Изобретение относится к трубопроводному транспорту и может использоваться при бестраншейной и безостановочной технологии ремонта трубопроводов различного назначения.
Известен способ санирования трубопроводов по патенту RU № 2306477, заключающийся в том, что производят удаление отложений внутри трубопроводов с последующим контролем состояния внутренней поверхности и введением защитного элемента со стороны открытого конца трубопровода, отличающийся тем, что после удаления отложений проводят зачистку внутренних острых кромок по всей длине трубопровода, включая изгибы, при этом контроль состояния внутренней поверхности трубопроводов осуществляют протягиванием через всю длину трубопровода отрезка жесткой полимерной трубы, а в качестве защитного элемента используют жесткую полимерную трубу.
Основным недостатком указанного способа является то, что для его осуществления необходимо прекращать эксплуатацию ремонтируемого участка трубопровода, а также необходимы дополнительные технические устройства и операции для перемещения жесткой полимерной трубы внутри трубопровода.
Наиболее близким к заявляемому способу является патент RU № 2319059, принятый в качестве ближайшего аналога способа, заключающийся в том, что способ по введению плети пластмассовых труб осуществляется так, что в восстанавливаемый негерметичный трубопровод крепят плети к тяговому механизму, протягивают плети в полости трубопровода тяговым механизмом, тяговое усилие создают перемещением тягового механизма внутри трубопровода в результате силового взаимодействия его со стенками трубопровода.
Основным недостатком указанного изобретения является то, что для его осуществления необходимо останавливать эксплуатацию ремонтируемого трубопровода, чтобы предотвратить попадание посторонних предметов в зазор между ремонтируемым участком и плетью пластмассовых труб. Остановка эксплуатации крупного или магистрального трубопровода связана со значительными временными и финансовыми затратами.
Перед заявляемым изобретением в части способа поставлена задача обеспечить перемещение, инспекцию и ремонт трубопровода без остановки его эксплуатации.
Поставленная задача решается следующим образом: устройство для инспекции и ремонта помещают в трубопровод и перемещают в нем до обнаружения поврежденного участка, закрепляют его около поврежденного участка и проводят ремонтные операции, при этом устройство для инспекции и ремонта снабжают способностью передвижения в потоке трубопровода с использованием энергии потока, герметично изолируют область поврежденного участка распиранием эластичных элементов устройства, которые располагают по внешней границе поврежденного, ремонтируемого участка, а поток направляют через временный трубопровод, образованный с помощью устройства.
Распирание эластичных элементов устройства может осуществляться наддувом камер эластичных элементов.
Закрепление устройства около поврежденного участка может осуществляться распиранием сначала заднего по ходу потока эластичного элемента устройства, а затем распиранием переднего по ходу потока эластичного элемента устройства.
Закрепление устройства около поврежденного участка трубопровода может быть осуществлено тем, что распирают сначала передний по ходу потока эластичный элемент устройства, затем удлиняют временный трубопровод, затем распирают задний по ходу потока эластичный элемент устройства, затем сдувают передний по ходу потока эластичный элемент устройства, затем укорачивают временный трубопровод, затем снова распирают передний по ходу потока эластичный элемент устройства.
Известно устройство для облицовки внутренних поверхностей труб рукавным термопластичным пленочным материалом по патенту RU № 2182275, содержащее герметичную камеру с установленным в ней барабаном и систему подачи рабочего агента, источник питания, кабель для подачи энергии, тор и термопластичный пленочный рукав, отличающееся тем, что тор выполнен в виде токопроводящей тороидальной оболочки, через внутреннюю поверхность которой продеты токопроводящие бесконечные ленты, огибающие данную оболочку, и ролики, соединенные токопроводящей перемычкой. Под действием избыточного давления рукав, выворачиваясь, укладывается по длине ремонтируемого трубопровода. После чего избыточное давление сбрасывается.
Основным недостатком указанного устройства является то, что для обеспечения его функционирования необходим трубопровод, выведенный из эксплуатации, и не имеющий поворотов с небольшим радиусом, из-за которого может произойти утыкание рукава в стенку трубопровода.
