Изобретение относится к самодвижущимся подъемно-транспортным средствам, способным передвигаться вверх-вниз с грузом по отвесной поверхности (стене дома, скалы), и может найти применение при проведении монтажно-строительных работ и спасательных мероприятий в высотных зданиях и сооружениях, а также для транспортирования тяжелых грузов по крутому (свыше 30 градусов) склону.
Наиболее эффективно изобретение может быть использовано при пожаротушении и проведении спасательных мероприятий при пожаре в высотных зданиях (небоскребах).
Известно устройство для подъема и спуска пожаротушительного и спасательного оборудования по наружной стене дома с использованием балконов и лоджий, включающее связанные с тяговыми механизмами барабаны с закрепляемым на стене тросом, спасательные лестницы, переносные стойки и платформы с установленными на них, в том числе автоматически действующими, лафетными стволами, пожарными рукавами и т.д.) /1/.
Его недостаток - сложность и трудоемкость использования, значительные временные затраты и недостаточные надежность и безопасность при эксплуатации.
Наиболее близким по целевому назначению может служить установленный по наружной стене дома высотный лифт.
Его недостаток - сложность конструкции, тросовая связанность, постоянство места установки, ограниченность высоты подъема.
Наиболее близким изобретению по конструкции и способу передвижения является известный шагающий подводный аппарат, включающий горизонтальный корпус и установленные по его длине прямолинейно-направляющие механизмы, содержащие связанные с приводами поворотов относительно корпуса траверсы и установленные на них на шарнирно-ползунных устройствах углообразные коромысла с опорными устройствами в виде стоек-опор на противоположных плечах, подвижно соединенных рычагами половинной длины плеча коромысла с траверсами /2/.
Приводами для вертикального поворота траверс, за счет чего производится подъем - опускание стоек-опор противоположных плеч коромысел, служат установленные по концам траверс побортно (вдоль по обе стороны от бортов корпуса) емкости (камеры) переменной плавучести.
А приводами горизонтального поворота коромысел относительно корпуса, обеспечивающими возвратно-поступательное вдоль корпуса перемещение (шагание) стоек-опор, являются установленные на противоположных плечах коромысел горизонтальные винтовые движители.
При вертикальном повороте траверс происходит бортовая смена: с подъемом - опусканием стоек-опор противоположных плеч коромысел, а при горизонтальном повороте коромысел - отталкивание от поверхности дна опустившимися на грунт стойками-опорами.
Аппарат-прототип находится над поверхностью дна на плаву и передвигается за счет отталкивания от поверхности дна поочередно стойками-опорами противоположных плеч коромысел прямолинейно-направляющих механизмов.
Недостатком прототипа является его неспособность устойчивого (без постоянной гидроподдержки) передвижения вне водной среды, как из-за отсутствия механизма согласованного перемещения опорных устройств его прямолинейно-направляющих механизмов, так и из-за неприменимости для сухопутного передвижения используемых приводов. При этом его опорные устройства предназначены исключительно для отталкивания от твердой поверхности.
Эти недостатки исключают способность прототипа осуществлять сухопутное передвижение вообще, а передвижение по отвесной поверхности вверх-вниз - тем более.
С целью самостоятельного устойчивого передвижения по твердой отвесной поверхности (стене) вверх-вниз с полезным грузом и прочного временного закрепления на ней и предлагается данное изобретение.
Поставленная цель достигается тем, что на корпусе установлены не менее чем две группы, содержащие, каждая, не менее трех прямолинейно-направляющих механизмов, взаимодействующих согласованно между собой и приводами с возможностью одновременного, с поочередной сменяемостью нахождения одних групп в состоянии разнобортного (в разные стороны от корпуса) вертикального поворота траверс с образованием попеременно опорными устройствами противоположных плеч коромысел опорных многоугольников, а других - в состоянии горизонтального поворота коромысел с образованными опорными многоугольниками.
Причем опорные устройства на противоположных плечах коромысел прямолинейно-направляющих механизмов выполнены с возможностью автоматического закрепления на твердой отвесной поверхности (стене) при опускании и постановке на нее и открепления от нее при подъеме.
В частности, на корпусе установлены две группы, содержащие одна четыре, например (1-2-5-6), а другая - четыре (3-4-7-8) (в порядке последовательного расположения по длине корпуса) прямолинейно-направляющих механизма, взаимодействующих согласованно между собой и приводами с возможностью одновременного, с поочередной сменяемостью нахождения одной группы в состоянии разнобортного вертикального поворота траверс с образованием попеременно опорными устройствами противоположных плеч коромысел опорного четырехугольника, а другой - в состоянии горизонтального поворота коромысел с образованным опорным четырехугольником.
