Изобретение относится к области микроробототехники и может быть использовано в исполнительных устройствах роботов при сборке микроэлектромеханических систем (МЭМС).
Известен схват промышленного робота, используемый при изготовлении блоков электро- и радиоаппаратуры для установки радиоэлементов на печатную плату. Зажимные губки, имеющие возможность возвратно-поступательного перемещения, кинематически связаны между собой посредством зубчато-реечной передачи. Две зубчатые рейки передачи, на концах которых смонтированы губки, находятся в зацеплении с зубчатым колесом. По обе стороны от зубчатых реек попарно расположены цилиндрические катки, установленные группами по четыре катка на каждой оси. Каждая рейка имеет четыре направляющие для каждой группы катков. Две направляющие зубчатых реек для каждой группы катков взаимодействуют с парой ближайших к рейкам катков. Две оставшиеся направляющие взаимодействуют с другой парой катков и установлены диаметрально противоположно относительно упомянутой первой пары направляющих. Направляющие, взаимодействующие с ближайшими к рейкам катками, имеют реборды, контактирующие с боковыми сторонами катков. В результате обеспечивается уменьшение трения зубчатых реек в направляющих корпуса и захват деталей с допустимым усилием силового цилиндра [патент РФ №2149098, кл. B 25 J 15/00, 2000].
Недостатками данного устройства являются большое число механических передач и сложность конструкции, что приводит к большим габаритным, массовым характеристикам, а это, в свою очередь, не позволяет использовать данное устройство в системах манипулирования микророботов.
Известен также схват робота, содержащий корпус и губки, губки выполнены в виде баллона из эластичного тонкостенного материала и снабжены датчиками усилия зажима (захвата) объекта. Схват содержит корпус, губки, датчики с проводами, объект (предмет). Использование данного схвата позволяет контролировать величину усилия зажима (захвата) объекта [заявка на изобретение №94000972, RU, кл. B 25 J 15/00, 1995].
Недостатком данного устройства является необходимость использования внешнего источника избыточного давления. Кроме того, эластичный тонкостенный материал может быть легко поврежден при контакте с заостренными гранями микрообъектов.
Наиболее близким по технической сущности к заявляемому изобретению является пьзоэлектрический схват пьезоэлектрического манипулятора [патент РФ №2172239, кл. B 25 J 7/00, 2001]. Пьзоэлектрический схват содержит основу схвата, тяги и пьезоприводы, к основе схвата одним концом жестко прикреплен пьезопривод, а второй конец пьезопривода соединен с тягой при помощи скобы, соединение выполнено с возможностью скольжения тяги вдоль пьезопривода, и тяги прикреплены к основе схвата при помощи винта, причем пьезопривод выполнен в виде плоских пьезоэлектрических элементов.
У прототипа отсутствуют средства силового очувствления. Кроме того, зажимные пальцы данного устройства выполнены жесткими. Эти недостатки часто являются причинами случайных деформаций и разрушений структуры микрообъектов при их захвате.
Задачей, на решение которой направлено заявляемое изобретение, является улучшение эксплуатационных характеристик, связанное с силовым очувствлением микросхвата, снижением вероятности случайной деформации структуры микрообъектов и в то же время - с сохранением миниатюрности массогабаритных характеристик.
Решение поставленной задачи достигается тем, что в микросхвате с силовым очувствлением, содержащем двухсторонний возвратно-поступательный привод, основу схвата, верхний и нижний зажимные пальцы, в отличие от прототипа зажимные пальцы выполнены упругими, в виде монокристаллических пластин с пьезорезистивным чувствительным элементом и пьезорезистором на каждом.
Двухсторонний возвратно-поступательный привод может быть выполнен термомеханическим, либо магнитострикционным, либо электростатическим, либо электромагнитным, либо пьезоэлектрическим.
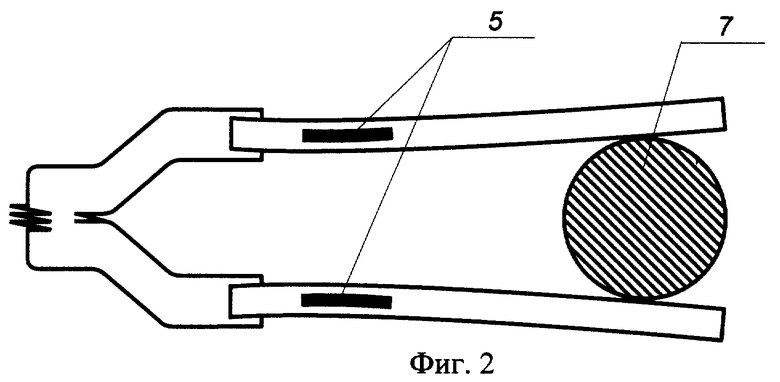
На фиг.1 представлена конструкция микросхвата с силовым очувствлением; на фиг.2 - захват сферического микрообъекта микросхватом с силовым очувствлением.
Микросхват с силовым очувствлением (фиг.1) содержит двухсторонний возвратно-поступательный привод 1, основу 2 схвата, верхний 3 и нижний 4 зажимные пальцы, выполненные в виде упругих монокристаллических пластин с пьезорезистивным чувствительным элементом 5 и пьезорезистором 6. Сферический микрообъект 7 (фиг.2) удерживается верхним 3 и нижним 4 зажимными пальцами.
