Изобретение относится к судостроению и предназначено для стабилизации по крену и/или дифференту глиссирующих и водоизмещающих судов с крейсерской скоростью не менее 15 км/ч (иначе площадь исполнительного элемента становится слишком большой) и длиной не более пяти длин волн на данной акватории (суда большей длины почти не нуждаются в стабилизации). Система уменьшает дифферент при выходе на глиссирование. В штормовых условиях система может выполнять обратную функцию по дифференту - облегчать вход на волну. При соответствующем переключении система может выполнять и обратную функцию по крену - на спокойной воде она может частично компенсировать вес смещаемого на борт груза, например пассажиров на экскурсионном теплоходе, или крен от поворота.
Известны системы компенсации крена (см. пат. России 2059518), однако все они требуют постороннего источника энергии, а также сложны и дороги.
Сущность изобретения в том, что для привода исполнительного элемента стабилизации (далее ИЭС) используется энергия волн, в которые входит движущееся судно. Энергия воспринимается чувствительным элементом (далее ЧЭ).
Вариант 1. Для этого судно имеет в носу и/или по борту расположенный выше динамической ватерлинии подвижно закрепленный ЧЭ в виде гидродинамической поверхности или поплавка. Перемещение этого элемента под действием волн через кинематическую связь в виде системы тросов, тяг, шкивов, блоков, двуплечих рычагов, переключаемых муфт и быстросъемных креплений передается на ИЭС, которым может быть отклоняемая транцевая плита, триммеры различной конструкции, горизонтальные водяные или воздушные (для судов со скоростью более 80 км/ч) рули или управляемые подводные крылья.
Указанные элементы кинематической связи осуществляют последовательную передачу и изменение направления усилий от ЧЭ к ИЭС и, возможно, разветвление усилий (от одного ЧЭ к двум-трем ИЭС) по обычным для классической механики правилам (см. «Детали машин», Крайнев А.Ф., М.: Машиностроение, стр.71, 94, 108, 138; или Ортобалевский И.И. «Механизмы в современной технике», М.: Наука, 1979, том 1, стр.134, том 2, стр.238, том 5, стр.182).
Для регулирования степени стабилизации и для настройки системы кинематическая связь может иметь переменное передаточное отношение, то есть изменяемое соотношение перемещения ЧЭ к перемещению ИЭС, и изменяемое взаимодействие ЧЭ и ИЭС, например переменное место крепления элемента кинематической связи (тяга, трос) на транцевой плите. Или может иметь рычаг горизонтального руля с несколькими крепежными отверстиями на разных радиусах или двуплечий рычаг с отверстиями на разных радиусах, причем на обоих плечах рычага, и т.п.
Перемещение ЧЭ во многих случаях будет парироваться усилием, возникающим на ИЭС (по крайней мере, они должны быть соответствующим образом подобраны, подобраны формы и профили ЧЭ). Однако в некоторых случаях, в частности как регулировка степени стабилизации, может потребоваться подпружинивание ЧЭ относительно корпуса для предупреждения его ударов о корпус судна. Подпружинивание может быть регулируемым, например эластичная пневмоемкость.
Вариант 2. Для судов, движущихся со скоростью 35-40 км/ч, возможен другой вариант приведения в действие ИЭС - от гидродинамического давления набегающей воды. Для этого судно в носу или на скуле выше динамической ватерлинии имеет отверстие, соединенное трубой с водяным гидроцилиндром, сильфоном или мембранной полостью, которые соединены кинематической связью с ИЭС.
При этом способе передается сравнительно небольшая энергия и на очень короткое время, поэтому ИЭС должен потреблять очень мало энергии и быть малоинерционным, например триммер, поперечный потоку воды, в крайнем случае - поворотный малого радиуса.
Трубы, передающее давление воды, должны быть сравнительно большого диаметра и почти прямые и во время движения постоянно иметь уклон назад, чтобы в них постоянно была вода.
Степень стабилизации в этом случае, как и в первом варианте, зависит от величины волны (давление остается постоянным, но меняется время его воздействия). Но если эта зависимость окажется недостаточной, можно сделать выше основного отверстия еще одно или два меньшего диаметра или сделать отверстие каплевидной или грушевидной формы. В этом случае при входе в небольшую волну нижнего (двух нижних) отверстия часть давления сбрасывается через два верхних (верхнее), а при входе в большую волну всех трех отверстий стабилизация максимальна.
Для получения большей энергии и для повышения быстродействия системы отверстие или щель могут иметь сужающуюся воронкообразную форму. Однако не стоит делать раструб слишком широким, иначе при входе в волну будут слышны шлепки и повысится сопротивление движению.
Бурун перед носом водоизмещающего судна не будет оказывать заметного воздействия на такую систему стабилизации, так как вода в буруне движется в основном снизу вверх и не будет оказывать большого продольного гидродинамического давления. К тому же небольшое давление буруна будет учитываться (должно учитываться) при расчете и настройке системы (например, при выборе диаметра гидроцилиндра и взаимодействии его штока с триммером). На глиссирующих судах при движении по ровной воде отверстие все время находится выше динамической ватерлинии.
Вариант 3. Чувствительным элементом может являться подпружиненный относительно корпуса судна массивный предмет (груз), расположенный как можно ближе к носу (к борту) судна (например, аккумулятор или неприкосновенный запас топлива). Перемещение этого предмета под действием перегрузок через кинематическую связь передается на ИЭС.
Этот способ принципиально не может устранить колебания полностью, но при хорошей настройке системы может уменьшить их до десяти раз, что является достаточно хорошим результатом.
Как и во втором варианте, передаваемая энергия очень небольшая, и здесь также необходим хорошо сбалансированный (нейтральный по усилию) и малоинерционный ИЭС.
Получившаяся система автоматического регулирования является разновидностью систем прямого действия. Такие системы при отсутствии в ее цепи элементов, вызывающих задержку во времени, не склонны к возникновению автоколебаний. Однако если колебания все же будут слишком большими, то коэффициент регулирования такой системы рассчитывается по обычным для систем автоматики правилам (см. например «Теплотехнический справочник», М.: «Энергия», 1976, том 2, стр.753-758.) или подбирается экспериментально.
Конструкцию подвески груза желательно снабдить простейшим демпфером колебаний, например, в виде резинотканевой ленты, закрепленной с перегибом на 180 градусов в поперечном направлении, как подковообразный магнит. Еще лучше односторонним демпфером в виде открытого сверху вертикально расположенного гидроцилиндра с расположенным в нем с зазором частично-сферическим поршнем с одним клапаном, перепускающим жидкость при ходе груза вниз.
