Изобретение относится к ручному управлению рулями высоты и направления, элеронами, элевонами, флаперонами, закрылками, интерцепторами, воздушными тормозами, убирающимся шасси и т.п. самолетов малого и среднего классов (до 20-30 тонн). Механизм может применяться и для компенсации усилия на рулях судов. Известно ручное управление самолетами, см., например, мой пат. №2410286. Однако на больших скоростях, при энергичных маневрах пилотажных самолетов и при большой массе самолетов ручное управление затруднительно. Использование бустерной или электродистанционной систем управления резко повышает стоимость самолета, увеличивает его массу, усложняет конструкцию и, как следствие, снижает надежность управления (чем больше элементов содержит любая система, тем меньше ее надежность). Известно применение на рулях и элеронах аэродинамических роговых компенсаторов, но оно имеет свои недостатки и в последнее время не применяется. Использование триммеров также усложняет и удорожает конструкцию, хотя использование триммеров с данным механизмом на больших самолетах возможно.
Задача изобретения - уменьшение усилий управления простыми и дешевыми техническими средствами.
Технический результат изобретения - уменьшение усилий при ручном управлении различными управляемыми элементами летательных аппаратов.
Данный механизм представляет собой рычажно-пружинный или линейно-пружинный механизм, имеющий положение неустойчивого равновесия и содержащий рычаг, прикрепленный к управляемому элементу (например, к элерону), и/или к органу управления (к штурвалу), и/или к промежуточному кинематическому звену (тяга, качалка) и шарнирно прикрепленную к концу рычага пружину сжатия или растяжения, усилие которой направлено к оси вращения управляемого элемента, или так же прикрепленный пневматический, или гидравлический, или магнитный, или электромагнитный толкатель, также направленный к оси вращения управляемого элемента, причем пружина или толкатель должны крепиться к рычагу и к самолету двумя шарнирами, см. фиг.1. Причем желательно, чтобы по крайней мере один из шарниров был плоским (второй может быть и шаровым), иначе у механизма может появиться степень свободы в продольном по отношению к оси вращения управляемого элемента направлении. Впрочем, при достаточной жесткости упомянутого рычага и шарнирного крепления самого управляемого элемента оба шарнира могут быть и шаровыми. Для облегчения совпадения при сборке плоские шарниры следует выполнять с возможность небольшого продольного смещения.
Технический результат при любом сочетании альтернативных признаков будет идентичным.
Следует пояснить термин «линейно-пружинный механизм». Это продольный элемент, например шток, расположенный в двух направляющих (теоретически может быть и одна, но тогда в ней будут большие контактные усилия), к середине которого шарнирно прикреплена пружина сжатия или пневматический толкатель, см. фиг.3. Такое устройство имеет положение неустойчивого равновесия.
Следует пояснить термин «магнитный толкатель». Это механическая система из двух разнополюсных (они будут притягиваться) или однополюсных (они будут отталкиваться) магнитов, имеющих возможность перемещаться относительно друг друга.
Если используется пружина растяжения, то, чтобы получить положение неустойчивого равновесия, место ее крепления к самолету относительно оси вращения управляемого элемента должно находиться по другую сторону от конца рычага, что затруднительно реализовать при расположении данного механизма на управляемом элементе или на органе управления, но легко может быть реализовано при размещении механизма на промежуточном кинематическом элементе, например на двуплечем рычаге, меняющем направление усилий тяг.
Сила, жесткость, место установки пружины и соотношение длин рычага и пружины в сжатом состоянии должны быть рассчитаны так, чтобы крутящий момент механизма как можно точнее совпадал с крутящим моментом на управляемом элементе при минимальной полетной скорости (посадочной) или был чуть меньше его. Такой механизм является однорежимным. При увеличении скорости на органе управления будут появляться возрастающие усилия, но все же меньшие, чем без данного механизма.
