Изобретение относится и авиации и предназначено для управления самолетом по тангажу и, при условии раздельного управления левым и правым рулями высоты /механизм "ножниц" рулей высоты/ - по крену.
Известны самолеты по схеме "утка" см. пат. 2087067 или 2090446.
Их недостатки - самоувеличение управляющего воздействия при увеличении тангажа и, как следствие, ранний срыв потока на рулях.
Предлагаемое управление "утка" состоит из цельно поворотных рулей /руля/ высоты, расположенных впереди крыла /крыльев/. Рули кинематически, например механически, гидравлически или электрически, связаны с флюгерной поверхностью /поверхностями/ /далее - "флюгер"/, которая в полете под действием набегающего потока воздуха стремится расположиться продольно потоку.
При этом рули в общем случае могут поворачиваться на 560°, а при использовании механической кинематической связи рули могут вращаться относительно своей оси совершенно свободно.
Сущность изобретения в том, что положение рулей не зависит напрямую от органов управления самолетом, а корелируется с положением флюгера, но может отличаться от него на ± угол управления, который задается летчиком. Так как флюгер стремиться установиться продольно потоку, то он поворачивает на этот угол руль относительно потока /а не относительно фюзеляжа/. То есть руль всегда находится под заданным углом к потоку независимо от вертикального скольжения фюзеляжа. В этом случае при задании команды на изменение тангажа не происходит самоувеличения управляющего воздействия, оно остается постоянным.
Или же при увеличении отклонения флюгера от продольной оси самолета, точнее - от расчетного положения, соответствующего горизонтальному полету, угол управления, заданный летчиком, может автоматически уменьшаться за счет предусмотренных особенностей кинематической связи рулей с флюгером /"Регрессивный"вариант/. То есть при повороте флюгера на угол скольжения руль повернется на угол, несколько больший этого. В этом случае при изменении тангажа будет происходить самоуменьшение управляющего воздействия. То есть характеристики управления будут аналогичны аэродинамической схеме с хвостовыми рулями высоты.
При этом сохраняются все преимущества управления "утка": положительная подъемная сила на рулях /т.е. меньшая на удвоенную площадь рулей площадь крыла/, отсутствие "просадки" при управлении /повышается точность управления и ускоряется его реакция на действия летчика/, и отсутствие "затенения" рулей /хорошая управляемость на закритических режимах/.
В частности, следствием вышесказанного будет быстрый выход из положения сваливания. Если хвостовое управление при этом толкает самолет вверх, превращая кинетическую энергию в потенциальную /т.е. уменьшая и без того недостаточную скорость/, то предлагаемое управление при любом скольжении и тангаже сразу опускает нос самолета вниз, способствуя росту скорости и переходу в стабильный горизонтальный полет.
Более того, управление приобретает новые качества: во-первых оно сохраняет эффективность при любом направлении набегающего потока, в частности при движении хвостом вперед после кабрирования и в плоском штопоре. Во-вторых такая система управления придает самолету еще одно свойство - он становится менее чувствительным к так называемым "воздушным ямам", т.е. к восходящим и нисходящим потокам, так как при возникновении незапланированного вертикального скольжения рули поворачиваются в том же направлении без изменения подъемной силы на них, или с уменьшением при регрес. варианте, а последующее воздействие скольжения на крыло сразу приводит к изменению тангажа, направленному на уменьшение возмущающего воздействия.
Так как при такой схеме управления рули создают подъемную силу, то их относительная площадь может быть больше, чем при хвостовом управлении, а вынос центра тяжести самолета относительно центра подъемной силы крыла может быть больше, что придаст самолету хорошие антиштопорные свойства.
Наиболее целесообразно расположение рулей и флюгеров на одной оси перпендикулярно продольной плоскости самолета, в этом случае они могут приводиться в действие одним механизмом управления. Однако возможны варианты, когда оси имеют прямую или обратную стреловидность, а также прямую или обратную V-образность.
Флюгеры могут располагаться на рулях соосно или несоосно с ними /на конце, в корневой части или посередине длины консоли руля/, т.е. являться как бы выносными триммерами. Или могут быть расположены отдельно и, желательно, впереди рулей.
При применении механической кинематической связи /в основном для легкомоторных самолетов и планеров/ необходимо, чтобы центр аэродинамических сил /далее ЦАС/ находился позади вращения руля. Однако расположение ЦАС точно позади оси вращения руля в некоторых случаях может привести к возникновению паразитных автоколебаний системы руль-флюгер-механизм. Для исключения возможности таких автоколебаний ось вращения руля может быть расположена впереди-выше или впереди-ниже ЦАС. Возможно применение демпферов.
Для гидравлической и электрической систем управления это условие менее существенно, так как в них подразумевается большое самозатухание или даже самоторможение исполнительной машины.
При применении механической кинематической связи также обязательны весовая балансировка рулей и флюгеров. Хотя возможен и небольшой сознательный дебаланс со смещением центра тяжести ниже оси вращения руля. Это может быть сделано для того, чтобы в стояночном положении рули и флюгеры занимали безопасное для них и для обслуживающего персонала горизонтальное положение и не раскачивались под действием ветра.
С этой же целью рули и флюгеры могут иметь небольшие крутильные пружины, центрирующие их в горизонтальном положении. Или иметь небольшие стояночные тормоза, в частности съемные.
Если же тормоз будет предусмотрен конструкцией самолета то он должен во-первых исключать самопроизвольное срабатывание /например, срабатывать от пневмоцилиндра при подаче давления/; во-вторых его усилие должно быть небольшим, чтобы в полете оно только затрудняло, но не исключало возможность управления; и в третьих он должен иметь двойное управление - т.е. если летчик забудет его выключить, то он выключится автоматически при наборе определенной скорости.
