Изобретение относится к горной (горно-морской) технике, касается подводных многофункциональных транспортно-технологических аппаратов и может найти применение при проведении различных производственных и инженерно-строительных работ на дне моря и при промышленном освоении минерально-сырьевых ресурсов Мирового океана.
Наиболее эффективно изобретение может быть использовано при глубоководной разработке месторождений полезных ископаемых, например железо-марганцевых конкреций (ЖМК), в качестве добычного аппарата и при оборудовании и обслуживании различных инженерно-технических и строительных объектов в качестве рабочего аппарата, траншеекопателя, трубо- и кабелеукладчика, бульдозера, тягача для перемещения по дну моря тяжелых грузов и т.д.
Известен разработанный японской фирмой "Камацу" многофункциональный технологический подводный шагающий аппарат "RECUS " [1].
Аппарат с шагающим движителем содержит горизонтально расположенную жесткую раму и установленную на ней сверху на направляющих и вертикальной оси раму-каретку. Рама и каретка имеют выдвижные вертикальные стойки-опоры.
Рама и каретка связаны с приводами, осуществляющими их перемещение друг относительно друга и взаимный поворот в горизонтальной плоскости.
Рабочий орган аппарата с взаимодействующими с поверхностью дна устройствами установлен на каретке под рамой и перемещается вместе с ней в пределах расстояния между стойками-опорами этой рамы.
Механизм движения аппарата по поверхности дна и его полезная работа заключаются в том, что, когда рама с поднятыми стойками-опорами перемещается относительно стоящей на грунте каретки, аппарат делает один шаг. После этого стойки-опоры рамы опускаются, а верхняя каретка с поднятыми стойками-опорами перемещается по направляющим вдоль нее, делая приставной шаг. В процессе перемещения каретки установленный на ней рабочий орган производит (в пределах расстояния между стойками-опорами рамы) полезную работу. Затем каретка становится на грунт, а рама с поднятыми стойками-опорами, перемещаясь вдоль каретки по направлению движения аппарата, делает следующий шаг. И так далее.
Изменение направления движения (поворота) аппарата производится путем поворота каретки с поднятыми стойками-опорами (при стоящей на грунте раме) на заданный угол вокруг вертикальной оси в сторону изменения направления движения аппарата, после чего каретка становится на грунт, а рама с поднятыми стойками-опорами поворачивается относительно стоящей на грунте каретки на такой же угол.
Недостаток известного аналога состоит в необходимости поочередного подъема и выдвижения стоек опор рамы и каретки в процессе шагания и необходимости использования многочисленных приводов, в том числе отдельно для рабочего органа, что усложняет управление работой аппарата и снижает его надежность.
Наиболее близким аналогом является известный плавуче-шагающий донный аппарат, включающий горизонтально расположенный корпус-ферму (балку) и установленные на нем стойки-опоры, герметичные емкости (камеры) плавучести с регулируемой попеременно изменяемой положительной и отрицательной плавучестью, винтовые тяговые движители и рабочий орган [2].
Стойки-опоры, емкости (камеры) плавучести и винтовые движители установлены на концах корпуса.
Емкости (камеры) плавучести закреплены над стойками-опорами, частично заполнены балластной жидкостью и связаны между собой трубопроводом, соединенным с насосом, осуществляющим перекачку балластной жидкости поочередно из одной емкости в другую, обеспечивая тем самым регулируемую попеременно изменяемую положительную и отрицательную их плавучесть.
Рабочий орган подвешен под корпусом, снабжен приводом и перемещается по направляющим между концевыми стойками-опорами.
Для передвижения аппарата балластная жидкость насосом перекачивается из одной концевой емкости (камеры) плавучести в другую, в результате чего облегченная емкость подвсплывает вместе с концом корпуса, на котором она установлена. За счет работы горизонтального тягового движителя этот подвсплывший конец корпуса получает угловое перемещение относительно стоящей на грунте стойки-опоры. Таким образом, аппарат делает один (угловой) шаг.
Затем балластная жидкость насосом перекачивается обратно в первую емкость, корпус принимает горизонтальное положение, а рабочий орган, перемещаясь вдоль него, производит в пределах длины корпуса полезную работу. Затем балластная жидкость перекачивается из второй камеры в первую, второй конец корпуса подвсплывает и с помощью установленного на нем горизонтального движителя поворачивается относительно стоящей на грунте опоры другого конца корпуса на заданный угол, и аппарат аналогичным образом делает следующий угловой шаг. И так далее.
Шагая поочередно то одним подвсплывшим концом корпуса, то другим, аппарат перемещается по зигзагообразной траектории.
Изменение фронтального направления движения производится за счет изменения (увеличения или уменьшения) угла зашагивания одного конца корпуса по сравнению с углом зашагивания другого его конца.
Существенными недостатками известного аппарата-прототипа, которые устраняются описываемым изобретением, являются:
- непрямолинейность (зигзагообразность) траектории поступательного движения аппарата по поверхности дна, так как при зашагивании подвсплывший конец корпуса перемещается относительно стоящего на стойке-опоре другого его конца по дугообразной траектории; этот недостаток не позволяет выполнять рабочие (технологические) операции, требующие прямолинейной траектории перемещения корпуса аппарата;
- поперечное к фронтальному направлению передвижения аппарата перемещение рабочего органа не позволяет производить определенные виды работ, например, копать непрерывную и прямолинейную в направлении поступательного движения аппарата траншею (в частности, для прокладки кабеля, труб);
- ограниченность тягового усилия вследствие того, что упор корпуса при подвсплывшим одним из его концов обеспечивается только заглубленной в грунт стойкой-опорой другого его конца; в условиях слабых грунтов и при необходимости иметь значительные рабочие (тяговые) усилия упор, создаваемый только одной концевой стойкой-опорой, может оказаться недостаточным;
- периодический отрыв рабочего органа от поверхности дна вместе с подвсплывшим корпусом аппарата делает невозможным выполнять полезную работу непрерывно в процессе передвижения аппарата;
- необходимость на каждом шаге осуществлять поочередное подвсплытие одного конца корпуса аппарата относительно другого его конца приводит к появлению непроизводительных энергозатрат, повышению энергоемкости аппарата.
Вышеперечисленные недостатки в своей совокупности снижают эффективность работы и функциональные возможности аппарата-прототипа, сужают область его использования (применения).
С целью устранения вышеуказанных недостатков прототипа, обеспечения прямолинейности поступательного перемещения его корпуса и увеличения тягового усилия при снижении энергоемкости и предлагается данное изобретение.
Поставленная цель достигается тем, что стойки-опоры, емкости плавучести с регулируемой попеременно изменяемой положительной и отрицательной плавучестью и движители расположены вдоль по обеим сторонам (по бортам) корпуса аппарата (а не на его концах, как в прототипе) и установлены попарно на противоположных (т. е. расположенных с противоположных сторон от корпуса аппарата) плечах-поперечинах, которые соединены с подвижными звеньями (или сами являются таковыми) приводных механизмов, осуществляющих их поворот и перемещение относительно корпуса в вертикальной и горизонтальной плоскости и обеспечивающих при этом возвратно-поступательное перемещение стоек-опор, емкостей (камер) плавучести и движителей вдоль боковых сторон (бортов) корпуса, оптимально - по прямолинейным траекториям параллельно его продольной оси.
Причем по длине корпуса аппарата может быть размещено не менее двух противоположных пар плеч-поперечин с установленными на них стойками-опорами, емкостями (камерами) плавучести и движителями.
В частности, противоположные плечи-поперечины в каждой паре расположены под углом друг к другу и являются коромыслами прямолинейно направляющего механизма, содержащего установленную поперек корпуса снабженную направляющими траверсу с установленным на этих направляющих шарнирно-ползунным устройством, на котором установлены эти плечи-коромысла. Причем середины этих плеч-коромысел рычагами-шатунами длиной, равной половинам их длины, посредством шарниров и (или) ползунов (в зависимости от взаимосвязи друг с другом противоположных плеч-коромысел) подвижно соединены с концами траверсы.
Так, например, противоположные плечи-коромысла в каждой паре могут быть выполнены разделенными и установлены на разных ползунах и (или) шарнирах.
Или же они могут быть жестко соединены (скреплены) друг с другом и представлять собой единое целое (единое коромысло прямолинейно направляющего механизма).
В случае жестко скрепленных друг с другом плеч-коромысел и при шарнирном соединении их рычагами-шатунами с концами траверсы, траверса выполнена состоящей из двух отдельных подвижных частей. Эти отдельные части траверсы установлены с возможностью возвратно-поступательного перемещения поперек корпуса и снабжены стопорными устройствами, обеспечивающими при поворотах плеч-коромысел в вертикальной плоскости поочередную фиксацию их положения со стороны внедренных в грунт поверхности дна стоек-опор.