Для того, чтобы лучше соответствовать усилиям управления на разных скоростях, данный механизм может иметь переменное место крепления пружины или толкателя к самолету, то есть этот шарнир может приближаться к оси вращения управляемого элемента (сила пружины при этом будет увеличиваться, а угол ее отклонения возрастать). Для этого могут быть применены все известные устройства, реализующие функцию продольного или близкого к нему дугообразного перемещения: ручной, электрический или гидравлический домкрат или талреп, двуплечий или одноплечий рычаг, эксцентрик в сочетании с направляющими или рычагом и т.п. Тогда данный механизм будет многорежимным или хотя бы двухрежимным. Управление положением шарнира может осуществляться вручную или автоматическим регулятором в зависимости от квадрата скорости. Учитываются изменения положения центра давления при изменении угла атаки и с ростом скорости.
Многорежимный механизм можно получить, управляя давлением в пневмо- или гидротолкателе или управляя напряжением или током в электромагнитном толкателе. Управление должно осуществляться вручную или автоматическим регулятором в зависимости от квадрата скорости.
Но наличие регулятора и соответствующих датчиков давления, скорости, положения усложняет и удорожает конструкцию. Поэтому можно применить пневматическое саморегулирование от набегающего потока. Его давление, как и усилие на элементах управления, изменяется как функция квадрата скорости. Для этого данный механизм содержит в качестве пневматического толкателя пневмоцилиндр, или мембранную коробку, или сильфон, внутренняя полость которых соединена гибким трубопроводом с передней частью крыла, оперения или фюзеляжа, или с патрубком, расположенным навстречу набегающему потоку.
На случай дождя перед пневматическим толкателем имеется водоотделитель в виде полости с двумя патрубками. Или же просто нижняя точка пневмоцилиндра, мембранной коробки или сильфона имеет отверстие, намного меньшее упомянутого трубопровода и сообщающееся с атмосферой в направлении вниз. Поступающая вода будет вытекать из него, и в то же время это отверстие не повлияет заметно на величину давления в упомянутых исполнительных пневмоэлементах.
Но при эксплуатации самолетов в демисезонные периоды возможно замерзание воды в полостях исполнительных пневмоэлементов и обмерзание отверстий или патрубков, расположенных навстречу набегающему потоку. Для предотвращения этого данный механизм может иметь толкатель в виде исполнительного гидроэлемента: гидроцилиндра, мембранной полости или сильфона, заполненных незамерзающей жидкостью (антифризом) и сообщающихся гибким трубопроводом с мембранной коробкой, расположенной на передней или нижней части крыла, оперения или фюзеляжа, причем мембрана обращена наружу навстречу набегающему потоку (технический результат во всех сочетаниях альтернативных признаков идентичен). Предпочтительнее использовать мембранную коробку или сильфон, так как утечки жидкости и трение покоя, какими отличается гидроцилиндр, в данном случае нежелательны.
Но при больших скоростях давление на мембрану на передней части крыла может стать слишком большим для мембраны или сильфона исполнительного механизма. А применение гидроцилиндра, давление в котором допускается больше, как сказано выше, нежелательно. На сверхзвуковых скоростях к этому прибавится еще и аэродинамический нагрев. Поэтому в этих случаях следует применить другую конструкцию: в передней части крыла, или оперения, или фюзеляжа имеется расположенное в направляющих или на параллелограмном механизме обтекаемое тело, которое соединено с расположенным в крыле, оперении или фюзеляже гидравлическим сильфоном, или цилиндром, или мембранной коробкой, которые соединены гибким трубопроводом с данным гидравлическим механизмом. В этом случае, выбрав сечение (например, диаметр) выступающего обтекаемого тела соответственно максимальной скорости полета, можно выбрать приемлемое давление в пневматическом исполнительном механизме данного механизма компенсации и избежать аэродинамического нагрева.
Впрочем, в данном механизме можно применить пневмоцилиндры, несмотря на их указанные недостатки. Точнее, ликвидировав один недостаток и превратив другой в достоинство. Для этого всего лишь надо применить пневмоцилиндры без уплотнительных колец и с небольшим зазором между поршнем и цилиндром. Трение покоя исчезнет, а небольшие утечки воздуха не только не повлияют сколь-нибудь заметно на работу данного механизма, но даже полезны - они играют роль вышеупомянутого отверстия для слива воды. Хотя небольшие лабиринтные уплотнения (кольцевые проточки на поршне) можно применить. Правда, в демисезонный период во избежание замерзания воды цилиндры и патрубок надо немного подогревать (всего лишь до +1 градуса С).
