Изобретение относится к области робототехники, а именно к захватным устройствам, предназначенным для удержания и микропозиционирования миниатюрных механических деталей и электронных компонентов.
Аналогом изобретения является техническое решение по патенту US 4610475, в нем схват имеет два пьезоэлектрических пальца, подключенных к одному источнику напряжения. Данный схват имеет только возможность зажатия и отпускания детали, обратная связь зажима детали отсутствует. Аналогичные признаки у охвата пьезоэлектрического манипулятора по патенту RU 2172239.
Известен также микросхват с силовым очувствлением [патент RU 2261170]. Он содержит корпус охвата, верхний и нижний зажимные пальцы, выполненные, например, пьезоэлектрическими, на которых закреплены пьезорезистивные чувствительные элементы. Таким образом, функция очувствления осуществляется при помощи специальных датчиков. Такое техническое решение усложняет конструкцию охвата. В нем отсутствует также встроенная электронная система управления устройством, поэтому он не является мехатронным.
Наиболее близким по технической сущности к заявляемому изобретению является пьезоэлектрический микросхват с приводами, датчиками и системой управления [патент CN 2761377], который является мехатронным. Он включает два пальца, закрепленные на основании и выполненные в виде биморфных пьезоэлектрических актюаторов, подключенных к управляющему устройству, содержащему компьютер (микроконтроллер), источник питания пальцев схвата на цифроаналоговых преобразователях, измерители деформации пальцев (пьезорезистивные датчики деформаций), подключенные по мостовой измерительной схеме через аналого-цифровые преобразователи к компьютеру.
Изменение напряжения питания позволяет совершать изгибные деформации пальцев схвата для захвата деталей, причем на оба пальца подается одинаковое напряжение, поэтому смещение концов пальцев синфазно и симметрично относительно оси схвата. Величина и полярность напряжения питания пальцев управляются компьютером. Прототип имеет функцию детектирования процесса захвата. Недостатком прототипа является, во-первых, сложность конструкции микросхвата, во-вторых, ограниченные функциональные возможности микросхвата, заключающиеся в невозможности микроперемещений зажатой детали в микросхвате.
Целью изобретения является упрощение конструкции, повышение надежности и увеличение функциональных возможностей мехатронного пьезоэлектрического схвата.
Решение данной задачи достигнуто за счет того, что в мехатронном пьезоэлектрическом охвате, включающем пальцы, закрепленные на основании и выполненные в виде биморфных пьезоэлектрических актюаторов, подключенных к управляющему устройству, содержащему микроконтроллер, аналого-цифровые и цифроаналоговые преобразователи, в управляющее устройство введен модуль переключения режима работы схвата, причем цифроаналоговые преобразователи и аналого-цифровые преобразователи подключены через модуль переключения режимов к биморфным пьезоэлектрическим актюаторам.
Решение данной задачи достигнуто также за счет того, что в мехатронном пьезоэлектрическом схвате микроконтроллер управляющего устройства подключен через порт связи к ЭВМ верхнего уровня.
Сущность изобретения состоит в том, что биморфные пьезоэлектрические актюаторы пальцев служат в качестве независимо управляемых приводов пальцев и при помощи модуля переключения режимов служат пьезоэлектрическими датчиками деформаций пальцев, дающих информацию о захвате детали.
В заявляемом мехатронном пьезоэлектрическом схвате в отличие от прототипа напряжение питания на каждом пальце схвата регулируется независимо друг от друга микроконтроллером управляющего устройства посредством цифроаналоговых преобразователей, подключенных к пальцам схвата через модуль переключения режимов работы схвата.
Благодаря заявляемому техническому решению
- появилась возможность использовать актюаторы пальцев схвата в качестве датчиков путем введения в состав управляющего устройства модуля переключения режима работы схвата;
- отпала надобность в отдельных датчиках, закрепленных на пальцах схвата, что упрощает систему управления и делает конструкцию мехатронного пьезоэлектрического схвата более надежной по сравнению с прототипом;
- появилась возможность осуществления микропозиционирования детали в схвате посредством отдельного независимого управления напряжения на каждом пальце схвата по программе микроконтроллера;
- в состав управляющего устройства введен отдельный порт связи микроконтроллера с ЭВМ верхнего уровня, что упрощает интерфейс обмена данными в сравнении с прототипом.