Траверсы прямолинейно направляющих механизмов могут быть установлены на корпусе аппарата с помощью поворотных устройств, обеспечивающих возможность их регулируемого поворота относительно корпуса аппарата в вертикальной и в горизонтальной плоскости.
Вертикальные стойки-опоры или только их внедряемые в грунт поверхности дна концевые участки могут быть выполнены криволинейными, например дугообразными, и установлены на плечах-коромыслах с некоторым внешним развалом.
Изобретение поясняется на следующих чертежах.
На фиг. 1 показана общая конструктивная схема описываемого плавуче-шагающего донного аппарата.
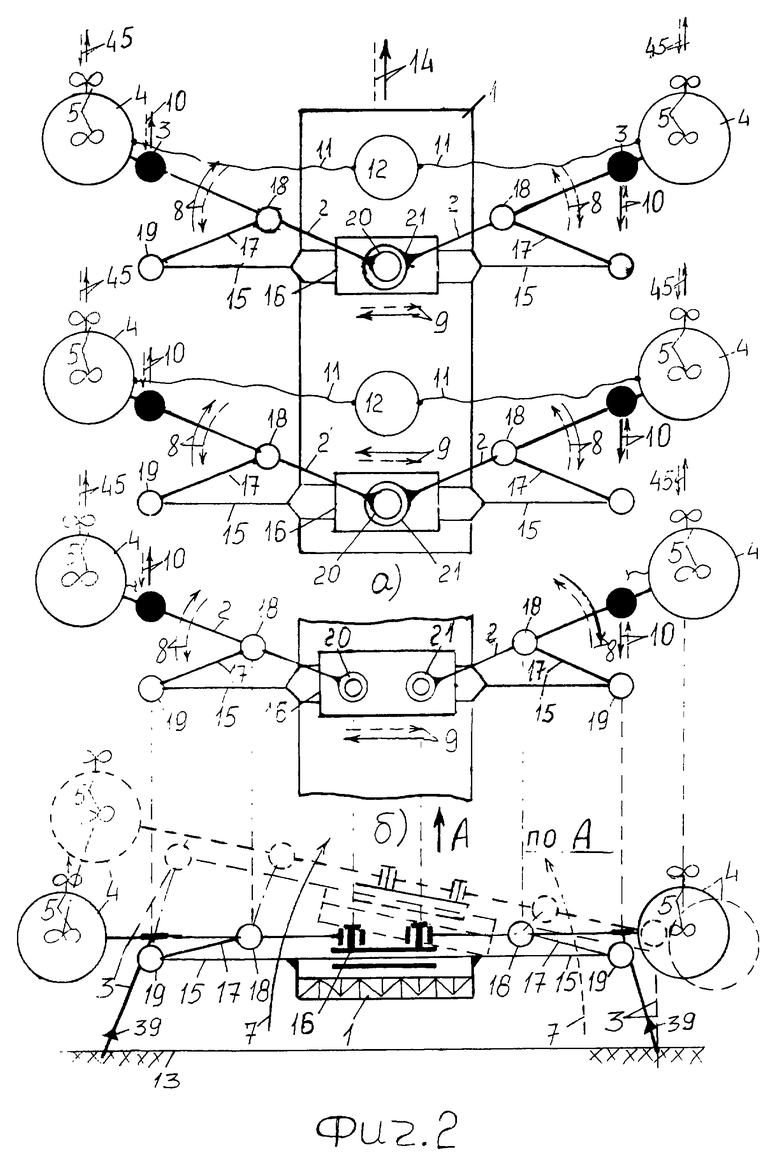
На фиг. 2а, б показана конструкция аппарата с расположенными под углом друг к другу разделенными плечами-коромыслами прямолинейно направляющего механизма.
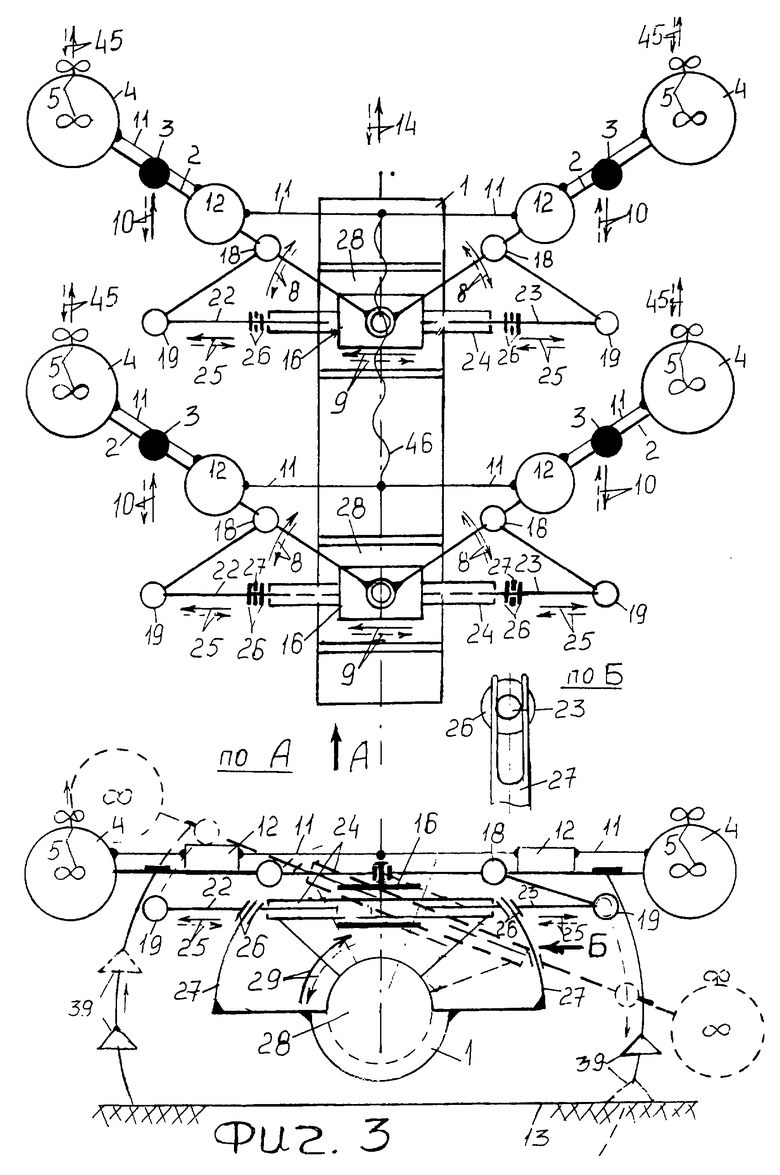
На фиг.3 показана конструкция аппарата с расположенными под углом друг к другу жестко скрепленными друг с другом противоположными плечами-коромыслами прямолинейно направляющего механизма.
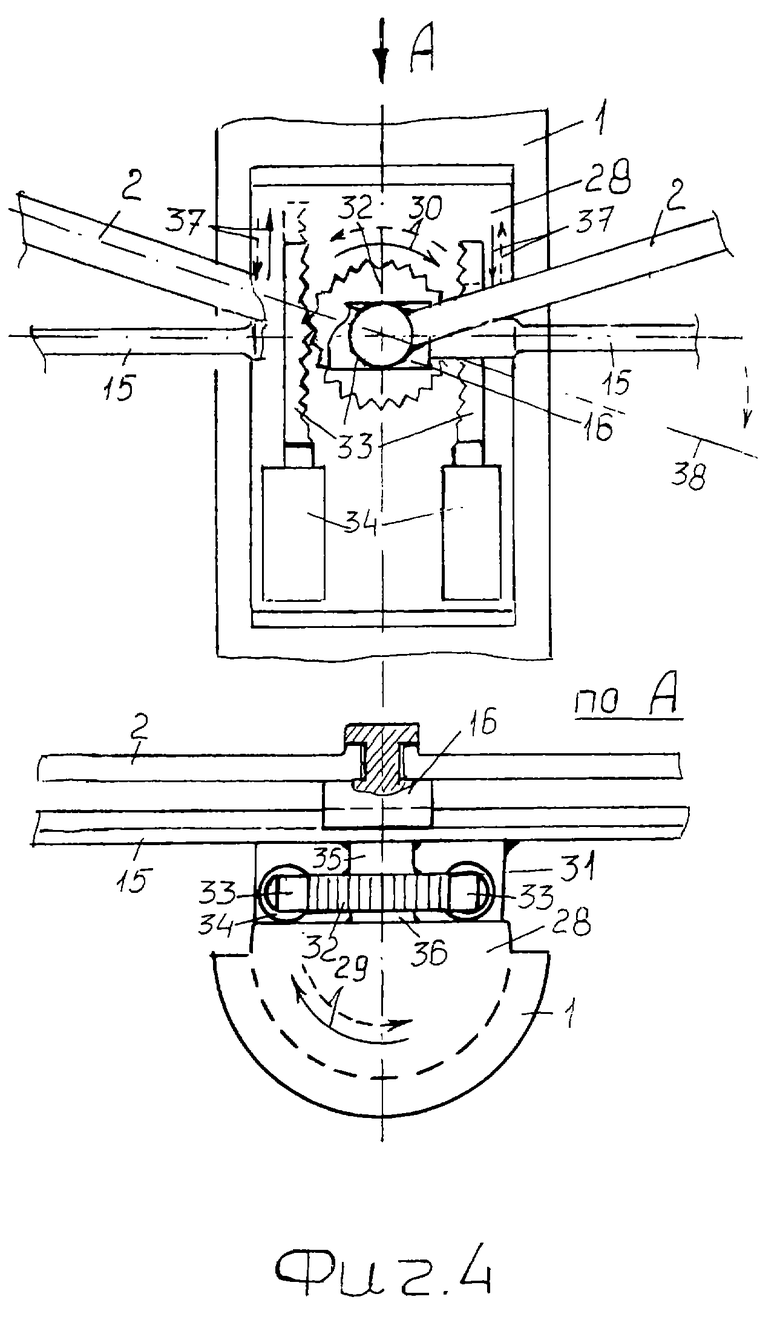
На фиг. 4 показана конструкция узла поворота относительно корпуса аппарата траверсы прямолинейно направляющего механизма.