Этот вариант особенно хорошо подходит для дооборудования уже существующих судов, так как не требует размещения наружных элементов или внутренних герметичных труб, не требует герметичного ввода валов или штоков.
Вариант 4. Для судов со скоростью движения более 80 км/ч возможно использование в качестве ЧЭ аэродинамических флюгерных поверхностей. Чтобы кратковременные изменения вектора воздушной скорости при подскоке носа не влияли на работу флюгера, его лучше расположить как можно далее в корму или даже за ней. Флюгер может воздействовать на гидродинамический ИЭС. Но при таких скоростях судно иногда скачет по верхушкам волн, поэтому действие гидродинамического ИЭС может быть пульсирующим. Поэтому флюгер целесообразно использовать в комбинации с горизонтальным воздушным рулем.
Эта система стабилизирует судно только по дифференту, так как флюгер не реагирует на крен и боковое направление волны.
Флюгер и руль могут быть размещены раздельно, а могут быть объединены в одну поверхность путем соединения задней части флюгера с передней частью руля кулисным креплением. Такая поверхность, однако, нуждается в индивидуальном подборе, так как может проявлять склонность к автоколебаниям.
Достоинства этого варианта: плавность воздействия, нечувствительность к плавающим предметам, способность предотвращать переворачивание через корму скоростных катамаранов (в последнем случае флюгер и рули должны быть расположены по бокам - за пределами ветровой тени палубы).
Недостаток этого варианта - зависимость от ветра.
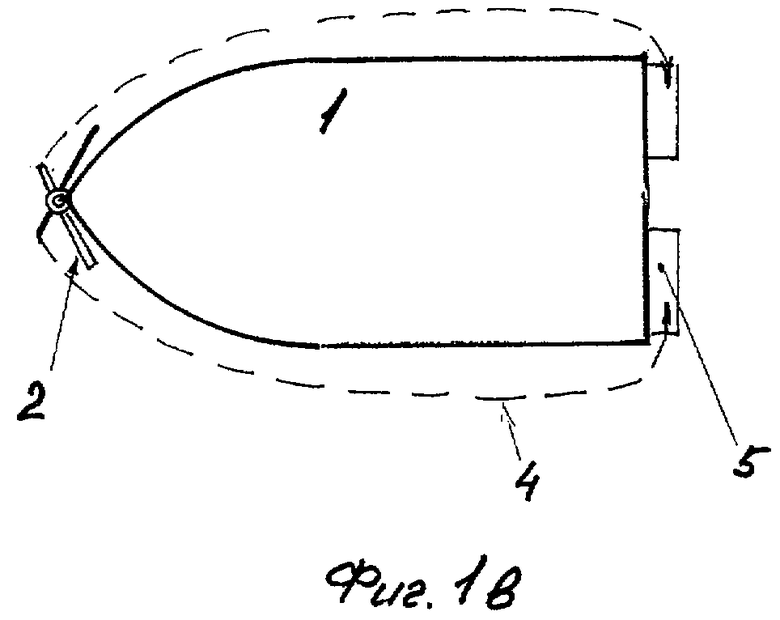
Первые три варианта системы могут стабилизировать судно по крену, по дифференту или по крену и дифференту. Для этого можно применить две отдельные системы, но лучше применить две системы, работающие диагонально, то есть левый ЧЭ воздействует на правый ИЭС и наоборот (см. фиг.1в). При некоторых типах обводов (например, сани Фокса) могут быть применены три системы, две из которых работают диагонально. Или все три системы работают перекрестно, например 3+2, то есть три ЧЭ воздействуют на два ИЭС, или 3+3, где каждый бортовой ЧЭ воздействует по диагонали и одновременно на центральный ИЭС.
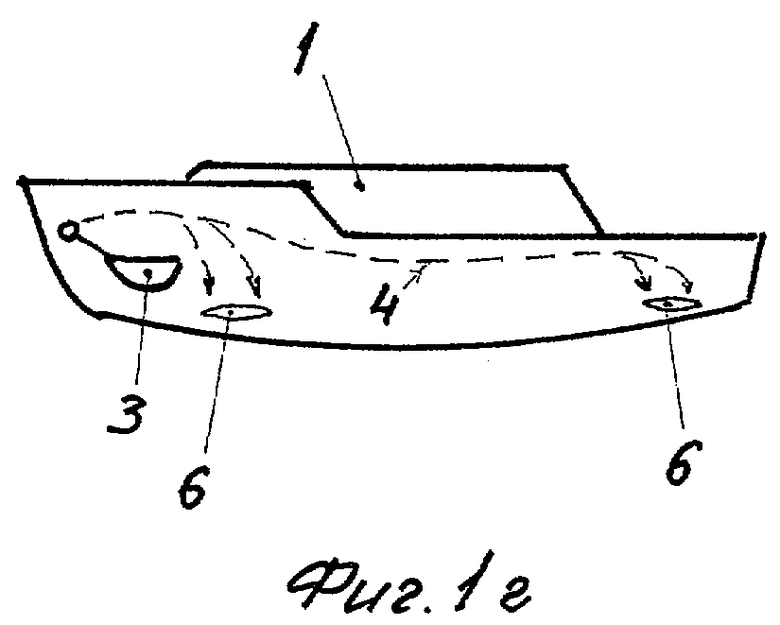
Кинематическая связь может быть переключаемой и настраиваться в зависимости от условий плавания. Например, система на фиг.1г имеет два ЧЭ (поплавки по скулам) и четыре ИЭС (водяные горизонтальные рули), которые могут переключаться с помощью переключаемых муфт, быстросъемных креплений и других традиционно применяемых для этой цели элементов.
В тех случаях, когда ИЭС - это транцевые плиты, для облегчения воздействия на них они могут быть подпружинены вниз относительно корпуса судна, а для предотвращения выхода на нерабочие режимы могут иметь ограничители.
В сложных условиях постоянной сырости целесообразно крепить ЧЭ, ИЭС, двуплечие рычаги и амортизаторы эластичным креплением - сайлент-блоками или резиновой, резинотканевой пластинами.