Также известно устройство для локальной облицовки внутренней поверхности трубопровода по патенту №2172446, принятое в качестве ближайшего аналога устройства, содержащее центральный стержень, расположенную вокруг него эластичную оболочку, выполненное в виде пропитанного связующим армирующего рукава, размещенного между внутренней и внешней разделительными пленками, облицовочное покрытие, охватывающее эластичную оболочку, и защитный кожух, отличающееся тем, что центральный стержень выполнен составным и снабжен установленными на его концах и ориентированными закрытыми торцами друг к другу заглушками, имеющими переменное сечение диаметра, при этом на поверхностях большего наружного диаметра заглушек закреплены концы эластичной оболочки и внутренней разделительной пленки, а на поверхностях меньшего наружного диаметра заглушек закреплены концы дополнительной внутренней оболочки с образованием герметичной полости между этими оболочками, а защитный кожух выполнен жестким.
Основным недостатком указанного устройства является то, что его функционирование возможно только при остановке эксплуатации ремонтируемого трубопровода, а также необходимо дополнительное оборудование - трос и устройство для его протяжки для обеспечения перемещения указанного устройства в трубопроводе.
Перед заявляемым изобретением в части устройства поставлена задача обеспечить перемещение устройства в трубопроводе, а также инспекцию и ремонт поврежденных участков трубопровода без остановки эксплуатации трубопровода.
Поставленная задача решается за счет того, что устройство для осуществления способа инспекции и ремонта трубопроводов, представляющее собой роботизированный комплекс, содержит средства перемещения, крепления, инспекции и ремонта участков трубопровода, при этом комплекс снабжен способностью перемещаться энергией потока в трубопроводе за счет двух тороидальных эластичных элементов, расположенных на роботизированном комплексе спереди и сзади по ходу потока, и имеет герметично связанный с тороидальными эластичными элементами гибкий патрубок.
Средства для инспекции и ремонта участков трубопровода могут быть расположены на внешней поверхности гибкого патрубка.
Тороидальные эластичные элементы могут быть снабжены надуваемыми камерами.
Роботизированный комплекс может быть соединен с источником энергопитания через свободновисящий кабель.
Роботизированный комплекс может быть соединен с пультом управления через свободновисящий кабель.
Свободновисящий кабель, соединяющий роботизированный комплекс с системами энергообеспечения и/или управления, может объединять как передачу энергии на роботизированный комплекс, так и функцию передачи и получения информации на пульт управления.
Роботизированный комплекс может быть снабжен аккумуляторами энергии.
Роботизированный комплекс может быть снабжен устройством автономного управления.
Эластичные элементы роботизированного комплекса могут быть выполнены с сегментированными надуваемыми камерами в зоне контакта с внутренней поверхностью трубопровода.
Таким образом достигнут технический результат способа и устройства для инспекции и ремонта трубопроводов, а именно обеспечена возможность перемещения устройства и инспекции, и ремонта трубопровода без необходимости остановки эксплуатации трубопровода.
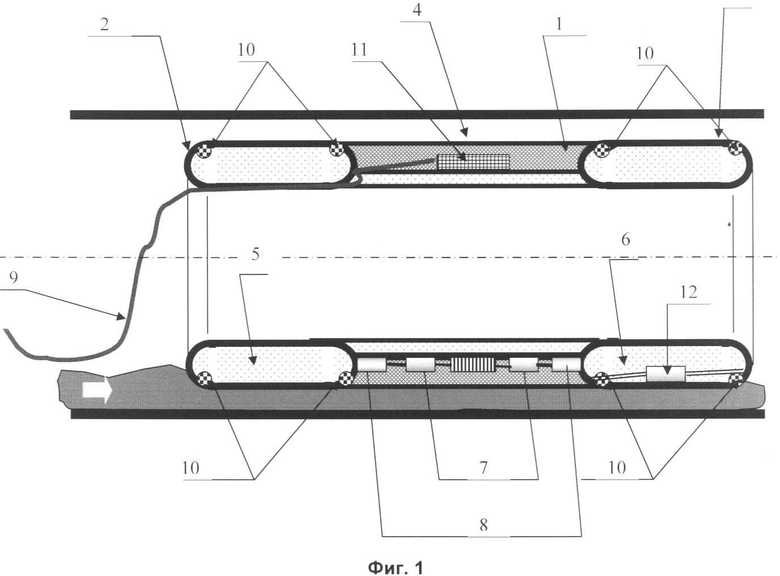
На фиг.1 показан общий конструктивный вид в разрезе роботизированного комплекса, перемещающегося вместе с потоком.
