Изобретение относится к горному делу. Разработано для повышения уровня механизации и производительности при погрузке горной массы в транспортные средства в процессе проведения вертикальных стволов, проходимых буровзрывным способом.
Стволовые погрузочные машины, оснащенные предлагаемым рабочим оборудованием с управляемым грейфером, могут быть использованы не только для погрузки, но также и для зачистки горной массы в последней фазе погрузки.
Известны стволовые погрузочные машины по Н.А.Малевич. Машины и комплексы оборудования для проходки вертикальных стволов. М.: Недра, 1975, с.59-72. Это машины КС-2у/40, 2КС-2у/40, КСМ-2у, КС-1МА, 2КС-1МА.
Все рассматриваемые машины имеют сходное конструктивное устройство. Их рабочее оборудование состоит из шестилопастного грейфера, тельфера и лебедки. В качестве дополнительных устройств, которые следует относить к рабочему оборудованию относятся: радиальная рама, кольцевой или другой монорельс, тележка поворота и центральная ось подвески.
Шестилопастной грейфер подвешен посредством каната через блок (блоки) к тельферу, который перемещается по радиальной раме при помощи лебедки. При погрузке горной массы в бадью грейферу необходимы перемещения не только в радиальном направлении, но и по окружности. Последнее перемещение выполняется при помощи тележки поворота, перемещающейся по кольцевому монорельсу.
Недостатками рабочего оборудования рассматриваемых машин являются большая сложность конструкции, необходимость последовательного выполнения отдельных операций: опускание на забой грейфера с последующим поднятием, перемещение тельфера по радиальной раме и угловое перемещение грейфера с рамой к месту разгрузки - удлиняется цикл погрузки и, следовательно, снижается производительность. Кроме того, гибкая связь грейфера с подъемным устройством (тельфером) не позволяет осуществлять зачистку горной массы у стенок ствола в последней фазе погрузки из-за опрокидывания грейфера.
Известна стволовая погрузочная машина конструкции Блейера (Н.А.Малевич. Машины и комплексы оборудования для проходки вертикальных стволов. М.: Недра, 1975, с.73, 74).
Рабочее оборудование стволовой погрузочной машины Блейера по конструкции значительно проще рассмотренных выше. Оно состоит из подвижной в вертикальной плоскости стрелы, присоединенной шарнирно к поворотной турели, и подвешенного каната через блок грейфера. Подъем и опускание грейфера может осуществляться одновременно стрелой и лебедкой.
Недостатками рассматриваемого оборудования являются: возможность проведения ствола заданного диаметра (ограничение по вылету стрелы), заваливание (опрокидывание) грейфера при значительном сопротивлении на отдельно взятой лопасти, отсутствие возможности зачистки забоя у стенок ствола в последней фазе погрузки.
Известна конструкция стволовой буропогрузочной машины КС-12 по Н.А.Малевич. Машины и комплексы оборудования для проходки вертикальных стволов. М.: Недра, 1975, с.75-80.
Механизм вождения этой машины состоит из стойки, к которой крепятся: кабина машиниста, стрела, рукоять, гидравлические домкраты стрелы и рукояти и тележка вождения. Таким образом, механизм вождения представляет собой всю конструкцию буропогрузочной машины, за исключением монорельса, по которому перемещается механизм вождения посредством тележки вождения.
Конкретно же рабочее оборудование включает стойку, стрелу, рукоять, гидравлические домкраты стрелы и рукояти, шестилопастной грейфер, подвешенный посредством каната к пневматической лебедке, смонтированной на конце рукояти. Проект по использованию в качестве рабочего органа, состоящего из пневмоподъемника с грейфером от стволовой погрузочной машины с ручным вождением КС-3, с закреплением его шарнирно на конце рукояти не получил применения из-за невозможности зачерпывания горной массы в центральной части забоя ствола, так как малые размеры по длине стрелы и рукояти при их почти горизонтальном положении не позволяли рабочему органу достигнуть забоя при его отходе по мере погрузки горной массы.