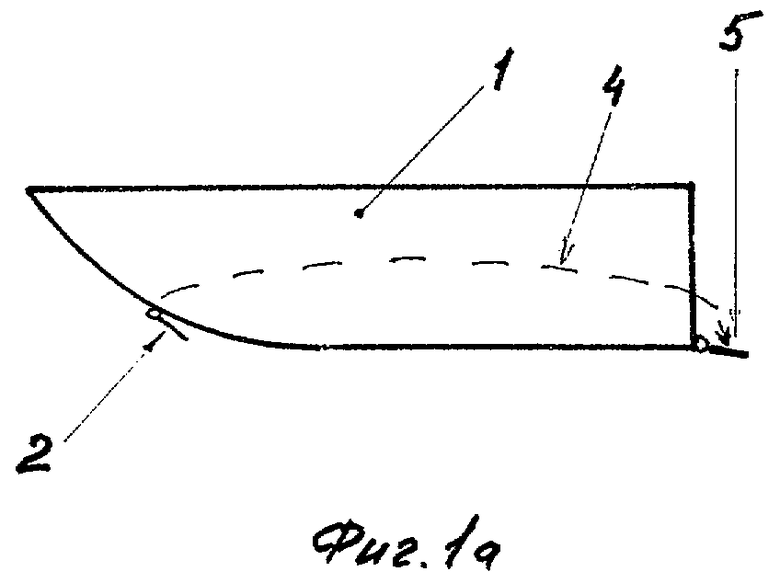
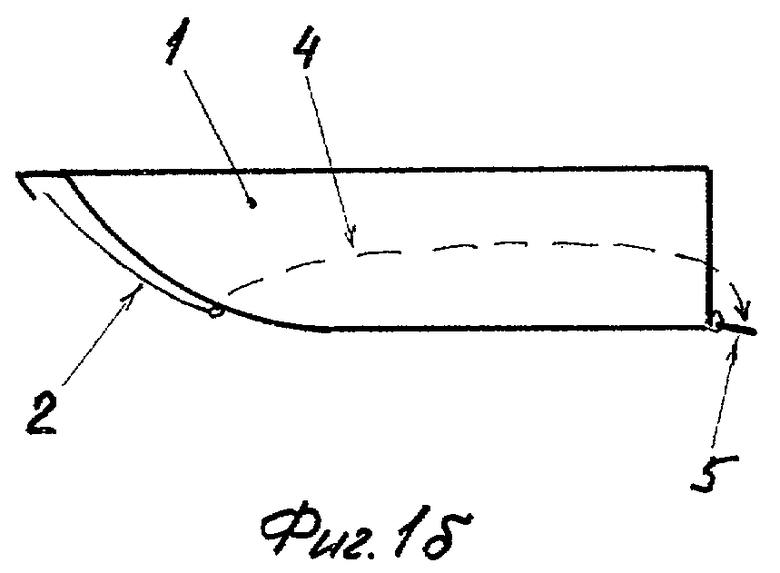
На фиг.1a-1г изображены четыре подварианта первого варианта системы, где: 1 - судно, 2 - ЧЭ в виде гидродинамических поверхностей (пластин), 3 - ЧЭ в виде поплавка, 4 - кинематическая связь (показана функционально), 5 - ИЭС - транцевые плиты, 6 - ИЭС - горизонтальные водяные рули.
На фиг.2 изображен второй вариант системы, где: 7 - отверстие в носовой части судна, соединенное трубой 4а с гидроцилиндром 8, приводящим в действие поворотный триммер 9.
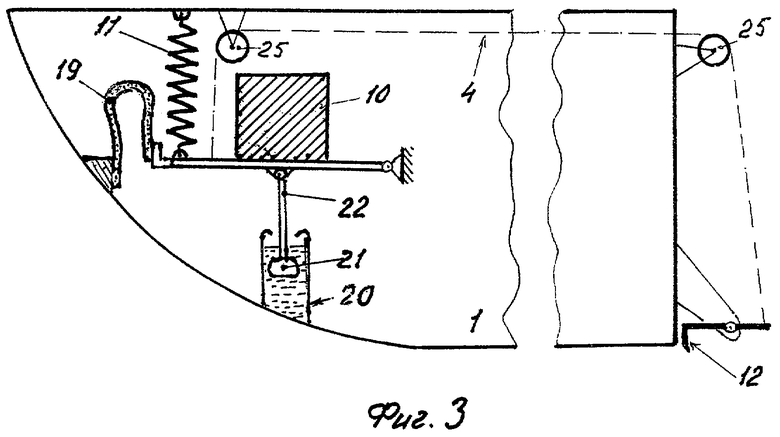
На фиг.3 изображен третий вариант системы, где: 10 - груз, подвешенный на пружине 11. Усилие от колебаний груза передается на встречно-поворотный триммер 12 с помощью размещенного на двух шкивах тросика 4. Груз соединен с корпусом судна демпфером в виде резинотканевой ленты 19, закрепленной на корпусе с перегибом в поперечном направлении на 180 градусов, или в виде гидроцилиндра 20 с частично-сферическим поршнем 21 и штоком 22.
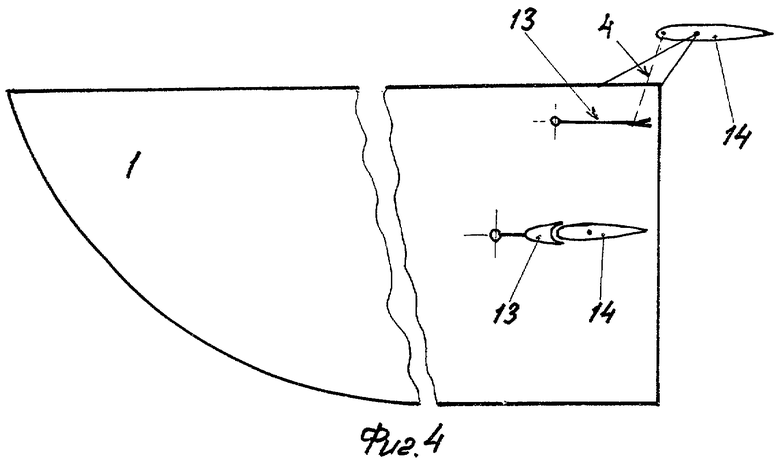
На фиг.4 изображен четвертый вариант системы, где: 13 - флюгер, 14 - воздушный горизонтальный руль. Показаны два подварианта: раздельной и совмещенной конструкции (с кулисным соединением флюгера и руля, где кулиса на флюгере имеет вид вилки).