Для гидравлической и электрической систем управления весовая балансировка и стояночные приспособления не обязательны.
Возможно несколько десятков вариантов механической кинематической связи флюгера с рулем, особенно с ограниченным диапазоном перемещения рулей относительно фюзеляжа. Рассмотрим три таких варианта.
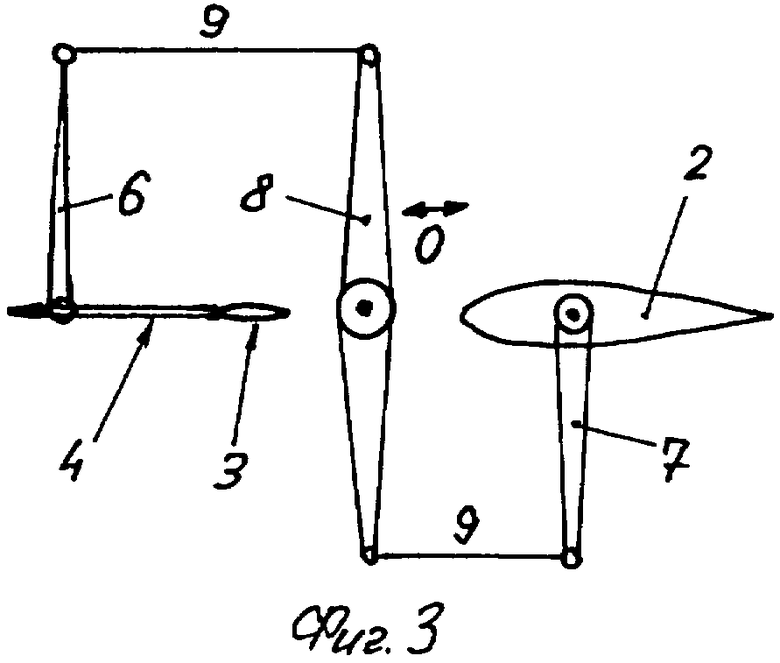
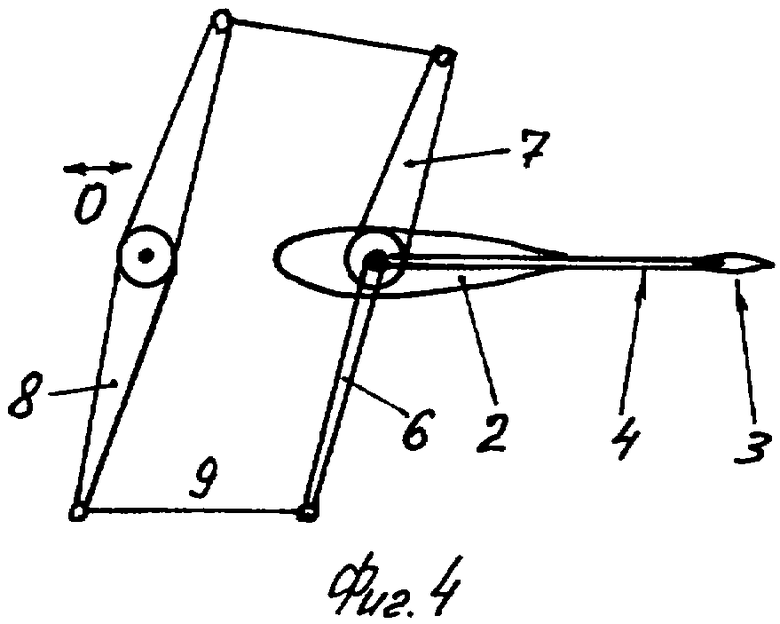
Первый механический вариант наиболее прост конструктивно, но обеспечивает рабочий диапазон примерно 150/±75 на фиг.3 и +50 - -100 на фиг.4/. Поэтому флюгер должен иметь запас прочности на случай движения хвостом вперед. На фиг.3 показан аэродинамический подвариант с разнесенным расположением руля и флюгера, а на фиг.4 - с соосным /как на фиг.1, 2/.
Оба подварианта этого варианта состоят из расположенных на осях руля и флюгера противоположно направленных рычагов, которые шарнирно соединены тягами с концами коромысла /прямой двуплечий рычаг 1 рода/. Ось вращения коромысла закреплена с возможностью продольного перемещения к /от/ оси руля /например по направляющим или по дуге, т.е. на другом, желательно большем рычаге/.
Если рычаг руля будет короче, чем рычаг флюгера, или соединенное с рулем плечо коромысла будет длиннее, чем плечо флюгера, то при появлении скольжения /при отклонении флюгера/ руль переместится на бóльший угол, чем флюгер. И угол атаки руля к потоку уменьшится /Регрессивный вариант на фиг.4/.
