Изобретение относится к транспортному машиностроению, в частности к безрельсовым транспортным колесно- гусеничным тележкам для перемещения по ровной поверхности и лестничным маршам.
Цель изобретения - упрощение управления тележкой при одновременном улучшении условий транспортировки груза.
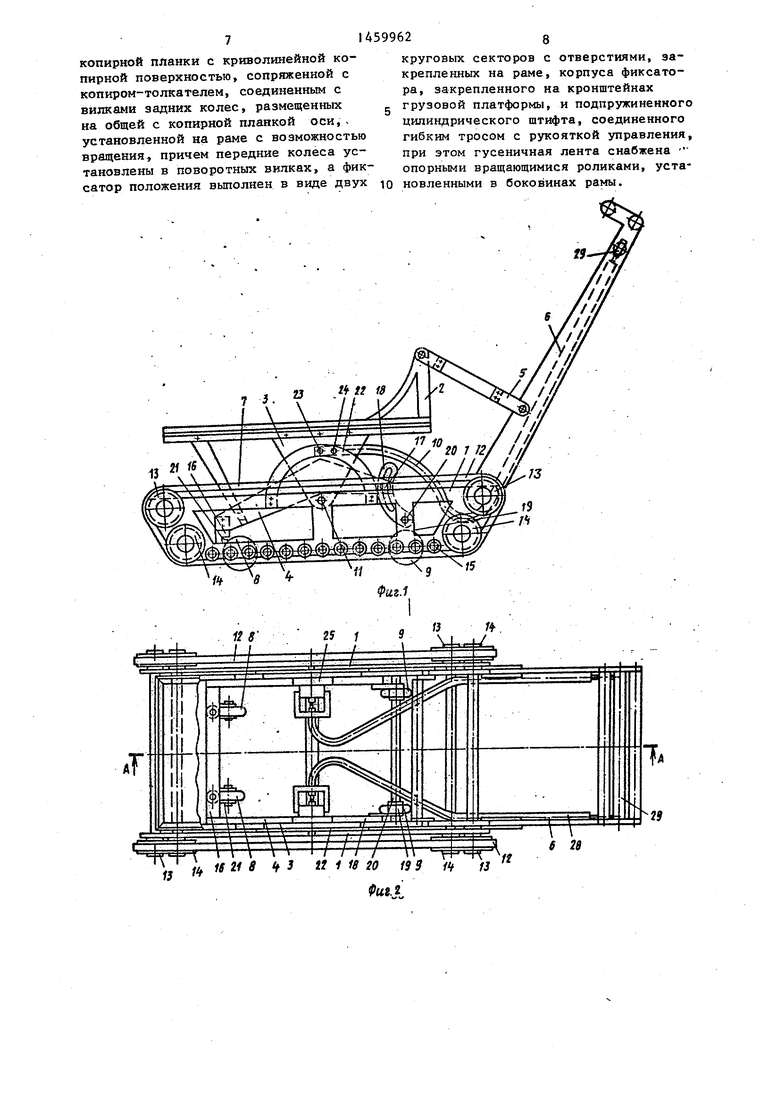
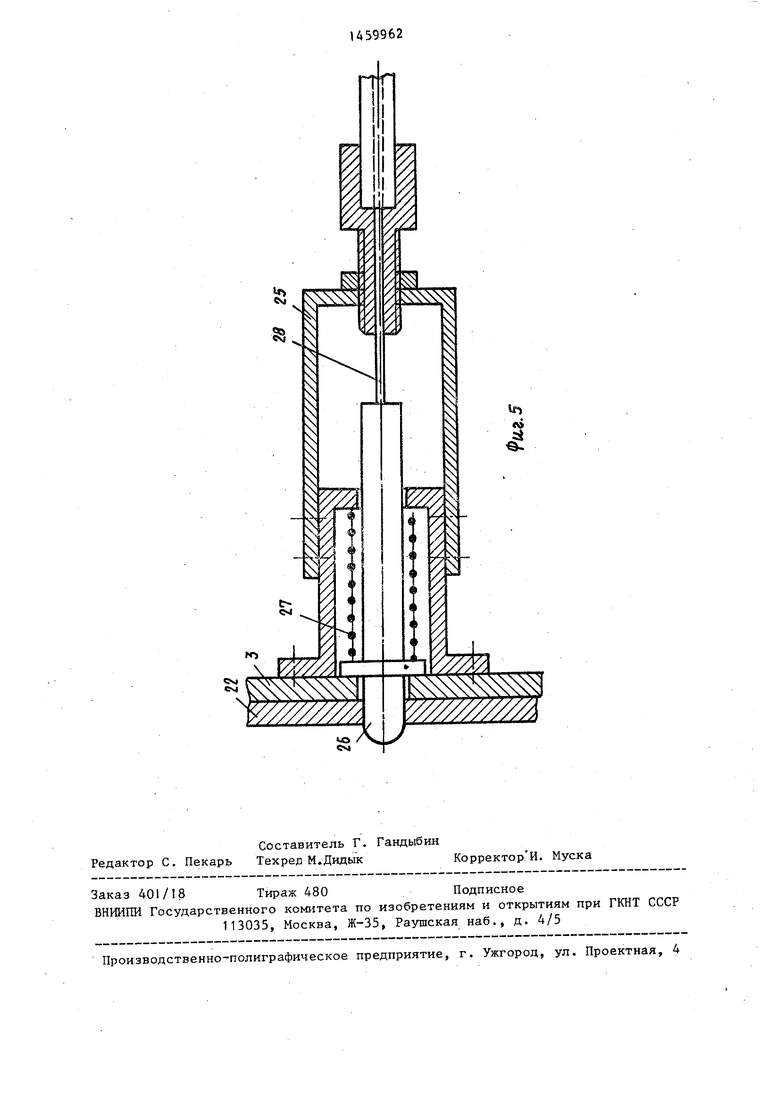
На фиг. 1 приведена транспортная тележка, вид сбоку; на фиг.2 - то же, вид в плане; на фиг. 3 - разрез А-А на фиг.2; на фиг.4 - тележка при движении по лестнице; на фиг.5 - фиксатор положения в сборе.
Устройство состоит из рамы 1, грузовой платформы 2, на которой жестко закреплены кронштейны 3 и двуплечие рычаГи 4, соединительной тяги 5,
1459962
замкнутой тяговой ручки 6, системы ходовых гусениц 7 и ходовых колес 8 и 9, а также, фиксатора 10 положения грузовой платформы.; g
Грузовая платформа 2 соединена с рамой 1 шарнирной осью 11. Ходовые гусеницы 7 расположены по обе стороны рамы и включают бесконечную ленту 12, надетую на шкивы 13 и 14, а также ю опорные вращающиеся ролики 15, сопряженные с нижним прямолинейным участком бесконечной ленты. Оси верхних