На фиг.2 показан роботизированный комплекс, закрепленный в трубопроводе.
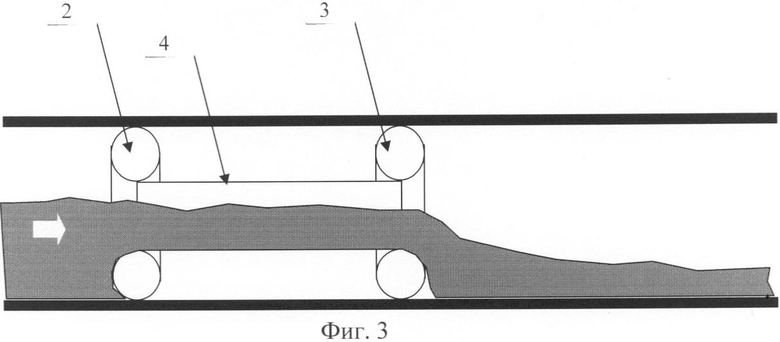
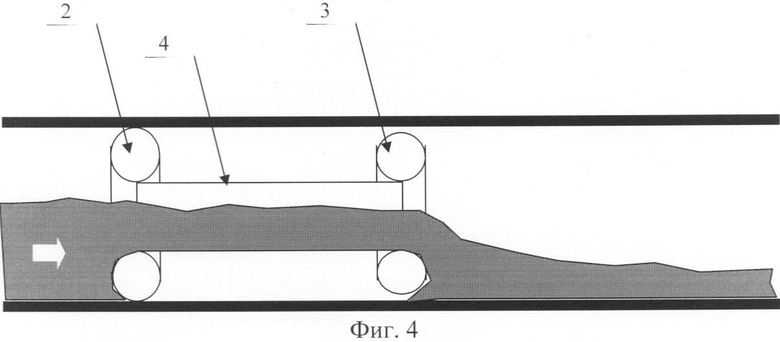
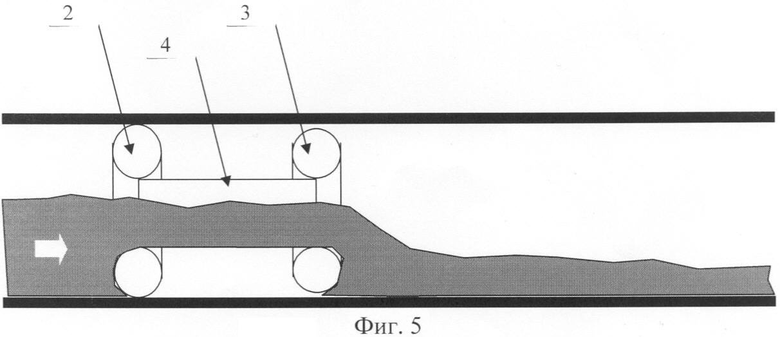
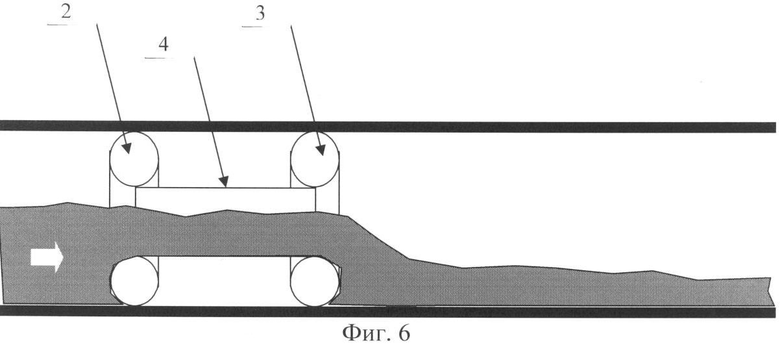
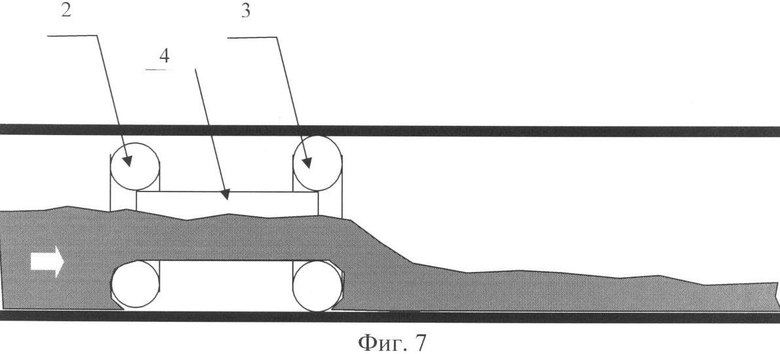
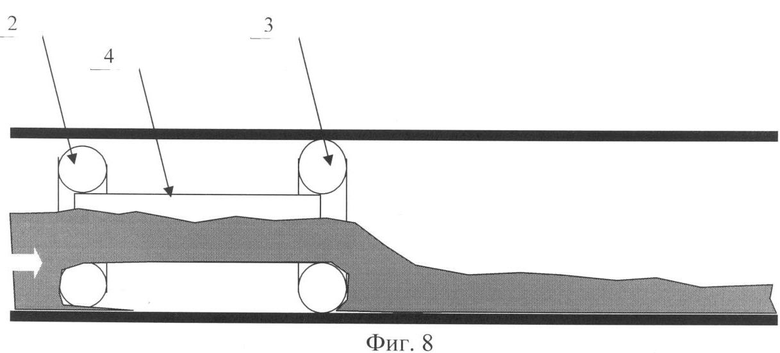
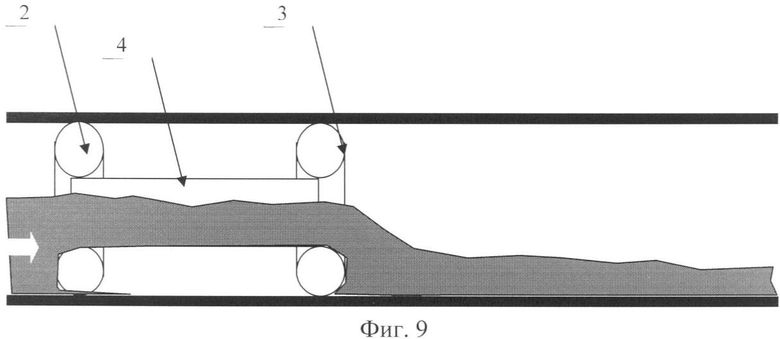
На фиг.3-9 показана последовательность действий, необходимая для перемещения роботизированного комплекса против движения потока.
Устройство для инспекции и ремонта трубопроводов состоит из роботизированного комплекса 1 (см. фиг.1), который содержит два тороидальных эластичных элемента 2 и 3 и гибкий патрубок 4, соединенный герметично с эластичными элементами 2 и 3. Эластичные элементы 2 и 3 имеют внутренние герметичные камеры 5 и 6, которые через систему подачи и распределения воздуха связаны с аккумуляторами давления 7 (баллоны со сжатым воздухом). Аккумуляторы давления 7 в случае полностью автономного роботизированного комплекса 1 связаны с компрессорами 8, либо в полуавтономном варианте исполнения связаны с внешним источником давления через многоканальный кабель 9. Внутренние герметичные камеры 5 и 6 выполнены сегментированными для герметичного прижатия эластичных элементов 2 и 3 к внутренней поверхности трубопровода в случае существенных дефектов формы последнего, например из-за отложений или коррозии. В случае полуавтономного варианта реализации роботизированного комплекса 1, многоканальный кабель 9 передает как управляющие команды на роботизированный комплекс, так и необходимые компоненты для осуществления предварительной очистки и ремонта поврежденного участка трубопровода, а также может подавать дополнительную энергию на роботизированный комплекс 1. Для расширения диапазона возможных применений роботизированный комплекс 1 целесообразно реализовать в автономном варианте, но предусмотреть возможность подключения к внешнему управлению, энергообеспечению и снабжению. Средства инспекции 10 и ремонта 11 расположены с внешней стороны гибкого патрубка 4. Внутри эластичного элемента 3 установлена помпа 12, имеющая возможность как подачи жидкости в пространство между эластичными элементами 2 и 3 и гибким патрубком 4, так и откачивания жидкости оттуда.
