Область техники
Настоящее изобретение относится к устройству для катетерного анатомического картрирования пищевода во время электрофизиологической процедуры абляции, а конкретно устройство помещается в пищевод через горло или через нос, чтобы во время абляции получать данные по расположению и ориентации пищевода.
Уровень техники
В процедурах электрофизиологической абляции используются источники энергии, например радиочастотная энергия, чтобы удалять ткани для коррекции или предотвращения аритмии, например, сильной желудочковой тахикардии, пароксизмальной сердечной тахикардии или мерцательной аритмии. Некоторые процедуры требуют применения рядом с пищеводом вводимых с помощью катетера источников энергии, что создает риск повреждения пищевода, в том числе появления свища пищевода. Из-за близости пищевода к сердечной полости врачам при проведении процедур сердечной абляции очень важно знать местоположение пищевода, чтобы свести к минимуму риск появления свища пищевода.
Свищ пищевода, связанный с абляцией, используемой для лечения мерцательной аритмии, приводил к высокому уровню смертности. Существует потребность в устройстве или способе, уменьшающем или исключающем риск возникновения свища пищевода за счет появления у электрофизиолога возможности избежать повреждения пищевода используемым для абляции источником энергии.
Системы электроанатомического картрирования дают врачу возможность создавать подробные электроанатомические карты сердца с помощью трехмерных изображений сердца. Указанные системы используются для точного подведения абляционных катетеров к различным интересующим врача участкам сердца и могут использоваться для сокращения времени процедуры и рентгеноскопии. Одной из таких электроанатомических систем картрирования является система Carto, выпускаемая компанией Biosense Webster. Подобные системы, где для получения трехмерной информации о местоположении с помощью катетера, описаны в патенте США №5546951 под названием «Способ и устройство для изучения сердечных аритмий», патенте США №6368285 под названием «Способ и устройство для картрирования полости сердца» и патенте США №6650927 под названием «Получение диагностических данных отображения на трехмерной карте», приведенных здесь для справки.
Кроме того, известен патент США №5738096, который также приводится здесь в качестве ссылки, раскрывающий способы геометрического картрирования внутренней оболочки сердца, основанном на контакте зонда с множественными точками на сердечной перегородке и определения координат положения зонда в каждой такой точке. Координаты положения в совокупности формируют карту по меньшей мере части сердца. Как только положение катетера становится известным, чтобы определить местные физиологические характеристики сердечных тканей, смежных с концом катетера, могут использоваться внешние датчики.
Дополнительные способы создания трехмерной карты сердца, основанные на указанных данных, раскрываются, например, в патенте США №6226542, приводимом здесь в качестве ссылки и принадлежащем заявителю данной патентной заявки. Координаты положения (а также, как вариант, электрическая активность) первоначально измеряются примерно в 10-20 точках на внутренней поверхности сердца. Указанных точек с данными в общем случае достаточно, чтобы с удовлетворительным качеством создать предварительную модель или карту сердечной поверхности. Предварительная карта преимущественно комбинируется с данными, полученными в дополнительных точках, чтобы получить более точную карту.
Сущность изобретения
Настоящее изобретение в основном относится к решению указанных выше проблем с помощью катетера, чтобы дать врачу возможность регистрировать и отображать местоположение пищевода с помощью электроанатомической системы картрирования, например системы Biosense Webster CARTO™. Информация о положении пищевода будет давать возможность врачу выполнять радиочастотную абляцию в левом предсердии, например, когда пищевод не находится в непосредственной близости к участкам абляции, уменьшая риск близкого подвода энергии к пищеводу, следовательно, снижая риск появления свища пищевода.
Поставленные задачи решаются при помощи катетера для картрирования пищевода для получения анатомической информации в целях картрирования относительно положения пищевода пациента для электроанатомической системы картрирования, который согласно изобретению содержит:
по существу трубчатый стержень, имеющий проксимальный конец, дистальный конец и полость, при этом стержень снабжен внешней маркировкой с расположенными с равными интервалами численными и линейными маркерами, начинающимися на расстоянии от дистального конца и указывающими по существу равные отрезки стержня;
датчик местоположения, размещенный в полости у дистального конца стержня;
ручку, находящуюся у проксимального конца стержня;
по меньшей мере один электрический проводник между датчиком местоположения и ручкой, причем указанный проводник размещен в полости стержня; и
размещенные в полости ручки печатную плату, содержащую электронную схему для преобразования электрических сигналов от датчика местоположения из аналоговой в цифровую форму, и связанный с ней микропроцессор для хранения и обработки данных, собираемых датчиком местоположения;
при этом ручка снабжена электрическим разъемом для соединения через кабель с интерфейсным блоком пользователя.
Предпочтительно датчик местоположения зафиксирован внутри дистального конца стержня атравматическим куполом, при этом атравматический купол выполнен из полиуретана. Катетер может дополнительно содержать проводник для соединения ручки с электроанатомической системой картрирования, а также датчик температуры, размещенный рядом с датчиком местоположения у дистального конца трубчатого элемента, для измерения температуры внутри пищевода. Предпочтительно датчик местоположения выполнен в виде трех спиралей для предоставления информации о трехмерном положении, когда указанные спирали помещены в известное магнитное поле. Печатная плата предварительной обработки данных по существу окружена экраном. В этом варианте стержень покрыт смазочным материалом, причем в качестве смазочного материала используется политетрафторэтилен. Предпочтительно смазочный материал является гидрофильным. Катетер согласно изобретению может дополнительно содержать тонкий зонд, приспособленный для вставления у проксимального конца стержня и имеющий длину по существу равную длине стержня для обеспечения жесткости при введении катетера в тело.