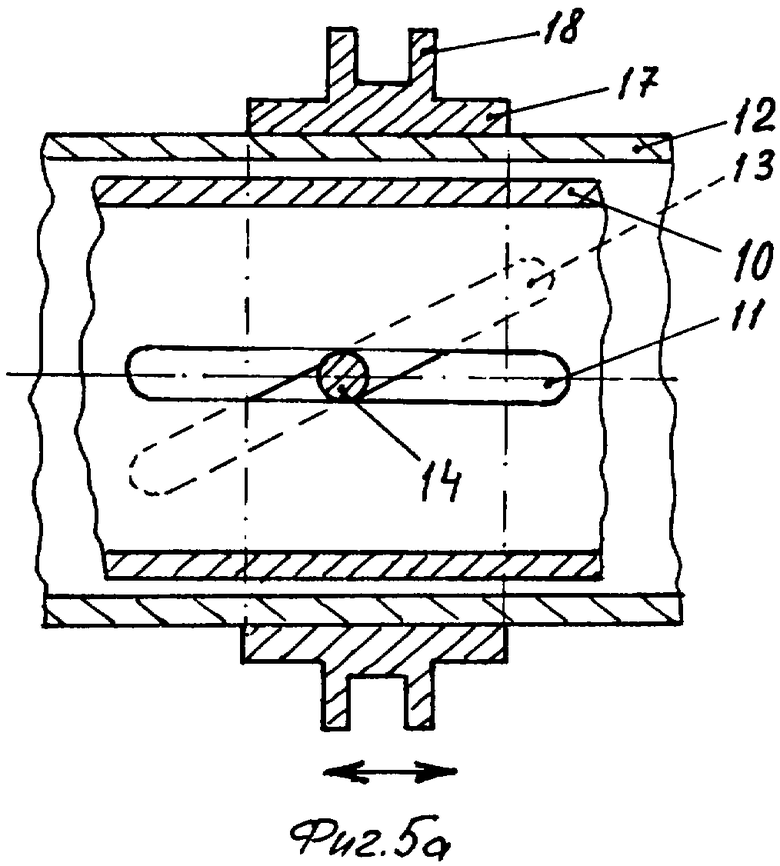
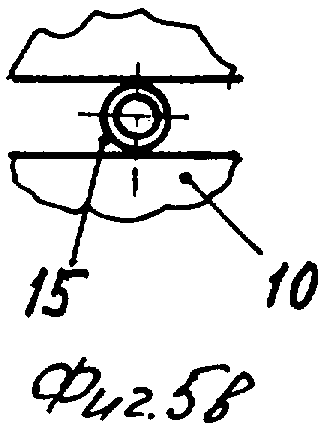
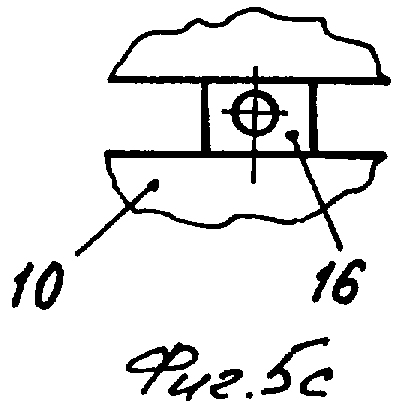
Второй механический вариант кинематической связи представляет собой соосно расположенные валы руля и флюгера, выполненные как труба в трубе /фиг.5а/. В одной из труб имеется продольная прорезь, а во второй - винтовая прорезь с большим шагом. Или на трубах имеются две противоположно направленные винтовые прорези. В место перекрещивания прорезей входит штырь, закрепленный на управляющей скользящей втулке с ребордами. Втулка расположена на наружной трубе и управляется вилкой или рычагом от органа управления самолетом /не показаны/. Причем штырь для уменьшения трения может иметь два ролика /фиг.5в/ или два ползуна из антифрикционного материала /фиг.5с/.
Для большей точности управления в режиме горизонтального полета винтовая прорезь /прорези/ может иметь в середина бóльший шаг, чем по концам. То есть передаточное отношение в средней части меньше, чем в краях.
Регрессивный вариант может быть реализован так: реборды на управляющей муфте образуют в рабочем диапазоне винтовую канавку, замыкающуюся затем саму на себя. Наклон винтовой канавки выбран таким, что при увеличении положительного или отрицательного скольжения происходит уменьшение управляющего воздействия.
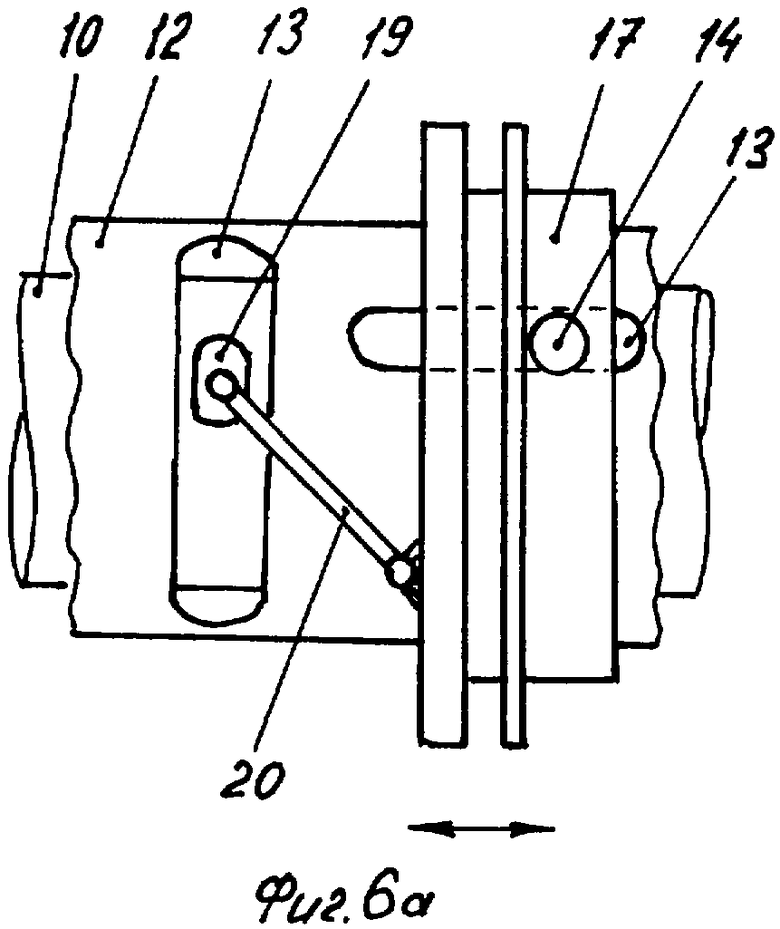
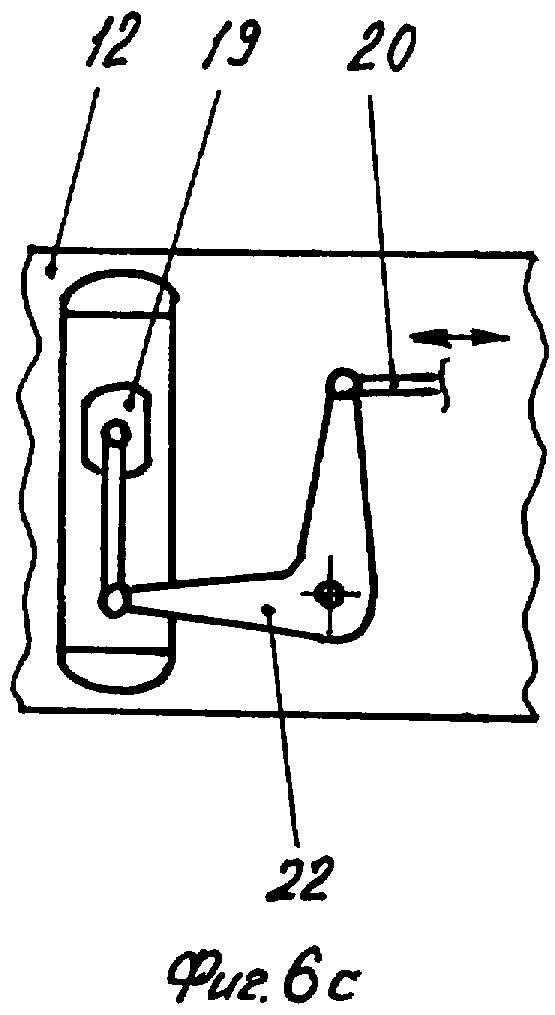