Вариант комплектации роботизированного комплекса 1 выбирается исходя из стоящей перед ним задачи: в случае необходимости только инспекции с небольшим возможным ремонтом используется автономный вариант, в случае необходимости крупного ремонта большого участка трубопровода целесообразно применять полуавтономный вариант, что связано с необходимостью подачи большого объема компонентов для восстановления поверхности трубопровода.
Такая конфигурация устройства для инспекции и ремонта трубопроводов характерна для работы в условиях частично заполненных жидкостью трубопроводах, например канализационных. Для работы в трубопроводах другого типа, например в газопроводах, с полностью газообразным внутренним наполнением, характерно некоторое изменение геометрических размеров эластичных элементов 2 и 3 с внутренними камерами 5 и 6 в сторону увеличения. В таком случае движение роботизированного комплекса 1 в трубопроводе осуществляется за счет парусности эластичных элементов 2 и 3 и образования газовой подушки между внутренней поверхностью трубопровода и эластичными элементами 2 и 3.
Способ инспекции и контроля трубопроводов осуществляется следующим образом: помещают роботизированный комплекс 1 в участок трубопровода, подлежащий инспекции и/или ремонту через соответствующий колодец или шлюз, в зависимости от типа трубопровода, причем благодаря конструктивному решению роботизированный комплекс 1 может быть уменьшен в размерах для прохождения узостей при размещении.
Затем выбирают заполнение внутренних камер 5 и 6 эластичных элементов 2 и 3 таким образом, чтобы при существующей заполненности ремонтируемого трубопровода роботизированный комплекс 1 обладал положительной плавучестью и мог перемещаться свободно, используя энергию потока в трубопроводе. Затем роботизированный комплекс 1 самостоятельно своими датчиками инспекции 10 обнаруживает зону, требующую инспекции и/или ремонта, и принимает решение остановиться в этой зоне. Также с помощью внешнего управления через многоканальный кабель 9 может быть подана команда на закрепление в нужной зоне трубопровода. Тогда наполняют камеры 5 и 6 эластичных элементов 2 и 3 так, чтобы эластичные элементы 2 и 3 герметично прижались к внутренней поверхности трубопровода. Причем в случае, если наполнение эластичного элемента 2 происходит достаточно быстро благодаря аккумуляторам давления 7, то закрепление всего роботизированного комплекса 1 происходит в нужной зоне. Тогда сначала фиксируют роботизированный комплекс 1 в трубопроводе только с помощью эластичного элемента 2 и ожидают пока жидкость, находящаяся между элементами 2 и 3, не стечет благодаря естественному уклону трубопровода, и затем надувают эластичный элемент 3, полностью изолируя зону инспекции ремонта от потока. Оставшуюся жидкость и жидкость, использованную для промыва ремонтируемой зоны, удаляют из нее с помощью помпы 12. При этом поток повышает уровень жидкости перед эластичным элементом 2 (см. фиг.2) до тех пор, пока не начинает течь сквозь гибкий патрубок 4. После того как зона ремонта надежно изолирована от потока, переходят к детальной инспекции и ремонту поврежденных участков трубопровода, расположенных между эластичными элементами 2 и 3. После того, как ремонт данного участка закончен, частично сдувают внутренние камеры 5 и 6 эластичных элементов 2 и 3 и роботизированный комплекс 1 снова начинает движение вместе с потоком к следующему участку, требующему инспекции и ремонта. В случае если невозможно быстро закрепиться около необходимого участка и роботизированный комплекс 1 закрепляется дальше по потоку от требуемого положения, используется процедура движения «шаг назад» (см. фиг 3-9), заключающаяся в том, что сначала закрепляют роботизированный комплекс 1 путем наддува эластичного элемента 3, затем удлиняют гибкий патрубок 4, затем надувают эластичный элемент 2, затем частично сдувают эластичный элемент 3 и укорачивают гибкий патрубок 4, затем снова надувают эластичный элемент 3. Таким образом происходит перемещение роботизированного комплекса 1 против движения потока.