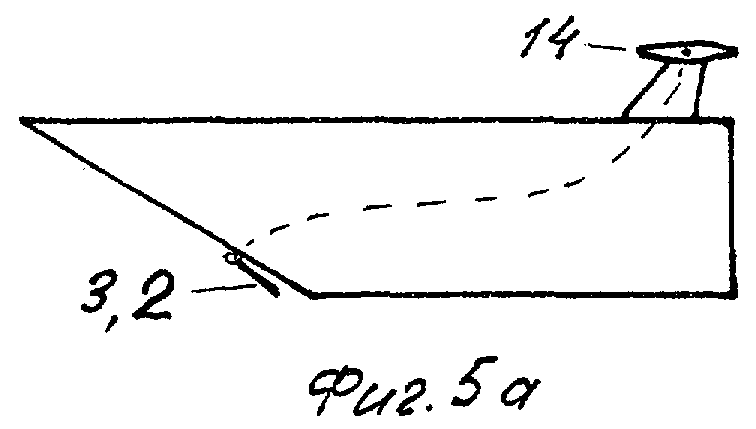
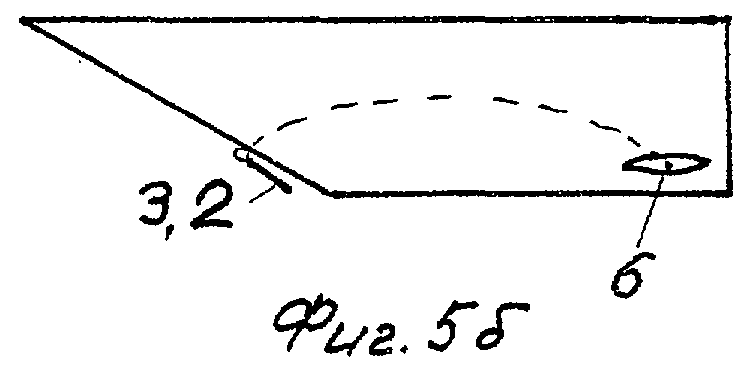
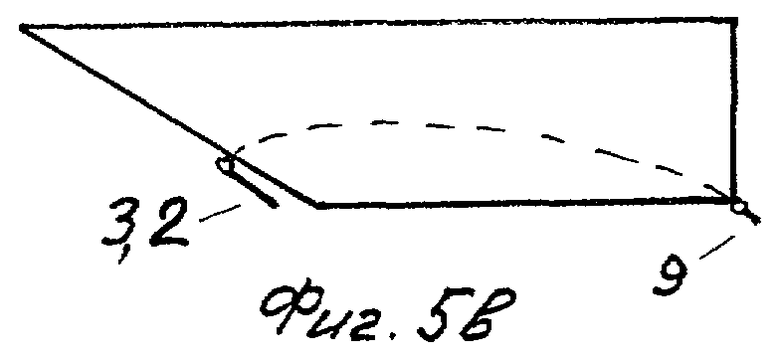
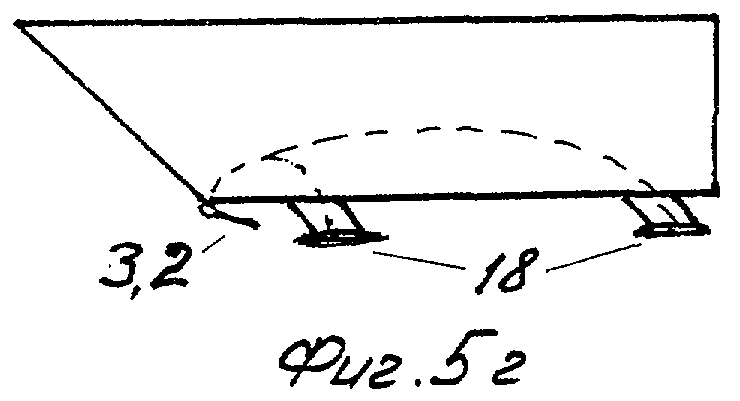
На фиг.5а, б, в, г показано сочетание гидродинамической поверхности 2 или поплавка 3 соответственно с воздушным рулем 14, водяным рулем 6, триммером 9 и управляемыми подводными крыльями 18.
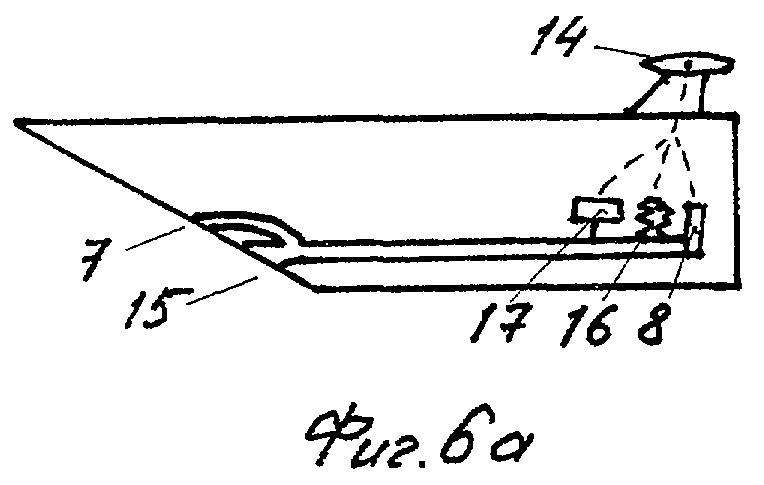
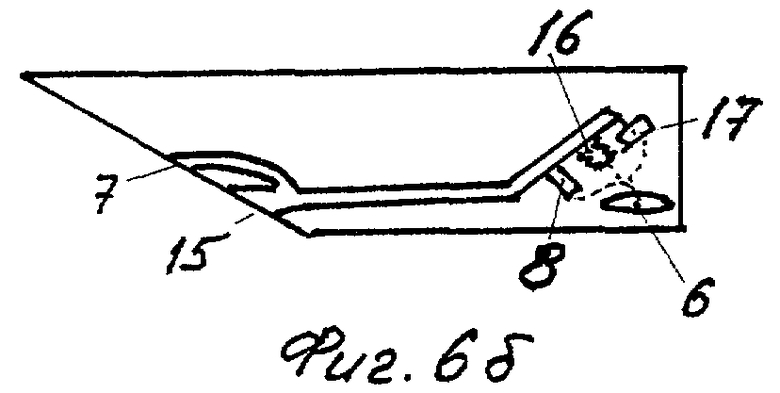
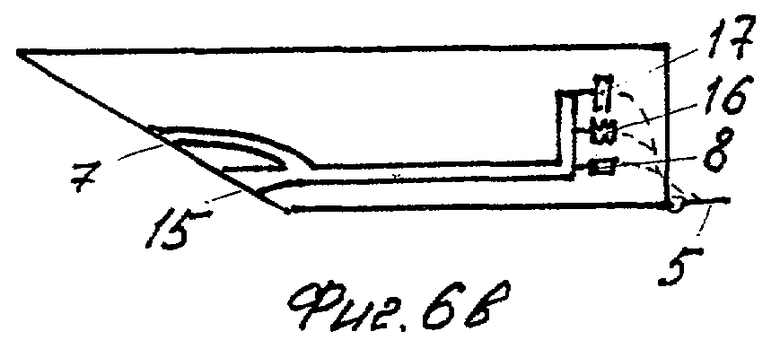
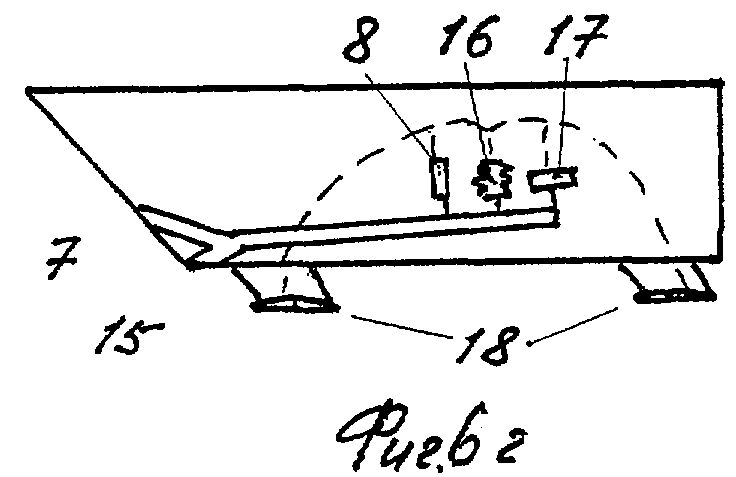
На фиг.6а, б, в, г показано сочетание отверстия 7 и щели 15 соответственно с воздушным рулем 14, водяным рулем 6, транцевыми плитами 5 и управляемыми подводными крыльями 18, приводимыми в действие соответственно гидроцилиндром 8, сильфоном 16 и мембранной полостью 17.