Для обеспечения автоматического закрепления на отвесной поверхности (стене) при опускании и открепления от нее при подъеме, опорные устройства прямолинейно-направляющих механизмов выполнены в виде установленных по концам противоположных плеч коромысел автоматических бурильных или вибродолбежных устройств с рабочими инструментами (сверлами или долотами) с возможностью внедрения (забуривания) в твердую отвесную поверхность (стену) и временного закрепления в ней при их опускании и высвобождения из нее при их подъеме.
В другом варианте опорные устройства на противоположных плечах коромысел прямолинейно-направляющих механизмов выполнены в виде автоматических вакуумных устройств с присосками с возможностью присасывания ими к отвесной поверхности (стене) и временного закрепления на ней при их опускании и освобождения от нее при их подъеме.
При всем при этом подъемно-транспортная машина установлена на самоходной тележке с возможностью подъезда к отвесной поверхности (стене) и занятия, в том числе автоматического, у стены рабочего положения с прижатыми к ней опорными устройствами.
Способ передвижения описываемой машины вверх-вниз по отвесной поверхности (стене) с временным закреплением на ней, заключающийся в попеременном перемещении опорных устройств противоположных плеч коромысел прямолинейно-направляющих механизмов, состоит в том, что попеременное перемещение опорных устройств производят с образованием поочередно сменяющими друг друга группами прямолинейно-направляющих механизмов, в частности группами (1-2-5-6) и (3-4-7-8) опорных многоугольников (четырехугольников).
Причем при постановке на отвесную поверхность (стену) опорных устройств опорного многоугольника (четырехугольника) каждой группы прямолинейно-направляющих механизмов производят их автоматическое прочное закрепление в (на) ней путем внедрения (забуривания) в стену их рабочих инструментов (сверл, вибродолот) или присасывания к ее поверхности их присосок, а при их подъеме - освобождение последних от нее. В периоды смены опорных многоугольников (четырехугольников) и останова движения опорные устройства всех групп прямолинейно-направляющих механизмов оставляют временно закрепленными.
При этом с целью повышения надежности закрепления на отвесной поверхности (стене) внедрение (забуривание) рабочих инструментов (сверл, долот) в нее производят под углом к ее поверхности, отличном от нормального, то есть под углом, меньшим или большим 90 градусов.
Наличием в каждой группе не менее трех прямолинейно-направляющих механизмов достигается возможность при разнобортных (в стороны противоположных бортов) вертикальных поворотах их траверс образования попеременно опорами противоположных плеч коромысел устойчивых опорных многоугольников (четырехугольников), надежно удерживающих машину на отвесной поверхности (стене).
А наличие минимально двух групп прямолинейно-направляющих механизмов обеспечивает возможность поочередной, на каждом шаге сменяемости образуемых каждой группой опорных многоугольников (четырехугольников), обеспечивающей шаговое передвижение машины без потери устойчивости и срыва с отвесной поверхности (со стены).
Изобретение поясняется на следующих чертежах.
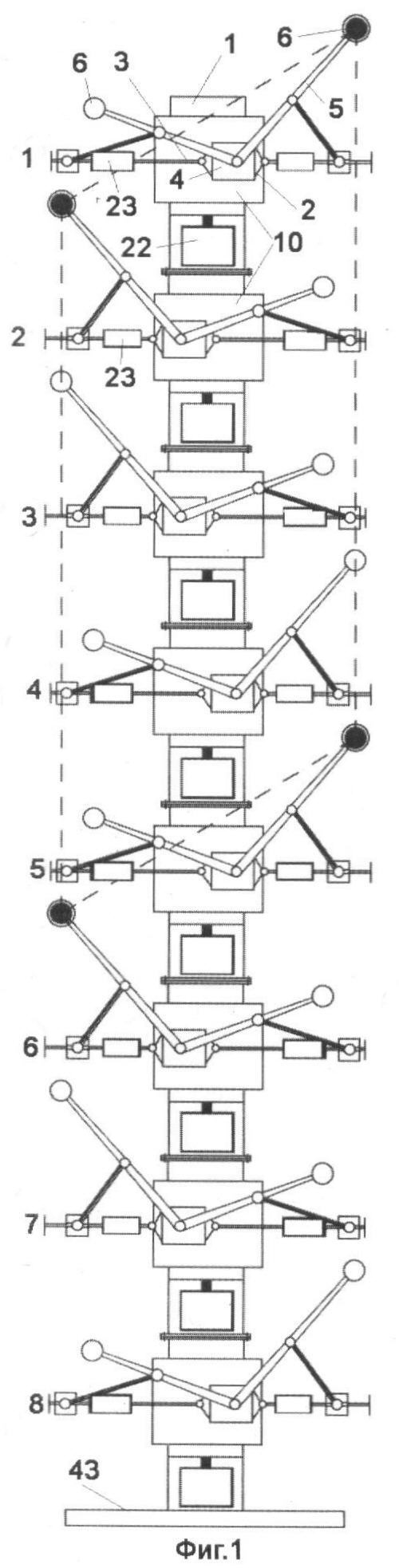
На фиг.1 показана конструкция описываемой машины.