Третий механический вариант также представляет собой соосно расположенные валы руля и флюгера, выполненные как труба в трубе, и управляющую муфту с ребордами на наружной трубе. Но муфта расположена на ней не скользяще, а на шлицах, роль которых может выполнять продольный паз или прорезь в трубе и ролик в нем /фиг.6а/. В наружной трубе имеется прорезь, через которую проходит рычаг, закрепленный на внутренней трубе. Рычаг соединен расположенной наискосок к оси труб тягой с двумя шаровыми шарнирами с шлицевой управляющей муфтой. Осевое перемещение муфты приводит к угловому перемещению внутренней трубы относительно наружной.
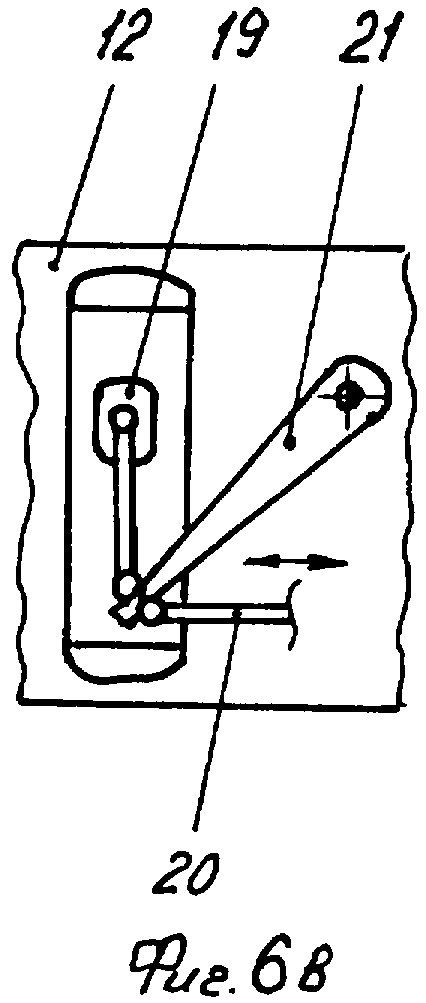
Для большей линейности перемещения рычаг внутренней трубы может быть соединен с управляющей муфтой двумя такими тягами через промежуточный одноплечий или двуплечий рычаг, закрепленный на наружной трубе.
Вариант на фиг.6а имеет одну особенность - при повороте рулей в одну сторону передаточное отношение увеличивается, а в другую - уменьшается. Последнее лучше выбрать для пикирования /выбирая направление наклона тяги/.
Для получения регрессивного варианта так же, как и во втором варианте, может быть применена винтовая канавка на муфте.
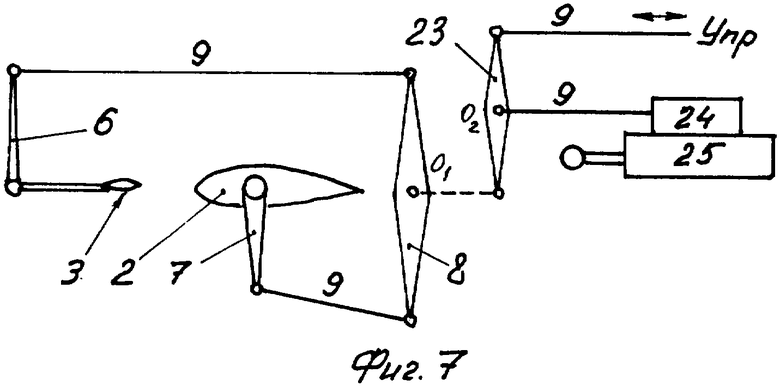
Гидравлический вариант кинематической связи состоит из расположенных на валах руля и флюгера противоположно направленных рычагов. Рычаги соединены тягами с концами коромысла, ось которого закреплена на конце второго коромысла /возможна унификация/. Ось второго коромысла соединена со штоком золотника /тягой или закреплена непосредственно на нем/, а второй конец второго коромысла соединен с органом управления. Золотник управляет гидроцилиндром привода рулей. /см. фиг.7/.