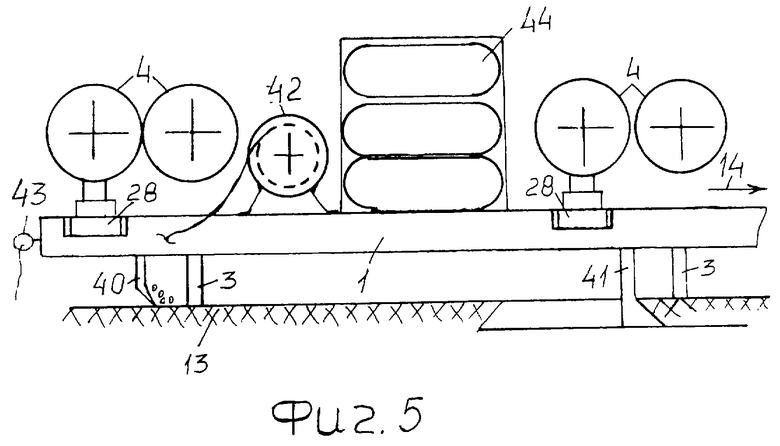
На фиг.5 показаны примеры установки на корпусе аппарата различных рабочих органов.
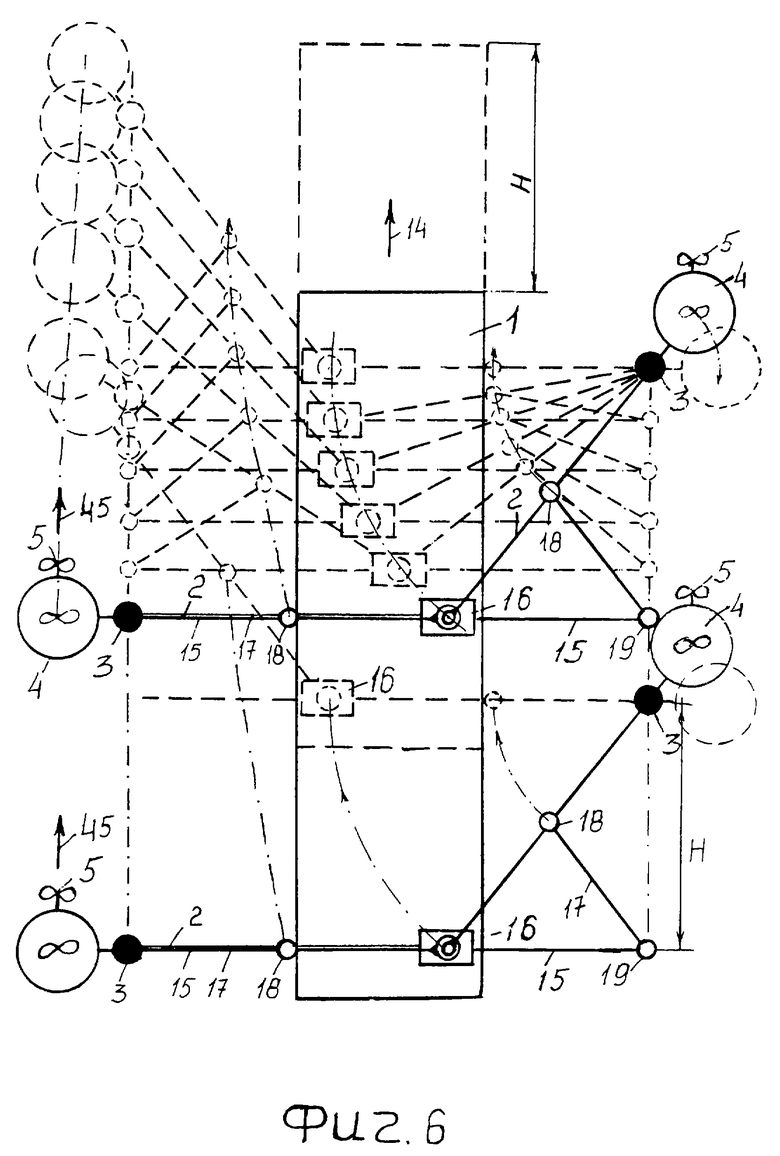
На фиг.6 показана кинематическая схема передвижения (шагания) аппарата с разделенными плечами-коромыслами прямолинейно направляющего механизма.
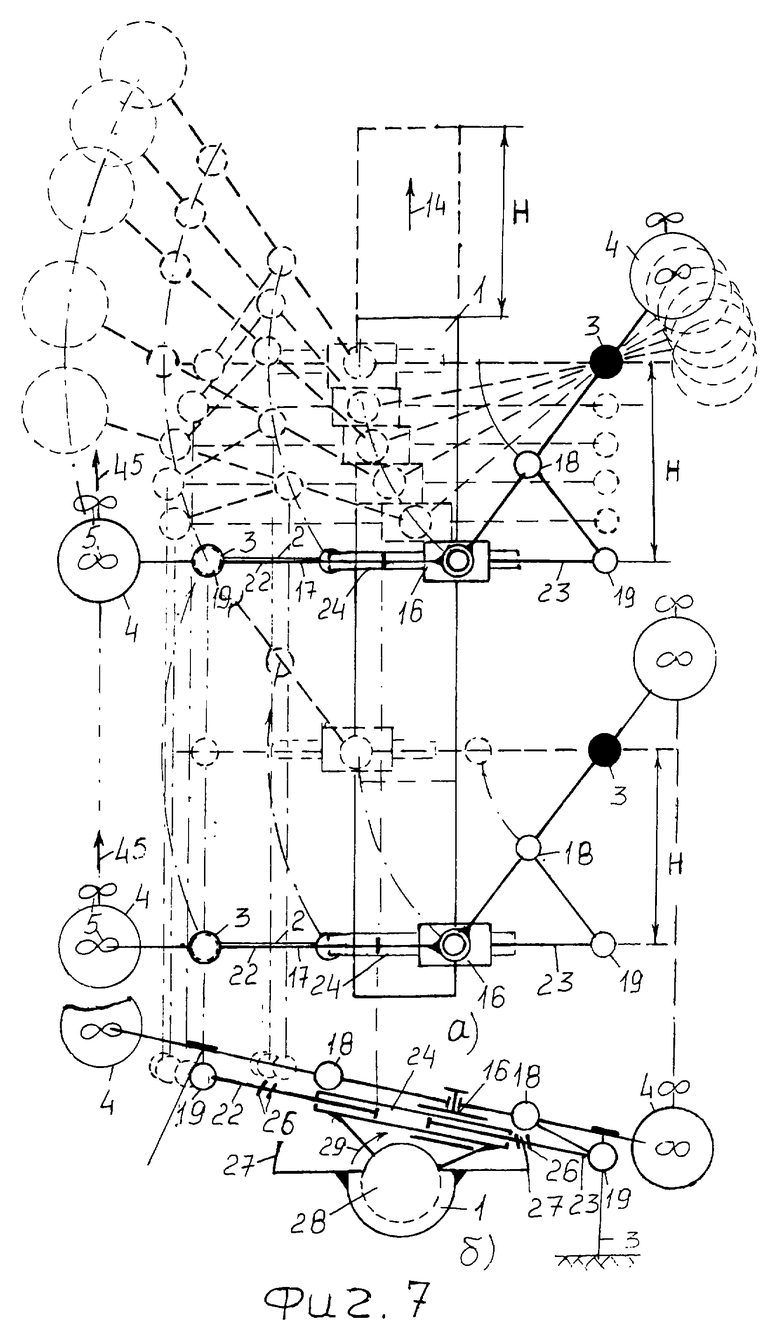
На фиг.7 показана кинематическая схема перемещения (шагания) аппарата с жестко скрепленными друг с другом плечами-коромыслами прямолинейно направляющего механизма.