опорной поверхности ходовых колес 8 и 9. Угол наклона грузовой платт формы в направлении замкнутой тяговой ручки при этам составляет 5-10 . Длина рабочей поверхности гусеницы 7 выполнена из условий захвата по крайней мере трех ступенек лестницы.
Шарнирная ось 11, соединяющая грузовую платформу 2 с рамой 1, размещена вблизи центра тяжести грузовой платформы.
Опорные ролики 15, сопряженные с нижней прямолинейной частью бесконеч13 и нижних 14 шкивов, иоси опорных .... ..,.........-..-
роликов 15 закреплены в боковинах ра- 15 ной ленты (гусеницы), выполнены диа- мы 1, при этом верхние шкивы 13 уста- метром, меньшим по величине диаметра новлены с возможностью- перемещения, необходимого для натяжения бесконечной ленты.
Двуплечий рычаг 4 грузовой плат- 20 формы 2 одним концом, с передней части тележки, соединен неподвижно с передним мостом 16 передних колес 8, на другом плече закреплен копир-толколес 13 и 14, на которые j надета бесконечная лента. Диаметр опорных роликов выбран из соотношения dp (0,4-0,5)D, где dp - диаметр опорных роликов, - диаметр шкивов. Шаг расположения опорных роликов составляет мм.