Для получения регрессивного варианта так же, как и в первом механическом варианте, рычаг руля должен быть короче, или соединенный с ним рычаг коромысла должен быть длиннее.
Данный вариант имеет рабочий диапазон отклонения рулей примерно 150°, например - 100° - +50°.
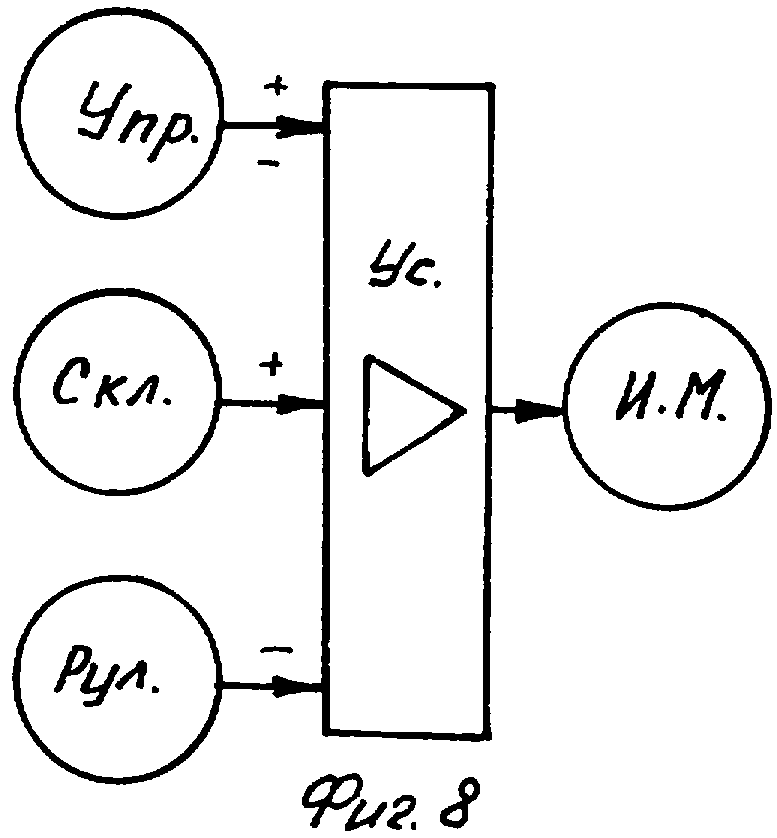
Электрический вариант кинематической связи состоит из датчиков вертикального скольжения, датчиков положения рулей и датчика положения органа управления. Сигналы датчиков подаются на усилитель, где алгебраически суммируются и, после усиления, подаются на исполнительную машину.
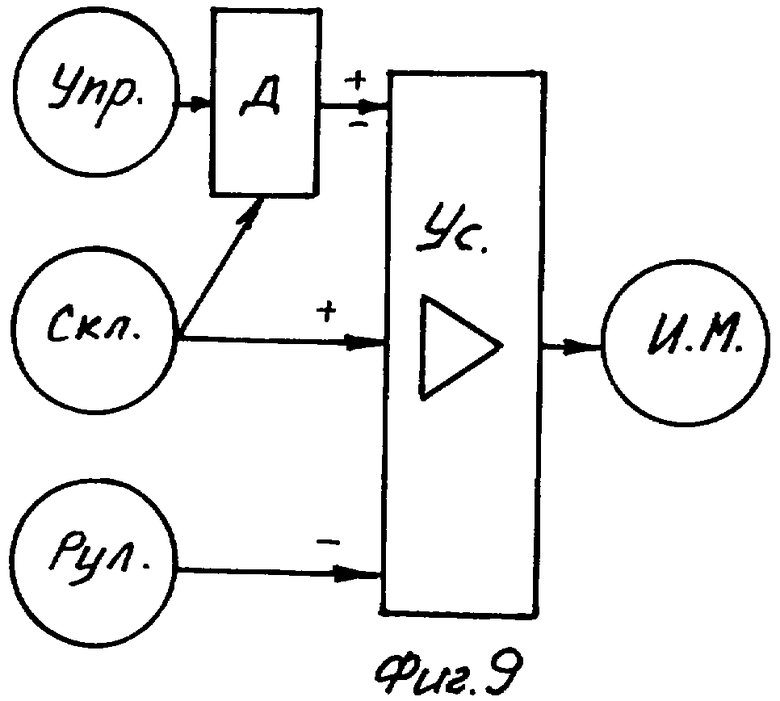
Для получения регрессивного варианта датчик органа управления может быть соединен с усилителем через делитель, управляемый сигналом датчика скольжения. Делитель может отключаться, т.е. шунтироваться.
При гидравлическом варианте управления размер флюгера и его штанги могут быть в несколько раз меньше, чем при механическом. А при электрическом варианте флюгером является датчик скольжения, который может быть сколь угодно малым.
