Изобретение относится к устройствам, предназначенным для выполнения подводно-технических работ, а именно к мобильным роботизированным кессонам. В ходе развития морской техники появились различные кессоны, позволяющие производить подводно-технические работы.
Известен кессон для производства работ на корпусе судна ниже ватерлинии (патент SU 437657), содержащий обшивку, выполненную в виде оболочки из эластичного материала и силовой несущий набор, который выполнен в виде надувных продольных труб и трубчатых арочных шпангоутов из эластичного материала, соединенных посредством гибких трубопроводов с источником сжатого воздуха, причем уплотнительные дорожки из пористого материала закреплены на уплотнительных языках, армированных надувными эластичными трубами.
Данный кессон необходимо прижимать к горизонтальному участку днища судна подкильными концами. При этом дополнительной прижимной силой выступает сила Архимеда. Таким образом, самоприсоединение кессона невозможно.
Известен кессон для ремонта судов (патент SU 685551), содержащий силовой каркас, выполненный из продольного и поперечного наборов, которые соединены между собой подвижно и охватываются эластичной оболочкой, и уплотнение, которое выполнено в виде шланга и расположено по периметру силового каркаса.
Данный кессон для ремонта судов необходимо прижимать к горизонтальному участку днища судна подкильными концами. При этом дополнительной прижимной силой выступает сила Архимеда. Таким образом, самоприсоединение кессона невозможно.
Наиболее близким к заявляемому устройству является кессон для выполнения работ на подводной части корпусов плавсредств (патент SU 1008084), содержащий незамкнутую сверху камеру, верхние края которой по периметру снабжены уплотняющим трубчатым элементом, балластные отсеки, размещенные на боковых стенках камеры, устройство для регулирования плавучести, систему вентиляции, трубопровод для подачи в камеру сжатого воздуха и кабель электропитания, а также ряд надувных пневмоколес, регулируемых по внутреннему давлению, снабженных приводом их вращения для поступательного перемещения кессона по днищу обслуживаемого плавсредства и размещенных сверху на вышеуказанной камере.
Данный кессон для выполнения работ на подводной части корпусов плавсредств возможно прижимать к горизонтальному участку днища судна, имеющему малые углы, только лишь силой Архимеда, Таким образом, надежное самоприсоединение кессона невозможно. В случае присоединения указанного кессона к борту судна, который, как правило, имеет большой угол наклона, сила Архимеда будет способствовать всплытию кессона, а герметизация полости, образованной кессоном и корпусом судна, будет нарушена.
Целью заявляемого изобретения является расширение диапазона углов наклона поверхности объекта, к которой возможно самоприсоединение мобильного роботизированного кессона.
Предлагаемый мобильный роботизированный кессон включает незамкнутую камеру, край которой снабжен уплотняющим элементом, устройство для регулирования плавучести, движитель. Устройство для регулирования плавучести дополнительно снабжено по меньшей мере одним управляемым клапаном, установленным на поверхности незамкнутой камеры. Уплотняющий элемент и устройство для регулирования плавучести представляют собой гибкую оболочку, разделенную на многосредные элементы с изменяемой формой, причем в стенках многосредных элементов гибкой оболочки расположены управляемые клапаны. Мобильный роботизированный кессон также содержит систему управления и по меньшей мере один источник энергии.
Мобильный роботизированный кессон может содержать средства подключения внешних источников энергии и двусторонних каналов передачи информации.
К внешней поверхности незамкнутой камеры мобильного роботизированного кессона может быть прикреплена управляемая лебедка с устройством захвата троса.
Дальний от незамкнутой камеры край гибкой оболочки мобильного роботизированного кессона может быть снабжен гибкой юбкой.
Движитель мобильного роботизированного кессона может представлять собой водомет.
Таким образом, получен технический результат, а именно: расширен диапазон углов наклона поверхности объекта, к которой возможно самоприсоединение кессона.