Шкивы 13 и 14 и опорные ролики 15
катель 17, который сопряжен с криво- 25 снабжены канавками, поверхность кото- линейной поверхностью копирной план- рых сопряжена с бесконечной лентой ки 18, закрепленной на общей с вилка- 12. Бесконечная лента 12 выполнена ми 19 задних колес 9 аси 20, т.е. сечением, соответствующим форме ка- другим концом двуплечий рычаг соеди- навки на шкивах и опорных роликах, нен с задними колесами 9. Ось 20 ус- 30 например тановлена в раме 1 с возможностью вращения .
Передние колеса 8 смонтированы в поворотных вилках 21, имеющих возможность вращения вокруг своей оси.
Фиксатор 10 положения грузовой платформы 2 включает круговые секторы 22 с отверстиями 23 и 24, закрепленные по сторонам рамы, корпус 25
фиксатора закрепленный на внутренней 40 Фа дороги от горизонтального уровня, стороне кронштейнов 3, цилиндрический например в предлагаемой конструкции
сектором 45 .
Исходное положение замкнутой тяговой ручки 6 определено длиной соеди- 45 нительной тяги 5, выбарнной исходя из условий эргономики управления и
превышающей глубину канавок, из материала, например, резины или резино- ткани.
Копирный паз в копирной планке 18 ос вьшолнен радиусом обратной кривизны,
J3
равным половине радиуса качания тал- кателя 17 плеча двуплечего рычага 4 в угловом секторе, выбранном из максимально возможного отклонения рельештифт 26, подпружиненный пружиной 27 и соединенный гибким тросиком 28 с рукояткой 29 зшравдения, размещен- Hog на замкнутой тяговой ручке 6.
Позицией 23 обозначены фиксирую- отверстия при движении тележки на горизонтальных площадках на ходовых колесах 8 и 9, когда опорная поверхность колес 8 и 9 ниже опорной поверхности ходовых гусениц 7, поло- , жение грузовой платформы при этом горизонтальное
обслуживания тележки.
Устройство работает следующим образом.
СП При перемещении тележки по ровной поверхности на ходовых колесах (фиг.1) опорная поверхность ходовых колес 8 и 9 ниже опорной поверхности гусениц 7, тележка опирается и каонгадьиие., .
Позицией 24 обозначены отверстия ,, ™-я на колесах. При этом штифт 2
для фиксации грузовой, платформы с рамой при перемещении тележки по горизонтали на гусеничном ходу, когда опорная поверхность гусениц 7 ниже
под воздействием пружины 27 входит в отверстие 23 кругового сектора 22 и стопорит грузовую .платформу с гр 3QM и с рамой в горизонтальном поло
опорной поверхности ходовых колес 8 и 9. Угол наклона грузовой платт формы в направлении замкнутой тяговой ручки при этам составляет 5-10 . Длина рабочей поверхности гусеницы 7 выполнена из условий захвата по крайней мере трех ступенек лестницы.
Шарнирная ось 11, соединяющая грузовую платформу 2 с рамой 1, размещена вблизи центра тяжести грузовой платформы.
Опорные ролики 15, сопряженные с нижней прямолинейной частью бесконечж «.... ..,.........-..-
ной ленты (гусеницы), выполнены диа- метром, меньшим по величине диаметра
ной ленты (гусеницы), выполнены диа- метром, меньшим по величине диаметра
колес 13 и 14, на которые j надета бесконечная лента. Диаметр опорных роликов выбран из соотношения dp (0,4-0,5)D, где dp - диаметр опорных роликов, - диаметр шкивов. Шаг расположения опорных роликов составляет мм.
Шкивы 13 и 14 и опорные ролики 15
снабжены канавками, поверхность кото- рых сопряжена с бесконечной лентой 12. Бесконечная лента 12 выполнена сечением, соответствующим форме ка- навки на шкивах и опорных роликах, например
превышающей глубину канавок, из материала, например, резины или резино- ткани.