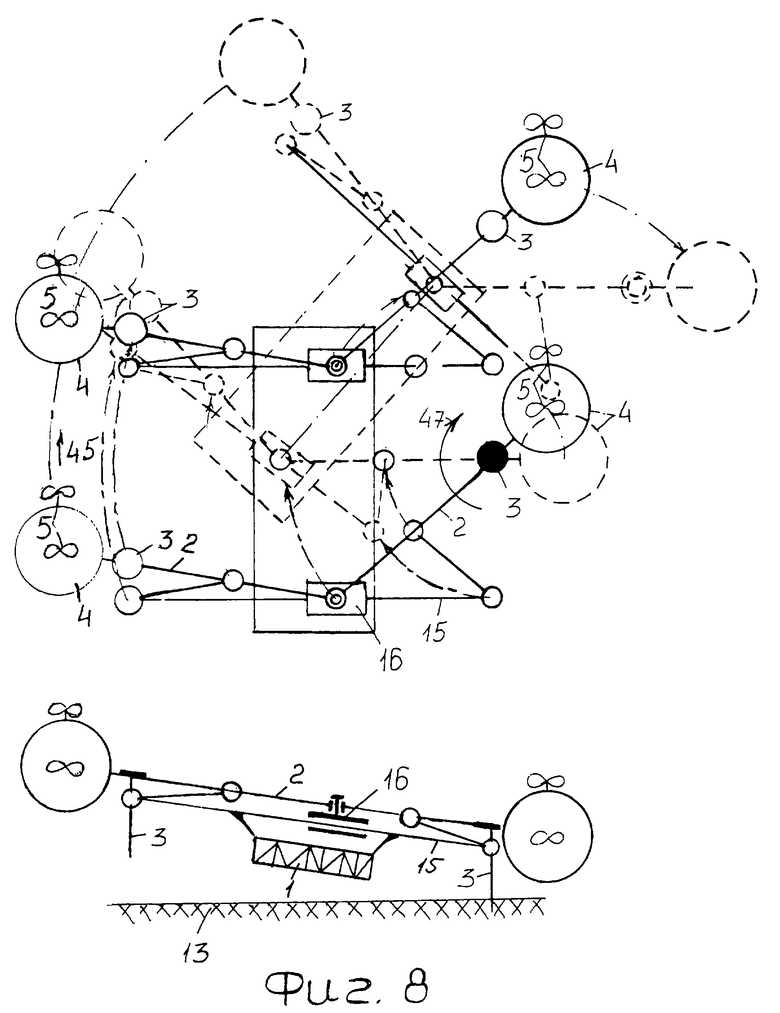
На фиг. 8 показана схема поворота аппарата при шагании по поверхности дна.
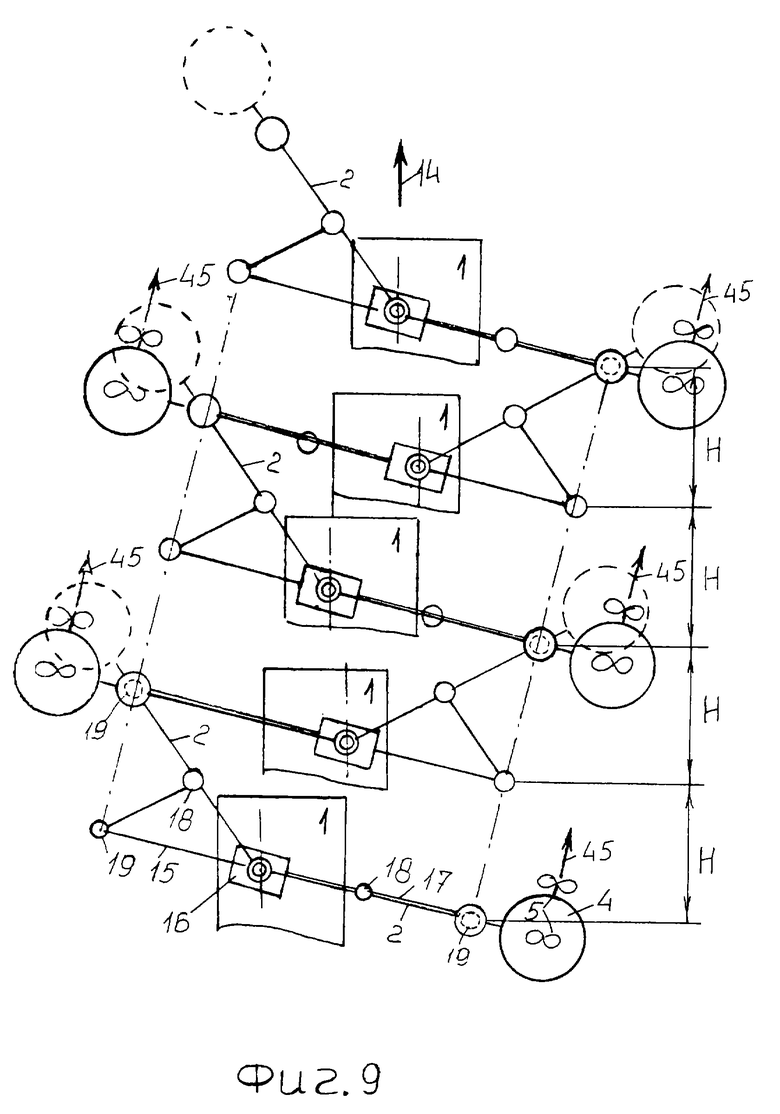
На фиг. 9 показана схема поступательного плоскопараллельного перемещения аппарата при шагании по поверхности дна.
Описываемый плавуче-шагающий донный аппарат содержит горизонтально расположенный корпус 1 и установленные вдоль корпуса по обеим его боковым сторонам (по бортам) попарно на противоположных плечах-поперечинах 2 вертикальные стойки-опоры 3 (на чертеже условно закрашены), герметичные емкости (камеры) плавучести 4 с регулируемой попеременно изменяемой положительной и отрицательной плавучестью, а также горизонтальные и вертикальные, например винтовые, тяговые движители 5 (фиг.1).
Причем по длине корпуса аппарата может быть размещено не менее двух (на фиг.1 показано три) пар противоположно расположенных плеч-поперечин с установленными на них стойками-опорами, емкостями (камерами) плавучести и движителями.
Плечи-поперечины 2 соединены с подвижными звеньями (или сами являются таковыми) приводных механизмов (на фиг.1 показаны в общем виде позицией 6), осуществляющих поворот и перемещение этих плеч-поперечин 2 относительно корпуса 1 в вертикальной (стрелки 7 на виде по А) и в горизонтальной (стрелки 8 и 9) плоскостях и обеспечивающих при этом возвратно-поступательное перемещение вертикальных стоек-опор 3, емкостей (камер) плавучести 4 и движителей 5 вдоль боковых сторон (бортов) корпуса 1, оптимально - по прямолинейной траектории, параллельно продольной оси корпуса 1 (показано стрелками 10).
При этом корпус 1, связывающий воедино всю совокупность установленных на нем плеч-поперечин 2, сам является звеном такого единого прямолинейно направляющего механизма.
Собственно приводами (движителями) при этом служат сами емкости (камеры) плавучести 4 с регулируемой попеременно изменяемой плавучестью, а также вертикальные и горизонтальные тяговые движители 5.
Емкости (камеры) плавучести 4 заполнены балластной жидкостью и соединены гибкими (или шарнирно сочлененными) трубопроводами 11 между собой и с насосами 12, перекачивающими эту балластную жидкость поочередно из одних емкостей 4 в другие. Благодаря этому одни емкости 4 могут получать положительную плавучесть и всплывать, а другие, расположенные на противоположных плечах-поперечинах 2 с другой стороны корпуса, - отрицательную плавучесть и погружаться, производя при этом поворот (по стрелкам 7) плеч-поперечин 2 вместе с установленными на них стойками-опорами 3 в вертикальной плоскости (на фиг.1, виде по А положение аппарата после такого поворота показано пунктиром).
