Блок управления сравнивает сигналы приемников с параметром порога сравнения. В этом предпочтительном варианте осуществления скорость и угол носового колеса находятся за пределами их относительных порогов. Блок управления торможением, следовательно, осуществляет приложение тормозов только к колесам на стороне ходовой части, приближенной к центру разворота. Крутящий момент в стойке шасси тем самым сохраняется на допустимом уровне, при котором возникает относительно малое усталостное повреждение.
Несмотря на то, что настоящее изобретение было раскрыто и проиллюстрировано относительно предпочтительных вариантов осуществления, среднему специалисту в области техники будет понятно, что изобретение само по себе является подходящим для множества различных изменений, конкретно не показанных здесь. Например, некоторые изменения раскрытых выше вариантов осуществления сейчас будут раскрыты. Каждое шасси не обязательно должно включать четыре колеса. Например, шасси может включать два колеса (в таком случае будет понятным, что термин "ходовая часть" означает конструкцию на одном конце основания шасси, которая общая для обоих колес, например полуось). Шасси может включать 6 или более колес. Стадии выполнения осуществления разворота тормозами на месте не обязательно должны быть произведены в порядке, раскрытом выше. Чем делать маневр Джекобса, лучше осуществлять разворот тормозами на месте, раскрытый в отношении первого варианта осуществления изобретения.
Там, где в вышеприведенном описании упомянуты целые части или элементы, которые известны, очевидны или имеют очевидные эквиваленты, такие эквиваленты здесь включены так, как будто они явным образом раскрыты. Следует проводить параллели с формулой изобретения для определения истинной области настоящего изобретения, который должен толковаться таким образом, чтобы охватывать любой из таких эквивалентов. Будет также понятно из описания, что целые части или признаки изобретения, которые раскрыты в качестве предпочтительных, преимущественных, подходящих и тому подобного, являются необязательными и не ограничивают объем независимых пунктов формулы изобретения.
Изобретение относится к области авиации, более конкретно к способу разворота летательного аппарата на земле. Способ разворота летательного аппарата, включающего в себя фюзеляж и два узла шасси, содержащих ходовую часть с группой колес, закрепленных на ней, а также содержащего устройство выборочного торможения колес, заключается в том, что прикладывают тягу, необходимую для движения летательного аппарата, и тормозную силу на одно колесо узла шасси, расположенного ближе к центру разворота летательного аппарата. При этом прикладывают тормозную силу на одно колесо, большую на первой стороне ходовой части узла шасси, чем на второй стороне, и в качестве первой стороны принимают сторону, расположенную ближе к центру разворота. Технический результат направлен на снижение нагрузок в конструкции стойки шасси, возникающих при развороте летательного аппарата на земле. 2 н. и 10 з.п. ф-лы, 8 ил.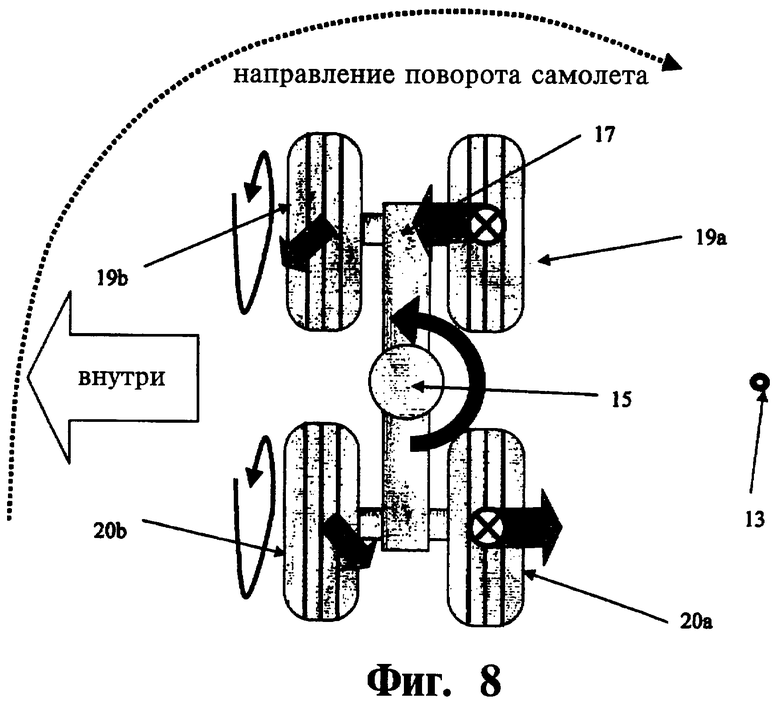