Достоинством рабочего оборудования буропогрузочной машины КС-12 является широкий диапазон диаметров проводимых стволов 4,5-8 м.
К недостаткам относятся: подвеска грейфера на канате (неустойчивость грейфера на забое в процессе зачерпывания); необходимость перемещения всей машины по монорельсу (крепится на призабойной опалубке) при погрузке горной массы, так как рабочее оборудование не имеет возможности поворота в горизонтальной плоскости относительно вертикальной оси стойки.
Известна также стволовая погрузочная машина «Погрузчик» (Н.А. Малевич. Машины и комплексы оборудования для проходки вертикальных стволов. М.: Недра, 1975, с.57-58).
Рабочее оборудование рассматриваемой машины включает раму, каретку, стрелу с шарнирно закрепленной на ней рукоятью, грейфер, пневмолебедку, смонтированную на верхнем конце рукояти и служащую для подъема и опускания грейфера, гидродомкраты для изменения положения стрелы и рукояти в вертикальной плоскости и мачту для дугового поворота рабочего оборудования в горизонтальной плоскости.
К недостаткам следует отнести следующее: подвеска грейфера на канате - неустойчивость его положения при зачерпывании горной массы; малая величина амплитуды по высоте стрелы из-за размещения ее домкрата на мачте поворота, малой длины стрелы, а также размещения кабины машиниста непосредственно под стрелой.
Наиболее близким по конструктивному устройству и принципу работы является рабочее оборудование «Стволовое погрузочное устройство», известное по А.с. СССР №881329, 25.11.1981.
Рассматриваемое рабочее оборудование «Стволовое погрузочное устройство» состоит из радиального, вертикального и кругового механизмов перемещения грейфера. Механизм радиального перемещения включает стрелу, рукоять и их силовые домкраты. Механизм вертикального перемещения - подъемник (неизвестной конструкции), который присоединен к концу рукояти посредством каната. Механизм кругового перемещения (более правильно - дугового или секторного поворота) неизвестного конструктивного устройства и принципа действия.
К недостаткам рабочего оборудования относятся: неуправляемость и неустойчивость грейфера в забое в процессе зачерпывания горной массы; малая величина амплитуды по высоте стрелы из-за размещения домкрата ее поворота на поворотном механизме.
На основании вышеизложенного имеется необходимость в разработке более совершенной конструктивной схемы рабочего оборудования стволовой погрузочной машины с возможностями погрузки на всю высоту разрушенного взрывной отбойкой слоя горной массы, а также зачистки забоя у стенок ствола в последней фазе погрузки.
Задачей настоящего изобретения является разработка конструкции универсального рабочего оборудования для стволовых погрузочных машин с жесткими кинематическими связями между отдельными звеньями. Разрабатываемое рабочее оборудование должно обеспечивать погрузку горной массы в широком диапазоне с радиусом зачерпывания, превышающим половину диаметра проводимого ствола, а также позволяющим осуществлять зачистку забоя у стенок ствола в последней фазе погрузки.