В осуществлении поворота плеч-поперечин 2 при этом могут участвовать и вертикальные тяговые движители 5.
Поворот плеч-поперечин 2 относительно корпуса 1 в горизонтальной плоскости (по стрелкам 8) осуществляется установленными на них горизонтальными тяговыми движителями 5.
Таким образом при поочередном (то с одной стороны (борта) корпуса 1, то с другой его стороны) опускании (стрелки 7) и внедрении стоек-опор 3 в грунт поверхности дна 13 и последующих поворотах (по стрелкам 8) плеч-поперечин 2 с их соответствующим перемещением относительно корпуса 1 (по стрелкам 9) (в том числе за счет удлинения и укорочения в случае их выдвижной, например телескопической конструкции) происходит поступательное (прямолинейно-поступательное) перемещение корпуса 1 аппарата относительно внедренных в грунт бортовых стоек-опор 3 (по стрелкам 10), то есть - поступательное перемещение аппарата по поверхности дна.
14 - направление поступательного перемещения (шагания) аппарата.
При этом рабочий упор создается всеми имеющимися (не менее двух) внедренными в грунт поверхности дна 13 бортовыми (расположенными по одному борту) стойками-опорами 3 (а не одной концевой, как в прототипе).
Герметичные, цилиндрические, шарообразные или какой другой формы емкости (камеры) плавучести 4 установлены или непосредственно над стойками-опорами 3, или, как показано на чертежах, на некотором продолжении плеч-поперечин 2.
Горизонтальные и вертикальные, например, винтовые тяговые движители 5 могут быть установлены (как показано на чертеже) непосредственно на (в) емкостях (камерах) плавучести 4.
Перекачивающие балластную жидкость насосы 12 могут быть установлены как на корпусе 1 аппарата (как показано на фиг.1 и 2), так и на плечах-поперечинах 2 (как показано на фиг.3) и соединены гибкими или подвижно соединенными (сочлененными) трубопроводами (на чертежах условно показаны волнистыми линиями) с емкостями (камерами) плавучести 4.
Корпус 1 аппарата может быть выполнен в виде жесткой фермы, рамы, трубчатой балки и т.д. с любой формой поперечного сечения, а также - в виде герметичной водоизмещающей трубообразной емкости с регулируемо изменяемой положительной и отрицательной плавучестью. Например, он может представлять собой прочный корпус обитаемого подводного, в том числе автономного плавсредства (например, подводной лодки).
Плечи-поперечины 2 (на чертежах условно показаны линиями) имеют форменную или балочную конструкцию с соответствующими известным образом выполненными участками для образования подвижных соединений (кинематических пар) с другими элементами (звеньями) приводного механизма.
Приводные механизмы 6, обеспечивающие возвратно-поступательное перемещение стоек-опор 3, емкостей (камер) плавучести 4 и движителей 5 вдоль боковых сторон (бортов) корпуса 1 аппарата, могут иметь различную конструкцию.
В описываемых частных технических решениях (см. фиг.2 и 3) с целью обеспечения прямолинейного вдоль боковых сторон (бортов) корпуса 1 параллельно его продольной оси возвратно-поступательного перемещения стоек-опор 3 (по стрелкам 10) и соответственно прямолинейного поступательного передвижения (шагания) аппарата (по стрелкам 14) приводные механизмы 6 выполнены в виде шарнирно-рычажных прямолинейно направляющих механизмов.
Каждый такой механизм содержит расположенную поперек корпуса 1 снабженную направляющими траверсу 15, установленное на этих направляющих шарнирно-ползунное устройство 16, на котором установлена пара противоположных плеч-поперечин 2 с возможностью их поворота (по стрелкам 8) и перемещения (по стрелкам 9) относительно корпуса 1 в горизонтальной плоскости, а также рычаги-шатуны 17. Причем противоположные плечи-поперечины 2 расположены под углом друг к другу и являются коромыслами прямолинейно направляющего механизма, и их середины рычагами-шатунами 17 длиной, равной половинам длин плеч-коромысел, подвижно соединены с концами направляющей траверсы 15. В частности, как показано на примерах фиг.2 и 3, они могут быть соединены с помощью шарниров 18 и 19.
(Здесь и в дальнейшем на чертежах подобного типа шарниры для простоты показаны малыми окружностями). Шарнирно-ползунное устройство установлено на направляющих траверсы 15 и представляет собой мощный силовой узел (известной конструкции), способный удерживать плечи-коромысла 2 с установленными на них стойками-опорами 3 в рабочем положении и передавать тяговые усилия от движителей (камер плавучести 4 и винтов 5) к корпусу 1, несущему полезную нагрузку.
Противоположные плечи-коромысла 2 в каждом таком прямолинейно направляющем механизме могут быть выполнены или в виде отдельных (разделенных между собой) его звеньев и установлены на разных ползунах и (или) шарнирах с образованием соответствующих кинематических пар, или же быть жестко соединены (скреплены) друг с другом и представлять собой единое углообразное плечо-коромысло.
В зависимости от этого возможны различные конструкции звеньев и кинематических пар прямолинейно направляющего механизма, в том числе подвижного соединения рычагами-шатунами 17 середин плеч-коромысел 2 с концами траверсы 15 (см. фиг.2 и 3).
Например, разделенные между собой плечи-коромысла 2 могут быть установлены или на отдельных концентрично расположенных внутреннем и внешнем шарнирах 20 и 21 (как показано на фиг.2а), или же (как показано на фиг.2б) - на отдельных разнесенных шарнирах 20 и 21 шарнирно-ползунного устройства 16.
При такой конструкции при поворотах в горизонтальной плоскости (по стрелкам 8) угол α между противоположными плечами-коромыслами в соответствии с кинематикой движения изменяется в пределах от своего конструктивно заданного максимального значения до 60o (на оси симметрии).
При жестко скрепленных между собой противоположных плечах-коромыслах 2 и при шарнирном (с помощью шарниров 18, 19) соединении рычагов-шатунов с концами траверсы и серединами плеч-коромысел 2 для обеспечения кинематики движения направляющая траверса 15 может быть выполнена состоящей из двух отдельных подвижных участков 22 и 23 (см. фиг.3). Эти отдельные участки траверсы заключены в общий установленный поперек корпуса 1 и снабженный направляющими для установки шарнирно-ползунного устройства 16 цилиндр 24. В процессе поворота плеч-коромысел 2 в горизонтальной плоскости (по стрелкам 8) участки 22, 23 могут осуществлять поочередно и независимо друг от друга возвратно-поступательное поперек корпуса 1 (по стрелкам 25) перемещение.
При этом в конструкции предусмотрены стопорные устройства, обеспечивающие поочередную (со стороны внедряемых в грунт поверхности дна стоек-опор 3) фиксацию положения участков 22 и 23 траверсы и одновременно их поочередное освобождение от фиксации со стороны поднятых стоек-опор 2.
В качестве таких стопорных устройств, например, как показано на фиг.3 (видах по А и Б), могут быть использованы выполненные на этих участках траверсы бурты-фиксаторы 26 и жестко прикрепленные к корпусу вилкообразные элементы 27, входящие в пазы между буртами-фиксаторами 26 при внедрении стоек-опор 3 в грунт поверхности дна и выходящие из этих пазов при поворотах плеч-коромысел 2 в вертикальной (по стрелкам 7) плоскости вокруг корпуса и выдергивании стоек-опор 3 из грунта.
При выходе стопорных элементов 27 из пазов фиксаторов 26 перемещение свободных (не внедренных в грунт) бортовых стоек-опор 3 может происходить по любой криволинейной траектории в соответствии с кинематикой движения, в частности (как будет показано на фиг.7) по дуге окружности.
При такой конструкции установленные по длине корпуса 1 прямолинейно направляющие механизмы соединены с корпусом аппарата через посредство цилиндров 24, которые или снабжены направляющими, или сами являются направляющими, на которых установлены шарнирно-ползунные устройства 16.
Конструктивно приемлемые значения задаваемого постоянного угла α между противоположными жестко скрепленными плечами-коромыслами (т.е. в едином углообразном коромысле) прямолинейно направляющего механизма находятся в пределах 90o<α<180o.
В обоих вышеописанных технических решениях обеспечивается строго прямолинейное и параллельное продольной оси корпуса 1 возвратно-поступательное перемещение (по стрелкам 10) внедряемых в грунт поверхности дна 13 стоек-опор 3 и соответственно прямолинейное поступательное передвижение относительно внедренных в грунт поверхности дна стоек-опор 2 корпуса 1 аппарата.