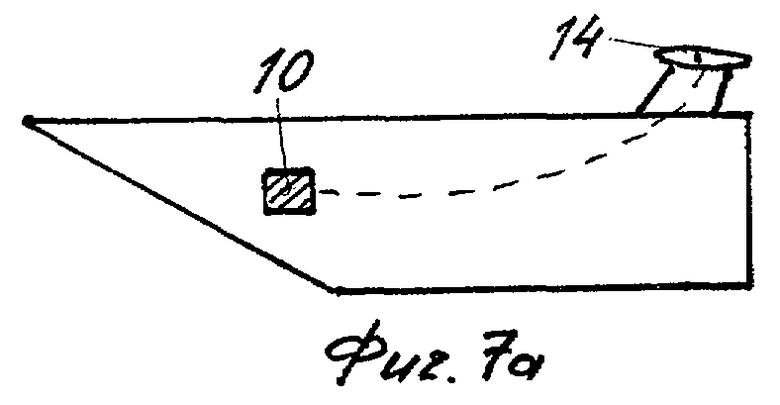
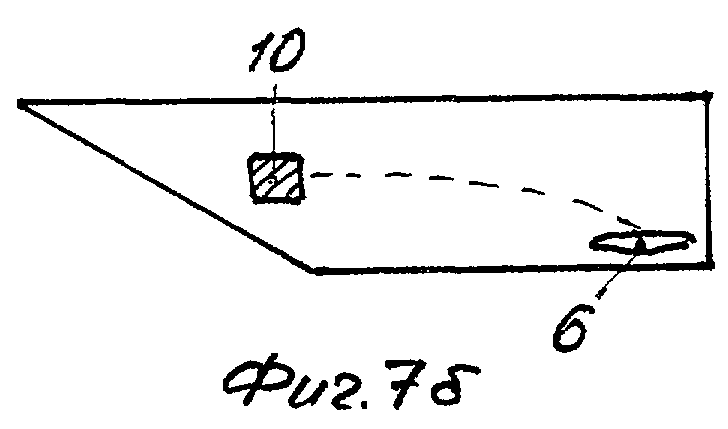
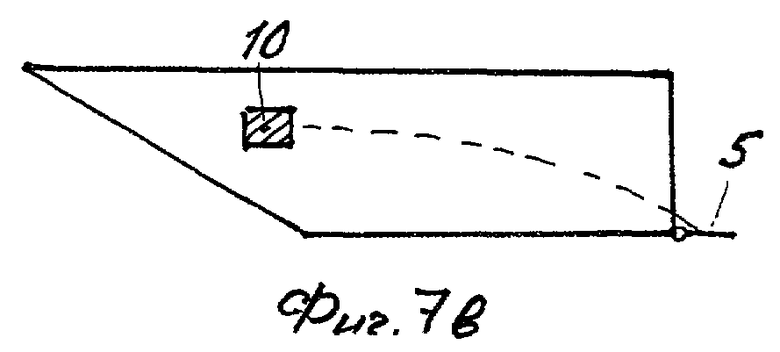
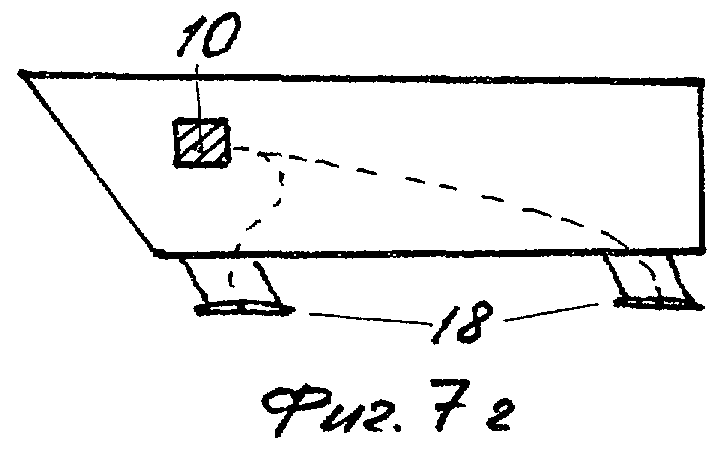
На фиг.7а, б, в, г показано сочетание подпружиненной массы 10 соответственно с воздушным рулем 14, водяным рулем 6, транцевой плитой 5 и управляемыми подводными крыльями 18.