Сущность изобретения поясняется следующими чертежами: на фиг.1 изображен мехатронный пьезоэлектрический схват; на фиг.2 - процесс захвата и микропозиционирования детали; на фиг.3 - вариант исполнения мехатронного пьезоэлектрического схвата с дополнительными цифроаналоговыми преобразователями, на фиг.4 - алгоритм захвата детали с тактильным очувствлением, на фиг 5 - алгоритм захвата детали с тактильным и резонансным очувствлением.
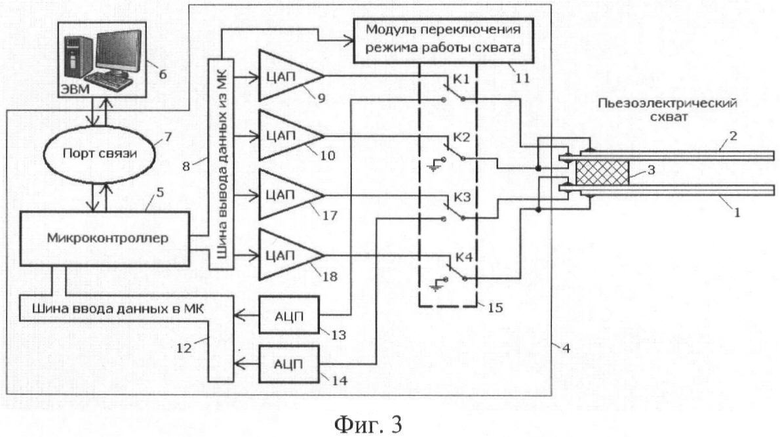
Мехатронный пьезоэлектрический схват (фиг.1) содержит два пальца, выполненные в виде биморфных пьезоэлектрических актюаторов (БПА) 1, 2, закрепленных на основании 3. БПА 1, 2 подключены к управляющему устройству 4. Управляющее устройство 4 содержит микроконтроллер (МК) 5 со встроенной Flash памятью, соединенный с ЭВМ верхнего уровня 6 через порт связи 7 и через шину вывода данных из МК 8 с цифроаналоговыми преобразователями (ЦАП) 9 и 10 (16, 17) и модулем переключения режимов работы схвата (МПРС) 11. МК 5 соединен также через шину ввода данных в МК 12 с аналого-цифровыми преобразователями (АЦП) 13 и 14. МПРС 11 включает в себя коммутационный блок 15 с переключателями К1 и К2, соединенными с выходами ЦАП 9, 10 и входами АЦП 13, 14, а также с БПА 1 и 2 пальцев схвата, которые зажимают деталь 16.
Мехатронный пьезоэлектрический схват реализует следующие основные функции манипулирования деталью 16:
- захват детали 16;
- отпускание детали 16;
- удержание детали 16;
- микропозиционирование детали 16 с помощью схвата;
- резонансное подтверждение события захвата детали пальцами схвата.
Управляющее устройство 4 выполняет следующие функции:
- переключение работы БПА 1, 2 пальцев схвата в режим привода и в режим - управление уровнями напряжений питания, подаваемых на БПА 1, 2, работающие в режиме привода;
- управление изгибом БПА 1 и 2 при помощи управляющей программы, находящейся во Flash памяти МК 5;
- обработка сигналов, поступающих от БПА 1, 2, работающих в режиме датчиков;
- осуществление связи системы управления с ЭВМ верхнего уровня 6.
Реализация функций приводов схвата при помощи БПА 1 и 2.