Согласно изобретению поставленные задачи достигаются тем, что рабочее оборудование стволовой погрузочной машины с управляемым грейфером, включающее монтажную плиту со смонтированными на ней поворотной мачтой и реечным гидродомкратным механизмом ее поворота, смонтированную шарнирно на поворотной мачте стрелу, связанную с ней шарнирно рукоять, грейфер, гидроподъемник, гидродомкраты для управления положением стрелы, рукояти и управления грейфера, отличающееся тем, что к свободному концу удлиненной рукояти посредством одинарного шарнира присоединен рабочий орган, который состоит из управляемого грейфера, гидроподъемника, служащего для подъема и опускания грейфера на забой, и двух управляющих гидродомкратов, связанных между собой шарнирными связями. При этом управляемый грейфер имеет возможность ограниченного поворота в вертикальной и полного поворота в горизонтальной плоскостях, а также фиксации различного его положения в этих плоскостях при помощи двух управляющих гидродомкратов, связанных с гидроподъемником посредством жестко закрепленных на нем стоек и шаровых или карданных шарниров, а с траверсой управляемого грейфера одинарными шарнирами. Управляющие гидродомкраты установлены под пространственными углами к вертикальной оси рабочего органа. Гидродомкрат для поворота (перемещения) удлиненной стрелы в вертикальной плоскости верхним концом присоединен к монтажной плите посредством шарового или карданного шарнира с возможностью поворота в горизонтальной плоскости совместно со стрелой, что позволяет уменьшить размеры и массу поворотной мачты и монтажной плиты, а нижним концом с удлиненной стрелой одинарным шарниром.
Существенными отличиями является следующее.
1. Рабочее оборудование стволовой погрузочной машины с управляемым грейфером, включающее монтажную плиту со смонтированными на ней поворотной мачтой и реечным гидродомкратным механизмом ее поворота, смонтированную шарнирно на поворотной мачте стрелу, связанную с ней шарнирно рукоять, гидроподъемник, грейфер, гидродомкраты для управления положением стрелы, рукояти и грейфера имеет рабочий орган, состоящий из гидроподъемника, управляемого грейфера и двух управляющих гидродомкратов и связанных между собой шарнирно. Рабочий орган присоединен в к свободному концу удлиненной рукояти одинарным шарниром, позволяющим исключить отклонение рабочего органа от вертикали при зафиксированном положении рукояти и стрелы в процессе зачерпывания.
2. Управляемый грейфер присоединен к гидроподъемнику при помощи шарового или карданного шарнира и имеет возможность ограниченного поворота в вертикальной и полного поворота в горизонтальной плоскостях и фиксации его различного положения посредством двух управляющих гидродомкратов, установленных под пространственными углами к продольной оси рабочего органа. При этом, управляющие гидродомкраты посредством шаровых или карданных шарниров верхними концами сопряжены со стойками, жестко смонтированными на корпусе гидроподъемника, а нижними концами одинарными шарнирами с траверсой управляемого грейфера.
3. Гидродомкрат для поворота (перемещения) удлиненной стрелы в вертикальной плоскости верхним концом присоединен к монтажной плите посредством шарового или карданного шарнира с возможностью поворота в горизонтальной и вертикальной плоскостях, а нижним концом одинарным шарниром соединен со стрелой. Такой способ размещения и соединения гидродомкрата позволяет уменьшить размеры и массы поворотной мачты и монтажной плиты.
4. Использование удлиненных стрелы и рукояти позволяет осуществлять выгрузку из забоя разрушенной горной массы на большую глубину и с большим радиусом с одной установки рабочего оборудования или всей стволовой погрузочной машины.
Сущность изобретения поясняется чертежами.
Фиг.1. Общая конструктивная схема рабочего оборудования стволовой погрузочной машины с управляемым грейфером.
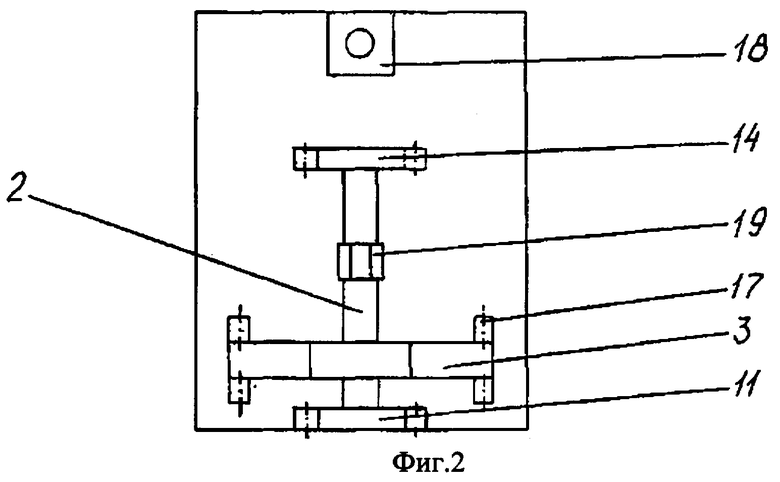
Фиг.2. Общий вид монтажной плиты с размещенным на ней оборудованием.