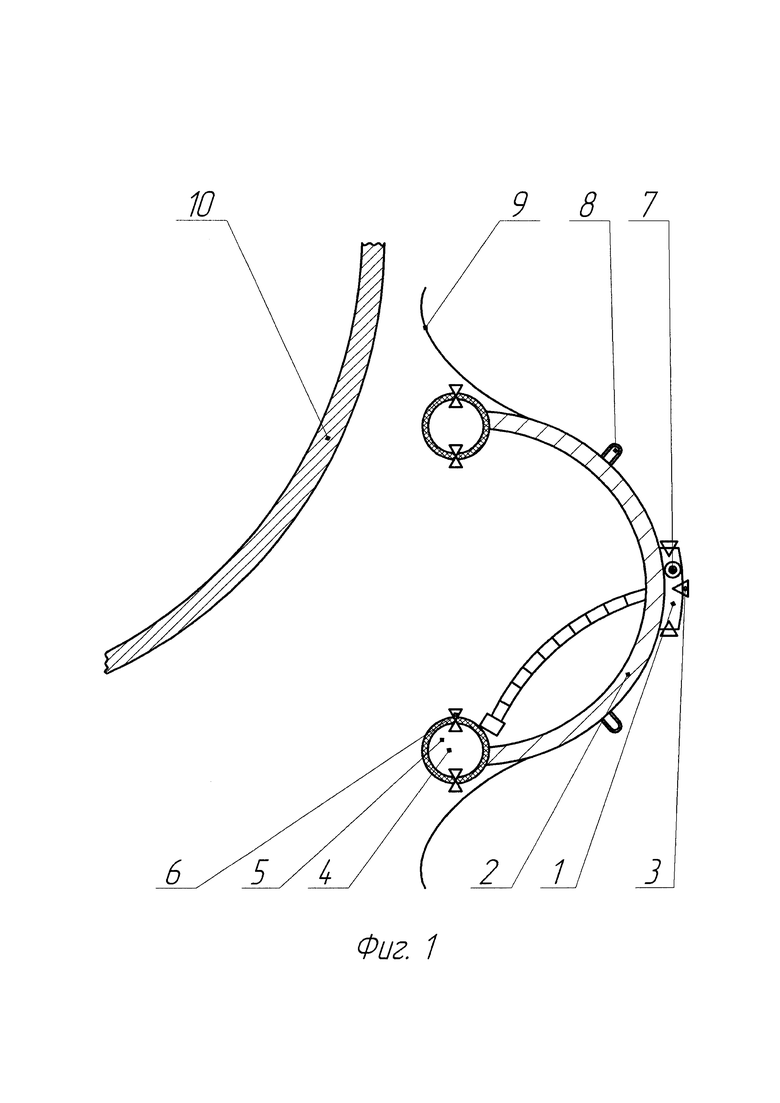
На Фиг. 1 изображен мобильный роботизированный кессон в отсоединенном положении (вид сбоку).
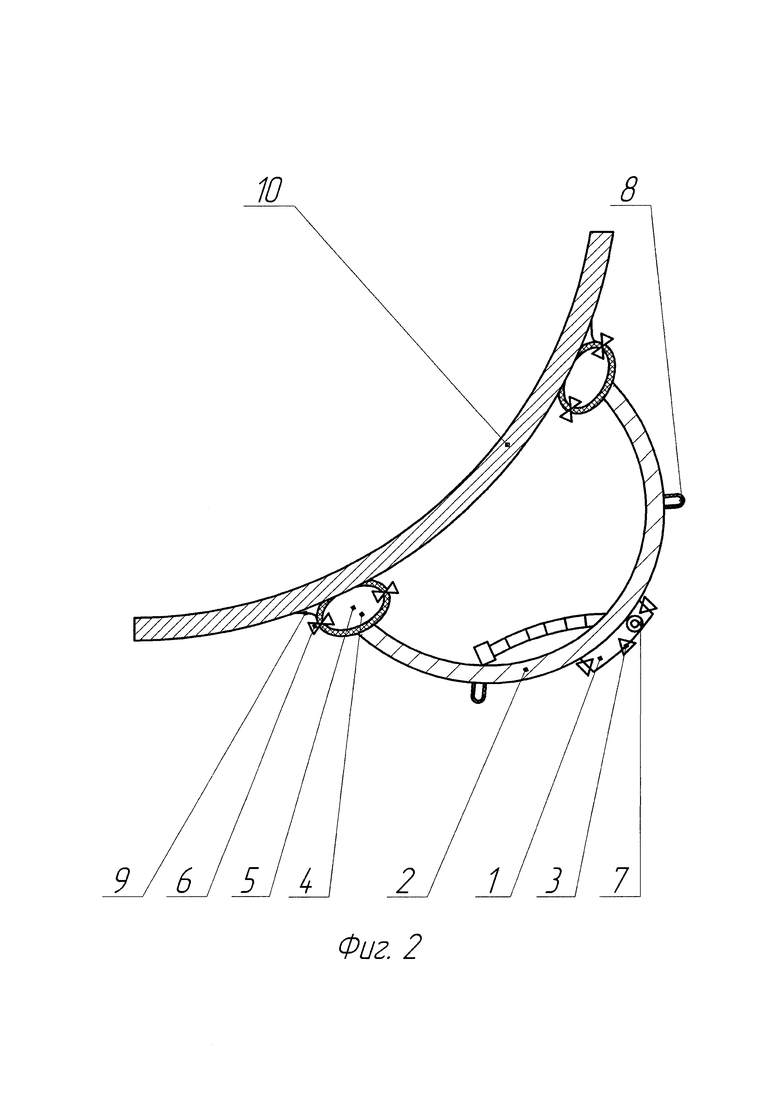
На Фиг. 2 изображен мобильный роботизированный кессон на поверхности объекта (вид сбоку).