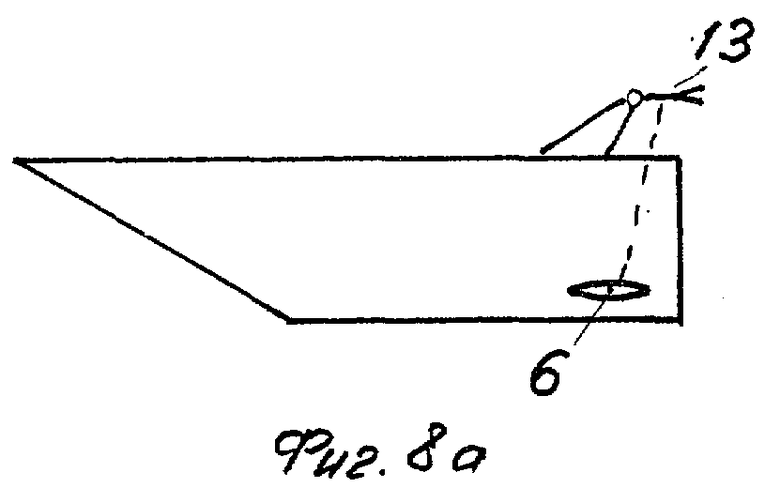
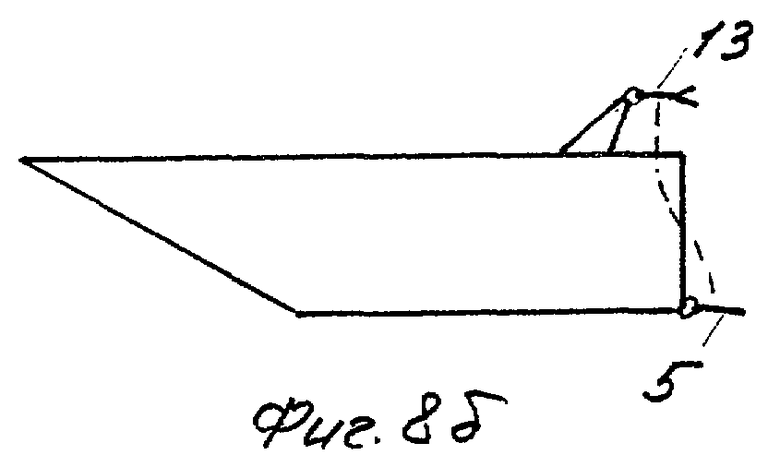
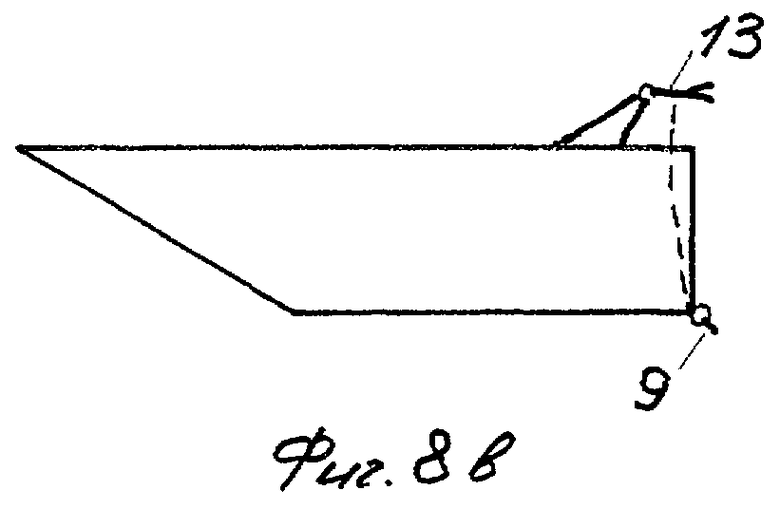
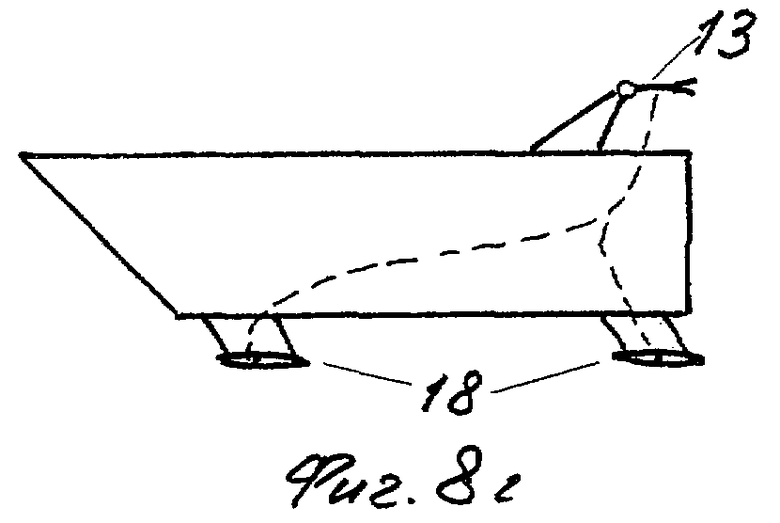
На фиг.8а, б, в, г показано сочетание аэродинамических флюгерных поверхностей 13 соответственно с водяным рулем 6, транцевыми плитами 5, триммерами 9 и управляемыми подводными крыльями 18.
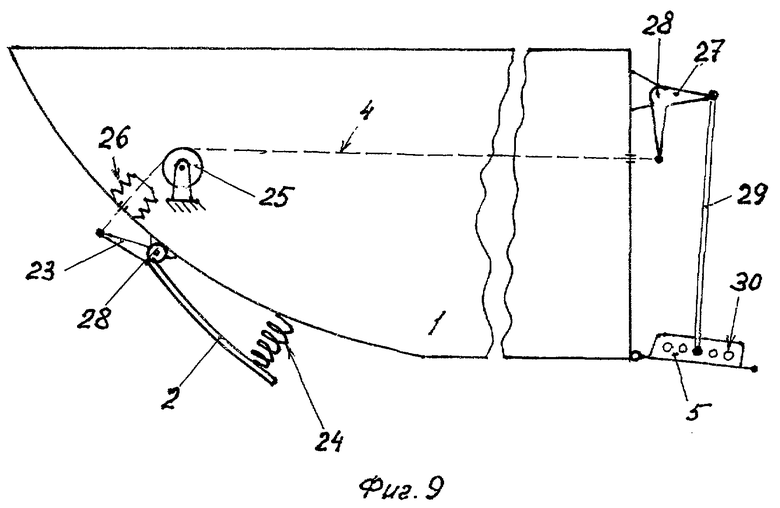
На фиг.9 увеличенно показан вариант на фиг.1а, где: 1 - корпус судна, 2 - гидродинамическая пластина с выступающим рычагом 23, подпружиненная относительно корпуса судна пружиной 24, 4 - кинематическая связь в виде тросика или шнура, проходящего через шкив 25. Для герметичности тросик закреплен на торце резинового сильфона 26. Тросик соединен с одним плечом углового двуплечего рычага 27, закрепленного на транце с помощью резинометаллического шарнира 28. Второе плечо двуплечего рычага соединено с транцевой плитой 5 штоком 29. На транцевой плите имеется переменное место крепления штока в виде ряда отверстий 30.