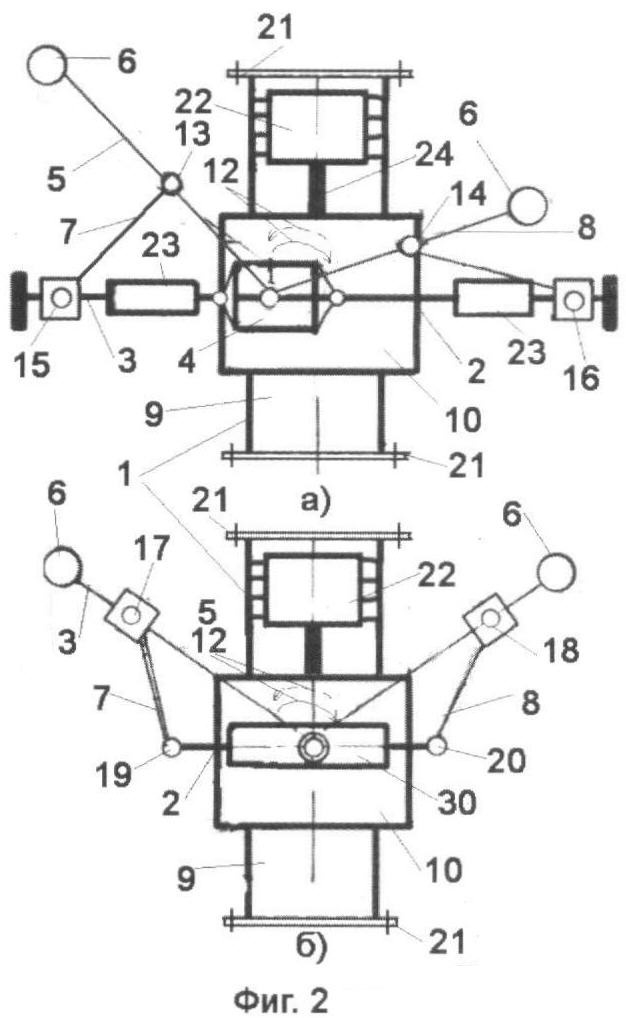
На фиг.2 показана конструкция модулей ходового механизма.
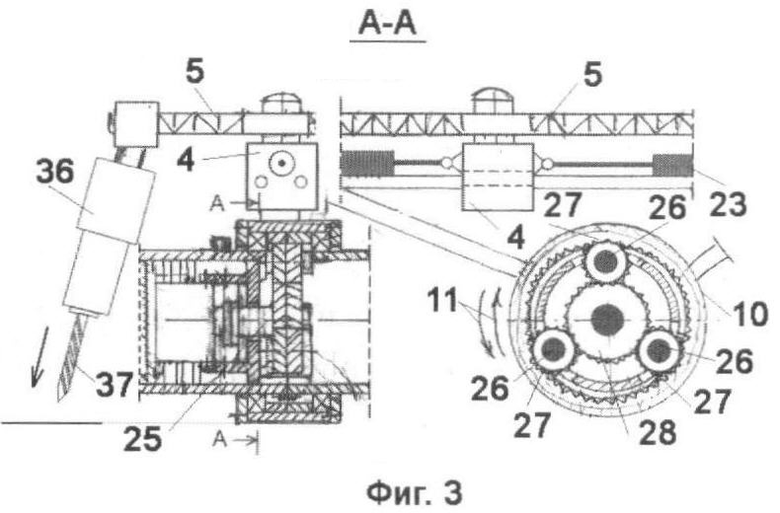
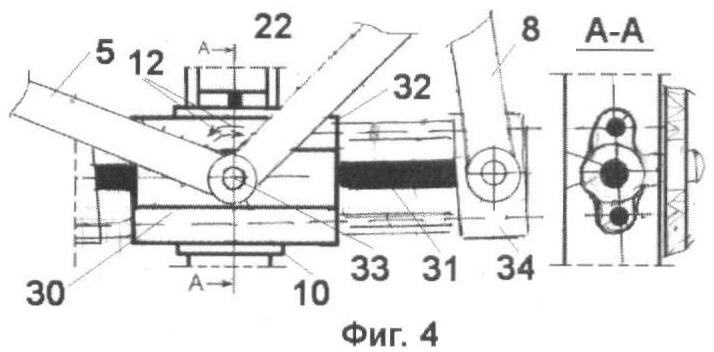
На фиг.3 и 4 показана конструкция приводов ходового механизма.