В другом аспекте катетер для картрирования пищевода для получения анатомической информации картрирования относительно положения пищевода пациента для электроанатомической системы картрирования содержит:
по существу трубчатый стержень, имеющий проксимальный конец, дистальный конец и полость;
датчик местоположения, размещенный в полости у дистального конца стержня; при этом стержень снабжен внешней маркировкой с расположенными с равными интервалами численными и линейными маркерами, начинающимися на расстоянии от дистального конца и указывающими по существу равные отрезки стержня;
ручку, находящуюся у проксимального конца стержня;
по меньшей мере один электрический проводник между датчиком местоположения и ручкой, причем указанный проводник расположен в полости стержня;
размещенные в полости ручки печатную плату, содержащую электронную схему для преобразования электрических сигналов от датчика местоположения из аналоговой в цифровую форму, и связанный с ней микропроцессор для хранения и обработки данных, собираемых датчиком местоположения; и
средства фиксации датчика местоположения в дистальном конце стержня;
при этом ручка снабжена электрическим разъемом для соединения через кабель с интерфейсным блоком пользователя.
При этом средства фиксации датчика местоположения в дистальном конце стержня представляют собой атравматический купол, причем атравматический купол выполнен из полиуретана.
Катетер для картрирования пищевода по настоящему изобретению содержит гибкое трубчатое устройство с датчиком местоположения и термопарами, находящимися на верхнем конце устройства. Устройство вводится в пищевод через горло или носовой проход и выравнивается за сердцем с использованием рентгеновского контроля направления. Перед выполнением абляции на левом предсердии врач регистрирует точки данных местоположения внутри пищевода, перемещая устройство по пищеводу вверх-вниз, при этом регистрируя информацию о местоположении катетера, поступающую от датчика местоположения, и идентифицируя точки местоположения. Точки предназначены для регистрации положения конца устройства внутри пищевода, они, в свою очередь, фиксируют положение пищевода относительно левого предсердия на электроанатомической карте. Точки пищевода, отражаемые на электроанатомической карте, дают возможность врачу направлять радиочастотную энергию в сторону от пищевода, тем самым уменьшая риск появления свища пищевода.
Кроме того, устройство внутри пищевода можно размещать за левым предсердием, когда осуществляется подача радиочастотной энергии, чтобы измерять температуру пищевода. Изменение температуры пищевода при абляции дает возможность врачу иметь обратную связь с процессом абляции, что предотвращает термическое повреждение пищевода.
Размещение катетера в пищеводе может направляться с использованием рентгеновских лучей, чтобы обеспечить выравнивание радионепроницаемого катетера у задней стенки левого предсердия. Устройство может покрываться смазочным материалом для облегчения его введения внутрь пищевода и манипулирования им внутри пищевода.
В настоящем изобретении предлагается гибкое устройство для введения в пищевод, снабженное возможностью фиксирования положения пищевода относительно участка абляции при проведении процедуры электрофизиологической абляции. Информация о местоположении пищевода дает возможность врачу осуществлять абляцию в направлении от пищевода, что уменьшает риск появления свища пищевода. Информация о температуре может позволить врачу контролировать подачу энергии при абляции, чтобы предотвратить тепловое повреждение пищевода.
Краткое описание чертежей
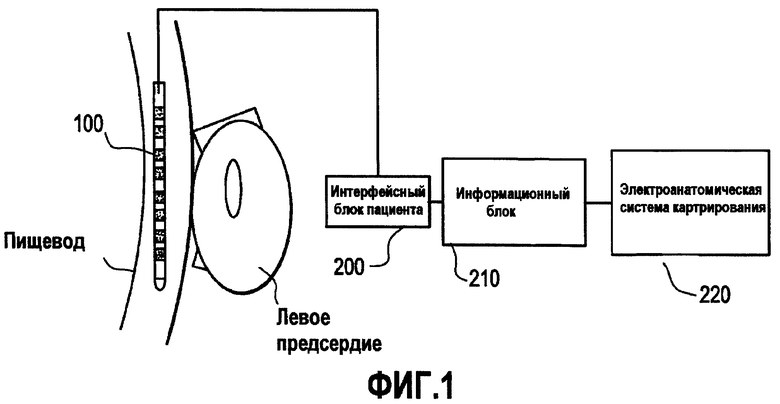
Фиг.1 - блок-схема размещения катетера для картрирования пищевода по настоящему изобретению, связанного с электроанатомической системой картрирования.
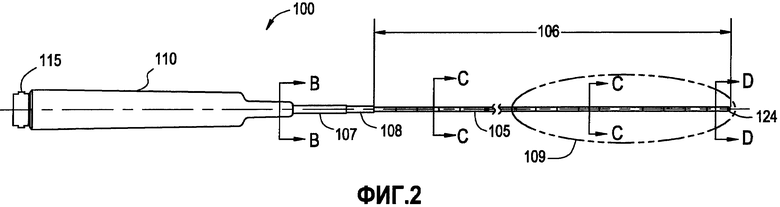
Фиг.2 - увеличенный вид варианта осуществления катетера для картрирования пищевода по настоящему изобретению.