При изменении загрузки возможно потребуется изменить нейтральное положение руля высоты. Это можно сделать обычным триммером, но удобнее сделать это, изменив точку положения неустойчивого равновесия. Для этого шарнир, которым крепится пружина или толкатель к конструкции самолета, должен крепиться подвижно в плоскости, перпендикулярной оси вращения руля - по дуге с центром в указанной оси или хотя бы по касательной прямой линии с возможностью фиксации в любом положении. Если пилот чувствует нагрузку на штурвале, то, изменив положение пружины или толкателя, он может их усилие направить для полной компенсации нагрузки на штурвал.
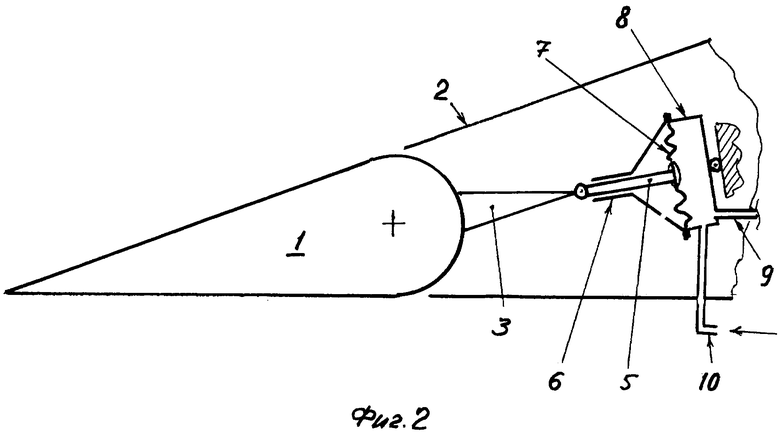
На фиг.1 показан простейший механизм компенсации усилий управления, где: 1 - элерон крыла 2, на элероне имеется рычаг 3, шарнирно соединенный с телескопическим толкающим пружинным блоком 4. Блок в свою очередь шарнирно соединен с конструкцией самолета.
Работает механизм так: при отклонении элерона сочленение рычаг-блок выходит из положения неустойчивого равновесия и компенсирует усилие на элероне.
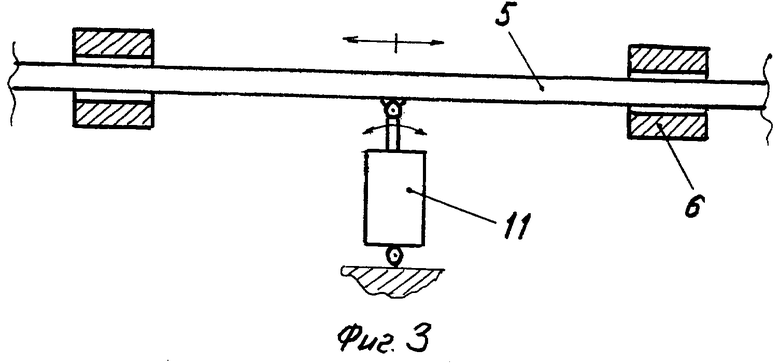
На фиг.2 показан саморегулирующийся пневмовариант механизма: к рычагу 3 шарнирно прикреплен шток 5, расположенный в направляющих 6 и прикрепленный к мембране 7, находящейся в мембранной коробке 8 (все вместе - это пневматический толкатель). Полость мембранной коробки соединена с носком крыла гибкой трубочкой 9 или с патрубком 10 (на эскизе показаны оба варианта одновременно).
Работает механизм так же, как и на фиг.1, но усилие на штоке толкателя увеличивается с ростом скорости адекватно росту усилия на элероне.