Преимуществом первого частного технического решения по сравнению со вторым является его более простая конструкция, а преимуществом второго является то, что жесткое углообразное коромысло 2 в каждом прямолинейно направляющем механизме работает как единый рычаг с точкой опоры на внедренной в грунт стойке-опоре 3, что позволяет примерно вдвое снизить тяговые усилия (при одинаковой полезной нагрузке и прочих равных условиях) как винтовых движителей 5, так и камер плавучести 4 (как движителей), осуществляющих поворот плеч-коромысел 2 в вертикальной плоскости за счет подвсплывания и погружения.
Возможны и другие варианты конструкции звеньев и кинематических пар прямолинейно направляющих механизмов 6 и их конструктивно-функциональной взаимосвязи с корпусом 1, которые вписываются в общую конструктивную схему, показанную на фиг.1.
С целью свести к минимуму подвсплытие корпуса 1 аппарата при поворотах плеч-коромысел 2 в вертикальной плоскости (по стрелкам 7), а также, чтобы поворот отдельных установленных по длине корпуса 1 пар плеч-коромысел 2 мог осуществляться независимо друг от друга и на различные (в том числе заданные) углы в зависимости от рельефа поверхности дна, каждая траверса 15 установлена на корпусе 1 подвижно, с возможностью поворота вокруг корпуса 1, например с помощью шарнирного устройства 28 (см. фиг.3).
В этом случае поворот плеч-коромысел 2 в вертикальной плоскости осуществляется не вместе с корпусом 1 относительно стоящей на поверхности стойки-опоры 3 (по стрелкам 7, как показано на фиг.2, виде по А), а вместе с траверсой 15 относительно корпуса 1. В частности, на шарнире 28 вокруг его продольной оси по стрелкам 29 (см. фиг.3). Это исключает при поворотах плеч-коромысел 2 подвсплытие корпуса аппарата, за счет чего устраняются связанные с этим дополнительные непроизводительные энергозатраты и соответственно снижается энергоемкость аппарата.
С целью обеспечения поступательного плоскопараллельного перемещения аппарата за счет возможности поворота траверсы 15 относительно корпуса 1 в горизонтальной плоскости траверса 15 установлена на корпусе 1 с помощью горизонтального поворотного устройства.
На фиг. 4 в качестве примера показана возможная конструкция поворотного устройства 31, осуществляющего поворот траверсы 15 относительно корпуса 1 одновременно в вертикальной (по стрелкам 29) плоскости на шарнире 28 и в горизонтальной (по стрелкам 30) плоскости.
Поворотное устройство 31 для каждой траверсы 15 прямолинейно направляющего механизма включает размещенные на шарнире 28 зубчатое колесо 32 и установленные по его диаметру в зубчатом зацеплении с ним зубчатые рейки 33, являющиеся штоками управляющих поворотом гидроцилиндров 34.
Зубчатое колесо жестко (например, фланцем 35) соединено с траверсой 15 и установлено подвижно на вертикальном пальце 36 с возможностью поворота вместе с траверсой 15 относительно корпуса 1 по стрелкам 30 при разнонаправленном (направленном в прямо противоположные стороны) перемещении (по стрелкам 37) установленных по диаметру колеса 32 зубчатых реек-штоков 33.
Позицией 38 условно показано возможное положение оси траверсы 15 при ее повороте в результате выдвигания, например, левой зубчатой рейки-штока 33 и втягивания в гидроцилиндр правой зубчатой рейки-штока 33.
Возможны и другие конструкции поворотного узла 31.
С целью минимизации усилий внедрения стоек-опор 3 в грунт и их выдергивания из грунта, а также исключения возникающих при этом поперечных сил стойки-опоры 3 или только их внедряемые в грунт поверхности дна концевые участки выполнены не прямыми, а дугообразными (см. фиг.3).
При этом в случае неподвижного соединения направляющей траверсы 15 с корпусом 1 аппарата радиус кривизны дугообразных стоек-опор 3 примерно равен расстоянию от камеры плавучести 4 до стойки-опоры 3, расположенной на противоположном плече-коромысле 2 (см. фиг.2, вид по А). При установке траверсы 15 на корпусе 1 на шарнирном соединении 28 радиус кривизны составляет примерно половину длины траверсы 15 (см. фиг.3, вид по А).
С этой же целью (за счет внедрения стоек-опор в грунт поверхности дна 13 под нормальным углом) стойки-опоры 3 могут быть установлены на плечах ферм-коромысел 2 с некоторым внешним развалом (см. фиг.2, вид по А).
39 - выполненные на стойках-опорах 3 ограничительные элементы, препятствующие недопустимому проваливанию стоек-опор в слабый грунт поверхности дна.
Вышеописанная конструкция плавуче-шагающего донного аппарата позволяет эффективно осуществлять его многофункциональное использование (применение) за счет возможности установки на его корпусе 1 одновременно самых различных рабочих (технологических) органов (устройств) и выполнять полезную работу в непрерывном (в проессе шагания аппарата) и безотрывном от поверхности дна 13 режимах (см. фиг.5).
Так, при добыче на поверхности дна моря твердых полезных ископаемых (например железомарганцевых конкреций (ЖМК) на корпусе аппарата могут быть установлены разного рода рыхлительно-сгребающие устройства (условно 40); при рытье траншеи - траншеекопатель (условно 41); при укладке кабеля на корпусе 1 может быть установлена катушка с электрокабелем (условно 42), а при перемещении по поверхности дна тяжестей (например, при прокладывании труб) концевая часть корпуса оснащена тяговыми приспособлениями (например, крюком 43).
44 - дополнительная система емкостей плавучести с регулируемой плавучестью, обеспечивающая самостоятельное погружение-всплытие аппарата.
С поверхностным судном (плавсредством) базирования описываемый аппарат (если он не является автономным) связан шланго- и электрокабелем для питания движителей и перекачивающих насосов и других агрегатов, управляющими и различными технологическими связями (для наблюдения и управления работой аппарата и его агрегатов). (На чертеже условно не показано).
Погружение на дно и подъем аппарата на поверхность может осуществляться с помощью известных технических средств или автономно за счет заполнения забортной водой емкостей (камер) плавучести 4, водоизмещающего корпуса 1, дополнительных емкостей типа 44 и их опорожнения (продувки).
Механизм передвижения (шагания) описываемого плавуче-шагающего донного аппарата по поверхности дна осуществляется следующим образом.
В исходном статическом положении (см. фиг.2, 3) корпус 1 аппарата опирается на поверхность дна 13 всеми имеющимися с обеих боковых сторон (бортов) корпуса 1 вертикальными стойками-опорами 3; камеры плавучести 4 левых и правых плеч передней (носовой) и задней (кормовой) плеч-коромысел 2 при этом уравновешены балластной жидкостью.
Движение (шагание) аппарата по поверхности дна из указанного исходного положения в направлении по стрелке 14 начинается с того, что одним, например левым бортовым камерам 4 (за счет их опорожнения), придают положительную плавучесть, а правым (за счет их заполнения балластной жидкостью) - отрицательную. Это осуществляется за счет перекачивания по трубопроводам 11 (с помощью насосов 12) балластной жидкости из камер 4, расположенных на левых бортовых плечах-коромыслах 2, в камеры 4, расположенные на правых бортовых плечах-коромыслах 2.
В результате этого левые плечи-коромысла 2 подвсплывают, поворачиваясь в вертикальной плоскости относительно корпуса 1, выдергивая при этом из грунта установленные на них вертикальные стойки-опоры 3 и приподнимая их над поверхностью дна, а правые, наоборот, погружаются, опуская установленные на них стойки-опоры 3 и внедряя их в грунт поверхности дна 13 (см. фиг.2 и 3, вид по А, где такое положение аппарата показано пунктирными линиями; штрихпунктирными линиями показаны траектории перемещения отдельных его частей).
При этом если траверсы 15 соединены с корпусом 1 аппарата жестко, то при подвсплытии плеч-коромысел 2 корпус 1 поворачивается вместе с ними на соответствующий угол по стрелке 7 (см. фиг.2, вид по А).
Если же траверсы 15 установлены на корпусе 1 с помощью шарнирных соединений 28 (как показано на фиг.3), то при повороте плеч-коромысел 2 по стрелкам 29 (фиг.3, вид по А) корпус 1 аппарата остается практически неподвижным.
(Незначительное подвсплытие и погружение корпуса 1 может происходить только из-за действия реактивных сил при силовом внедрении стоек-опор 3 в грунт поверхности дна).