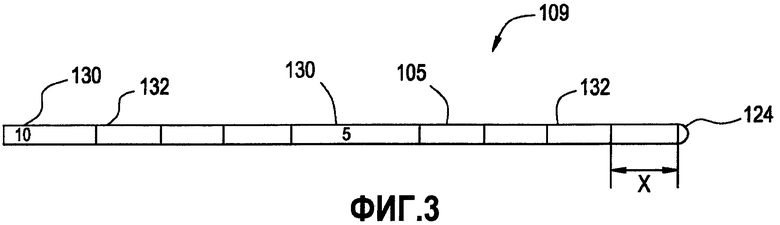
Фиг.3 - увеличенный вид дистальной части катетера для картрирования пищевода, изображенного на фиг.2 по настоящему изобретению.
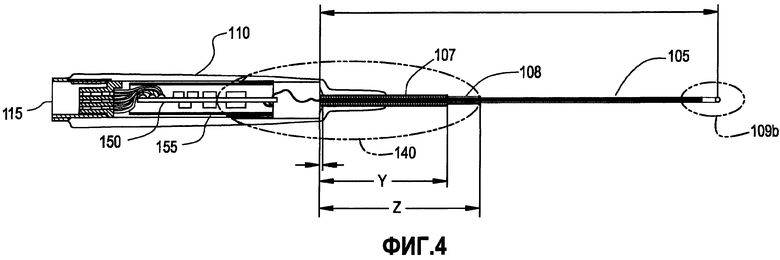
Фиг.4 - продольный разрез катетера для картрирования пищевода, изображенного на фиг.2 по настоящему изобретению.
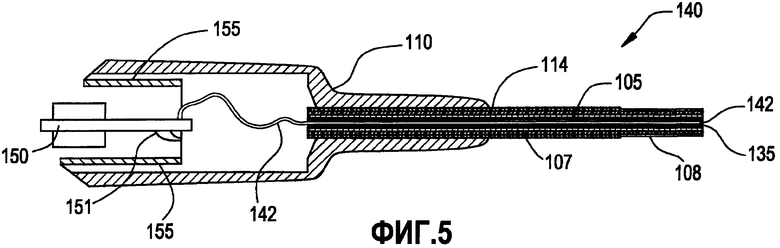
Фиг.5 - продольный разрез перехода между стержнем и ручкой катетера для картрирования пищевода, изображенного на фиг.2 по настоящему изобретению.
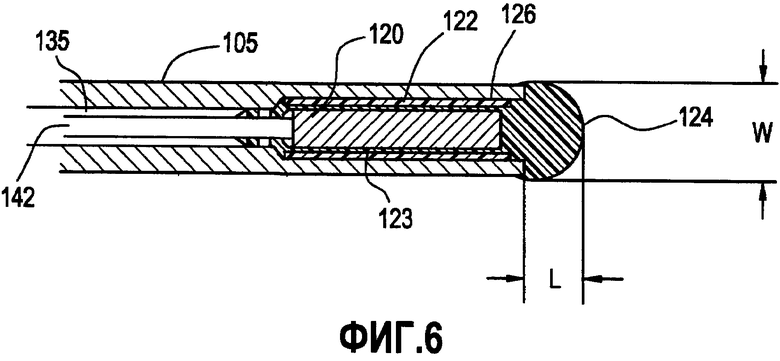
Фиг.6 - продольное сечение дистального конца катетера для картрирования пищевода, изображенного на фиг.2 по настоящему изобретению.
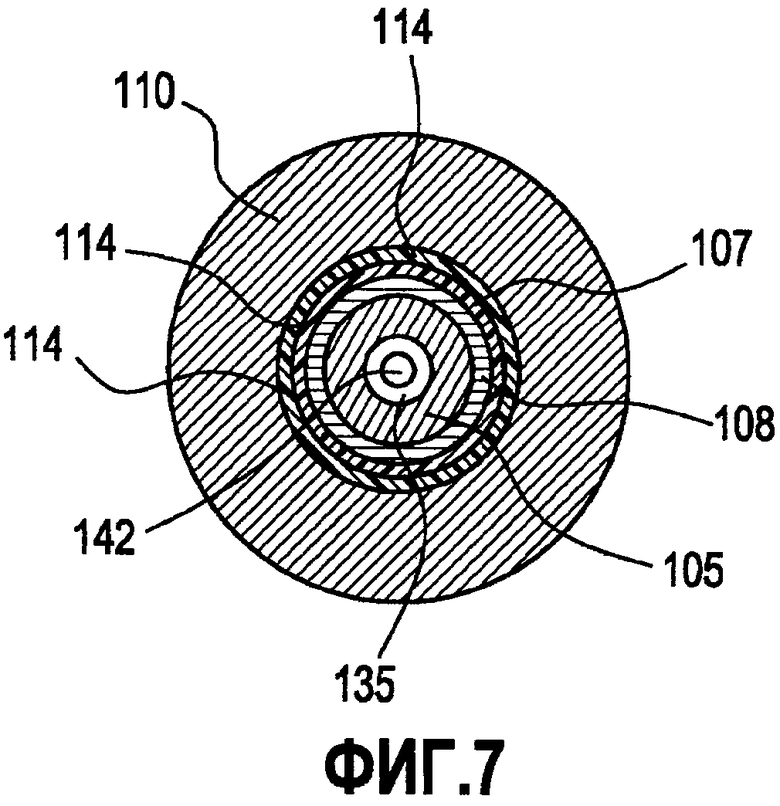
Фиг.7 - поперечное сечение по линии В-В катетера для картрирования пищевода, изображенного на фиг.2.