Таким образом, благодаря устройству роботизированного комплекса, а также способу его применения для инспекции и ремонта трубопроводов, получен технический результат, а именно обеспечена возможность перемещения, инспекции и ремонта трубопроводов без остановки их эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВВЕДЕНИЯ ПЛЕТИ ПЛАСТМАССОВЫХ ТРУБ В ВОССТАНАВЛИВАЕМЫЙ НЕГЕРМЕТИЧНЫЙ ТРУБОПРОВОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2319059C2 |
| ПОДВОДНЫЙ КОМПЛЕКС ДЛЯ РЕМОНТА ПОДВОДНЫХ ТРУБОПРОВОДОВ | 2011 |
|
RU2481438C2 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2418234C1 |
| СПОСОБ РЕМОНТА ТРУБОПРОВОДОВ | 1999 |
|
RU2179278C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕКРЫТИЯ ДЕЙСТВУЮЩЕГО ТРУБОПРОВОДА ПРИ РЕМОНТЕ | 1999 |
|
RU2160408C1 |
| СПОСОБ РЕМОНТА ПРЕИМУЩЕСТВЕННО ПРОТЯЖЕННОГО НЕПРЯМОЛИНЕЙНОГО ТРУБОПРОВОДА | 2006 |
|
RU2339864C2 |
| Мобильный роботизированный кессон | 2018 |
|
RU2688624C1 |
| СПОСОБ РЕМОНТА ЛИНЕЙНОГО УЧАСТКА ТРУБОПРОВОДА | 2005 |
|
RU2292512C1 |
| СПОСОБ МОНТАЖА НОВОЙ ТРУБЫ ВНУТРИ СУЩЕСТВУЮЩЕГО ТРУБОПРОВОДА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ УСТРАНЕНИЯ ОТРЕЗА НОВОЙ ТРУБЫ | 1989 |
|
RU2025635C1 |
| УСТРОЙСТВО ДЛЯ ЛОКАЛЬНОЙ ОБЛИЦОВКИ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБОПРОВОДА | 1999 |
|
RU2172446C1 |
Изобретение относится к трубопроводному транспорту и может использоваться при бестраншейной и безостановочной технологии ремонта трубопроводов различного назначения. Устройство для осуществления способа инспекции и ремонта трубопроводов, представляющее собой роботизированный комплекс, содержит средства перемещения, крепления, инспекции и ремонта участков трубопровода, при этом комплекс снабжен способностью перемещаться энергией потока в трубопроводе за счет двух тороидальных эластичных элементов, расположенных на роботизированном комплексе спереди и сзади по ходу потока, и имеет герметично связанный с тороидальными эластичными элементами гибкий патрубок. Устройство помещают в трубопровод и перемещают в нем до обнаружения поврежденного участка, закрепляют его около поврежденного участка и проводят ремонтные операции, при этом устройство снабжают способностью передвижения в потоке трубопровода с использованием энергии потока, герметично изолируют область поврежденного участка распиранием эластичных элементов устройства, которые располагают по внешней границе поврежденного, ремонтируемого участка, а поток направляют через временный трубопровод, образованный с помощью устройства. Технический результат: возможность инспекции и ремонта трубопроводов без остановки их эксплуатации. 2 н. и 11 з.п. ф-лы, 9 ил.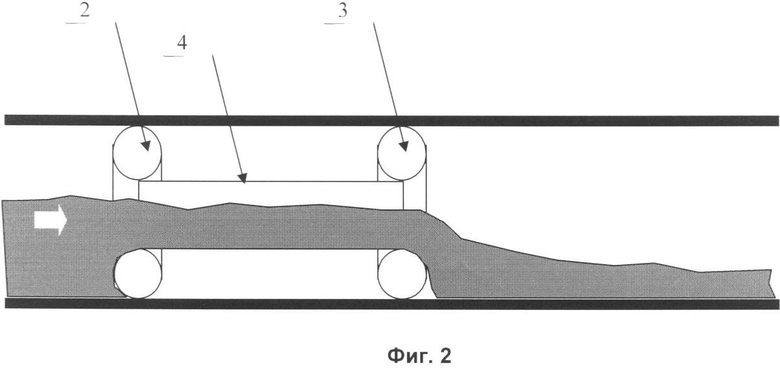
1. Способ инспекции и ремонта трубопроводов, заключающийся в том, что устройство для инспекции и ремонта помещают в трубопровод и перемещают в нем до обнаружения поврежденного участка, закрепляют его около поврежденного участка и проводят ремонтные операции, отличающийся тем, что устройство для инспекции и ремонта снабжают способностью передвижения в потоке трубопровода с использованием энергии потока, герметично изолируют область поврежденного участка распиранием эластичных элементов устройства, которые располагают по внешней границе поврежденного, ремонтируемого участка, а поток направляют через временный трубопровод, образованный с помощью устройства.