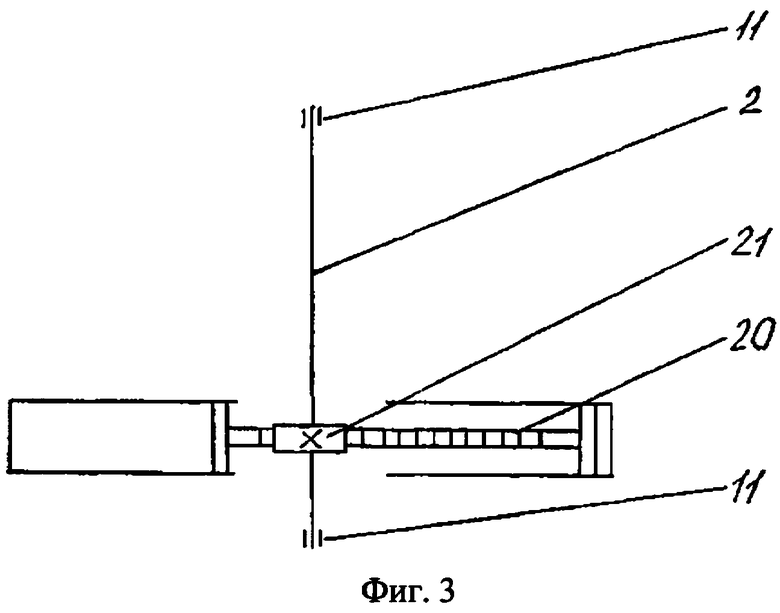
Фиг.3. Кинематическая схема реечного гидродомкратного механизма поворотной мачты.
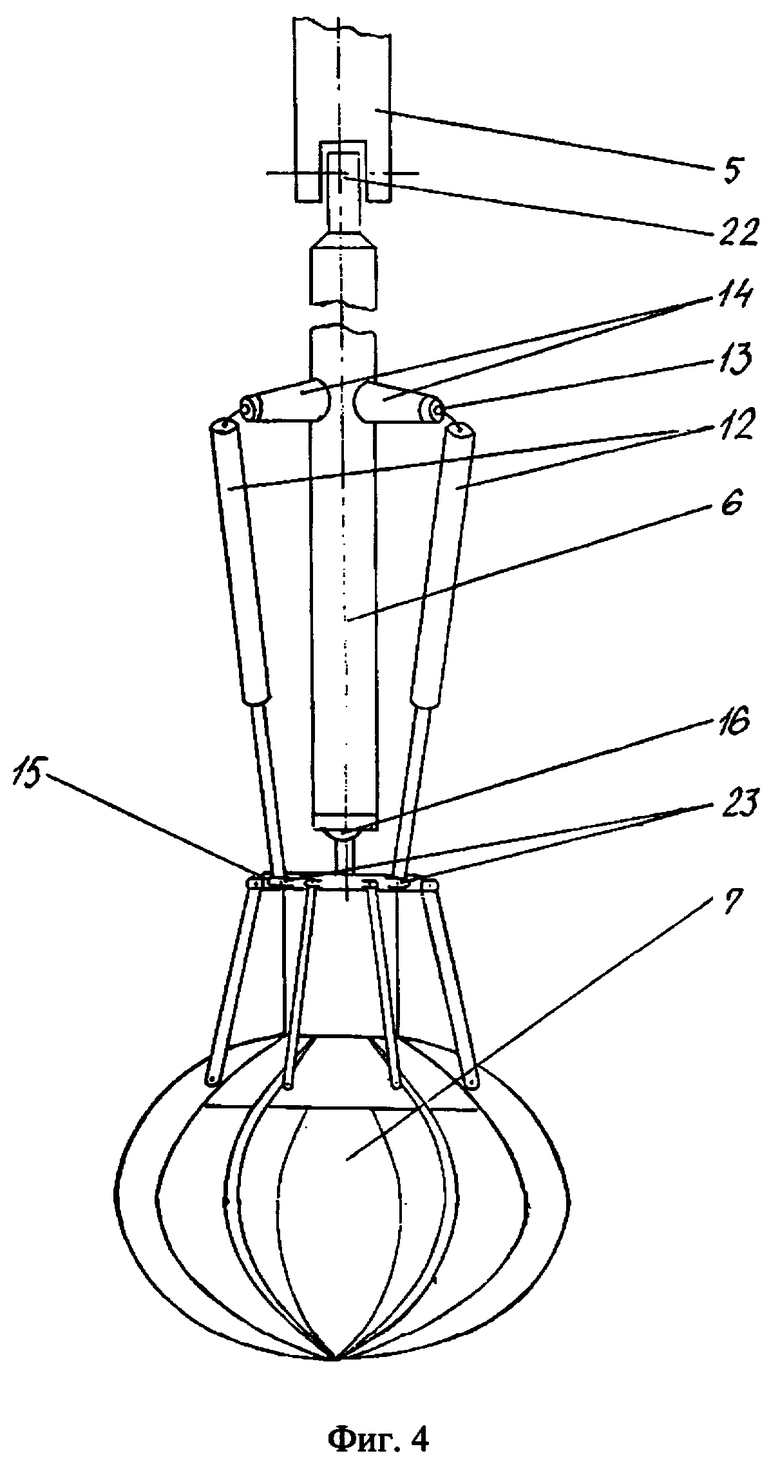
Фиг.4. Общий вид (вид А фиг.1) рабочего органа с управляемым грейфером, связанного шарнирно со свободным концом рукояти.
На фиг.1 представлена общая конструктивная схема рабочего оборудования стволовой погрузочной машины с управляемым грейфером. Оно состоит из монтажной плиты 1, на которой смонтированы поворотная мачта 2 с реечным гидродомкратным механизмом 3 ее поворота. К поворотной мачте 2 посредством одинарного шарнира присоединена удлиненная стрела 4 с возможностью ограниченного поворота в вертикальной плоскости. Со стрелой 4 шарнирно связана удлиненная рукоять 5. К нижнему концу рукояти 5 одинарным шарниром присоединен рабочий орган, состоящий из гидроподъемника 6 и управляемого грейфера 7. Поворот стрелы 4 в вертикальной плоскости осуществляется при помощи гидродомкрата 8, присоединенного к монтажной плите 1 посредством шарового шарнира 9. Поворот удлиненной рукояти 5 относительно стрелы 4 осуществляется гидродомкратом 10. Поворотная мачта 2 закреплена на опорной плите 1 при помощи верхней и нижней опор 11.
Управляющие гидродомкраты 12 служат для осуществления ограниченного поворота в вертикальной и полного поворота в горизонтальной плоскостях управляемого грейфера, а также для фиксации различного его положения. Управляющие гидродомкраты 12 верхними концами посредством шаровых шарниров 13 присоединены к стойкам 14, жестко закрепленным на корпусе гидроподъемника 5, а нижними концами одинарными шарнирами с траверсой 15 управляемого грейфера 7.
Управляемый грейфер 7 соединен с гидроподъемником 5 при помощи шарового шарнира 16.
Удлиненные стрела 4 и рукоять 5 позволяют обслуживать большую часть забоя ствола. При этом расстояние между крайними - верхним и нижним положениями удлиненной стрелы 4 должны соответствовать толщине разрушенного взрывной отбойкой слоя горной массы.