На фиг.5 показана конструкция опорных устройств.
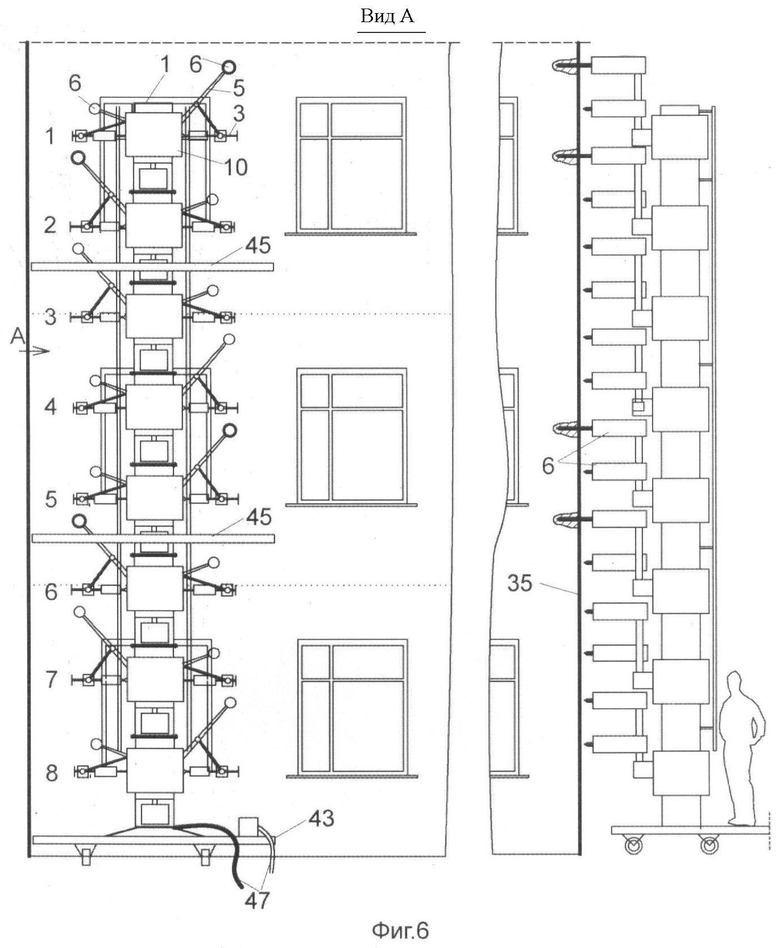
На фиг.6 показано положение описываемой машины при передвижении по стене дома.
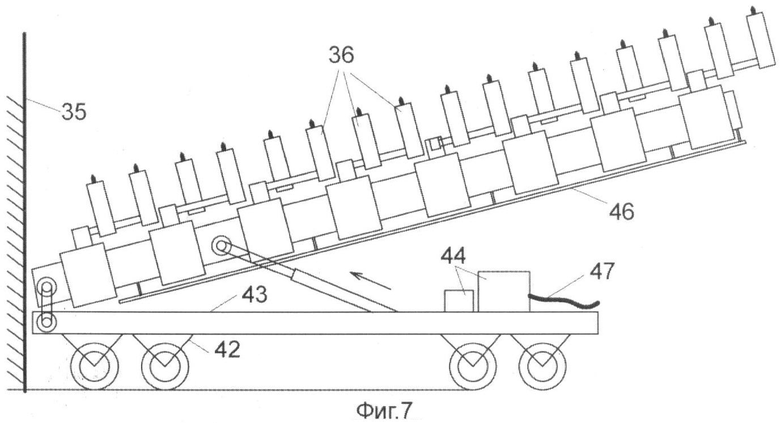
На фиг.7 показано положение машины на транспортной тележке.