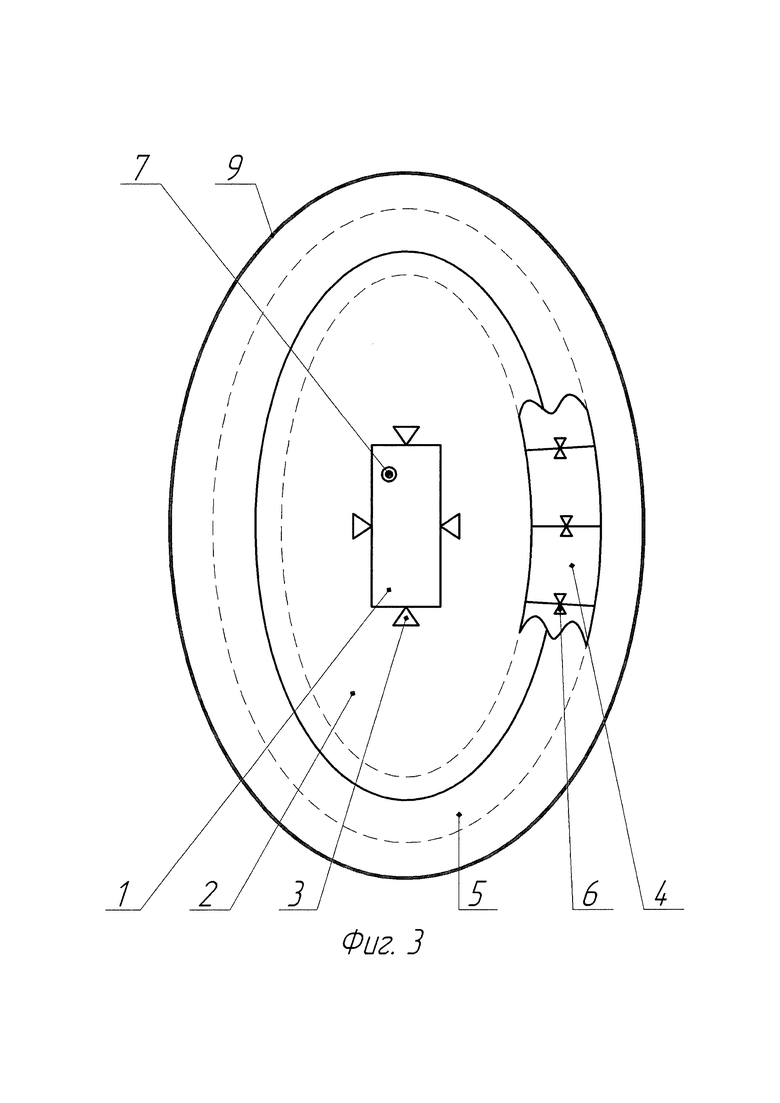
На Фиг. 3 изображен мобильный роботизированный кессон (вид сверху).
Заявляемое изобретение включает: по меньшей мере один источник энергии, в частности источники электро- и пневмоэнергии; движитель 1 (см. Фиг. 1); систему управления; незамкнутую камеру 2, край которой снабжен уплотняющим элементом, и устройство для регулирования плавучести. Устройство для регулирования плавучести снабжено по меньшей мере одним управляемым клапаном 3, установленным на поверхности незамкнутой камеры 2. Уплотняющий элемент и устройство для регулирования плавучести представляют собой разделенную на многосредные элементы 4 гибкую оболочку 5 с изменяемой формой. Управляемые клапаны 6 (см. Фиг. 3) расположены в стенках указанных многосредных элементов 4 гибкой оболочки 5, а именно: в перегородках между многосредными элементами 4, во внешних и внутренних стенках - по необходимости, контактирующих, соответственно, с внешней и внутренней средами мобильного роботизированного кессона (далее по тексту - МРК). В многосредные элементы 4 возможно осуществлять подачу различных сред, в частности воздух или воду, через единую систему распределения.