2. Способ по п.1, отличающийся тем, что распирание эластичных элементов устройства осуществляют путем наддува камер эластичных элементов.
3. Способ по п.2, отличающийся тем, что закрепление устройства около поврежденного участка осуществляют распиранием сначала заднего по ходу потока эластичного элемента устройства, а затем распиранием переднего по ходу потока эластичного элемента устройства.
4. Способ по п.2, отличающийся тем, что закрепление устройства около поврежденного участка осуществляют тем, что сначала распирают передний по ходу потока эластичный элемент устройства, затем удлиняют временный трубопровод, затем распирают задний по ходу потока эластичный элемент устройства, затем сдувают передний по ходу потока эластичный элемент устройства, затем укорачивают временный трубопровод, затем снова распирают передний по ходу потока эластичный элемент устройства.
5. Устройство для осуществления способа инспекции и ремонта трубопроводов, представляющее собой роботизированный комплекс, снабженный средствами перемещения, крепления, инспекции и ремонта участков трубопровода, отличающийся тем, что комплекс снабжен способностью перемещаться энергией потока в трубопроводе за счет двух тороидальных эластичных элементов, расположенных на роботизированном комплексе спереди и сзади по ходу потока, и содержит герметично связанный с тороидальными эластичными элементами гибкий патрубок.
6. Устройство по п.5, отличающееся тем, что средства для инспекции и ремонта участков трубопровода расположены на внешней поверхности гибкого патрубка.
7. Устройство по п.5, отличающееся тем, что тороидальные эластичные элементы снабжены надуваемыми камерами.
8. Устройство по п.5, отличающееся тем, что роботизированный комплекс соединен с источником энергопитания через свободновисящий кабель.
9. Устройство по п.5, отличающееся тем, что роботизированный комплекс соединен с пультом управления через свободновисящий кабель.
10. Устройство по п.8 или 9, отличающееся тем, что роботизированный комплекс соединен с пультом управления и источником энергопитания единым свободновисящим кабелем.
11. Устройство по п.5, отличающееся тем, что роботизированный комплекс снабжен аккумуляторами энергии.
12. Устройство по п.5, отличающееся тем, что роботизированный комплекс снабжен устройством автономного управления.
13. Устройство по п.5, отличающееся тем, что эластичные элементы роботизированного комплекса выполнены с сегментированными надуваемыми камерами в зоне контакта с внутренней поверхностью трубопровода.
| УСТРОЙСТВО ДЛЯ ПЕРЕКРЫТИЯ ТРУБОПРОВОДА | 2002 |
|
RU2220362C1 |
| Устройство для устранения утечки в трубопроводе | 1977 |
|
SU653480A1 |
| Устройство для устранения течи в действующем трубопроводе | 1984 |
|
SU1222974A1 |
| УСТРОЙСТВО ДЛЯ ОСМОТРА И РЕМОНТА ТРУБОПРОВОДОВ | 2007 |
|
RU2334157C1 |
| Доильный аппарат | 1985 |
|
SU1335206A1 |
| US 7303010 В2, 04.12.2007. | |||