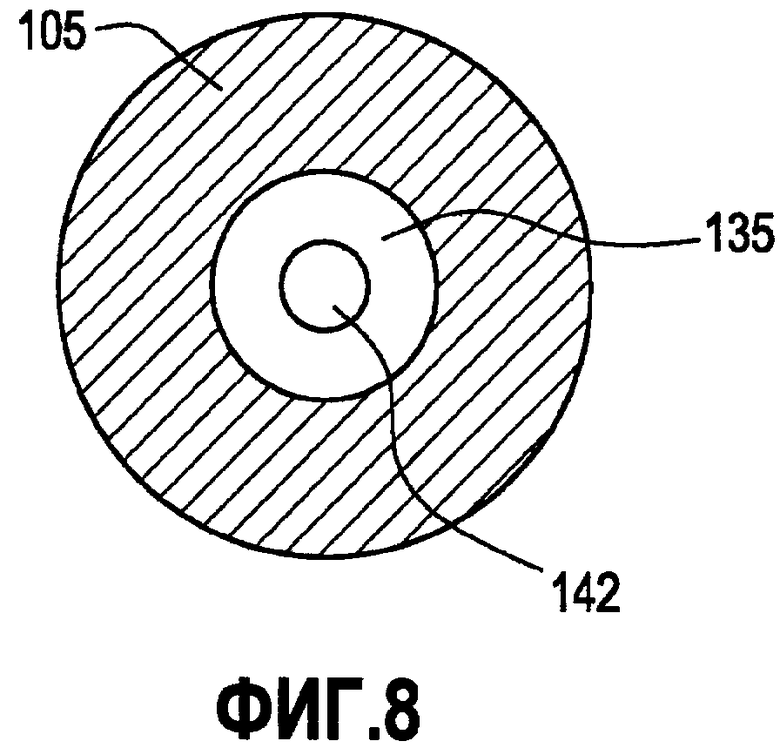
Фиг.8 - поперечное сечение по линии С-С катетера для картрирования пищевода, изображенного на фиг.2.
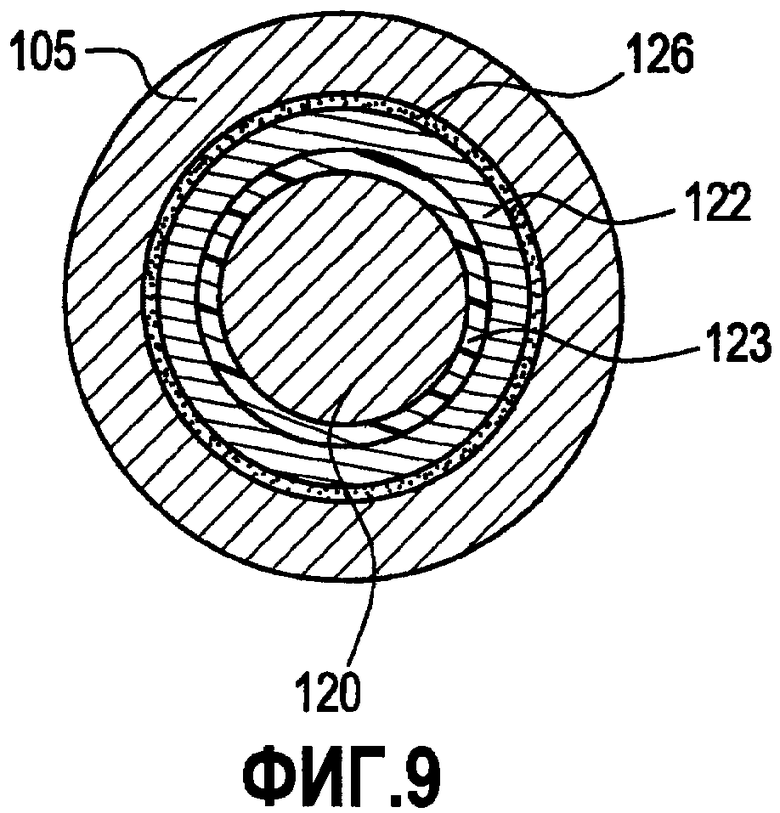
Фиг.9 - поперечное сечение по линии D-D катетера для картрирования пищевода, изображенного на фиг.2.
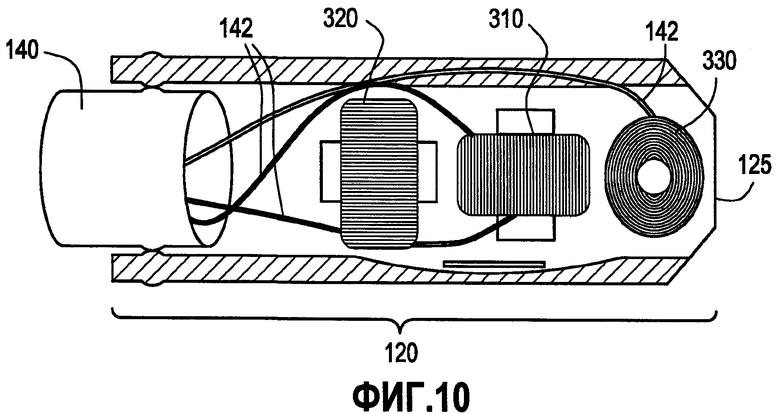
Фиг.10 - схема, изображающая элементы датчика местоположения, используемого в катетере для картрирования пищевода по настоящему изобретению.