На фиг.1 представлены три положения рабочего оборудования и два положения рабочего органа. I - положение рабочего оборудования, когда стрела занимает горизонтальное положение, а рукоять с рабочим органом вертикальное. При таком положении осуществляется погрузка горной массы из центральной зоны ствола. II - крайнее верхнее положение рабочего оборудования. Зачерпывание горной массы рабочим органом в начальной фазе погрузки. III - положение рабочего оборудования при зачистке горной массы у стенок ствола в последней фазе погрузки. IV - рабочий орган рабочего оборудования в нижнем положении перед раскрытием грейфера для последующего зачерпывания горной массы.
На фиг.2 представлен общий вид монтажной плиты 1 (вид в плане). На монтажной плите 1 смонтированы: поворотная мачта 2, реечный гидродомкратный механизм 3 для поворота мачты 2, верхняя и нижняя опоры 11 для поворотной мачты, крепления реечного гидродомкратного поворотного механизма 17, гнездо 18 для крепления шарового шарнира 9 гидродомкрата 8 для поворота стрелы и кронштейн 19 для крепления стрелы 4.
На фиг.3 представлена кинематическая схема реечного гидродомкратного механизма поворота 3, состоящего из реечного гидродомкрата 20 и шестерни 21, жестко закрепленной на поворотной мачте 2.
На фиг.4 представлена общая конструктивная схема рабочего органа, состоящего из гидроподъемника 6 и управляемого грейфера 7. Рабочий орган подвешен к свободному концу рукояти 5 при помощи одинарного шарнира 22. Управляемый грейфер 7 при помощи управляющих гидродомкратов 12 при их синхронном движении поворачивается в вертикальной плоскости, перпендикулярной к фиг.4. При асинхронном (противоположном) движении гидродомкратов 12 управляемый грейфер 7 поворачивается в плоскости фиг.4. При одно- и разнонаправленном движениях управляющих гидродомкратов 12 с различными скоростями управляемый грейфер 7 может быть повернут под разными углами в плане, а также зафиксирован в заданном положении.
Управляемый грейфер 7 присоединен к гидроподъемнику 6 посредством шарового шарнира 16 с возможностью поворота в любом направлении. Повороты управляемого грейфера осуществляются при помощи двух управляющих гидродомкратов 12, которые верхними частями соединены со стойками 14, жестко смонтированными на корпусе гидроподъемника 6, посредством шаровых шарниров 13, а нижними частями одинарными шарнирами с кронштейнами 23 траверсы 15 управляемого грейфера.
Принцип работы рабочего оборудования стволовой погрузочной машины с управляемым грейфером.
В первой фазе погрузки горной массы рабочее оборудование устанавливается в положение II (фиг.1). При этом управляемый грейфер 7 располагается от груди забоя на расстоянии, равном длине хода гидроподъемника 6 (длина хода гидроподъемника определяется высотой транспортного средства - обычно высотой бадьи). По мере выгрузки (уборки) горной массы с забоя ствола, рабочее оборудование постепенно переводится в положение I с дальнейшим поворотом рукояти в противоположную сторону от монтажной плиты 1. Это средняя фаза погрузки горной массы.