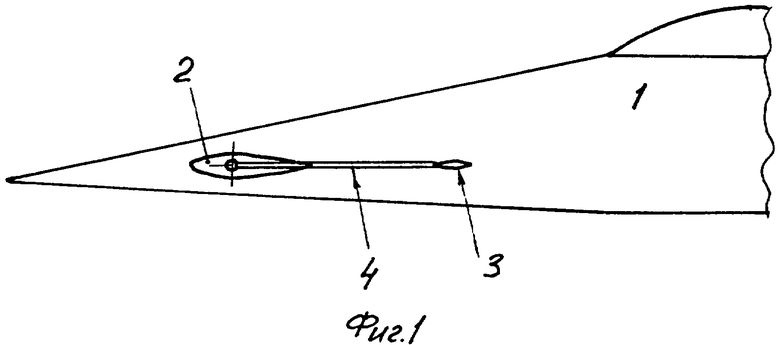
На фиг.1, 2 изображено предлагаемое управление, где: 1 - фюзеляж, 2 - руль высоты, 3 - флюгер, 4 - штанга флюгера, 5 - противовес.
На фиг.3, 4 изображен первый механический вариант кинематической связи, где: 6 - рычаг флюгера, 7 - рычаг руля, 8 - коромысло, 9 - тяги, точка 0 - ось вращения коромысла, имеющая возможность управляемого перемещения влево-вправо на чертеже в направляющих или на рычаге достаточной длины /не показаны/.
На фиг.5а, в, с, изображен в разрезе второй механический вариант кинематической связи, где: 10 - внутренняя труба с прорезью 11, 12 - наружная труба с прорезью 13, входящий в прорези штырь 14 с роликами 15 или ползунами 16. Штырь радиально-внутрь закреплен в муфта 17 с ребордами 18.
На фиг.6а, в, с, изображен третий механический вариант кинематической связи, где: 19 - рычаг на внутренней трубе, 20 - тяга с шаровыми шарнирами на концах, 21 - одноплечий рычаг, 22 - двуплечий рычаг.
На фиг.7 изображен гидравлический вариант управления, показан аэродинамический подвариант раздельного размещения руля и флюгера на фюзеляже, где: 8 - первое коромысло, 9 - тяги, 23 - второе коромысло, 24 - золотник, 25 - гидроцилиндр руля /связь гидроцилиндра с рулем не показана/.
На фиг.8, 9 изображены электрические варианты управления /на фиг.8 - регрессивный вариант/ где: Скл. - датчик скольжения, Рул. - датчик положения руля, Упр. - датчик положения органа управления. Ус. - усилитель, И.М. - исполнительная машина, Д - делитель.
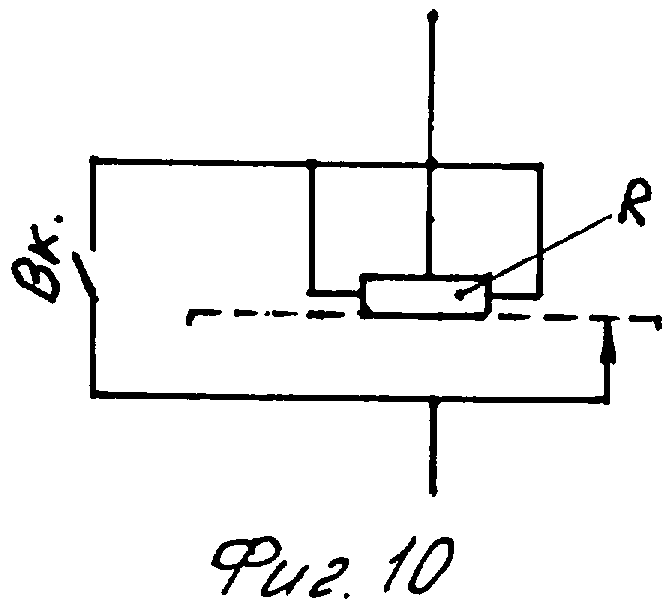
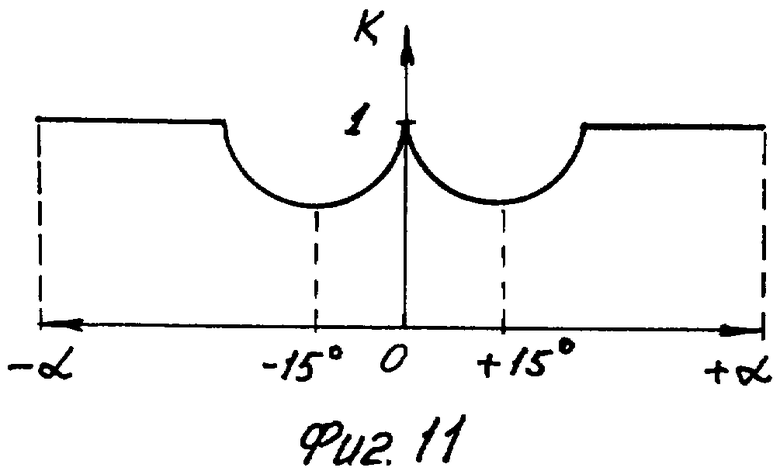
На фиг.10 показано возможное устройство делителя в виде электрического переменного резистора с тремя неподвижными и одним подвижным /от датчика скольжения/ контактом. На фиг.11 показана примерная характерика такого делителя, где: ±α - угол отклонения датчика скольжения, К - коэффициент передачи делителя. Делитель может отключаться выключателем Вк.
Работает управление на фиг.1, 2 так: органами управления задается изменение взаимного положения рулей и флюгеров. Флюгер в потоке почти не меняет своего положения, по крайней мере этим перемещением в первом приближении можно пренебречь. То есть при изменении взаимного положения отклоняется только руль, допустим на +10°, носком вверх.