В повороте поперечных ферм 2 при этом могут участвовать и имеющиеся вертикальные движители 5, создавая необходимые дополнительные тяговые усилия, необходимые для внедрения стоек-опор 3 в плотный грунт и выдергивания из грунта поверхности дна 13.
После этого включаются в работу установленные на поднятых левых плечах-коромыслах 2 горизонтальные тяговые движители 5. За счет создаваемой ими тяги, направленной вдоль корпуса 1 (стрелки 45), плечи-коромысла 2 поворачиваются на своих заглубленных в грунт вертикальных стойках-опорах 3, расположенных в данном примере с правого борта корпуса 1 (на фиг.2, 3 условно закрашены).
В результате корпус 1 аппарата получает прямолинейное поступательное (по стрелке 14) перемещение на один шаг.
Максимальная длина шага "Н" определяется длиной плеча фермы-коромысла 2 и величиной угла его полного поворота.
После этого путем перекачивания балластной жидкости из правых камер 4 в левые и за счет получения первыми положительной, а вторыми отрицательной плавучести плечи-коромысла 2 вместе с установленными на них стойками-опорами 3 поворачиваются в вертикальной плоскости в обратную сторону. При этом правые стойки-опоры 3 выдергиваются из грунта и приподнимаются над поверхностью дна, а левые, наоборот, опускаются и внедряются в грунт.
Затем за счет создания установленными на правых плечах-коромыслах 2 горизонтальными движителями 5 направленной вдоль корпуса 1 силы тяги (стрелки 45) плечи-коромысла 2 поворачиваются в горизонтальной плоскости на шарнире (шарнирах) шарнирно-ползунного устройства 16 вокруг внедренных в грунт левых стоек-опор 3. В результате корпус 1 аппарата поступательно перемещается (по стрелке 14) еще на один шаг. И так далее.
На фиг.6 и 7 показаны кинематические схемы перемещения плеч-коромысел 2 со стойками-опорами 3, других звеньев, а также камер плавучести 4 при передвижении аппарата по поверхности дна моря. Сплошными линиями показаны их исходные положения (предельно возможные, когда левые плечи-коромысла 2 и рычаги 17 повернуты до совмещения с направляющей траверсой 15, а плечи-коромысла 2 - на максимально возможный угол шагания), а пунктирными линиями - промежуточные и конечные их положения в процессе перемещения корпуса 1 аппарата на предельно возможную ширину шага Н.
Траектории перемещения при этом отдельных звеньев прямолинейно направляющих механизмов, а также поднятых стоек-опор 3 и камер плавучести 4 на фиг.6 и 7 показаны штрихпунктирными линиями.
При раздельных плечах-коромыслах 3 (см. фиг.2 и фиг.6) траектории перемещения стоек-опор 3 с обеих сторон (бортов) корпуса 1 при поворотах плеч-коромысел 2 в горизонтальной плоскости (по стрелкам 8) (в силу равенства длины рычагов 17, 18 половинам длины плеч-коромысел) имеют строго прямолинейный и параллельный продольной оси корпуса 1 характер. Очевидно, что камеры плавучести 4 (из-за их установки на некотором расстоянии от стоек-опор 3) перемещаются вдоль бортов корпуса 1 по траекториям, отличным от прямолинейности.
При этом угол α между противоположными подвижными плечами-коромыслами 2 в процессе их поворота изменяется от конструктивно заданного максимального значения до своего минимального значения равного 60o на оси симметрии.
Кинематическая схема перемещения звеньев прямолинейно направляющего механизма в конструктивном исполнении, показанном на фиг.3, представлена на фиг.7.
В этом случае жестко скрепленные между собой плечи-коромысла 2 представляют собой единое углообразное коромысло-рычаг с неизменным (конструктивно заданным тупым углом 90o<α<180o между плечами) и с точкой опоры в месте внедрения в грунт стоек-опор 3. При этом для обеспечения кинематики движения механизма необходимо всякий раз фиксировать (например, как показано на фиг. 36, с помощью вилкообразного стопорного устройства 27) неподвижное положение подвижного участка 23 траверсы, расположенного со стороны внедренных (правых) стоек-опор 3 (закрашены). Траектории движения при этом поднятых (левых) бортовых стоек-опор 3, как показано на фиг.7, имеют дугообразный вид. Причем левый участок 23 траверсы в процессе поворота плеч-коромысел 2 выдвигается из цилиндра 24 и его конец описывает некую криволинейную траекторию.
Для иллюстрации на фиг.7 на проекциях а) и б) вертикальными штрихпунктирными линиями показана взаимосвязь положений поднятых левых бортовых стоек-опор 2 и концов левого участка 23 траверсы при перемещении корпуса 1 аппарата на один шаг "Н".
В обоих вышеописанных случаях прямолинейность возвратно-поступательного перемещения вертикальных стоек-опор 3 вдоль боковых сторон (бортов) корпуса 1 с траекторией, параллельной его продольной оси, обеспечивает прямолинейность поступательного перемещения корпуса 1 при шагании аппарата (когда стойки опоры 3 внедрены в грунт, а корпус 1 аппарата перемещается относительно этих стоек-опор).
Очевидно, при перемещении плеч-коромысел 2 в горизонтальной плоскости в обратную сторону корпус аппарата точно таким же образом может передвигаться (шагать) в противоположную сторону.
Таким образом, аппарат имеет и прямой, и обратный (задний) ход (на чертежах показано сплошной и пунктирной стрелкой 14).
Изменение направления движения аппарата может производиться путем подвсплытия носового конца корпуса 1 до состояния отрыва носовых стоек-опор 3 от поверхности дна и последующего поворота корпуса аппарата с помощью горизонтальных движителей 5 вокруг одной внедренной в грунт кормовой стоки-опоры 3 (по аналогии с вышеописанным прототипом).
Это может осуществляться за счет продувки всех носовых емкостей 4 и перекачки балластной жидкости по дополнительному (гибкому или с шарнирно соединенными участками) трубопроводу 46 (на фиг.3 показан волнистой линией) в кормовую емкость (камер) плавучести 4, установленную на одном плече-коромысле 2 с внедренной в грунт стойкой-опорой 3 (см. фиг.8).
На фиг.8 поворот корпуса 1 аппарата, например вправо, осуществляется по стрелке 47 вокруг внедренной в грунт поверхности дна задней правой кормовой стойки-опоры 3 (на чертеже условно закрашена) при поднятых над проверхностью дна всех других стоек-опор 3. Исходное положение корпуса 1 показано сплошными линиями, его положение после поворота показано пунктирными линиями. Штрихпунктирными линиями показаны траектории перемещения отдельных элементов и звеньев аппарата при его повороте.
Для осуществления поворота по аналогии с вышеописанным прототипом возможна также установка по концам корпуса 1 дополнительных выдвижных поворотных стоек-опор. (На фиг. 1 условно показано пунктирными окружностями на концах корпуса 1).
Режим поступательного плоскопараллельного перемещения (шагания) аппарата осуществляется за счет регулируемого поворота траверсы 15 относительно корпуса 1 в горизонтальной плоскости, в частности с помощью устройства, показанного на фиг.4.
На фиг. 9 на примере пяти шагов Н показано последовательное (на каждом шаге) положение корпуса 1 аппарата при его поступательном (по стрелке 14) и одновременно плоскопараллельном перемещении (когда корпус 1 смещается вправо, оставаясь параллельным самому себе), за счет поворота вправо (как показано позицией 38 на фиг.4) траверсы 15.
На фиг.9 сплошными линиями выделены камеры плавучести 4 с установленными на них активными (осуществляющими на каждом шаге тяговое усилие по стрелкам 45) винтовыми движителями 5, в то время как все другие остаются пассивными (не включенными в работу). При этом поворот осуществляется относительно стоек-опор 3, расположенных со стороны камер плавучести 4 с пассивными винтами 5 (показано пунктирными линиями).
Такой режим плоскопараллельного шагания может оказаться технологически выгодным (экономичным), например, при обработке поверхности дна моря и добыче полезных ископаемых (ЖМК).
Полезный технико-экономический эффект достигается за счет следующих существенных отличий описываемого изобретения.
Установкой стоек-опор вдоль по обеим боковым сторонам корпуса аппарата и с возможностью совершать прямолинейное возвратно-поступательное перемещение вдоль корпуса, оптимально - параллельно его продольной оси достигается возможность осуществлять прямолинейное поступательное движение (шагание) аппарата. Это позволяет производить работы, требующие прямолинейного движения и перемещения рабочих органов, а также выполнения полезной работы непрерывно в процессе передвижения аппарата по поверхности дна.
Возможность использования одновременно нескольких (двух и более) внедренных в грунт поверхности дна стоек-опор, установленных по длине корпуса (двух и более) приводных механизмов позволяет многократно увеличить тяговые характеристики аппарата, что особенно важно в условиях слабых грунтов морского дна.