Копирный паз в копирной планке 18 вьшолнен радиусом обратной кривизны,
равным половине радиуса качания тал- кателя 17 плеча двуплечего рычага 4 в угловом секторе, выбранном из максимально возможного отклонения рельеобслуживания тележки.
Устройство работает следующим образом.
При перемещении тележки по ровной поверхности на ходовых колесах (фиг.1) опорная поверхность ходовых колес 8 и 9 ниже опорной поверхности гусениц 7, тележка опирается и ка, .
™-я на колесах. При этом штифт 2
™-я на колесах. При этом штифт 2
под воздействием пружины 27 входит в отверстие 23 кругового сектора 22 и стопорит грузовую .платформу с гру- 3QM и с рамой в горизонтальном положении. В силу того, что колеса расположены симметрично относительно центра тяжести груза, нагрузка распределяется на ходовые колеса равномерно, на ручку вес груза не переносится, и ее можно поворачивать. Размещение передних колес 8 на поворотных вилках 21 облегчает управление тележкой.
При перемещении тележки по горизонтальной поверхности на гусеницах, например по песку, снегу, мягкому грунту, замкнутую тяговую ручку 6 поворачивают вниз, предварительно нажав рукоятку 29 управления и расстопорив грузовую платформу. Нажимая рукоятку 29 управления и перемещая ее вверх, воздействуют на тросик, который выводит штифт 26 из отверстия 23.
При повороте замкнутой тяговой ручки 6 вниз она воздействует через соединительную тягу 5 на грузовую платформу 2, платформа поворачивается по часовой стрелке относительно горизонтальной оси I1, при этом передние колеса 8 заходят внутрь рамы 1. Другой конец двуплечего рычага 4 при повороте грузовой платформы 2 от ручки 6 воздействует через копир-толкатель 17 на копирную планку 18, посредством криволинейной копирной по-: верхности поворачивает копирную план30 Аналогично осуществляется т спортировка груза в обратном н лении, вверх по лестнице. Отли состоит лигоь в том, что тележк отстопоренной грузовой платфор
ку против вращения часовой стрелки,и
убираются внутрь задние колеса. Тележ- ц тащат за тяговую ручку вверх.
ка опускается на гусеницы 7, при этом
599626
БОЙ платформы, которая находится в горизонтальном положении. Поворот рамы против часовой стрелки вызывает подъем передних и задних ходовых колес и опускание тележки на гусеницы, если она до этого перемещалась на ходовых колесах. Вес груза на ручку не переносится, грузовая платфор10 ма находится в горизонтальном положении, а фиксатор 26 своим торцом скользит по плоскости сектора 22.
При переходе с лестничных маршей на горизонтальную лестничную площадку
15 рама совместно с гусеницами поворачивается по часовой стрелке относительно оси 1I при стабилизированном го- ризонтал лом положении платформы. При этом передние колеса выдвигают20 ся за пределы опорной поверхности гусениц, одновременно задние колеса за счет воздействия толкателя на копир- ную планку, закрепленную на общей с вилкой колес оси, поворачиваясь
25 по часовой стрелке, выводятся за пределы гусеницы. Тележка переводится на ходовые колеса, автоматически срабатывает фиксатор и замыкает раму с кронштейном платформы.