Для захвата детали мехатронным охватом МК выдает сигнал управления на МПРС 11 и ключи К1 и К2 устанавливаются в положении, показанном на фиг.1, то есть БПА 1 и 2 подготовлены к работе в качестве привода пальцев. Далее по программе МК выдает управляющие цифровые сигналы на ЦАП 9 и ЦАП 10, которые преобразуют их в нарастающее напряжение (до 70 В). В результате этого подключенные к ЦАП 9 и 10 БПА 1 и 2 изгибаются и сближаются до соприкосновения с деталью 16. Как вариант работы, возможен случай зажима детали 16 одним пальцем, например на БПА 1 подается напряжение через АЦП 9, а на БПА 10 напряжение не подается.
Отпускание детали 16 осуществляется одним или двумя пальцами схвата, включенными в режиме привода при подаче на них через ЦАП напряжения питания противоположной полярности, что приводит к разжиманию пальцев схвата и отпусканию детали 16.
Удержание детали в схвате осуществляется за счет подачи на БПА 1 и 2 пальцев напряжения постоянного уровня, достаточного для удержания детали 16 в схвате.
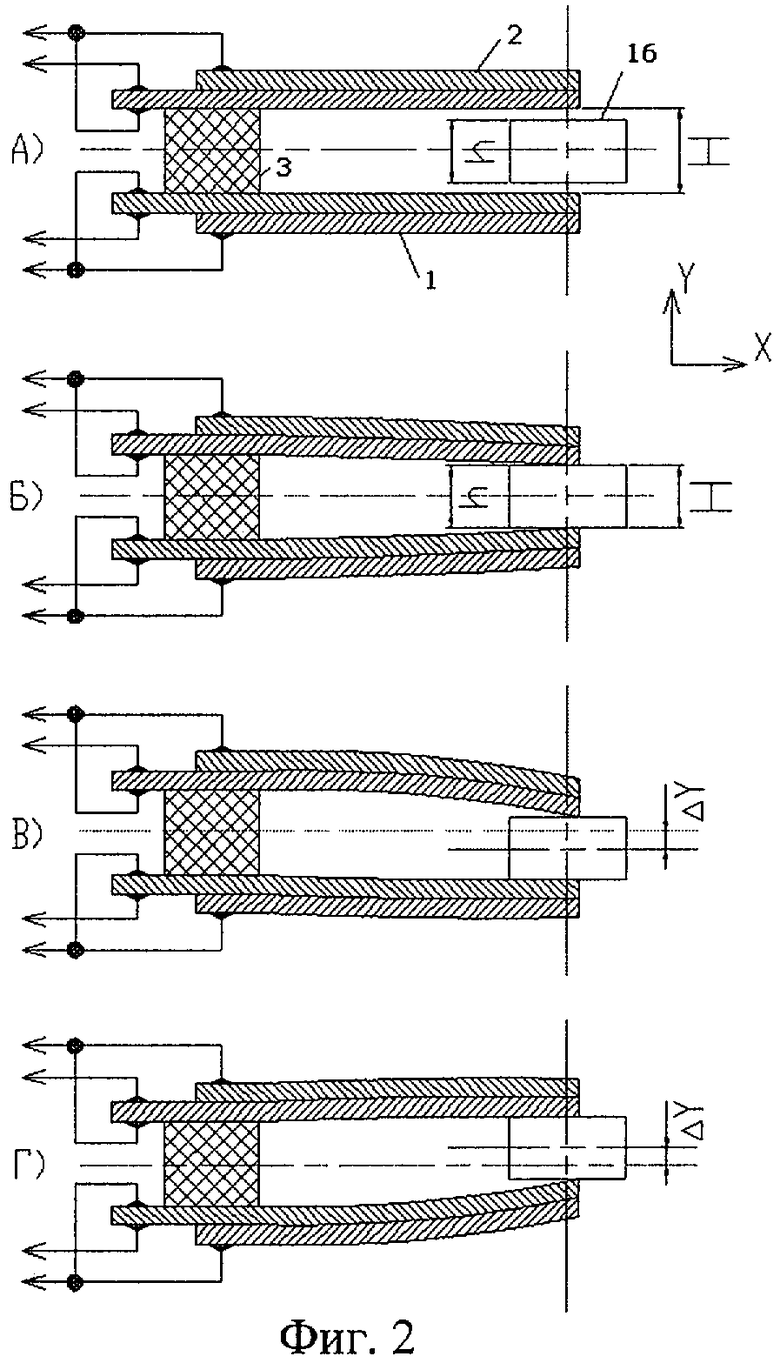
Новая функция мехатронного схвата - микропозиционирование зажатой в схвате детали (фиг.2) осуществляется при помощи изменения уровней напряжения питания для БПА 1 и БПА 2 в отдельности согласно управляющей программе, находящейся во Flash памяти МК 5. Вначале пальцы схвата не касаются детали 16 (фиг.2, А). В этом случае расстояние между пальцами равно Н, а толщина детали h. При подаче на БПА 1 и 2 одинакового постоянного напряжения пальцы симметрично сближаются до зажима детали 16 (фиг.2, Б). Далее по программе от МК 5 подаются разные управляющие сигналы на ЦАП 9 и ЦАП 10 таким образом, что напряжение на выходе ЦАП 9 возрастает, а на выходе ЦАП 10 уменьшается на одинаковую величину. В этом случае верхний палец (фиг.2, В) изгибается еще сильнее, а нижний палец распрямляется, что приводит к смещению детали 16 вниз на величину микропозиционирования. Аналогичным образом осуществляется перемещение детали в противоположную сторону (фиг.2, Г).
Модификация предлагаемого изобретения (фиг.3) состоит в том, что в управляющем устройстве 4 используются четыре ЦАП 9, 10, 17, 18 вместо двух ЦАП 9, 10 и в в коммутационном блоке 15 добавлены дополнительные переключатели К3-К4. Данная модификация имеет свои особенности: в данном случае осуществляется мостовая схема включения питания БПА 1 и 2, которая позволяет менять полярность электрического напряжения питания пьезоэлектрического привода пальцев схвата без использования высоковольтных биполярных ЦАП 9, 10 (как на фиг.1). Это уменьшает уровень требуемой разности выходного напряжения ЦАП в 2 раза.