При заключительной (последней) фазе погрузки с зачисткой горной массы у стенок ствола рабочее оборудование занимает положение III.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЫЧАЖНОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ СТВОЛОВОЙ ПОГРУЗОЧНОЙ МАШИНЫ С УПРАВЛЯЕМЫМ ГРЕЙФЕРОМ | 2008 |
|
RU2362878C1 |
| РЫЧАЖНОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ СТВОЛОВОЙ ПОГРУЗОЧНОЙ МАШИНЫ С УПРАВЛЯЕМЫМ ГРЕЙФЕРОМ | 2008 |
|
RU2380542C1 |
| РЫЧАЖНОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ СТВОЛОВОЙ ПОГРУЗОЧНОЙ МАШИНЫ С УПРАВЛЯЕМЫМ ГРЕЙФЕРОМ | 2008 |
|
RU2370598C1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2010 |
|
RU2449127C1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2011 |
|
RU2460884C1 |
| РАБОЧИЙ ОРГАН СТВОЛОВОЙ ПОГРУЗОЧНОЙ МАШИНЫ | 2007 |
|
RU2361086C2 |
| СТВОЛОВАЯ ПОГРУЗОЧНАЯ МАШИНА С РЫЧАЖНЫМ РАБОЧИМ ОБОРУДОВАНИЕМ | 2008 |
|
RU2377408C1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2011 |
|
RU2455489C1 |
| СТВОЛОВАЯ ПОГРУЗОЧНАЯ МАШИНА | 2009 |
|
RU2418169C1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2010 |
|
RU2426884C1 |
Изобретение относится к горному делу, а именно к рабочему оборудованию стволовой погрузочной машины с управляемым грейфером. Технический результат - повышение уровня механизации и производительности при погрузке горной массы в транспортные средства в процессе проведения вертикальных стволов. Рабочее оборудование стволовой погрузочной машины с управляемым грейфером включает рабочий орган, состоящий из шарнирно связанных между собой гидроподъемника 6 и управляемого грейфера 7, монтажную плиту 1 со смонтированными на ней поворотной мачтой 2 с механизмом ее поворота 3, смонтированную шарнирно на поворотной мачте 2 стрелу 4, связанную с ней шарнирно рукоять 5, к нижнему концу которой шарнирно присоединен рабочий орган своим гидроподъемником 6, гидродомкраты 8 и 10 для поворота стрелы и рукояти в вертикальной плоскости. Рабочий орган снабжен двумя управляемыми гидродомкратами 12, корпуса которых посредством шаровых шарниров 13 соединены со стойками 14, жестко закрепленными на корпусе гидроподъемника 6, а штоки посредством одинарных шарниров связаны с траверсой 15 управляемого грейфера, связанного в свою очередь с гидроподъемником посредством шарового шарнира. При этом гидродомкрат 8 поворота стрелы в вертикальной плоскости верхним концом связан с монтажной плитой 1 шаровым шарниром 9 с возможностью его поворота в горизонтальной плоскости совместно со стрелой 4. Механизм поворота поворотной мачты 2 выполнен в виде реечного гидродомкрата 3. 