Возможно также наличие следующих дополнительных конструктивных элементов у МРК:
- для повышения энергетической вооруженности МРК дополнительно содержит стандартные средства подключения 7 внешних источников энергии и двусторонних каналов передачи информации;
- дополнительно к внешней поверхности незамкнутой камеры 2 мобильного роботизированного кессона прикреплена управляемая лебедка с устройством захвата троса 8. Данное устройство позволяет в случае плохих погодных и/или гидродинамических условий или нештатных ситуаций обеспечить доставку МРК в воду, его перемещение в воде и страховку в процессе работы;
- дополнительно содержит гибкую юбку 9, соединенную с дальним от незамкнутой камеры 2 краем гибкой оболочки 5 мобильного роботизированного кессона. Зачастую, поверхность объектов 10, к которым присоединяют кессоны, имеет неровности или загрязнения, вследствие чего гибкая оболочка 5 не всегда может достаточно плотно прилегать к поверхности объекта 10.
- движитель 1 мобильного роботизированного кессона представляет собой водомет. Водомет, по сравнению с винтами, позволяет оперативно изменять направление вектора тяги, обеспечивая тем самым более высокие маневровые характеристики МРК, особенно в ограниченном пространстве. Кроме того, винты часто выходят из строя по причине намотки на вал винта различных органических и неорганических волокон. Водомет лишен данного недостатка. Также возможно создание управляющего момента путем стравливания различных сред, в частности воздуха или воды, из управляемых клапанов 6 многосредных элементов 4 гибкой оболочки 5.
Устройство работает следующим образом. Сначала производят доставку МРК к объекту 10 выполнения работ (см. Фиг. 2). Для этого через единую систему распределения и управляемые клапаны 6 подают предварительно отфильтрованную среду или среды в многосредные элементы 4 гибкой оболочки 5, таким образом, чтобы обеспечить затопление МРК и придание ему нейтральной плавучести. Многосредные элементы 4 при этом изменяют форму управляемо для последующей фиксации МРК на поверхности объекта 10. Далее с помощью движителя и/или управляемых клапанов 6, контактирующих с внешней средой МРК, приводят в движение МРК, ориентируют его в указанной среде и обеспечивают его требуемое позиционирование на поверхности объекта 10. Затем с помощью системы управления обеспечивают заполнение многосредных элементов 4 средой или средами и перемещение среды или сред между многосредными элементами 4 таким образом, чтобы придать гибкой оболочке 5 форму, повторяющую форму поверхности объекта 10 в месте присоединения и необходимую для плотного прилегания к поверхности объекта 10. Откачивают внутреннюю среду МРК, при необходимости перекачивая часть указанной среды в многосредные элементы 4, добиваясь прижатия МРК в требуемом положении с заданным усилием и распределением усилия по контактирующей поверхности и плотного прилегания гибкой оболочки 5 к поверхности объекта 10, что необходимо в том числе при наклонном положении МРК. При этом гибкая юбка 9 становится дополнительным уплотняющим элементом, препятствующим поступлению воды в пространство между поверхностью объекта 10 и гибкой оболочкой 5 мобильного роботизированного кессона, за счет того, что под действием давления воды указанная гибкая юбка 9 изменяет свою форму таким образом, что происходит «засасывание» ее свободного края в районы возникновения неплотности. Это увеличивает силу трения, необходимую для надежной фиксации МРК. Длина и жесткость гибкой юбки 9 выбирается в зависимости от дефектов формы поверхности объекта 10. МРК позволяет провести требуемые работы с необходимой внутренней средой мобильного роботизированного кессона. Если необходимо провести какие-либо работы на другом участке поверхности объекта 10, в пространство между незамкнутой камерой 2 мобильного роботизированного кессона и поверхностью объекта 10 подают среду (например, сжатый воздух). Прижимная сила уменьшается. Часть указанной среды при этом попадает во внешнюю среду через пространство между гибкой оболочкой 5, гибкой юбкой 9 мобильного роботизированного кессона и поверхностью объекта 10. Затем система управления подает команду на включение водомета - среда и/или среды (например, вода и/или сжатый воздух) истекают из по меньшей мере одного управляемого клапана 6, благодаря чему МРК перемещается в требуемую позицию. При необходимости параллельно операции подачи среды (например, сжатого воздуха) в пространство между незамкнутой камерой 2 мобильного роботизированного кессона и поверхностью объекта 10 в многосредные элементы 4 подают среду или среды (например, воду), что компенсирует силу Архимеда, не давая МРК всплыть.