Микросхват с силовым очувствлением работает следующим образом.
Двухсторонний возвратно-поступательный привод 1 (термомеханический, магнитострикционный, электростатический, электромагнитный или пьезоэлектрический) через основу 2 схвата приводит в движение верхний 3 и нижний 4 зажимные пальцы, тем самым микросхват раскрывается или закрывается. При захвате сферического микрообъекта 7 усилие, создаваемое двухсторонним возвратно-поступательным приводом 1, приводит к деформации изгиба верхнего 3 и нижнего 4 зажимных пальцев, выполненных в виде упругих монокристаллических пластин с пьезорезистивным чувствительным элементом 5 и пьезорезистором 6, которые включены по дифференциальной схеме. При этом пьезорезистивный чувствительный элемент 5 также деформируется под воздействием внешнего давления и изменяет свое электрическое сопротивление, а пьезорезистор 6, в свою очередь, не деформируется и не изменяет сопротивления. Дифференциальная схема включения снижает нелинейность пьезорезистивных характеристик чувствительного элемента 5 и пьезорезистора 6. Сигнал с дифференциальной схемы включения подается на внешнее электронное устройство, в котором формируются данные об усилии в верхнем 3 и нижнем 4 зажимных пальцах. Передача этих данных в систему автоматического управления позволяет обеспечивать контроль за операциями захвата, удержания и отпускания микрообъектов, исключая вероятность разрушений, поломок или деформаций как самого исполнительного устройства микроманипулятора, так и микрообъектов.
Итак, заявляемое изобретение позволяет провести улучшение эксплуатационных характеристик, связанное с силовым очувствлением микросхвата, снижением вероятности случайной деформации структуры микрообъектов и в то же время - с сохранением миниатюрности массогабаритных характеристик.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРОСХВАТ | 2004 |
|
RU2266190C1 |
| МАГНИТОСТРИКЦИОННЫЙ МИКРОСХВАТ | 2009 |
|
RU2417877C1 |
| СХВАТ МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2259915C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРОСХВАТ | 2009 |
|
RU2417876C1 |
| БИМЕТАЛЛИЧЕСКИЙ МИКРОСХВАТ | 2009 |
|
RU2417878C1 |
| КАПИЛЛЯРНЫЙ МИКРОЗАХВАТ С ОБРАТНОЙ СВЯЗЬЮ | 2004 |
|
RU2261795C1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ СХВАТ | 2013 |
|
RU2529126C1 |
| МЕХАТРОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ СХВАТ | 2010 |
|
RU2425747C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
Изобретение относится к микроробототехнике и может быть использовано в исполнительных устройствах роботов при сборке электромеханических систем. Микросхват содержит двухсторонний возвратно-поступательный привод, основу схвата, верхний и нижний зажимные пальцы. Зажимные пальцы выполнены упругими в виде монокристаллических пластин с пьезорезистивным чувствительным элементом и пьезорезистором на каждом. Двухсторонний возвратно-поступательный привод может быть выполнен термомеханическим, или магнитострикционным, или электростатическим, или электромагнитным, или пьезоэлектрическим. Изобретение позволит снизить вероятность случайной деформации структуры микрообъектов. 5 з.п. ф-лы, 2 ил.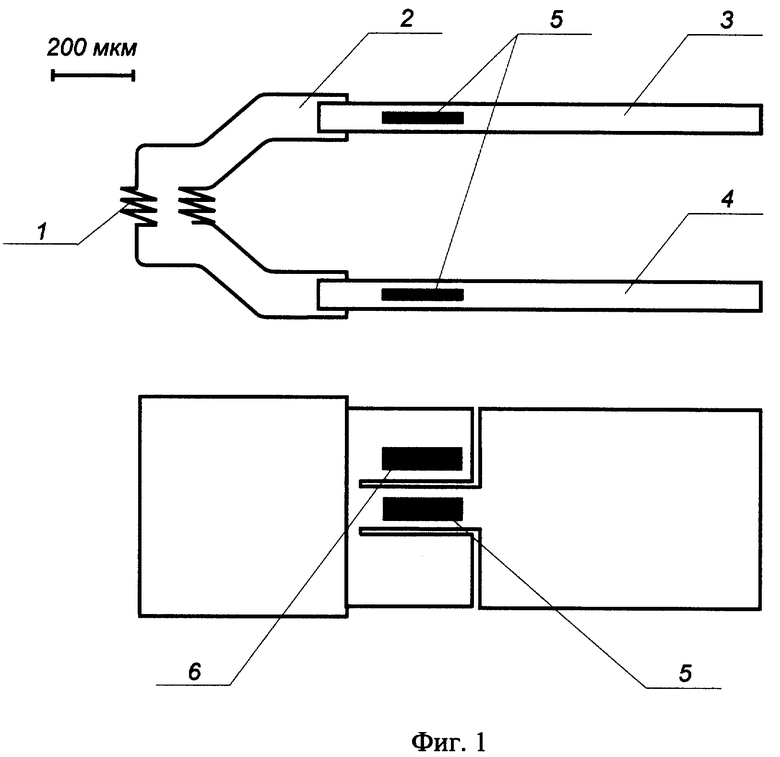
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |