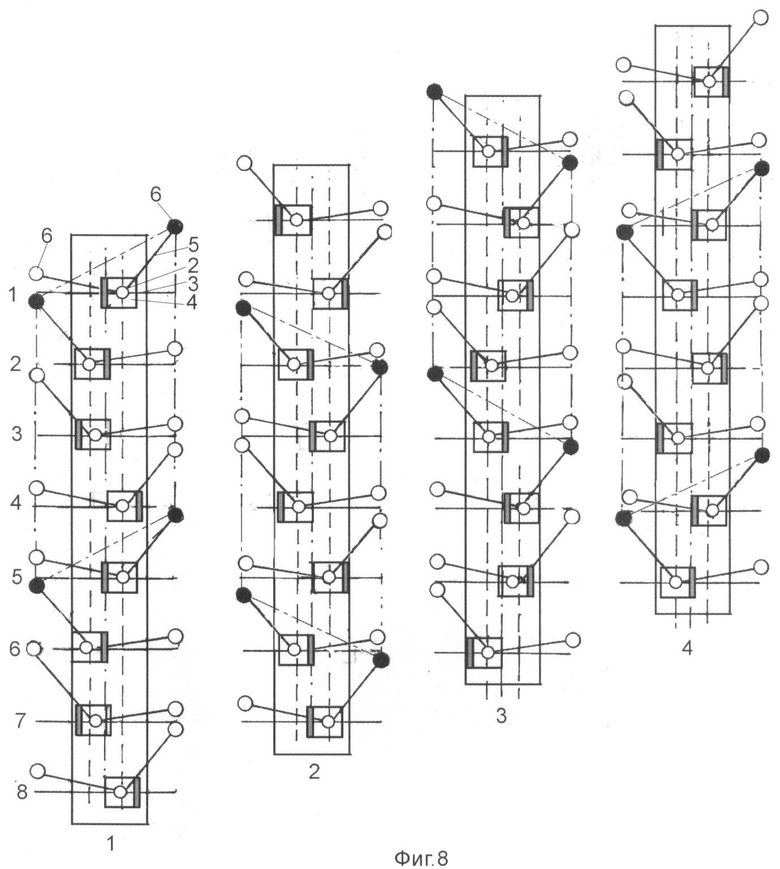
На фиг.8 показана фазовая схема передвижения машины по отвесной поверхности (стене).
Описываемая самодвижущаяся подъемно-транспортная машина включает горизонтальный корпус 1 и установленные последовательно по его длине прямолинейно-направляющие механизмы (далее ПНМ) 2, содержащие связанные с приводами поворота относительно корпуса 1 траверсы 3 и установленные на них на шарнирно-ползунных устройствах (далее ШПУ) 4 углообразные коромысла 5 с опорными устройствами 6, установленными на противоположных плечах, соединенных подвижно рычагами 7 и 8 половинной длины плеча коромысла 5 с траверсами 3 (фиг.1).
При этом на корпусе 1 установлены не менее чем две группы, содержащие, каждая, не менее трех ПНМ 2, взаимодействующих согласованно между собой и приводами с возможностью одновременного, с поочередной сменяемостью нахождения одних групп ПНМ в состоянии разнобортного (в разные стороны от корпуса 1) вертикального поворота их траверс 3 с образованием попеременно опорными устройствами 6 противоположных плеч коромысел 5 опорных многоугольников, а других групп ПНМ 2 - в состоянии горизонтального поворота их коромысел 5 с образованными опорными многоугольниками.
В частности, как показано на фиг.1, на корпусе установлены две группы ПНМ 2, содержащие одна четыре, например (1-2-5-6), а другая - четыре (3-4-7-8), в порядке последовательного расположения ПНМ по длине корпуса 1 (на чертеже ПНМ пронумерованы вертикальным столбцом цифр). Эти группы ПНМ взаимодействуют согласованно между собой и приводами с возможностью одновременного, с поочередной сменяемостью нахождения одной группы ПНМ (как показано на чертеже в данный момент группы ПНМ (3-4-7-8)) в состоянии разнобортного вертикального поворота их траверс 3 с образованием попеременно опорными устройствами 6 противоположных плеч коромысел 5 опорного четырехугольника, а другой (в данный момент группы ПНМ (1-2-5-6)) - в состоянии горизонтального поворота их коромысел 5 с образованным опорным четырехугольником.
На фиг.1 опустившиеся и прикрепившиеся к стене опорные устройства 6 группы ПНМ (1-2-5-6) отмечены закрашенными окружностями, а образованный ими шагающий опорный четырехугольник выделен пунктиром.
ПНМ 2 могут быть установлены как сверху на корпусе 1 (фиг.1), так и под ним (как показано на фиг.7).
При всем при этом опорные устройства 6 на противоположных плечах коромысел 5 выполнены с возможностью автоматического прикрепления и закрепления на отвесной поверхности (стене) при их опускании и постановке на нее и открепления от нее при их подъеме.
Наличием в каждой группе не менее трех ПНМ 2 достигается возможность (при разнобортных вертикальных поворотах их траверс 3) образования попеременно опорными устройствами 6 противоположных плеч коромысел 5 опорных многоугольников (трех-, четырех- и более угольников), обеспечивающих надежность устойчивого положения машины на отвесной поверхности (стене).
А наличие минимально двух групп ПНМ обеспечивает возможность поочередной, на каждом шаге сменяемости образованных каждой группой опорных многоугольников (четырехугольников) без потери при этом устойчивости положения машины на поверхности (стене).
Этим самым, а также возможностью при этом опорных устройств 6 на каждом шаге прочного прикрепления к твердой отвесной поверхности (стене) и открепления от нее обеспечивается надежное поступательное передвижение машины по ней.