Варианты осуществления изобретения
Фиг.1 - это блок-схема размещения катетера 100 для картрирования пищевода в пищеводе рядом с левым предсердием пациента. Катетер 100 для картрирования пищевода электрически соединен с интерфейсным блоком пациента (PIU-ИБП) 200, связанным с коммуникационным блоком (СОМ unit-КБ) 210, который, в свою очередь, связан с электроанатомической системой картрирования (ЭСК) 220. Таким образом, электрические сигналы от катетера 100 для картрирования пищевода принимаются и обрабатываются ЭСК 220, что будет описано ниже.
Близкое анатомическое взаимодействие задней стенки левого предсердия сердца и термочувствительного пищевода создают потенциальную опасность при проведении катетерных процедур абляции. Катетер 100 для картрирования пищевода вводится в пищевод через нос или горло пациента. Как только устройство достигает желаемого положения, датчик местоположения применяется для определения трехмерного положения в полости пищевода, используя программное обеспечение для определения местоположения, реализуемое системой аппаратного обеспечения, являющейся частью ЭСК 220, поскольку устройство медленно подтягивается к точке начального ввода.
Катетер 100 для картрирования пищевода содержит стержень 105, преимущественно представляющий собой трубку из радионепроницаемого полиуретана пеллетана, имеющего рабочую длину 106, составляющую примерно 125 см, герметизированную атравматическим наконечником из полиуретанового купола 124, защищающего датчик местоположения 120 у дистального конца и закрытого ручкой 110 у проксимального конца (фиг.2 и 3). Материалы катетера обладают достаточной жесткостью, чтобы обеспечивать его размещение, но они недостаточно жестки, чтобы стать причиной механического повреждения тканей, с которыми контактируют при вводе катетера в пищевод и его использовании. Хотя пеллетан является предпочтительным материалом для стержня 105, могут применяться и другие материалы, например силикон или иные полиуретановые вещества, совместимые со средой пищевода. Катетер 100 является достаточно радионепроницаемым, чтобы определенно идентифицироваться при рентгеноскопической визуализации. Числовые дистанционные маркеры 130 на стержне 105 отмечают расстояние в сантиметрах от дистального конца катетера, начиная с 5 см с шагом 5 см до примерно 120 см на дистальном конце. Указанные маркеры помогают врачу определять, находится ли катетер 100 для картрирования пищевода в желаемом положении внутри пищевода пациента. Катетер 100 изготавливается из материалов, совместимых со средой пищевода. Стержень 105 катетера в общем случае не изгибается, он должен иметь достаточную длину, чтобы обеспечивать позиционирование конца катетера в пищеводе ниже уровня сердца.
У проксимального конца катетера находится ручка 110 с электрическим разъемом 115, соединяющимся с ИБП 200 через кабель интерфейса (не показан). Полая ручка или полость ручки 110 содержит печатную плату и связанный с ней микропроцессор для хранения и предварительной обработки данных, собираемых датчиком местоположения 120. Кабель интерфейса представляет собой стандартный кабель, заканчивающийся на обоих концах многоштырьковыми разъемами, например, подобными используемым с катетером Biosense Navistar®. Кабель интерфейса подсоединен к ИБП 200 электроанатомической системы картрирования, что дает возможность врачу регистрировать положение или ориентацию конца катетера внутри пищевода.
На фиг.3 подробнее показана дистальная часть 109 катетера 100 с числовыми маркерами 130 и линейными маркерами 132 стержня 105. Линейные маркеры начинаются с расстояния примерно 10 мм от полиуретанового купола 124 и располагаются друг от друга примерно на расстоянии 10 мм (расстояние X) от дистального конца. Возле проксимального конца катетера 100, рядом с дистальным концом ручки 110 стержня 105, находятся втулки 107 и 108, изготовленные из термоусадочных материалов и предназначенные для обеспечения сопряжения со стержнем 105 сохранения жидкостей, поступающих с внутренней части ручки 110. Втулки 107 и 108 предпочтительно изготавливаются из полиолефина, но могут также использоваться любые гибкие пластики, служащие для снятия напряжений.
Фиг.4-6 - это продольные поперечные сечения катетера 100 с подузлами 150 печатных плат, главным образом окруженные многочисленными узлами экранирования 155. Электрические проводники 142 соединены (посредством мягкой, твердой пайки или другим электрическим соединением 151) с электронной схемой подузла 150 печатной платы, который содержит электронную схему, необходимую для преобразования электрических сигналов от датчика местоположения 120 из аналогового формата в цифровой для получения формата данных, совместимого с форматом ожидаемым КБ 210, поскольку данные посылаются анатомической системе картрирования 220. Электрические проводники 142 проходят через центральную полость 135 стержня 105 и своими дистальными концами соединяются с датчиком местоположения 120.