Реализация функций датчиков может быть осуществлена двумя вариантами очувствления.
Первый вариант очувствления. Тактильное определение события захвата детали пальцами схвата основано на использовании прямого пьезоэффекта в БПА 1 или 2. В этом случае один из пальцев схвата включен в режиме привода (например, БПА 1), а второй палец схвата - в режиме датчика. Мехатронный схват подводится к детали 16 и первый палец схвата производит захватное движение и деталь зажимается между двумя пальцами, что приводит к возникновению силы давления со стороны детали 16 на БПА 2 второго пальца схвата, включенного в режиме датчика, что приводит к появлению в нем ЭДС. Сформированный таким образом сигнал через ключ К2, переключенный в нижнее положение при помощи МПРС 11, проходит на АЦП 14, который в свою очередь посылает цифровой сигнал в МК 5 о том, что имело место событие захвата детали охватом. Сила зажима определяется величиной эдс сигнала датчика.
Второй вариант очувствления. Тактильное определение величины силы зажима детали 16 охватом реализуется путем определения величины амплитуды эдс, сгенерированной на БПА 2 второго пальца схвата при подаче на БПА 1 первого пальца гармонического сигнала качающейся частоты. Таким образом, на БПА 2 подается напряжение, равное сумме гармонического сигнала и медленно повышающегося уровня постоянного напряжения, позволяющего приблизить палец к детали. Регистрация факта события захвата детали охватом основано на том, что при захвате детали изменяется масса конструкции захватного устройства, и резонанс частоты колебаний смещается в сторону понижения частоты, что определяется программой МК 5 при обработке показаний БПА 2, служащего датчиком силы. Определение частоты резонанса колебательной системы, состоящей из двух пальцев и зажатой между ними детали, осуществляется по амплитудно-частотной характеристике, которая формируется в МК 5 при качании частоты электрического напряжения, подаваемого на БПА 2. Чем лучше контакт между пальцами схвата и деталью, то есть, чем больше сила сжатия детали, тем выше амплитуда эдс на БПА 2. В данном случае достижение определенной величина амплитуды эдс на БПА 2 также может служить подтверждением факта события надежного захвата детали схватом.