Конструктивно описываемая машина с ее ходовой частью может быть выполнена состоящей из отдельных модулей, каждый из которых содержит, в частности, цилиндрический корпус 9 (являющийся составной частью общего корпуса 1), на котором на поворотном устройстве 10 установлен связанный с приводами вертикального поворота траверс 3 (показано стрелкой 11) и горизонтального поворота коромысел 5 (показано стрелкой 12) ПНМ 2 (фиг.2).
При этом в одном варианте ПНМ 2 может содержать углообразное коромысло 5, середины противоположных плеч которого соединены с рычагами 7 и 8 шарнирами 13 и 14, а рычаги 7 и 8 с траверсой 3 - с помощью шарнирно-ползунных устройств 15 и 16 (фиг.2а).
В другом варианте с целью снижения поперечного размера за счет уменьшения длины траверсы 3 ПНМ 2 содержит углообразное коромысло 5, середины противоположных плеч которого соединены с рычагами 7 и 8 с помощью шарнирно-ползунных устройств 17 и 18, а рычаги 7 и 8 с траверсой 3 - шарнирами 19 и 20 (фиг.2б).
21 - стыковочные узлы для последовательной состыковки модулей в единую конструкцию корпуса 1 и ходового механизма машины
Приводами вертикального поворота (стрелки 11) траверс 3, обеспечивающими бортовую смену с подъемом - опусканием опорных устройств 6 противоположных плеч коромысел 5, служат моментные гидродвигатели возвратно-поворотного действия 22, а приводами горизонтального поворота (стрелки 12) коромысел 5, обеспечивающими шагательные перемещения вдоль бортов корпуса 1 опорных устройств 6, - силовые гидроцилиндры 23 (фиг.3).
Конструкция моментных гидродвигателей возвратно-поворотного действия 22 и силовых гидроцилиндров 23 известна.
В описываемой машине моментный гидродвигатель 22 закреплен корпусом в трубчатом корпусе 9 модуля и штоком 24 через посредство передаточного механизма 25 той или иной конструкции связан с поворотным устройством 10 траверсы 3 с возможностью прямого и возвратного поворота (стрелки 11) относительно корпуса 9 (фиг.3).
Передаточный механизм 25 содержит сателлиты 26, взаимодействующие с внутренней зубчаткой поворотного устройства 10.
27 - установочные щелевые окна в корпусе 9 модуля для сателлитов 26.
28 - ведущая шестерня гидродвигателя 22.
Силовые гидроцилиндры 23 горизонтального поворота коромысла 5 расположены вдоль траверсы 3, их неподвижные корпусы закреплены на корпусах 9 модулей или на самих траверсах 3, а подвижные штоки 29 шарнирно соединены с ШПУ 4 коромысла 5 (см. сечение по А-А на фиг.3).
С целью компактности конструкции привод горизонтального поворота коромысла 5 содержит силовой гидроцилиндр двухстороннего действия 30, неподвижный шток 31 которого закреплен концами на корпусе 9 модуля и служит траверсой 3, а подвижной корпус 32 снабжен шарнирным узлом 33 для установки коромысла 5 и является ШПУ 4 (фиг.4).
С целью повышения надежности работы исключением возможности проворота коромысла 5 относительно траверсы 3 ПНМ 2 выполнен содержащим взаимно параллельные сдвоенные, строенные и более траверсы 3 с едиными для них шарнирно-ползунными устройствами 34 (см. фиг.4).
Для автоматического прикрепления и закрепления на отвесной поверхности (стене) 35 при опускании и постановке на нее и открепления от нее при подъеме опорные устройства 6 на противоположных плечах коромысел 5 ПНМ 2 выполнены в виде автоматических буровых 36 (фиг.5а) или долбежных устройств (с рабочими инструментами 37 в виде сверл и вибродолот соответственно) с возможностью при их опускании внедрения (забуривания) в твердую отвесную поверхность (стену) 35 и временного закрепления в ней, и высвобождения из нее при их подъеме
Конструкция таких устройств (типа дрелей, перфораторов) известна.
В другом варианте опорные устройства 6 на противоположных плечах коромысел 5 ПНМ 2 выполнены в виде автоматических вакуумных устройств 38 с присосками с возможностью при опускании присасывания ими к отвесной поверхности (стене) 35 и временного закрепления на ней, и освобождения от нее при подъеме (фиг.5б).
Присоски могут быть выполнены в виде прочных колпаков 39 с упругоэластичными губами 40 и связаны шлангами 41 с вакуумным насосом (не показан), откачивающим из-под них воздух для присасывания и нагнетающим воздух для освобождения от стены 35.
И буровые, вибродолбежные устройства 36, и вакуумные устройства 38 с присосками 39, как и приводы ПНМ 2 связаны с управляющими их совместной работой в согласованном автоматическом режиме электронными устройствами (органом автоматического управления), которые могут находиться и (или) на земле, и (или) на самой машине.