Как видно из фиг.5, являющейся увеличенным видом области перехода 140, перехода от стержня 105 к полости ручки 110, переходные втулки 107 и 108 у сопряжения с полостью ручки герметизируются полиуретановым клеем 114, который может быть аналогичным полиуретану, используемому на дистальном конце 124. Втулка 107 имеет длину около 5 см, а втулка 108 - около 6,5 см. Могут использоваться другие втулочные варианты, или же альтернативный стержень 105 может заканчиваться внутри полости ручки 105 и крепиться внутри полости ручки полиуретановым или другим типом клея без применения промежуточных втулок 107 и 108.
Фиг.6 - это увеличенный вид дистальной конечной части 109b катетера 100, изображенного на фиг.4. Стержень 105 имеет центральную полость 135, где находятся электрические проводники 142, которые своими дистальными концами соединены с датчиком местоположения 120. Датчик местоположения 120 располагается внутри нейлоно-зайтеловой трубки 122, удерживаемой на месте внутри стержня 105 слоем полиуретанового клея 126, или другого типа клея, или связующего вещества. Датчик местоположения 120 удерживается на месте внутри трубки 122 окружным слоем полиуретана 123, который закрывается полиуретановым куполом 124. Полиуретановый купол 124 в диаметре имеет размер примерно 2,54-3,05 мм в самой широкой части (W) и примерно длину (L) 1,27-1,78 мм.
Фиг.7 - это поперечное сечение катетера для картрирования пищевода по изобретению по линии В-В на фиг.2. Между втулками 107 и 108 и стержнем 105 помимо слоя полиуретана у перехода между полостью 110 и втулкой 107 могут применяться слои полиуретана 114.
На фиг.8 показано поперечное сечение катетера для картрирования пищевода, изображенного на фиг.2, по линии С-С в зоне стержня и прохождение электрических проводников 142 через центральную полость 135 стержня 105.
Фиг.9 - это поперечное сечение катетера для картрирования пищевода, изображенного на фиг.2, по линии D-D у дистального конца устройства. Отслеживание положения обеспечивается датчиком местоположения 120, находящегося у дистального конца катетера 100 для картрирования пищевода, и внешним магнитным полем (не показано). Датчик местоположения 120 определяет положение конца катетера (координаты x, y, z), а также его ориентацию (наклон, вращение и угловой поворот), то есть дает информацию, которая обрабатывается и отражается ЭСК 220.
Одним из вариантов осуществления катетера 100 для картрирования пищевода является диаметральное изображение фиг.8 с рабочей длиной 106, равной 125 см, хотя могут применяться и другие диаметры и длины. Катетер имеет гибкий полиуретановый стержень 106 с атравматическим наконечником 124. Катетер 100 для картрирования пищевода снабжен магнитным датчиком местоположения 120, находящимся в дистальном конце, который выдает информацию ЭСК типа Carto™ EP Navigation System (навигационная система) и RefStar™ QwikPatch™ с External Reference Patch (внешняя эталонная накладка), выдающими информацию о местоположении, чтобы построить трехмерную электроанатомическую карту пищевода в режиме реального времени. Датчик местоположения 120 определяет положение конца катетера (координаты x, y, z), а также его ориентацию (поворот в горизонтальной плоскости, поворот в вертикальной плоскости и угол наклона), то есть дает информацию, которая обрабатывается и отражается ЭСК.
Катетер 100 для картрирования пищевода используется вместе с навигационным катетером, например, NaviStar® Mapping and Ablation Catheter (катетер для картрирования и абляции), чтобы обеспечить дополнительной информацией для создания карт, формируемых с навигационным катетером и электроанатомической системой картрирования. Катетер 100 для картрирования пищевода предназначен для создания справочных точек пищевода на электроанатомической карте в дополнение к сердечным справочным точкам, создаваемым навигационным катетером.
Датчик местонахождения 120 для катетера 100 для картрирования пищевода аналогичен или идентичен датчикам местонахождения для известных навигационных катетеров типа NaviStar®. Датчик состоит из трех взаимно перпендикулярных миниатюрных спиралей 310, 320 и 330, изготовленных из медной проволоки диаметром 10 мкм, намотанной на ферритовые шайбы. Спираль 310 обеспечивает информацией относительно оси х, спираль 320 - относительно оси у, спираль 330 - относительно оси z. Ферритовые шайбы служат для увеличения чувствительности местного сигнала в спиралях датчика до попадания его в предварительный усилитель на печатной плате в ручке 110 катетера. Спирали 310, 320 и 330 через электрические проводники 142 соединены с электронной схемой в ручке 110. Спирали, входящие в датчик, находятся в эпоксидно-амидном корпусе 125, который располагается в дистальных концах катетера 100 для картрирования пищевода.
Чтобы учитывать движение пациента, местоположение катетера для картрирования определяется электроанатомической системой картрирования относительно местоположения внешней эталонной накладки на спине пациента. Во внешней эталонной накладке используется та же технология датчиков местоположения, что и в катетере для картрирования. Информация о местоположении, отображаемая на экране электроанатомической системы картрирования, описывает местоположение датчика картрирования в пространстве, при этом контролируются неуместные движения катетера для картирования относительно местоположения эталонного датчика.
Для преобразования данных, полученных от катетера 100 для картрирования пищевода и эталонной накладки, в трехмерную карту в электроанатомической системе картрирования используются два алгоритма, в том числе триангуляционный алгоритм и реконструкционный алгоритм, формирующие трехмерную карту.
Основной принцип алгоритма определения местоположения аналогичен принципу работы систем глобального позиционирования, разработанных военными США, которые в настоящее время получили широкое коммерческое использование для различного навигационного применения. Так, самолет может определить свое местоположение, зная расстояние до трех спутников, электроанатомическая система картрирования может определить положение катетера для картрирования, зная расстояние до трех спиралей в площадке местоположения. Каждая спираль датчика местоположения определяет напряженность магнитных полей, генерируемых каждой из трех спиралей площадки местоположения, позволяя фиксировать расстояние. Указанные расстояния определяют радиусы теоретических сфер вокруг каждой спирали площадки местоположения. Данная информация используется для расчета трех пространственных координат (X, Y и Z) и трех параметров ориентации (поворот в горизонтальной плоскости, поворот в вертикальной плоскости и угол наклона). После чего электроанатомическая система картрирования визуально отображает местоположение датчиков в пространстве.
Электроанатомическая система картрирования случайным образом регистрирует ряд точек. Карта формируется с использованием алгоритма, в качестве начальной формы выбирающего эллипсоид (наименьший, содержащий все зарегистрированные точки), сжимая его вокруг фиксированных зарегистрированных точек до тех пор, пока все точки не «сядут» на поверхность создаваемой модели.
Катетер 100 для картрирования пищевода при проведении процедуры радиочастотной абляции может также помещаться в пищеводе за левым предсердием, чтобы измерять температуру в пищеводе, тем самым наделяя врача обратной связью, чтобы предотвратить тепловое повреждение пищевода. Информацию о температуре дает тепловой датчик, расположенный вместе с магнитным датчиком местоположения в дистальном конце катетера 100 для картрирования пищевода. Могут применяться тепловые датчики любого известного типа, предпочтительно типа Т, изготовленные из константановой и медной проволоки.
Для реализации предлагаемой концепции могут быть применимы различные технологии трехмерной регистрации местоположения, например картрирование местоположения на основе импеданса. Катетер 100 для картрирования пищевода может изготавливаться так, что он будет иметь возможность изгибаться. Он также может быть без термопар или смазочного покрытия. Он может снабжаться воздушным или рамочным механизмом для центрирования устройства в пищеводе. Катетер 100 может оборудоваться электродными кольцами для регистрации электрограмм, поступающих из пищевода.
При использовании врачом или иным лицом устройство вводится в пищевод через горло или носовой проход и располагается за сердцем с помощью рентгеновского наведения. Перед выполнением абляции левого предсердия врач регистрирует точки данных местоположения в пищеводе, перемещая устройство в пищеводе вверх-вниз, фиксируя информацию о местоположении катетера, поступающую от датчика местоположения, идентифицируя точки положения. Указанные точки служат для определения положения конца устройства в пищеводе, что, в свою очередь, определяет на электроанатомической карте положение пищевода относительно левого предсердия. Точки пищевода, отображаемые на электроанатомической карте, дают возможность врачу направлять радиочастотную энергию в сторону от пищевода, уменьшая риск появления свища пищевода. Кроме того, при подаче радиочастотной энергии устройство может размещаться в пищеводе за левым предсердием, чтобы измерять температуру пищевода. Изменение температуры пищевода при абляции может обеспечить врача обратной связью, позволяющей предотвращать тепловое повреждение пищевода. Размещение катетера в пищеводе может направляться с использованием рентгеновских лучей, чтобы обеспечить выравнивание радионепрозрачного катетера вдоль задней стенки левого предсердия. Устройство может покрываться смазочным материалом, например политетрафторэтиленом или другим подобным материалом, чтобы облегчить введение устройства в пищевод и манипулирование им там. Для создания поверхности устройства, облегчающей его введение в пищевод, может также применяться гидрофильное покрытие. Информация о положении пищевода дает возможность врачу направлять абляцию в сторону от него, уменьшая риск появления свища пищевода. Информация о температуре может позволить врачу контролировать энергию, подаваемую во время абляции, чтобы предотвращать тепловое повреждение пищевода.
При введении устройства в пищевод и приложении силы сжатия следует избегать его искривления и скручивания, что может привести к невозможности продвижения устройства через носовой проход или горло. Жесткость устройства может обеспечиваться введением тонкого зонда в отверстие в полости ручки 110 через центральную полость 135 стержня 105 до дистального конца. Тонкий зонд может изготавливаться из любого материала, имеющего достаточную жесткость, обеспечивающую возможность проталкивания, например из нержавеющей стали или другого относительно недорогого, но химически неактивного материала. Как только устройство займет нужное место в пищеводе, тонкий зонд может быть удален, чтобы вернуть устройство в более гибкое состояние.
Предлагаемое устройство было описано выше со ссылками на существующие предпочтительные варианты настоящего изобретения. Специалисты в данной области техники и технологиях, к которым относится настоящее изобретение, поймут, что описанную конструкцию можно изменять и дорабатывать без значимого отступления от принципов, сущности и объемов настоящего изобретения.
Следовательно, вышеприведенное описание не следует считать единственно точной конструкцией, проиллюстрированной прилагаемыми чертежами, а лишь вспомогательным инструментом для приведенной ниже формулы изобретения, которая в наиболее полно и четко отражает объем и сущность настоящего изобретения.
Изобретение относится к медицинской диагностике и используется для получения анатомической информации в целях картрирования относительно положения пищевода пациента. Катетер содержит трубчатый стержень, имеющий проксимальный конец, дистальный конец и полость. Стержень снабжен внешней маркировкой с расположенными с равными интервалами численными и линейными маркерами, начинающимися на расстоянии от дистального конца и указывающими по существу равные отрезки стержня. Датчик местоположения размещен в полости у дистального конца стержня. Ручка находится у проксимального конца стержня. По меньшей мере один электрический проводник находится между датчиком местоположения и ручкой и размещен в полости стержня. Печатная плата содержит электронную схему для преобразования электрических сигналов от датчика местоположения из аналоговой в цифровую форму, с ней связан микропроцессор для хранения и обработки данных, собираемых датчиком местоположения. Ручка снабжена электрическим разъемом для соединения через кабель с интерфейсным блоком пользователя. Второй вариант катетера отличается выполнением средств фиксации датчика на дистальном конце стержня. Технический результат заключается в обеспечении регистрации и отображения местоположения пищевода. 2 н. и 12 з.п. ф-лы, 10 ил.
1. Катетер для картрирования пищевода для получения анатомической информации в целях картрирования относительно положения пищевода пациента для электроанатомической системы картрирования, содержащий:
по существу трубчатый стержень, имеющий проксимальный конец, дистальный конец и полость, при этом стержень снабжен внешней маркировкой с расположенными с равными интервалами численными и линейными маркерами, начинающимися на расстоянии от дистального конца и указывающими по существу равные отрезки стержня,
датчик местоположения, размещенный в полости у дистального конца стержня;
ручку, находящуюся у проксимального конца стержня;
по меньшей мере один электрический проводник между датчиком местоположения и ручкой, причем указанный проводник размещен в полости стержня; и
размещенные в полости ручки печатную плату, содержащую электронную схему для преобразования электрических сигналов от датчика местоположения из аналоговой в цифровую форму, и связанный с ней микропроцессор для хранения и обработки данных, собираемых датчиком местоположения,
при этом ручка снабжена электрическим разъемом для соединения через кабель с интерфейсным блоком пользователя.
2. Катетер по п.1, в котором датчик местоположения зафиксирован внутри дистального конца стержня атравматическим куполом.
3. Катетер по п.2, в котором атравматический купол выполнен из полиуретана.
4. Катетер по п.1, дополнительно содержащий проводник для соединения ручки с электроанатомической системой картрирования.
5. Катетер по п.1, дополнительно содержащий датчик температуры, размещенный рядом с датчиком местоположения у дистального конца трубчатого элемента, для измерения температуры внутри пищевода.
6. Катетер по п.1, в котором датчик местоположения выполнен в виде трех спиралей для предоставления информации о трехмерном положении, когда указанные спирали помещены в известное магнитное поле.
7. Катетер по п.1, в котором печатная плата предварительной обработки данных по существу окружена экраном.
8. Катетер по п.1, в котором стержень покрыт смазочным материалом.
9. Катетер по п.8, в котором в качестве смазочного материала используется политетрафторэтилен.
10. Катетер по п.8, в котором смазочный материал является гидрофильным.
11. Катетер по п.1, дополнительно содержащий тонкий зонд, приспособленный для вставления у проксимального конца стержня и имеющий длину по существу равную длине стержня для обеспечения жесткости при введении катетера в тело.
12. Катетер для картрирования пищевода для получения анатомической информации картрирования относительно положения пищевода пациента для электроанатомической системы картрирования, содержащий:
по существу трубчатый стержень, имеющий проксимальный конец, дистальный конец и полость;
датчик местоположения, размещенный в полости у дистального конца стержня; при этом стержень снабжен внешней маркировкой с расположенными с равными интервалами численными и линейными маркерами, начинающимися на расстоянии от дистального конца и указывающими по существу равные отрезки стержня;
ручку, находящуюся у проксимального конца стержня;
по меньшей мере, один электрический проводник между датчиком местоположения и ручкой, причем указанный проводник расположен в полости стержня;
размещенные в полости ручки печатную плату, содержащую электронную схему для преобразования электрических сигналов от датчика местоположения из аналоговой в цифровую форму, и связанный с ней микропроцессор для хранения и обработки данных, собираемых датчиком местоположения; и
средства фиксации датчика местоположения в дистальном конце стержня,
при этом ручка снабжена электрическим разъемом для соединения через кабель с интерфейсным блоком пользователя.
13. Катетер по п.12, в котором средства фиксации датчика местоположения в дистальном конце стержня представляют собой атравматический купол.
14. Катетер по п.12, в котором атравматический купол выполнен из полиуретана.
| US 2002165448 A1, 07.11.2002 | |||
| US 2002045810 A1, 18.04.2002 | |||
| Устройство для измерения силы тяги двигателя | 1984 |
|
SU1203383A1 |
| US 6266551 В1, 24.07.2001 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US 2002120178 A1, 29.08.2002 | |||
| US 2006030844 A1, 09.02.2006 | |||
| СПОСОБ КАРТИРОВАНИЯ ЛЕВОСТОРОННИХ ДОПОЛНИТЕЛЬНЫХ ПРОВОДЯЩИХ ПУТЕЙ | 2006 |
|
RU2350361C2 |