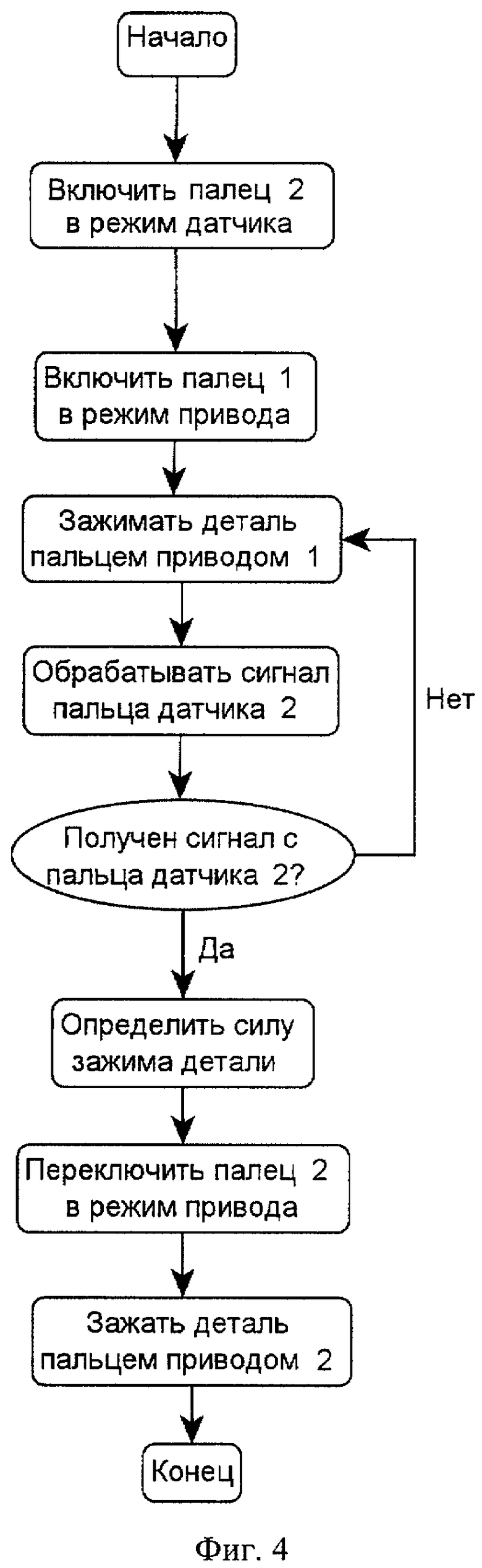
Для осуществления первого варианта очувствления применяется алгоритм захвата детали мехатронным охватом (фиг.4), который работает следующим образом. В исходном положении деталь 16 находится между пальцами схвата, но не зажата. Подается команда на включение пальца 2 (то есть БПА 2) в режим датчика. Далее подается команда на включение пальца 1 (то есть БПА 1) в режиме привода и на нем возрастает уровень напряжения. Далее осуществляется обработка сигналов от пальца 2, служащего датчиком. Если получен сигнал касания, то определяется сила зажима по уровню сигнала датчика. При достижении требуемого значения сигнала датчика палец 2 переключается в режим привода и на него подается напряжение, равное напряжению на пальце 1. Таким образом, деталь 16 зажимается и устанавливается симметрично оси схвата, как показано на фиг.2, Б.