На фиг.6 показано положение описываемой машины в рабочем состоянии в процессе передвижения по стене дома. Внедренные в поверхность стены 35 (см. вид по стрелке А фиг.6) опорные устройства 6 (сверла бурильных устройств) группы ПНМ (1-2-5-6), образующие в данный момент времени опорный четырехугольник (выделен пунктиром), отмечены условно закрашенными окружностями.
Для подъезда, в том числе самостоятельного, к отвесной поверхности (стене) 35 и занятия, в том числе автоматического, у стены рабочего вертикального положения с прижатыми к ней опорными устройствами 6 описываемая подъемно-транспортная машина установлена на самоходной тележке 42, с платформой 43, на которой могут быть размещены различные обслуживающие машину агрегаты и устройства (условно 44) (фиг.7).
Например, при пожаротушении и проведении спасательных работ на тележке-платформе могут находиться средства пожаротушения, в том числе автоматически действующие по команде с земли, сами пожарники, специальные и спасательные средства и т.д.
Для спасения людей на корпусе 1 машины могут быть установлены дополнительные раскладывающиеся платформы 45 (или люльки), а также соединяющая их лестница 46.
47 - связанные с наземными средствами обеспечения коммуникации (гидрошланги, электрокабели и т.д.).
Для самостоятельного передвижения по крутым (свыше 30-40 град.) склонам машина освобождается от тележки 42 и платформ 43, 45 и оборудуется в соответствии с новым назначением.
Способ передвижения описываемой машины, заключающийся в попеременном перемещении опорных устройств 6 противоположных плеч коромысел 5 ПНМ 2, состоит в том, что это попеременное перемещение осуществляют с образованием поочередно сменяющими друг друга группами ПНМ, в частности группами (1-2-5-6) и (3-4-7-8) опорных многоугольников (четырехугольников).
Причем при постановке на отвесную поверхность (стену) опорных устройств 6 опорного многоугольника (четырехугольника) каждой группы ПНМ путем автоматического на каждом шаге внедрения (забуривания) в твердую отвесную поверхность (стену) 35 их рабочих инструментов (сверл, долот) 37 или присасывания к ее поверхности присосками 38 при опускании на нее производят их прочное закрепление на ней, а при их подъеме - путем автоматического извлечения (открепления) последних из (от) стены их освобождение.
Причем в периоды останова движения для поочередной смены опорных многоугольников (четырехугольников) опорные устройства 6 оставляют временно (на расчетный, запланированный период времени) закрепленными (прикрепленными) в (к) стене 35.
При этом для большей надежности закрепления на отвесной стене внедрение (забуривание) в нее рабочих инструментов (сверл, долот) 37 опорных устройств 6 производят под углом к ее поверхности, несколько отличном от 90 градусов (см. фиг.5). То есть α>90 или α<90 градусов. Этим исключается возможность самопроизвольного высвобождения из стены рабочего инструмента (сверла, долота) 37 при возникновении нормально направленных к ее поверхности (отрывающих от стены) внешних сил.
На фиг.8 показана кинематическая схема способа передвижения машины по отвесной поверхности (стене) 35. Как и ранее, закрашенными окружностями отмечены опорные устройства 6, находящиеся в данный момент в прикрепленном к стене 6 (внедренном в стену) состоянии с образованием опорного четырехугольника (выделен пунктиром). Вертикальным столбцом цифр 1, 2, 3, 4, 5, 6, 7, 8 отмечены номера ПНМ. Горизонтальной строкой цифр 1, 2, 3, 4… указаны шаговые периоды (фазы) передвижения (шагания) машины.
Согласно этой схеме сначала делает шаг опорным четырехугольником группа ПНМ (1-2-5-6) (позиция 1), в то время как группа (3-4-7-8) находится в фазе смены своего опорного четырехугольника. Затем (позиция 2) после постановки опорных устройств 6 на поверхность стены 35 и внедрения в нее рабочих инструментов 37 шагает опорным четырехугольником группа ПНМ (3-4-7-8), в то время как ПНМ (1-2-5-6) меняет опорные устройства одних плеч коромысел 5 на противоположные с образованием нового опорного четырехугольника, которым затем (позиция 3) шагает. И так далее. В периоды останова машина остается закрепленной опорными устройствами 6 опорных четырехугольников обеих групп ПНМ (на схеме не показано).
Использованные источники информации
/1/. Патент РФ №2174025, МКИ A62B 1/00, 2001.
/2/. Патент РФ №2214940, МКИ B63G 8/00, E21C 50/00, 2003 г. - прототип.