Допустим, эффективность рулей такова, что произошло увеличение тангажа на +6°. В обычном управлении "утка" угол руля с потоком стал бы +16°. В предлагаемом управлении флюгер при увеличении тангажа отклонится относительно фюзеляжа носком вниз на 6°, вызвав отклонение руля относительно фюзеляжа носком вниз на 6°. И угол руля с фюзеляжем станет +4°, а с потоком по-прежнему +10°.
При регрессивном варианте управления с эквивалентным коэффициентом передачи 1,5 руль отклонится вниз на 9° /6×1,5/, и угол отклонения руля относительно фюзеляжа станет +1°, а относительно потока 7°. И усилие на руле уменьшится.
Механическое управление на фиг.3 работает так: перемещением оси 0 задается угол отклонения руля 2, допустим, на те же +10°. Флюгер 9 при увеличении тангажа отклонится носком вниз, повернув рычаг 6 влево. Тот через тягу 9 повернет коромысло 8 против часовой стрелки, и коромысло через вторую тягу 9 отклонит вправо рычаг 7, повернув руль 2 носком вниз на те же 6°.
Управление на фиг.4 работает аналогично, но так как рычаг 7 короче рычага 6, а плечи коромысла одинаковы, то при повороте флюгера 3 на 6° руль повернется на 9°.
Управление на фиг.5а работает так: усилием от органа управления сдвигаем муфту 17 /допустим, однозубой вилкой - не показана/ влево или вправо. При этом штырь 14 расклинивает перекрещивающиеся пазы 11 и 13, что вызовет взаимный поворот труб 10 и 12. То есть поворот руля.
Изменение скольжения приведет к синхронному повороту обеих труб и муфты без изменения взаимного положения всех троих.
В регрессивном варианте реборды 18 образуют на муфте винтовую канавку, и упомянутый поворот будет несинхронным, т.к. при неизменном положении однозубой вилки /не показана/ поворот муфты вызовет ее осевое смещение, а значит и изменение взаимного положения труб.
Управление на фиг.6а работает так: при сдвиге шлицевой муфты 17 влево или вправо тяга 20 тянет или толкает рычаг 19, а значит изменяет взаимное положение двух труб. При изменении скольжения обе трубы и муфта синхронно повернутся.
Управление на фиг.6в, 6с работает аналогично, но тяга 20, связанная с муфтой, сначала воздействует на промежуточный рычаг 21 или 22, а тот через вторую такую же тягу воздействует на рычаг 19.
Управление на фиг.7 работает так: при управляемом перемещении верхнего конца второго коромысла 23 его ось 02 воздействует через тягу 9 на золотник 24, что приводит в действие гидроцилиндр 25 и вызывает перемещение руля 2.
При изменении скольжения рычаг 6 через тягу 9 перемещает ось 01 первого коромысла 8. Коромысло 8 закреплено или связано /показано пунктиром/ с нижним концом второго коромысла 23, и это перемещение вызовет перемещение оси 02, которая воздействует на золотник 24. Руль поворачивается за флюгером. Показан регрессивный вариант - рычаг 7 короче рычага 6.
Управление на фиг.8, 9 работает так: управляющее воздействие через датчик Упр. подается на усилитель Ус., который подает энергию на исполнительную машину ИМ. Руль поворачивается до тех пор, пока сигнал от датчика руля Рул./другой полярности/ не компенсирует сигнал Упр.
Появление скольжения приводит к появлению сигнала на датчике Скл., который приводит к появлению сигнала рассогласования на входе в усилитель, и он через ИГЛ поворачивает руль в ту же сторону, что и датчик Скл./сигналы должны быть разной полярности/.
На фиг.9, кроме того, сигнал с датчика Скл. приводит в действие делитель Д., который в определенном диапазоне ослабляет управляющий сигнал с датчика Упр. Управление становится регрессивным.
Делитель на фиг.10 работает так: ползунок переменного резистора, смещаясь в пределах резистора, уменьшает в этом диапазоне передаваемый сигнал. Смещаясь затем на скользящие контакты слева и справа от резистора /показаны пунктиром/, делитель восстанавливает полное управление на закритических режимах полета. См. график на фиг.11.