На фиг.3 показан линейно-пружинный механизм. В направляющих 6 подвижно размещен шток 5, к которому шарнирно прикреплен толкающий пневмоцилиндр 11, в свою очередь шарнирно прикрепленный к конструкции самолета. При отклонении штока вправо или влево пневмоцилиндр выходит из положения неустойчивого равновесия и стремится сдвинуть шток в ту же сторону.
Варианты механизма с мембраной в передней части крыла или с выступающим обтекаемым телом не показаны, но сам механизм компенсации устроен аналогично фиг.2 и работают эти варианты аналогично.
Данный механизм обладает очень ценными качествами: он дешевый, пневмовариант очень легкий (намного легче гидро- и электроуправления), не требует источника электроэнергии или гидродавления, в отличие от электродистанционного управления он не боится электромагнитного импульса от ядерного взрыва или от электромагнитного взрывного боеприпаса, а вариант с патрубком обладает очень хорошей боевой живучестью (вследствие отсутствия трубопроводов).
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТ ДЛЯ ПОСАДКИ ПРИ БОКОВОМ ВЕТРЕ (ВАРИАНТЫ) | 2008 |
|
RU2400398C2 |
| ВАРИАТИВНОЕ РУЧНОЕ УПРАВЛЕНИЕ САМОЛЕТОМ (ВАРИАНТЫ) | 2012 |
|
RU2505456C1 |
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2007 |
|
RU2410286C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2420427C2 |
| СИСТЕМА СПАСЕНИЯ САМОЛЕТА /ВАРИАНТЫ/ | 2006 |
|
RU2336203C2 |
| АДАПТИВНОЕ РУЧНОЕ УПРАВЛЕНИЕ САМОЛЕТОМ | 2012 |
|
RU2513884C2 |
| Штурмовик - 2 (варианты) | 2017 |
|
RU2655588C1 |
| КОСМОЛЕТ СТАРОВЕРОВА (ВАРИАНТЫ) И АЛГОРИТМ ЕГО РАБОТЫ | 2012 |
|
RU2503592C1 |
| САМОЛЕТ СТАРОВЕРОВА (ВАРИАНТЫ) | 2011 |
|
RU2490169C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА (ВАРИАНТЫ) | 2010 |
|
RU2418713C1 |
Изобретение относится к авиации, а именно к управлению летательными аппаратами. Механизм представляет собой рычажно-пружинный или линейно-пружинный механизм, имеющий положение неустойчивого равновесия и содержащий рычаг, прикрепленный к управляемому элементу, и/или к органу управления, и/или к промежуточному кинематическому звену, и шарнирно прикрепленную к концу рычага пружину сжатия или растяжения. Усилие пружины направлено к оси вращения управляемого элемента. Пружина или толкатель должны крепиться к рычагу и к самолету двумя шарнирами. Обеспечивается уменьшение усилий при ручном управлении различными управляемыми элементами летательных аппаратов. 11 з.п. ф-лы, 3 ил.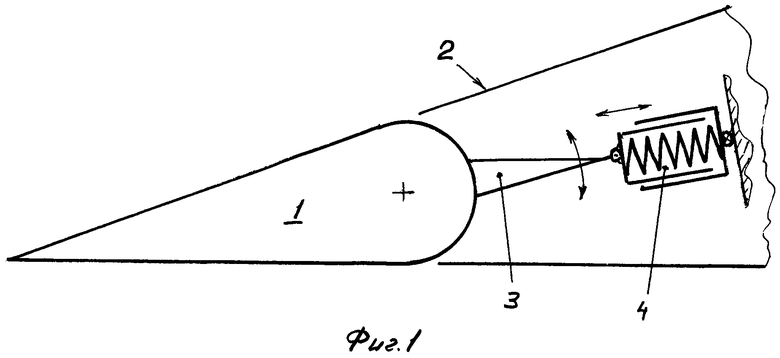
1. Механизм компенсации усилий управления, отличающийся тем, что механизм представляет собой рычажно-пружинный механизм или линейно-пружинный механизм, имеющий положение неустойчивого равновесия и содержащий рычаг, прикрепленный к управляемому элементу, и/или к органу управления, и/или к промежуточному кинематическому звену, и шарнирно прикрепленную к концу рычага пружину сжатия или растяжения, усилие которой направлено к оси вращения управляемого элемента, или пневматический, или так же прикрепленный гидравлический, или магнитный, или электромагнитный толкатель, также направленный к оси вращения управляемого элемента, причем пружина или толкатель должны крепиться к рычагу и к самолету двумя шарнирами.