Таким образом, МРК выгодно отличается от представленных аналогов и прототипа, являясь уникальным в своем роде. МРК возможно присоединять не только к горизонтальным поверхностям объектов 10, но и к поверхностям объектов 10, расположенным под различными углами к горизонту, а также имеющим криволинейную форму, неровности и загрязнения. При этом отсутствует строгая необходимость прижимать МРК к поверхности объекта 10 подкильными концами, так как самоприсоединение МРК происходит за счет разницы давлений внутренней и внешней среды МРК.
В случае плохих погодных и/или гидродинамических условий или нештатных ситуаций доставку МРК в воду, его перемещение в воде и страховку в процессе работы обеспечивают с помощью управляемой лебедки с устройством захвата троса 8.
Для повышения энергетической вооруженности МРК может дополнительно содержать стандартные средства подключения 7 внешних источников энергии и двусторонних каналов передачи информации, что позволяет подавать извне на борт МРК электроэнергию, а также среду или среды (например, воду и сжатый воздух), необходимые, например, для: 1) перемещения МРК; 2) выполнения требуемых работ мобильным роботизированным кессоном и т.д. При этом возможно преобразовывать один вид энергии в другой - например, пневмо- в электроэнергию - непосредственно на борту МРК.
Таким образом, получен технический результат, а именно: расширен диапазон углов наклона поверхности объекта, к которой возможно самоприсоединение мобильного роботизированного кессона.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| КОМПЛЕКТ СРЕДСТВ ПЛАВУЧЕГО СПАСАТЕЛЬНОГО УСТРОЙСТВА С МАЛЫМИ ИМПЕЛЛЕРАМИ НА СЖАТОМ ПНЕВМОПОТОКЕ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2019 |
|
RU2718508C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| Автономный мобильный многофункциональный роботизированный комплекс | 2017 |
|
RU2722301C1 |
| Автономный мобильный робототехнический комплекс | 2016 |
|
RU2632342C1 |
| СПОСОБ СПАСЕНИЯ И ПОДЪЕМА СУДОВ И КОМПЛЕКС СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2299831C2 |
| БЫСТРОРАЗВЕРТЫВАЕМЫЙ КОМПЛЕКС ПОИСКА ЗАТОНУВШИХ ОБЪЕКТОВ | 2020 |
|
RU2746060C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПЛАВУЧИМ СПАСАТЕЛЬНЫМ УСТРОЙСТВОМ С МАЛЫМИ ИМПЕЛЛЕРАМИ НА СЖАТОМ ПНЕВМОПОТОКЕ НА ДИСТАНЦИОННОМ УПРАВЛЕНИИ | 2019 |
|
RU2718826C1 |
| СПОСОБ ДВИЖЕНИЯ НА ВОДЕ И СКОРОСТНОЕ СУДНО ДЛЯ ДВИЖЕНИЯ НА ВОДЕ НА ВЕКТОРАХ УПОРОВ ВОДНЫХ ДВИЖИТЕЛЕЙ (ВАРИАНТЫ) | 2007 |
|
RU2364544C2 |
| УНИВЕРСАЛЬНЫЙ СУДОВОЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ЗАЩИЩЕННОСТИ | 2013 |
|
RU2523862C1 |