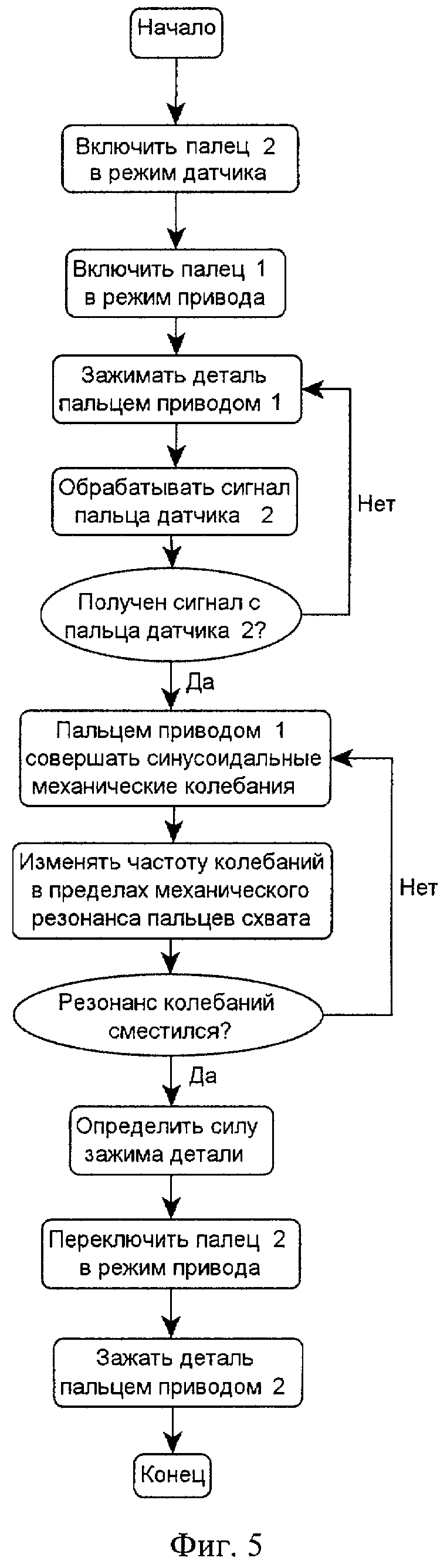
Для осуществления второго варианта очувствления применяется алгоритм захвата детали мехатронным охватом (фиг.5), который работает следующим образом. В исходном положении деталь 16 находится между пальцами схвата, но не зажата. Подается команда на включение пальца 2 в режим датчика. Далее подается команда на включение пальца 1 в режиме привода и на нем возрастает уровень напряжения. Далее осуществляется обработка сигналов от пальца 2, служащего датчиком. Если получен сигнал касания, то на палец 1 дополнительно подается синусоидальное напряжение качающейся частоты. Если частота резонанса сместилась относительно частоты резонанса без зажатой детали, то по амплитуде датчика определяют силу зажима детали. Далее палец 2 переключаются в режим привода и на него подается постоянное напряжение, равное напряжению на пальце 1.
Таким образом, заявляемое изобретение является мехатронным пьезоэлектрическим охватом с расширенными функциональными возможностями и повышенной надежностью. Мехатронный пьезоэлектрический схват реализует:
- захват и отпускание деталей;
- микропозиционирование зажатой в охвате детали;
- очувствление, выражающееся в определении момента взятия детали и силы зажима, которое осуществляется без применения дополнительных датчиков;
- связь с ЭВМ верхнего уровня.
