Изобретение относится к области микроробототехники и может быть использовано в качестве рабочего органа микроманипулятора.
Известно вакуумное захватное устройство, содержащее источник вакуума и систему вакуумного присоса в виде пневмоприсоски. В качестве источника вакуума использован собственный источник вакуума, выполненный в виде пневматического пьезонасоса, состоящего из деформируемого элемента в виде силового пьезокристалла и эластичного элемента конструкции, который выполнен в виде цилиндра из эластичного материала. При этом в основной полости пневматического пьезонасоса установлены клапанные пьезоэлектрические механизмы в виде первого и второго клапанов, которые представляют собой первый и второй распределительные пьезокристаллы, расположенные между основной полостью пневматического пьезонасоса и соответственно внешней полостью пневматического пьезонасоса, то есть атмосферой, и полостью пневмоприсоски [патент РФ №2210493, МПК. B25J 15/06, B25J 7/00, опубл. 20.08.2003, б. №23].
Недостатком данного устройства является необходимость использования источника избыточного давления, что неоправданно усложняет всю конструкцию.
Известен также схват микроманипулятора, содержащий основу охвата, кисть охвата, упругодеформируемые зажимные пальцы, привод, выполненный в виде линейного электромагнитного двигателя, содержащего якорь из ферромагнитного материала и единственную систему обмоток электромагнита, тягу, выполненную в виде выдвижного звена с трубчатым концом, причем якорь линейного электродвигателя жестко соединяет основу схвата с кистью, к которой жестко закреплены зажимные пальцы, связанные между собой возвратной пружиной, а обмотка электромагнита установлена в выдвижном звене, расположенном коаксиально с якорем и кистью схвата [патент РФ №2259915, кл. B25J 7/00, опубл. 10.09.2005, б. №25].
Из основных недостатков данного устройства можно отметить конструктивную сложность, а также высокую вероятность электромагнитных наводок от электромагнитного двигателя на объекты микросреды.
Наиболее близким по технической сущности к заявляемому изобретению является наноструктурное захватное устройство микроманипулятора, содержащее основание, крепежное приспособление, рабочую поверхность захватного устройства, выполненную из наноструктурного материала, в основании равномерно установлены в сеточном порядке пьезоэлементы [патент РФ №2331505, кл. B25J 7/00, B25J 15/00, B82B 1/00, опубл. 20.08.2008, б. №23].
Существенным недостатком прототипа является конструктивная сложность и относительная сложность реализации операций выпускания микрообъектов. Кроме того, прототип обеспечивает возможность эффективной работы только с плоскими микрообъектами.
Задачей, на решение которой направлено заявляемое изобретение, является упрощение конструкции, а также расширение функциональных возможностей, связанное с более эффективным захватом и удержанием микрообъектов с выпуклыми и плоскими поверхностями.
Решение поставленной задачи достигается тем, что в наноструктурном захватном устройстве, содержащем основание, крепежное приспособление, рабочую поверхность из наноструктурного материала, в отличие от прототипа, основание выполнено из электропроводникового материала и изолировано от рабочей поверхности диэлектриком.
Наноструктурное захватное устройство для манипулирования микрообъектами, изготовленными из электропроводниковых материалов, может быть выполнено с рабочей поверхностью в форме вогнутой сферической поверхности.
На фиг.1 представлена конструкция наноструктурного захватного устройства (с рабочей поверхностью в форме вогнутой сферической поверхности); на фиг.2 - захват микрообъекта; на фиг.3 - выпускание микрообъекта.
Наноструктурное захватное устройство для манипулирования микрообъектами, изготовленными из электропроводниковых материалов микроманипулятора (фиг.1), содержит основание 1 из электропроводникового материала, крепежное приспособление 2, рабочую поверхность 3 захватного устройства из наноструктурного материала, слой диэлектрика 4.
Наноструктурное захватное устройство для манипулирования микрообъектами, изготовленными из электропроводниковых материалов, работает следующим образом.
В основу принципа действия устройства при реализации операций захвата и удержания микрообъектов заложены межмолекулярные силы Ван-дер-Ваальса (см. подробное описание теории в патенте РФ №2331505, кл. В25J 7/00, B25J 15/00, В82В 1/00, опубл. 20.08.2008, б. №23). При изготовлении поверхности рабочего органа для достижения максимальной гладкости и соответственно наибольших величин сил Ван-дер-Ваальса в заявляемом изобретении предлагается использование наноструктурных материалов. Важным преимуществом использования наноструктурных материалов по сравнению с их крупнокристаллическими аналогами является очень малый размер зерен (0,1 мкм и менее). Это позволит значительно снизить шероховатость, увеличить на несколько порядков силы Ван-дер-Ваальса, а также обеспечит более предсказуемый характер изменения эффективной силы удержания.