4 ил.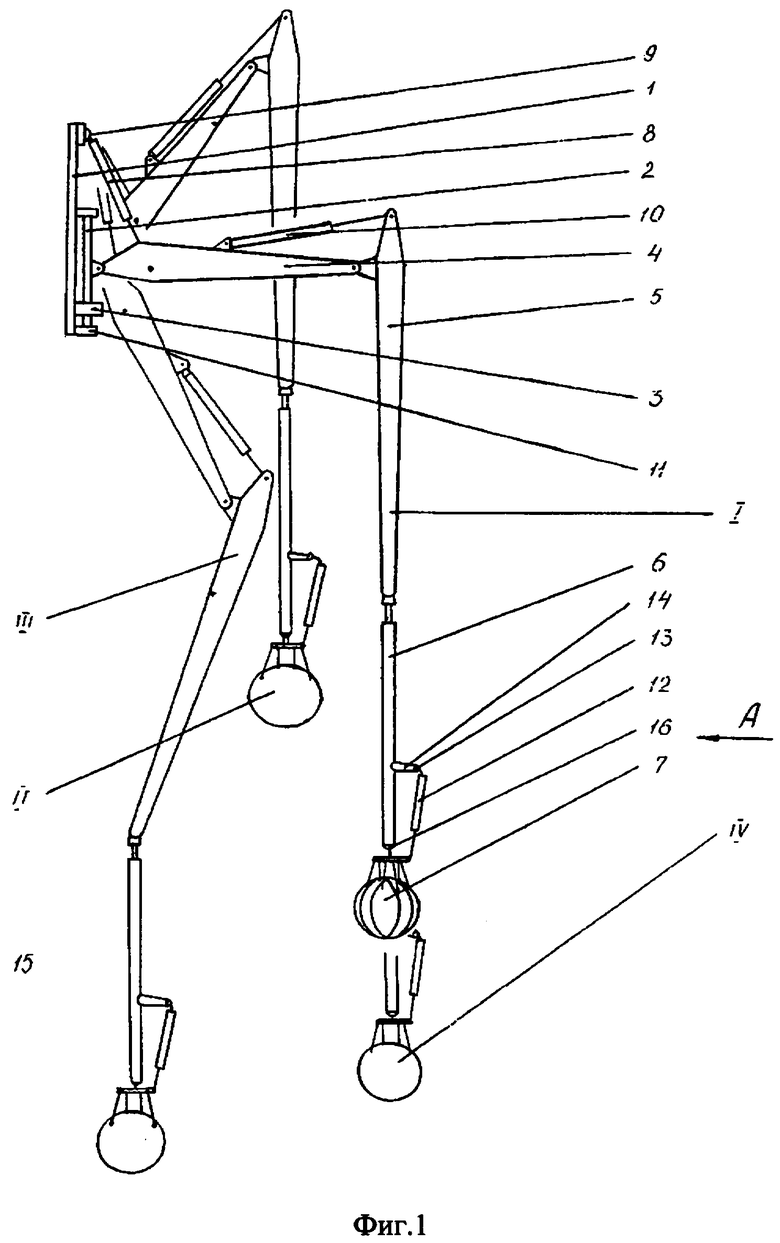
Рабочее оборудование стволовой погрузочной машины с управляемым грейфером, включающее рабочий орган, состоящий из шарнирно связанных между собой гидроподъемника и управляемого грейфера, монтажную плиту со смонтированной на ней поворотной мачтой с механизмом ее поворота, смонтированную шарнирно на поворотной мачте стрелу, связанную с ней шарнирно рукоять, к нижнему концу которой шарнирно присоединен рабочий орган своим гидроподъемником, гидродомкраты для поворота стрелы и рукояти в вертикальной плоскости, отличающееся тем, что для обеспечения возможности ограниченного поворота управляемого грейфера в двух взаимно перпендикулярных вертикальных плоскостях, а также полного поворота в горизонтальной плоскости, рабочий орган снабжен двумя управляющими гидродомкратами, корпуса которых посредством шаровых шарниров соединены со стойками, жестко закрепленными на корпусе гидроподъемника, а штоки посредством одинарных шарниров связаны с траверсой управляемого грейфера, связанного в свою очередь с гидроподъемником посредством шарового шарнира, при этом гидродомкрат поворота стрелы в вертикальной плоскости верхним концом связан с монтажной плитой шаровым шарниром с возможностью его поворота в горизонтальной плоскости совместно со стрелой, а механизм поворота поворотной мачты выполнен в виде реечного гидродомкрата.
| Стволовое породопогрузочное устройство | 1980 |
|
SU881329A1 |
| Проходческий многочелюстной грейфер | 1971 |
|
SU488013A1 |
| Стволовое породопогрузочное устройство | 1978 |
|
SU775324A1 |
| Стволовое породопогрузочное устройство | 1984 |
|
SU1167335A1 |
| Грейферная породопогрузочная машина для проходки вертикальных шахтных стволов | 1985 |
|
SU1314073A1 |
| 0 |
|
SU168711A1 | |
| Устройство для фиксации металлического резонатора | 1977 |
|
SU657589A1 |
| МАЛЕВИЧ Н.А | |||
| Машины и комплексы оборудования для проходки вертикальных стволов | |||
| - М.: Недра, 1975, с.59-72. | |||