1. Способ разворота посредством тормозов на месте и на земле летательного аппарата, включающего в себя фюзеляж и два узла шасси, расположенных на каждой из сторон фюзеляжа и каждый содержащий ходовую часть с группой колес, закрепленных на ней, из которых, по меньшей мере, одно колесо расположено на первой стороне ходовой части, и, по меньшей мере, одно колесо расположено на второй стороне ходовой части, в котором прикладывают тягу, необходимую для движения летательного аппарата, и тормозную силу на, по меньшей мере, одно колесо узла шасси, расположенного ближе к центру разворота летательного аппарата, при этом прикладывают тормозную силу на, по меньшей мере, одно колесо, большую на первой стороне ходовой части узла шасси, чем на второй стороне и в качестве первой стороны принимают сторону, расположенную ближе к центру разворота.
2. Способ по п.1, в котором первая сторона является внешней стороной ходовой части, а вторая сторона является внутренней стороной ходовой части.
3. Способ по п.1, в котором тяга является дифференциальной тягой, необходимой для разворота летательного аппарата.
4. Способ по п.1, в котором тормозят, по меньшей мере, еще одно колесо на первой стороне ходовой части в дополнение к тормозной силе, прикладываемой ко второй стороне.
5. Способ по п.1, в котором применяют скорость летательного аппарата менее чем 37 км/ч.
6. Способ по п.1 для летательного аппарата, дополнительно имеющего носовое колесо, в котором дополнительно осуществляют разворот носового колеса на угол, больший, чем 45°, к средней линии фюзеляжа летательного аппарата.
7. Способ по п.1, в котором тормозную силу прилагают в зависимости от принимаемого первого сигнала, относящегося к параметру летательного аппарата.
8. Способ по п.7, в котором параметр летательного аппарата сравнивают с пороговым значением, а тормозную силу прилагают при превышении параметром летательного аппарата порогового значения.
9. Способ по п.1, который применяют по отношению к летательному аппарату тяжелее, чем 50 т сухого веса.
10. Летательный аппарат, включающий фюзеляж, два узла шасси, каждый из которых расположен на одной соответствующей стороне фюзеляжа, и содержащий ходовую часть с группой колес, закрепленных на ней, из которых, по меньшей мере, одно колесо расположено на первой стороне ходовой части, и, по меньшей мере, одно колесо расположено на второй стороне ходовой части и устройство управления выборочным торможением колес узла шасси, расположенного ближе к центру разворота летательного аппарата при развороте на месте посредством тормозов, которое выполнено с возможностью действия на, по меньшей мере, одном колесе тормозной силы, большей на первой стороне ходовой части, чем на второй стороне, при этом первая сторона расположена ближе к центру разворота летательного аппарата, чем вторая сторона.
11. Аппарат по п.10, который выполнен с возможностью действия тормозной силы в зависимости от сигнала и содержит приемник входного сигнала торможения колес шасси летательного аппарата.
12. Аппарат по п.10, который дополнительно содержит первый приемник сигнала, относящегося к параметру летательного аппарата, базу данных для хранения порогового параметра летательного аппарата и в котором устройство управления выборочным торможением колес узла шасси выполнено с возможностью сравнения величины параметра летательного аппарата с пороговым параметром летательного аппарата и с возможностью действия тормозной силы на, по меньшей мере, одном колесе в зависимости от сравнения параметра летательного аппарата с пороговым параметром летательного аппарата.
| Бульдозерное оборудование | 1988 |
|
SU1573100A1 |
| US 2005231031 A, 20.10.2005 | |||
| Способ формирования магнитного поля | 1973 |
|
SU481946A1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ САМОЛЕТОВ ПО АЭРОДРОМУ | 0 |
|
SU339462A1 |