Изобретение относится к подъемно-транспортному машиностроению, а именно к самодвижущимся подъемно-транспортным средствам, способным передвигаться по крутой и отвесной поверхности. Машина содержит корпус, на котором установлены не менее чем две группы прямолинейно-направляющих механизмов. Каждая группа содержит не менее трех упомянутых механизмов, взаимодействующих согласованно между собой и приводами с возможностью одновременного, с поочередной сменяемостью нахождения одних групп в состоянии разнобортного вертикального поворота траверс и с образованием попеременно опорными устройствами противоположных плеч коромысел опорных многоугольников, а других - в состоянии горизонтального поворота коромысел с образованием опорными устройствами многоугольников. Опорные устройства на противоположных плечах коромысел прямолинейно-направляющих механизмов выполнены с возможностью автоматического закрепления на твердой отвесной поверхности (стене) при опускании на нее и открепления от нее при подъеме. Изобретение обеспечивает самостоятельное передвижение машины вверх-вниз по твердой отвесной поверхности (стене) с полезным грузом. 2 н. и 4 з.п. ф-лы, 8 ил.
1. Подъемно-транспортная машина, включающая горизонтальный корпус и установленные последовательно по его длине прямолинейно направляющие механизмы, содержащие связанные с приводами поворота относительно корпуса траверсы и установленные на них на шарнирно-ползунных устройствах углообразные коромысла с опорными устройствами на противоположных плечах, отличающаяся тем, что на корпусе установлены не менее чем две группы, содержащие каждая не менее трех прямолинейно направляющих механизмов, взаимодействующих согласованно между собой и приводами с возможностью одновременного с поочередной сменяемостью нахождения одних групп в состоянии разнобортного вертикального поворота траверс с образованием попеременно опорными устройствами противоположных плеч коромысел опорных многоугольников, а других групп - в состоянии горизонтального поворота коромысел с образованными опорными многоугольниками, причем опорные устройства на противоположных плечах коромысел прямолинейно направляющих механизмов выполнены с возможностью автоматического закрепления на твердой отвесной поверхности (стене) при опускании на нее и открепления от нее при подъеме.
2. Подъемно-транспортная машина по п.1, отличающаяся тем, что на корпусе установлены две группы, содержащие одна четыре (1-2-5-6), а другая - четыре (3-4-7-8) в порядке последовательного расположения по длине корпуса прямолинейно направляющих механизма, взаимодействующих согласованно между собой и приводами с возможностью одновременного с поочередной сменяемостью нахождения одной группы в состоянии разнобортного вертикального поворота траверс с образованием попеременно опорными устройствами противоположных плеч коромысел опорных четырехугольников, а другой - в состоянии горизонтального поворота коромысел с образованным опорным четырехугольником, причем опорные устройства на противоположных плечах коромысел выполнены с возможностью автоматического закрепления на твердой отвесной поверхности (стене) при опускании на нее и открепления от нее при подъеме.
3. Подъемно-транспортная машина по п.1 или 2, отличающаяся тем, что опорные устройства прямолинейно направляющих механизмов выполнены в виде установленных по концам противоположных плеч коромысел бурильных или вибродолбежных устройств с возможностью автоматического внедрения в твердую отвесную поверхность (стену) их рабочих инструментов (сверл, долот) при опускании на нее и высвобождения последних из нее при подъеме.
4. Подъемно-транспортная машина по п.1 или 2, отличающаяся тем, что опорные устройства прямолинейно направляющих механизмов выполнены в виде установленных по концам противоположных плеч коромысел вакуумных присосок с возможностью автоматического присасывания к твердой отвесной поверхности (стене) при опускании на нее и освобождения от нее при подъеме.
5. Подъемно-транспортная машина по п.1 или 2, отличающаяся тем, что установлена на самоходной тележке с возможностью занятия при подъезде к отвесной поверхности (стене) вертикального рабочего положения с прижатыми к последней опорными устройствами.
6. Способ передвижения машины вверх-вниз по твердой отвесной поверхности (стене), заключающийся в попеременном перемещении опорных устройств с их автоматическим прочным закреплением при постановке и откреплением при подъеме, отличающийся тем, что попеременное перемещение опорных устройств осуществляют поочередно сменяющими друг друга группами прямолинейно направляющих механизмов с образованием в каждой группе опорными устройствами опорных многоугольников (четырехугольников), при этом открепление опорных устройств сменяемой группы прямолинейно направляющих механизмов производят после постановки и закрепления опорных устройств опорного многоугольника (четырехугольника) сменяющей группы прямолинейно направляющих механизмов.
| JP 2003062771 A, 05.03.2003 | |||
| EP 0401120 A, 05.12.1990 | |||
| ПЛАВУЧЕ-ШАГАЮЩИЙ ДОННЫЙ АППАРАТ | 2001 |
|
RU2214940C2 |
| JP 58209667 A, 06.12.1983 | |||
| US 4662465 A, 05.05 | |||
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |