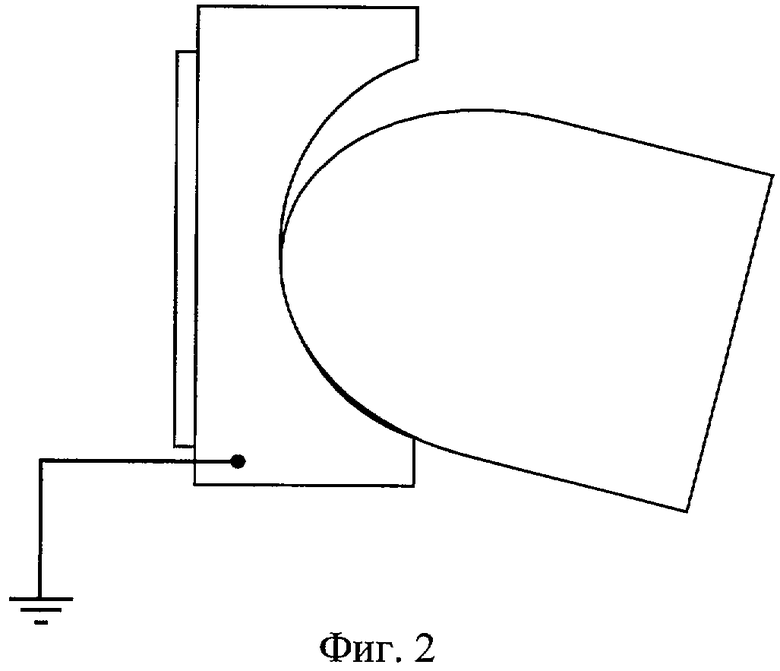
Для захвата и последующего удержания микрообъекта с помощью заявляемого изобретения необходимо обеспечить контакт рабочей поверхности 3 захватного устройства с поверхностью микрообъекта (фиг.2). В момент контакта микрообъект налипает на рабочую поверхность 3 захватного устройства и удерживается на ней под действием сил Ван-дер-Ваальса. Для нейтрализации остаточных зарядов основание 1 захватного устройства заземляется.
Для более эффективного удержания микрообъектов с выпуклыми формами рабочая поверхность захватного устройства изготавливается в форме вогнутой сферической поверхности. При работе с микрообъектами, имеющими плоские поверхности, рабочая поверхность захватного устройства также выполняется плоской.
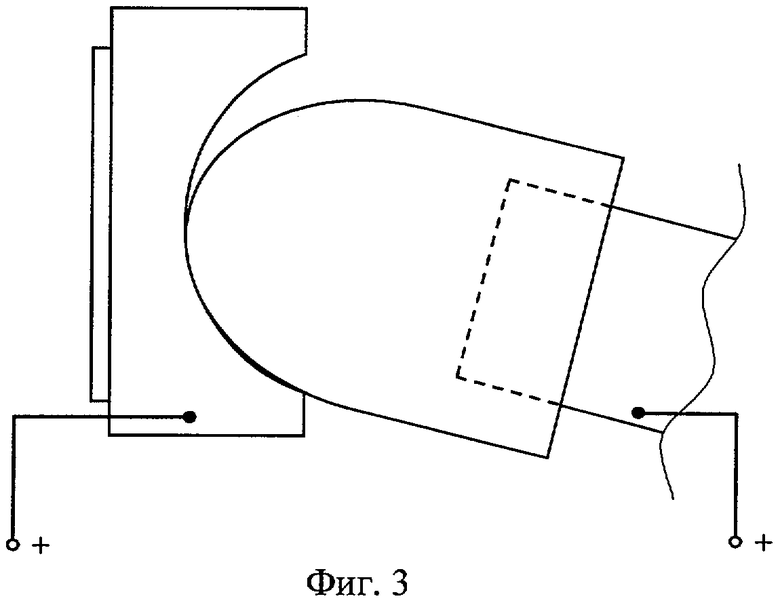
Для реализации операции выпускания используются силы электростатики. Предполагается, что микрообъекты изготовлены из электропроводниковых материалов. После переноса микрообъекта к целевой точке и выполнения некоторой сборочной операции по сопряжению микрообъекта с некоторой деталью (фиг.3) к детали подается положительный электрический потенциал. Одновременно положительный электрический потенциал подается на основание захватного устройства. Слой диэлектрика 4 не позволяет потенциалам микрообъекта и основания выравниваться, и между ними возникает электростатическое взаимодействие. В момент времени, когда величина электростатических сил отталкивания микрообъекта и основания захватного устройства превышает значение эффективных сил удержания (сил Ван-дер-Ваальса), микрообъект «отлипает» от рабочей поверхности захватного устройства и сохраняет свое положение в целевой точке.
Следует отметить, что заявляемое изобретение может быть использовано особенно эффективно при работе с микрообъектами, которые полностью или частично (поверхность) изготавливаются из наноструктурных металлических материалов. В этом случае будут наибольшие значения сил Ван-дер-Ваальса между поверхностями микрообъекта и рабочей поверхностью захватного устройства, что позволит при операциях микроманипулирования более надежно удерживать микрообъект.
Таким образом, заявляемое изобретение имеет простую конструкцию, в захватном устройстве более просто реализованы операции выпускания микрообъектов, а также расширены функциональные возможности по более эффективному захвату и удержанию микрообъектов с выпуклыми поверхностями.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАНОСТРУКТУРНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОМАНИПУЛЯТОРА | 2006 |
|
RU2331505C1 |
| КАПИЛЛЯРНЫЙ МИКРОЗАХВАТ С ОБРАТНОЙ СВЯЗЬЮ | 2004 |
|
RU2261795C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРОСХВАТ | 2009 |
|
RU2417876C1 |
| МАГНИТОСТРИКЦИОННЫЙ МИКРОСХВАТ | 2009 |
|
RU2417877C1 |
| БИМЕТАЛЛИЧЕСКИЙ МИКРОСХВАТ | 2009 |
|
RU2417878C1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРОСХВАТ | 2004 |
|
RU2266190C1 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОРОБОТА | 2005 |
|
RU2281197C1 |
| СХВАТ МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2259915C1 |
| АВТОНОМНОЕ ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОРОБОТА | 2004 |
|
RU2266810C1 |
Изобретение относится к области микроробототехники и может быть использовано в качестве рабочего органа микроманипулятора для манипулирования микрообъектами, изготовленными из элекропроводниковых материалов. Наноструктурное захватное устройство микроманипулятора содержит основание из электропроводникового материала, крепежное приспособление, рабочую поверхность захватного устройства из наноструктурного материала, слой диэлектрика. Изобретение позволяет упростить конструкцию, а также расширить функциональные возможности, связанные с более эффективным захватом и удержанием микрообъектов с выпуклыми и плоскими поверхностями. 1 з.п. ф-лы, 3 ил.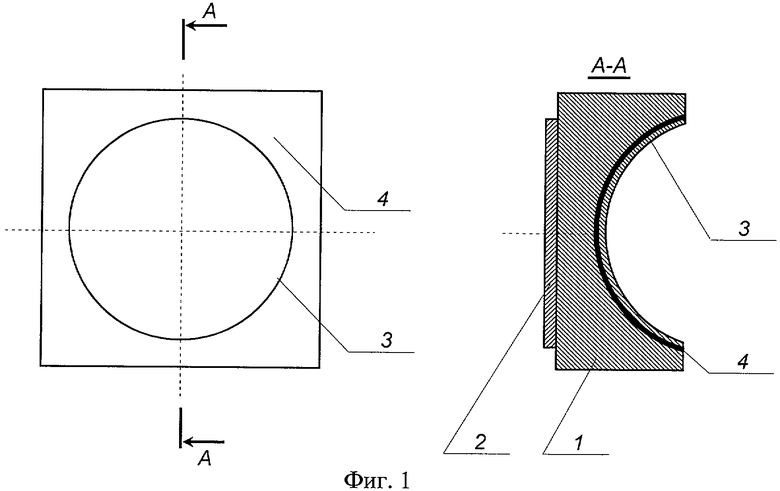
1. Наноструктурное захватное устройство для манипулирования микрообъектами, изготовленными из электропроводниковых материалов, содержащее основание, крепежное приспособление, рабочую поверхность из наноструктурного материала, отличающееся тем, что основание выполнено из электропроводникового материала и изолировано от рабочей поверхности диэлектриком.
2. Наноструктурное захватное устройство по п.1, отличающееся тем, что рабочая поверхность имеет форму вогнутой сферической поверхности.
| НАНОСТРУКТУРНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОМАНИПУЛЯТОРА | 2006 |
|
RU2331505C1 |
| КАПИЛЛЯРНЫЙ МИКРОЗАХВАТ С ОБРАТНОЙ СВЯЗЬЮ | 2004 |
|
RU2261795C1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