Работает система на фиг.1 так: при поднятии волной поплавка правой скулы возможно шесть способов срабатывания ИЭС в различных количествах, направлениях и комбинациях (система имеет два ЧЭ и четыре ИЭС). Устройство узлов отключения и переключения тросов - задача обычного конструкторского проектирования и здесь не рассматривается
A. На малой волне - правый передний руль вниз, этого будет достаточно для полной стабилизации по крену и дифференту.
Б. На средне-малой волне - правый передний руль вниз, левый задний руль вверх, чтобы компенсировать усилившийся момент по крену и дифференту.
B. На средней волне, когда уже есть опасность заливания палубы - задний левый руль вверх.
Г. На средне-большой волне, когда уже есть опасность зарывания носом в волну - передний левый руль вверх.
Д. На большой волне, когда уже есть опасность заливания и опрокидывания судна - оба передних руля вверх, задний правый руль вниз (облегчая вход на волну).
Е. На спокойной воде, чтобы компенсировать перемещение пассажиров с борта на борт или крен от поворота судна, - оба правых руля вверх.
Такая многофункциональная система целесообразна для водоизмещающих судов высокого класса комфортности. Для глиссирующих судов ни переключение, ни даже отключение ИЭС нецелесообразны, так как глиссирующие суда могут двигаться только на небольшой волне, на которую они конструктивно рассчитаны. При волне, большей максимально допустимой, они снижают скорость и переходят в водоизмещающий или переходный режим. Так как ИЭС рассчитан на крейсерскую скорость, то на малой скорости он практически теряет свою эффективность, одновременно уменьшается и воздействие волн на ЧЭ, который на глиссирующих судах должен быть непоплавкового типа (исключение - вариант 3), что практически означает самоотключение системы.
Устройство на фиг.2-8 работает аналогично: воздействие на ЧЭ приводит к отклонению ИЭС в направлении, парирующем возмущающее действие.
Система на фиг.2 работает так: при встрече носа судна с волной вода попадает в отверстие 7 и за счет своего гидродинамического давления через воду, находящуюся в трубе 31, приводит в действие водяной гидроцилиндр 8, который выступающим концом поршня (показан выступающей из гидроцилиндра стрелкой 32) отклоняет триммер 9 путем непосредственного контакта. Давление воды на днище вблизи транца повышается, корма приподнимается и дифферент судна уменьшается. Следовательно, уменьшается угол атаки в носовой части судна и всхождение на волну происходит мягче, а корпус судна испытывает меньшую килевую качку.
Система на фиг.3 работает так: при встрече носа судна с волной нос начинает подниматься. Груз 10 при этом за счет инерции стремится остаться на прежнем уровне и тянет тросик 4. Тросик, проходя по шкивам 25, тянет противоположное плечо триммера 12. Рабочая часть триммера выступает за транцем и совместно с прилегающей частью днища создает подпорный водяной клин, который изменяет обтекание околотранцевой части днища, создавая на ней дополнительную подъемную силу, которая поднимает транец, уменьшает дифферент на корму и делает всхождение на волну более мягким.
При сходе с волны груз 10 возвращается на прежнее относительно корпуса положение, испытывая затухающие колебания, для ослабления которых служат демпферы в виде резинотканевой ленты 19 или в виде открытого сверху гидроцилиндра 20, заполненного водой или антифризом. В цилиндре находится частично-сферический поршень 21, соединенный с грузом 10 штоком 22. Шток крепится к грузу шарнирно или с помощью упругого крепления.
Система на фиг.4 работает так: при поднятии носа судна задняя часть флюгера 13 поднимается и через жесткую тягу 4 (в верхнем варианте) или путем непосредственного контакта с помощью кулисы в виде вилки (в нижнем варианте) поднимает вверх носок горизонтального воздушного руля 14. На руль действует аэродинамическая сила, направленная вверх, которая поднимает корму судна, уменьшая дифферент на корму.
Система на фиг.9 работает так: при ходе на спокойной волне гидродинамическая пластина 2 не касается поверхности воды. При встрече с волной она отклоняется вверх-назад и соединенный с ней рычаг 23 тянет тросик 4. Тросик, проходя через шкив 25, тянет нижний конец двуплечего рычага 27, второе плечо которого толкает вниз управляемую транцевую плиту 5. Давление воды на ней повышается, корма судна поднимается и дифферент на корму уменьшается.
При выходе из волны пластина 2 возвращается в исходное положение под действием пружины 24, а транцевая плита 5 возвращается в исходное положение под действием давления воды.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2007 |
|
RU2410286C2 |
| СУДОВАЯ ТРАНСМИССИЯ (ВАРИАНТЫ) | 2006 |
|
RU2313471C2 |
| ТРАНСМИССИЯ СУДНА (ВАРИАНТЫ) | 2005 |
|
RU2313470C2 |
| МЕХАНИЗМ КОМПЕНСАЦИИ УСИЛИЙ УПРАВЛЕНИЯ | 2012 |
|
RU2515820C2 |
| ГЛИССИРУЮЩЕЕ СУДНО | 2002 |
|
RU2212352C1 |
| НАДУВНАЯ ЛОДКА (ВАРИАНТЫ) | 2010 |
|
RU2436703C2 |
| КОРПУС ГЛИССИРУЮЩЕГО СУДНА | 1991 |
|
RU2034736C1 |
| Способ движения на "водной подушке" и глиссирующее судно для его осуществления | 2015 |
|
RU2615031C2 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2096240C1 |
| МНОГОКОРПУСНОЕ СУДНО /ВАРИАНТЫ/ | 2015 |
|
RU2579633C1 |
Изобретение относится к судостроению и предназначено для стабилизации по крену и дифференту глиссирующих и водоизмещающих судов с крейсерской скоростью не менее 15 км/ч и длиной не более 5 длин волны на данной акватории. Система стабилизации судна включает судно с исполнительными элементами стабилизации и чувствительным элементом. Исполнительные элементы стабилизации включают в себя горизонтальные воздушные или водяные рули, и/или управляемые транцевые плиты, и/или триммеры, и/или управляемые подводные крылья. В качестве чувствительного элемента используют гидродинамические поверхности и/или поплавки, мембранные полости, аэродинамические флюгерные поверхности. Чувствительные элементы преобразуют энергию набегающих волн для привода исполнительных элементов стабилизации. Исполнительные элементы стабилизации связаны с чувствительными элементами посредством системы тросов, или тяг, или шкивов, или блоков, или двуплечих рычагов, или переключаемых муфт, или быстросъемных креплений. Достигается уменьшение дифферента при выходе на глиссирование, облегчается вход судна на волну при шторме. 5 н. и 18 з.п. ф-лы, 24 ил.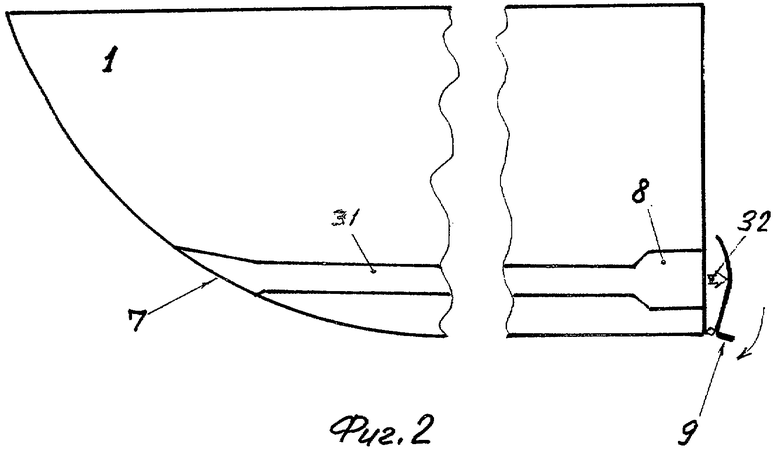
1. Система стабилизации судна, отличающаяся тем, что судно имеет горизонтальные воздушные или водяные рули, и/или управляемые транцевые плиты, и/или триммеры, и/или управляемые подводные крылья (исполнительный элемент стабилизации), кинематически связанные с гидродинамическими поверхностями и/или поплавками, расположенными в носу и/или по борту судна с возможностью перемещения под действием волн.
2. Система по п.1, отличающаяся тем, что гидродинамические поверхности или поплавки подпружинены упругим элементом постоянной или переменной жесткости относительно корпуса судна.
3. Система по п.1, отличающаяся тем, что кинематической связью является система тросов, тяг, шкивов, блоков, двуплечих рычагов, переключаемых муфт и быстросъемных креплений, соединенных с возможностью передачи изменения направления и/или разветвления усилий от чувствительных элементов к исполнительным элементам стабилизации по правилам классической механики.
4. Система по п.1, отличающаяся тем, что кинематическая связь имеет переменные передаточные отношения и изменяемое взаимное положение чувствительного и исполнительного элементов относительно элементов кинематической связи.
5. Система по п.1, отличающаяся тем, что транцевые плиты подпружинены вниз, имеют ограничители и имеют переменное место крепления элементов кинематической связи на них.
6. Система по п.1, отличающаяся тем, что чувствительные и/или исполнительные элементы и/или двуплечие рычаги крепятся эластичным креплением.
7. Система стабилизации судна, отличающаяся тем, что судно имеет горизонтальные воздушные или водяные рули, и/или управляемые транцевые плиты, и/или триммеры, и/или управляемые подводные крылья (исполнительный элемент стабилизации), кинематически связанные с гидроцилиндром, сильфоном или мембранной полостью, работающими от гидродинамического давления набегающей волны и соединенными трубами с отверстием (отверстиями) или каплевидной, или грушевидной щелью в носовой части судна.
8. Система по п.7, отличающаяся тем, что отверстие (отверстия) или щель имеют сужающуюся воронкообразную форму.
9. Система по п.7, отличающаяся тем, что транцевые плиты подпружинены вниз, имеют ограничители и имеют переменное место крепления элементов кинематической связи на них.
10. Система по п.7, отличающаяся тем, что чувствительные и/или исполнительные элементы и/или двуплечие рычаги крепятся эластичным креплением.
11. Система стабилизации судна, отличающаяся тем, что судно имеет горизонтальные воздушные или водяные рули, и/или управляемые транцевые плиты, и/или триммеры, и/или управляемые подводные крылья (исполнительный элемент стабилизации), кинематически связанные с подпружиненной массой в носовой или бортовой части судна.
12. Система по п.11, отличающаяся тем, что подпружиненная масса снабжена закрепленным к ней и к корпусу судна демпфером в виде резинотканевой ленты, закрепленной с перегибом на 180° в поперечном направлении или в виде открытого вертикального гидроцилиндра с расположенным в нем с зазором частично-сферическим поршнем с одним клапаном, перепускающим жидкость при ходе массы вниз.
13. Система по п.11, отличающаяся тем, что кинематической связью является система тросов, тяг, шкивов, блоков, двуплечих рычагов, переключаемых муфт и быстросъемных креплений, соединенных с возможностью передачи изменения направления и/или разветвления усилий от чувствительных элементов к исполнительным элементам стабилизации по правилам классической механики.
14. Система по п.11, отличающаяся тем, что кинематическая связь имеет переменные передаточные отношения и изменяемое взаимное положение чувствительного и исполнительного элементов относительно элементов кинематической связи.
15. Система по п.11, отличающаяся тем, что транцевые плиты подпружинены вниз, имеют ограничители и имеют переменное место крепления элементов кинематической связи на них.
16. Система по п.11, отличающаяся тем, что чувствительные и/или исполнительные элементы и/или двуплечие рычаги крепятся эластичным креплением.
17. Система стабилизации судна, отличающаяся тем, что судно имеет горизонтальные воздушные или водяные рули, и/или управляемые транцевые плиты, и/или триммеры, и/или управляемые подводные крылья (исполнительный элемент стабилизации), кинематически связанные с аэродинамическими флюгерными поверхностями, расположенными в кормовой части судна.
18. Система по п.17, отличающаяся тем, что задняя часть флюгерной поверхности соединена с передней частью рулевой поверхности кулисным креплением.
19. Система по п.17, отличающаяся тем, что кинематической связью является система тросов, тяг, шкивов, блоков, двуплечих рычагов, переключаемых муфт и быстросъемных креплений, соединенных с возможностью передачи изменения направления и/или разветвления усилий от чувствительных элементов к исполнительным элементам стабилизации по правилам классической механики.
20. Система по п.17, отличающаяся тем, что кинематическая связь имеет переменные передаточные отношения и изменяемое взаимное положение чувствительного и исполнительного элементов относительно элементов кинематической связи.
21. Система по п.17, отличающаяся тем, что транцевые плиты подпружинены вниз, имеют ограничители и имеют переменное место крепления элементов кинематической связи на них.
22. Система по п.17, отличающаяся тем, что чувствительные и/или исполнительные элементы и/или двуплечие рычаги крепятся эластичным креплением.
23. Система стабилизации судна, отличающаяся тем, что судно имеет две или три системы по пп.1, 7, 11, каждая из которых состоит из чувствительного элемента, кинематической связи и исполнительного элемента, причем две из них функционально работают диагонально, или все системы соединены перекрестно, где один чувствительный элемент может воздействовать на два или три исполнительных элемента сразу, причем кинематическая связь может отключаться или переключаться.
| US 3757723 A, 11.09.1973 | |||
| GB 1066416, 26.04.1967 | |||
| WO 9825816 A1, 18.06.1998. |