Выполнением противоположных плеч-коромысел, жестко скрепленными между собой в виде единого коромысла-рычага, достигается возможность примерно вдвое (по сравнению с раздельными взаимно подвижными плечами-коромыслами при той же полезной нагрузке и прочих равных условиях) снизить тяговые усилия как винтовых движителей, так и всплывающих и погружающихся камер плавучести 4 при внедрении в грунт и выдергивании стоек-опор из грунта поверхности дна.
Тем самым соответственно снизить энергоемкость и габариты аппарата.
Установка траверсы прямолинейно направляющего механизма на шарнирном соединении с возможностью поворота вокруг корпуса позволяет свести к минимуму подвсплытие аппарата при шагании и тем самым снизить непроизводительные потери энергии и, кроме того, исключить отрыв рабочего органа от поверхности дна и обеспечить условия для его безотрывной работы в процессе шагания аппарата.
А возможность поворота траверсы относительно корпуса в горизонтальной плоскости позволяет осуществлять поступательное плоскопараллельное шагание аппарата, что может повысить эффективность выполнения многих видов работ и технологических операций.
Выполнением стоек-опор (или их внедряемых в грунт концевых участков) не прямыми, а дугообразными и установкой их на плечах поперечин с внешним развалом достигается снижение поперечных нагрузок как на сами стойки-опоры, так и шарнирно-ползунный узел и конструкцию корпуса, чем повышается прочностная их надежность.
Вышеперечисленные преимущества изобретения в своей совокупности позволяют увеличить функциональные возможности и повысить эффективность работы аппарата, существенно расширить область его применения.
Источники информации
1. Walking machines an Introduction to Legged Rotors, oпубл. в 1985 г. By Kogan page Ltd. 120 Pentuville Road, London 1,9 JN, p.123, by Kogan page Ltd. 120 Pentuville Road. London 1,9 JN, p.123, by Kogan page Ltd. 120 Pentuville Road, London 1.9 J\, p.123, fig.4.17.p.156-157, Fig.66.
2. A.c. 504873, E 21 С 50/00, 1976, доп. А.с. 533732, Е 21 С 50/00, 1976 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВУЧЕ-ШАГАЮЩИЙ АППАРАТ И СПОСОБ ЕГО ПЕРЕДВИЖЕНИЯ | 2008 |
|
RU2385254C1 |
| ШАГАЮЩАЯ МАШИНА И СПОСОБ ЕЕ ШАГАНИЯ | 2009 |
|
RU2403166C1 |
| ШАГАЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2008 |
|
RU2374119C1 |
| ПОДЪЕМНО-ТРАНСПОРТНАЯ МАШИНА | 2009 |
|
RU2418736C2 |
| РЫЧАЖНЫЙ ПРЯМОЛИНЕЙНО НАПРАВЛЯЮЩИЙ МЕХАНИЗМ НОГИ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2402450C2 |
| ПЛАНЕТАРНЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 2000 |
|
RU2172879C1 |
| ДВИГАТЕЛЬ С ВНЕШНИМ ПОДВОДОМ ТЕПЛОТЫ | 1999 |
|
RU2177069C2 |
| Многоопорное шагающее транспортноеСРЕдСТВО | 1979 |
|
SU821282A1 |
| Поворотное устройство шагающей машины | 1979 |
|
SU856890A1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ДВИГАТЕЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2174935C2 |
Изобретение относится к горно-морской технике, касается подводных многофункциональных транспортно-технологических аппаратов. Плавуче-шагающий донный аппарат включает горизонтально расположенный корпус и установленные на его концевых участках стойки-опоры, емкости с регулируемой попеременно изменяемой положительной и отрицательной плавучестью и движители. Стойки-опоры, емкости плавучести и движители расположены вдоль корпуса с обеих его боковых сторон и установлены попарно на противоположных плечах - поперечинах, соединенных с подвижными звеньями приводных механизмов с возможностью поворота и перемещения относительно корпуса в вертикальной и горизонтальной плоскости и возвратно-поступательного перемещения вдоль боковых сторон корпуса. Противоположные плечи-поперечины расположены под углом друг к другу и являются коромыслами прямолинейно направляющего механизма, содержащего установленную поперек корпуса траверсу с шарнирно-ползунным устройством, на котором установлены эти плечи-коромысла, середины которых рычагами-шатунами, равными половинам их длины, подвижно соединены с концами траверсы. Стойки-опоры выполнены дугообразными и установлены на плечах-поперечинах с внешним развалом. Обеспечивается прямолинейность поступательного перемещения корпуса и увеличивается тяговое усилие при снижении энергозатрат. 4 з.п. ф-лы, 9 ил.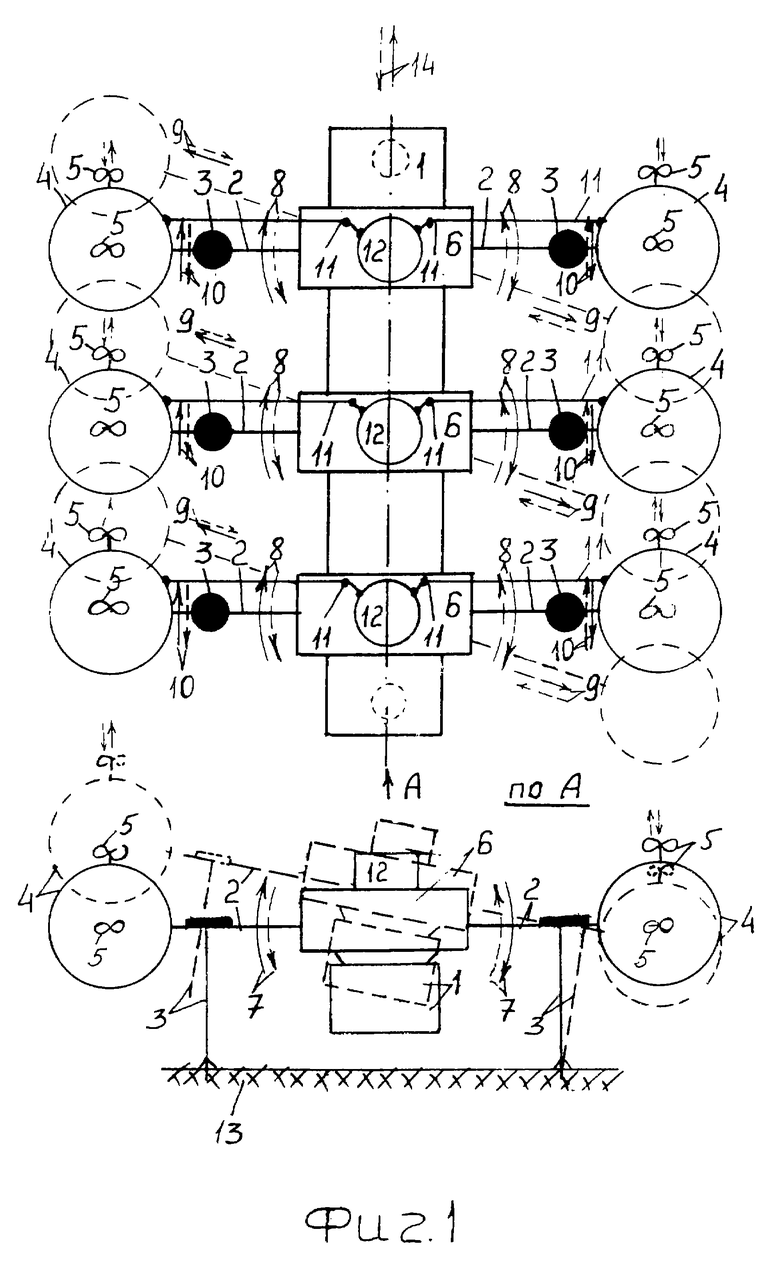
| Устройство для перемещения машин, преимущественно для подводной разработки полезных ископаемых | 1974 |
|
SU533732A2 |
| ШАГАЮЩАЯ УСТАНОВКА ДЛЯ ВЗЯТИЯ ПРОБ СО ДНА МОРЕЙ И ОКЕАНОВ | 1994 |
|
RU2087718C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕРМЕТИЧНОСТИ СИСТЕМЫ ПОДАЧИ РАБОЧЕГО ТЕЛА К ИСТОЧНИКУ ПЛАЗМЫ, ПРЕИМУЩЕСТВЕННО В УСЛОВИЯХ ВАКУУМА | 2008 |
|
RU2377522C1 |
| Конусная дробилка | 2020 |
|
RU2813751C2 |