При реализации заявляемого изобретения в качестве пальцев могут быть использованы пьезоэлектрические биморфные преобразователи, выпускаемые фирмой ОАО «ЭЛПА» (Россия) и имеющие размеры 35×2,5×0,6 мм. Тогда свободный ход каждого пальца составит ±0,5 мм при максимальном напряжении питания ±150 В, а микропозиционирование будет осуществляется в диапазоне ±0,1 мм с точностью не хуже 1 мкм.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ СХВАТ | 2013 |
|
RU2529126C1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| ДВУХКООРДИНАТНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДЕФЛЕКТОР | 2009 |
|
RU2402795C1 |
| ВИБРОКОНВЕЙЕР ДЛЯ МИНИАТЮРНЫХ ДЕТАЛЕЙ | 1993 |
|
RU2069162C1 |
| ПРИБОР ДЛЯ ФУНКЦИОНАЛЬНОЙ ДИАГНОСТИКИ | 2004 |
|
RU2286088C2 |
| АВТОНОМНЫЙ ЛЕТАТЕЛЬНЫЙ МИНИ-АППАРАТ | 2004 |
|
RU2271311C1 |
| УСТРОЙСТВО КОНТРОЛЯ И ОЦЕНКИ ФИЗИОЛОГИЧЕСКИХ ПРОЦЕССОВ | 2008 |
|
RU2378984C2 |
| УСТРОЙСТВО ДЛЯ ПЛАЗМЕННО-ЭЛЕКТРОЛИТИЧЕСКОГО ОКСИДИРОВАНИЯ ВЕНТИЛЬНЫХ МЕТАЛЛОВ И ИХ СПЛАВОВ | 2014 |
|
RU2584058C1 |
| ИМПУЛЬСНЫЙ ЭЛЕКТРОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2011 |
|
RU2473146C2 |
| ИМПУЛЬСНЫЙ ЭЛЕКТРОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2012 |
|
RU2521599C1 |
Изобретение относится к области робототехники, а именно к захватным устройствам, предназначенным для удержания и микропозиционирования миниатюрных механических деталей и электронных компонентов. Схват содержит пальцы, закрепленные на основании и выполненные в виде биморфных пьезоэлектрических актюаторов, подключенных к управляющему устройству, содержащему микроконтроллер, аналого-цифровые и цифроаналоговые преобразователи. Управляющее устройство снабжено модулем переключения режимов работы схвата, причем цифроаналоговые преобразователи и аналого-цифровые преобразователи подключены через модуль переключения режимов к каждому биморфному пьезоэлектрическому актюатору отдельно. Микроконтроллер управляющего устройства подключен через порт связи к ЭВМ верхнего уровня. Технический результат заключается в упрощении конструкции, повышении надежности и увеличении функциональных возможностей схвата. 1 з.п. ф-лы, 5 ил.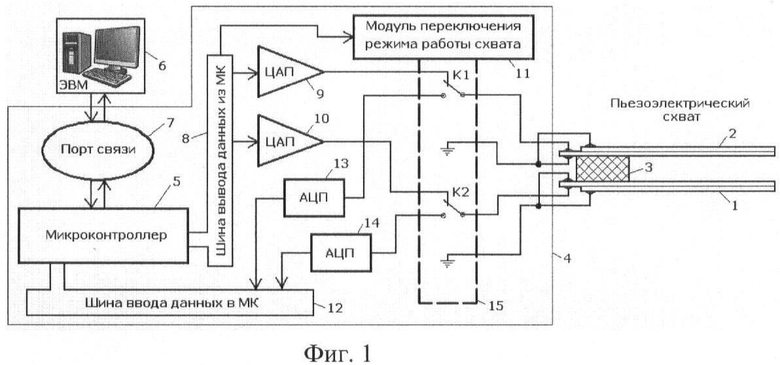
1. Мехатронный пьезоэлектрический схват, включающий пальцы, закрепленные на основании и выполненные в виде биморфных пьезоэлектрических актюаторов, подключенных к управляющему устройству, содержащему микроконтроллер, аналого-цифровые и цифроаналоговые преобразователи, отличающийся тем, что в управляющее устройство введен модуль переключения режимов работы схвата, причем цифроаналоговые преобразователи и аналого-цифровые преобразователи подключены через модуль переключения режимов к каждому биморфному пьезоэлектрическому актюатору отдельно.
2. Мехатронный пьезоэлектрический схват по п.1, отличающийся тем, что микроконтроллер управляющего устройства подключен через порт связи к ЭВМ верхнего уровня.
| CN 2761377 Y, 01.03.2006 | |||
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МАНИПУЛЯТОР | 1999 |
|
RU2172239C2 |
| Микроманипулятор | 1984 |
|
SU1202858A1 |
| Схват микроманипулятора | 1980 |
|
SU867646A1 |