При выполнении фигур высшего пилотажа может оказаться целесообразным отключение делителя выключателем Вк.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2012 |
|
RU2531706C2 |
| УПРАВЛЕНИЕ "УТКА" -2 /ВАРИАНТЫ/ | 2012 |
|
RU2515817C2 |
| УПРАВЛЕНИЕ "УТКА" - 3 | 2012 |
|
RU2515818C2 |
| ПЕРЕДНЯЯ СТОЙКА ШАССИ /ВАРИАНТЫ/ | 2012 |
|
RU2513347C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2420427C2 |
| САМОЛЕТ СТАРОВЕРОВА (ВАРИАНТЫ) | 2011 |
|
RU2490169C2 |
| ПРОТИВОСАМОЛЕТНАЯ РАКЕТА | 2009 |
|
RU2439476C2 |
| САМОЛЕТ ДЛЯ ПОСАДКИ ПРИ БОКОВОМ ВЕТРЕ (ВАРИАНТЫ) | 2008 |
|
RU2400398C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2504815C2 |
| ВАРИАТИВНОЕ РУЧНОЕ УПРАВЛЕНИЕ САМОЛЕТОМ (ВАРИАНТЫ) | 2012 |
|
RU2505456C1 |
Изобретение относится к области авиации. Система управления самолетом включает руль высоты, который кинематически связан с флюгерной поверхностью, которая всегда стремится расположиться продольно потоку, и руль следует за ней. Кинематическая связь выполнена так, что изменение тангажа приводит к изменению положения руля относительно флюгера. Предусмотрен регрессивный вариант, когда руль поворачивается за флюгером на больший угол, чем флюгер, с возможностью уменьшения управляющего воздействия при увеличении вертикального скольжения. Предусмотрены также варианты механической, гидравлической и электрической связи. Изобретение направлено на предотвращение срыва потока на руле. 15 з.п. ф-лы, 11 ил.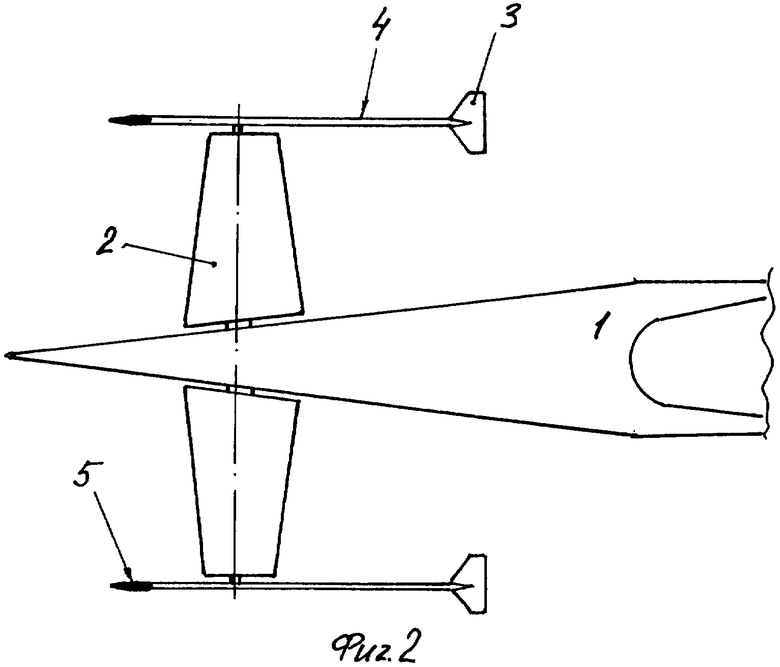
1. Система управления для самолета типа "утка", включающая цельноповоротные рули высоты с органом управления, отличающаяся тем, что она снабжена флюгерами, каждый из которых кинематически, гидравлически или электрически связан с соответствующим рулем высоты с возможностью задания летчиком угла между флюгером и рулем высоты посредством органа управления.
2. Система по п.1, отличающаяся тем, что передаточное отношение по углу поворота органом управления и углом между флюгером и рулем в средней части диапазона управления меньше, чем по краям.
3. Система управления по п.1, отличающаяся тем, что каждый флюгер расположен отдельно от рулей.
4. Система управления по п.1, отличающаяся тем, что каждый флюгер расположен на соответствующем руле.
5. Система управления по п.1, отличающаяся тем, что она снабжена крутильными пружинами, предназначенными для центрирования рулей и флюгеров в горизонтальном положении.
6. Система управления по п.1, отличающаяся тем, что рули и флюгеры снабжены стояночными тормозами.
7. Система управления по п.1, отличающаяся тем, что соответствующие рули и флюгеры имеют механическую кинематическую связь, состоящую из расположенных на осях руля и флюгера противоположно направленных рычагов, которые шарнирно соединены тягами с коромыслом, ось вращения которого закреплена с возможностью перемещения к/от оси руля.
8. Система управления по п.1, отличающаяся тем, что соответствующие рули и флюгеры имеют оси, выполненные как труба в трубе, и расположены соосно.
9. Система управления по п.8, отличающаяся тем, что в одной из труб имеется продольная прорезь, а в другой имеется винтовая прорезь.
10. Система управления по п.8, отличающаяся тем, что на трубах имеются две противоположно-винтовых прорези и в прорези входит штырь, закрепленный на управляющей скользящей втулке, расположенной на наружной трубе.
11. Система управления по п.9, отличающаяся тем, что по меньшей мере одна винтовая прорезь к концам имеет меньший шаг, чем в середине.
12. Система управления по п.1, отличающаяся тем, что оси руля и флюгера выполнены как труба в трубе, в наружной трубе имеется прорезь, через которую проходит рычаг, расположенный на внутренней трубе, причем рычаг соединен наискосок к оси труб тягой с двумя шаровыми шарнирами и с расположенной на наружной трубе шлицевой управляющей муфтой.
13. Система управления по п.1, отличающаяся тем, что оси руля и флюгера выполнены как труба в трубе, в наружной трубе имеется прорезь, через которую проходит рычаг, расположенный на внутренней трубе, причем рычаг соединен двумя такими тягами с расположенной на наружной трубе шлицевой управляющей муфтой через промежуточный одноплечий или двуплечий рычаг.
14. Система управления по п.12, отличающаяся тем, что на управляющей муфте выполнены реборды, которые образуют в рабочем диапазоне углов отклонения руля винтовую канавку, замыкающуюся затем саму на себя.
15. Система управления по п.7, отличающаяся тем, что рычаг флюгера длиннее рычага руля и/или плечо коромысла, к которому прикреплена тяга руля, длиннее второго плеча этого коромысла.
16. Система управления по п.1, отличающаяся тем, что электрическая кинематическая связь состоит из датчиков вертикального скольжения, датчиков положения рулей и датчика положения органа управления, сигналы которых поступают на усилитель и с него на исполнительную машину, при этом датчик органа управления соединен с усилителем через делитель, управляемый сигналом датчика скольжения.
| Способ торможения самолета с цельноповоротными передним и задним горизонтальными оперениями | 1990 |
|
SU1809815A3 |
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ САМОЛЕТА | 1994 |
|
RU2089447C1 |
| АЭРОДИНАМИЧЕСКАЯ СХЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2093417C1 |