2. Механизм по п.1, отличающийся тем, что «линейно-пружинный механизм» представляет собой продольный элемент, например шток, расположенный в двух направляющих, к середине которого шарнирно прикреплена пружина сжатия или упомянутый толкатель.
3. Механизм по п.1, отличающийся тем, что «магнитный толкатель» - это механическая система из двух разнополюсных или однополюсных магнитов, имеющих возможность перемещаться относительно друг друга.
4. Механизм по п.1, отличающийся тем, что данный механизм имеет переменное место крепления пружины или толкателя, то есть может приближаться к оси вращения управляемого элемента, для чего применены устройства, реализующие функцию продольного или близкого к нему дугообразного перемещения: ручной, или электрический или гидравлический домкрат или талреп, или двуплечий или одноплечий рычаг, или эксцентрик в сочетании с направляющими или рычагом.
5. Механизм по п.1, отличающийся тем, что управление давлением в пневмотолкателе или в гидротолкателе, или управление напряжением в электромагнитном толкателе осуществляется вручную или автоматическим регулятором в зависимости от квадрата скорости.
6. Механизм по п.1, отличающийся тем, что имеет пневматическое саморегулирование от набегающего потока, для чего данный механизм содержит в качестве пневматического толкателя пневмоцилиндр, или мембранную коробку, или сильфон, внутренняя полость которых соединена гибким трубопроводом с передней частью крыла или фюзеляжа, или с патрубком, расположенным навстречу набегающему потоку.
7. Механизм по п.1, отличающийся тем, что перед пневматическим толкателем имеется водоотделитель в виде полости с двумя патрубками.
8. Механизм по п.1, отличающийся тем, что нижняя точка пневмоцилиндра, или мембранной коробки, или сильфона имеет отверстие, меньшее сечения упомянутого трубопровода и сообщающееся с атмосферой в направлении вниз.
9. Механизм по п.1, отличающийся тем, что имеет толкатель в виде исполнительного гидроэлемента: гидроцилиндра, мембранной полости или сильфона, заполненных незамерзающей жидкостью и сообщающихся гибким трубопроводом с мембранной коробкой, расположенной на передней или нижней части крыла, оперения или фюзеляжа, причем мембрана обращена наружу навстречу набегающему потоку.
10. Механизм по п.6, отличающийся тем, что в передней части крыла, или оперения, или фюзеляжа имеется расположенное в направляющих или на параллелограмном механизме обтекаемое тело, которое соединено с расположенным в крыле, оперении или фюзеляже гидравлическим сильфоном, или цилиндром, или мембранной коробкой, которые соединены гибким трубопроводом с гидравлическим механизмом по п.1.
11. Механизм по п.1, отличающийся тем, что в нем применены пневмоцилиндры без уплотнительных колец и с небольшим зазором между поршнем и цилиндром.
12. Механизм по п.1, отличающийся тем, что шарнир, которым крепится пружина или толкатель к конструкции самолета, крепится подвижно в плоскости, перпендикулярной оси вращения руля - по дуге с центром в указанной оси или по прямой линии с возможностью фиксации в любом положении.
| Способ утепления головной части слитка | 1974 |
|
SU529892A1 |
| ВАЛОК ДЛЯ МАШИН ПО ПЕРЕРАБОТКЕ ПЛАСТМАСС | 1966 |
|
SU223292A1 |
| Способ определения расстояния до места короткого замыкания на линии электропередачи и устройство для его осуществления | 1987 |
|
SU1413562A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 0 |
|
SU300782A1 |
| DE 10202021 C1, 12.06.2003 | |||
| SU 1256353 A1, 20.12.2004 | |||