30 Аналогично осуществляется транспортировка груза в обратном найрав- лении, вверх по лестнице. Отличие состоит лигоь в том, что тележку с отстопоренной грузовой платформой
| название | год | авторы | номер документа |
|---|---|---|---|
| СКЛАДНАЯ РУЧНАЯ ТЕЛЕЖКА | 1999 |
|
RU2149786C1 |
| Гусенично-колесный ход | 1989 |
|
SU1676916A1 |
| Устройство для сцепления с рельсом железнодорожной техники (варианты) | 2024 |
|
RU2836497C1 |
| Тележка для подъема по лестнице | 1973 |
|
SU673164A3 |
| Тележечный конвейер | 1983 |
|
SU1131782A1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| Вертикально-замкнутый накопительный конвейер | 1985 |
|
SU1399230A1 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |
| ТРАНСПОРТАБЕЛЬНЫЙ БОРТОВОЙ ПОДЪЁМНИК | 2015 |
|
RU2602269C2 |
| Комбинированный движитель транспортного средства | 1980 |
|
SU918162A1 |

Изобретение относится к транспортному машиностроению, в частности к безрельсовым транспортным колесно- гусеничным тележкам для перемещения по горизонтальной поверхности и лестничным маршам. Цель изобретения - улучшение управляемости тележки и условий транспортировки. Она содержит грузовую платформу, соединенную с рамой, расположенные по сторонам рамы гусеницы и колеса, механизм стабилизации положения грузовой платформы, выполненный в виде многозвенного шарнирного механизма и фиксатора, . включающего замкнутую тяговую ручку, соединительную тягу, грузовую платформу и ходовые колеса. Грузовая платформа снабжена кронштейнами, посредством которых шарнирно соединена с рамой. Кронштейны скреплены с двуплечими рычагами,одними концами жестко соединенными с мостом передних колес, а другими посредством закрепленных на нем копир-толкателя и копирной планки - с криволинейной копирной поверхностью. Последняя сопряжена с копир- толкателем, соединенным с вилками задних колес, размещенных на общей с копирной планкой оси, установлен-- ной на раме с возможностью вращения, причем передние колеса установлены в поворотных вилках, а фиксатор положения выполнен в виде двух круговых секторов с отверстиями, закрепленных на раме корпуса фиксатора, закрепленного на кронштейнах грузовой платфор-- мы, и подпружиненного цилиндрического штифта, соединенного гибким тросом с рукояткой управления, при этом гусеничная лента снабжена опорными вра-, щающимися роликами, установленными в боковинах рамы. 5 ил. а С 4ii Qсе ее а N
корпус 25 фиксатора становится напротив .отверстия 24, и щтифт 26 под воздействием пружины заходит в отверстие и стопорит грузовую платформу с рамой в горизонтальном положении с отклонением не более 5-10 . Воздействием на замкнутую тяговую ручку толкают или тянут тележку.
При переходе с горизонтального участка на лестничные марши, например при спуске, рукоятку 29 управления отводят вверх, тросик 23 воздействует на щтифт 26, который, сжимая пружину
27, выходит из фиксирующего отверстия gQ кнутую тяговую ручку, соединителькругового сектора рамы и расстопари- вает грузовую площадку с рамой, при этом рама тележки совместно с гусеницами под собственным весом, когда центр ее тяжести перейдет буртик ступени лестницы, поворачивается относительно оси 11 и грузовой платформы против часовой стрелки. Поворот рамы происходит относительно грузо
Формула изобретения.
Транспортная тележка, содержащая грузовую платформу, соединенную с рамой, расположенные по сторонам рамы гусеницы и колеса, о т л и ч а ю- щ а я с я тем, что, с целью улучще- ния управляемости тележки и условий транспортировки, тележка снабжена механизмом стабилизации положения грузовой платформы, выполненным в виде многозвенного шарнирного механизма и фиксатора, включающего замную тягу, грузовую платформу и ходовые колеса, при этом грузовая плат- .форма снабжена кронштейнами, посредством которых шарнирно соединена с 55 рамой, а кронштейны скреплены с двуплечими рычагами, одними концами жестко соединенными с мостом передних колес, а другими посредством -закрепленного на нем копира-толкателя и
13
IS 21 в if 3 П 1 18 20 19 9 14 13
Фиг.1
29
13
CVf
6 28
vXy
/ .З
/4/4
vXy
/ / 5
29
ФигЛ
См
ч
15
t
го
V. г xi///y / J
Ж
C4J ем
Ч
7 ///////,
«а / сч
Y/////////////.
| Тележка для подъема по лестнице | 1973 |
|
SU673164A3 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