Изобретение относится к устройствам, предназначенным для выполнения подводно-технических работ, а именно к мобильным роботизированным кессонам. Предлагаемый мобильный роботизированный кессон включает незамкнутую камеру, край которой снабжен уплотняющим элементом, устройство для регулирования плавучести, движитель. Устройство для регулирования плавучести дополнительно снабжено по меньшей мере одним управляемым клапаном, установленным на поверхности незамкнутой камеры. Уплотняющий элемент и устройство для регулирования плавучести представляют собой гибкую оболочку, разделенную на многосредные элементы с изменяемой формой, причем в стенках многосредных элементов гибкой оболочки расположены управляемые клапаны. Мобильный роботизированный кессон также содержит систему управления и по меньшей мере один источник энергии. Технический результат заключается в расширении диапазона углов наклона поверхности объекта, к которой возможно самоприсоединение мобильного роботизированного кессона. 4 з.п. ф-лы, 3 ил.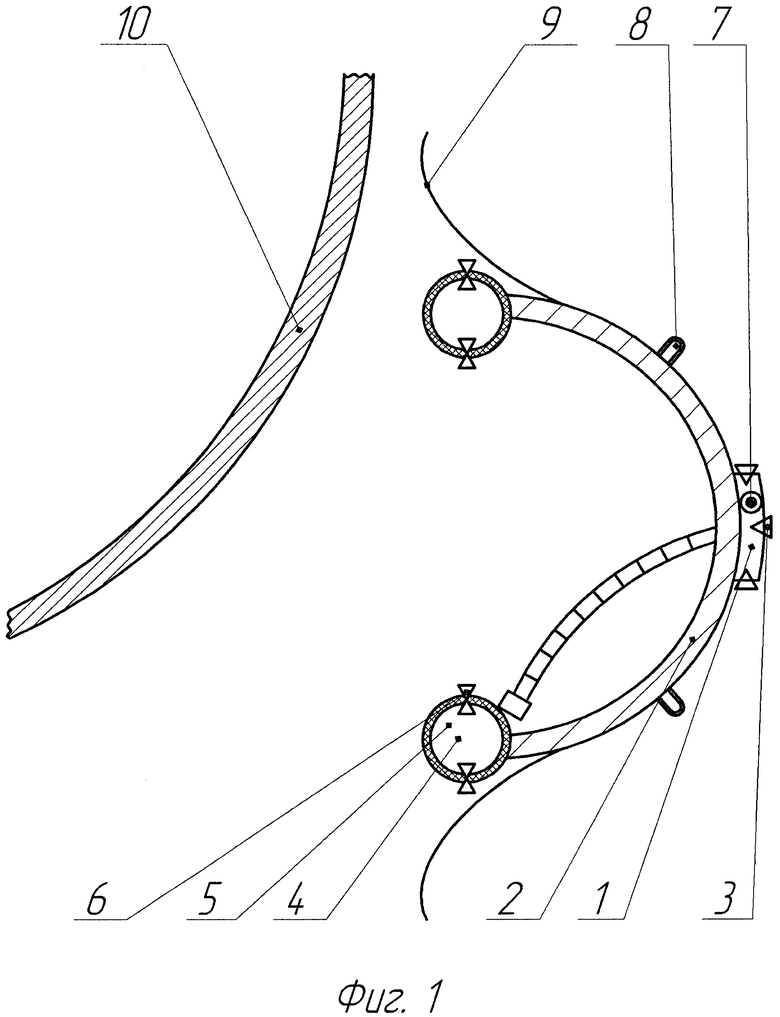
1. Мобильный роботизированный кессон, включающий незамкнутую камеру, край которой снабжен уплотняющим элементом, устройство для регулирования плавучести, движитель, отличающийся тем, что устройство для регулирования плавучести дополнительно снабжено по меньшей мере одним управляемым клапаном, установленным на поверхности незамкнутой камеры, уплотняющий элемент и устройство для регулирования плавучести представляют собой гибкую оболочку, разделенную на многосредные элементы с изменяемой формой, причем в стенках многосредных элементов гибкой оболочки расположены управляемые клапаны, мобильный роботизированный кессон также содержит систему управления и по меньшей мере один источник энергии.
2. Мобильный роботизированный кессон по п. 1, отличающийся тем, что содержит средства подключения внешних источников энергии и двусторонних каналов передачи информации.
3. Мобильный роботизированный кессон по п. 1, отличающийся тем, что к внешней поверхности незамкнутой камеры прикреплена управляемая лебедка с устройством захвата троса.
4. Мобильный роботизированный кессон по п. 1, отличающийся тем, что дальний от незамкнутой камеры край гибкой оболочки снабжен гибкой юбкой.
5. Мобильный роботизированный кессон по п. 1, отличающийся тем, что движитель представляет собой водомет.
| Кессон для выполнения работ на подводной части корпусов плавсредств | 1982 |
|
SU1008084A1 |
| US 4288176 A, 08.09.1981 | |||
| Устройство для очистки рабочего раствора | 1984 |
|
SU1221773A1 |
| Кессон для ремонта судов | 1974 |
|
SU685551A1 |
| Кессон | 1971 |
|
SU437657A1 |
| Кессон | 1981 |
|
SU1049351A1 |
| US 4626128 A, 02.12.1986. | |||

