Изобретение относится к области подводной техники, касается многофункциональных транспортно-технологических устройств типа амфибий, способных передвигаться шаганием по поверхности дна под водой и вне водной среды, и может найти применение при изучении и промышленном освоении ресурсов Мирового океана.
Наиболее эффективно изобретение может быть использовано при проведении донных работ на континентальном; в особенности, на арктическом шельфе в режиме передвижения: «берег-морское дно-берег»:
- при разработке месторождений полезных ископаемых;
- при проведении инженерно-строительных и иных работ на морском дне;
- при прокладке и обслуживании подводных коммуникаций;
- при проведении аварийно-спасательных операций на дне моря и т.д.;
в качестве (при соответствующем оборудовании):
- донного добычного аппарата;
- подводного крана и бурового устройства, траншеекопателя, трубо- и кабелеукладчика,
- донного бульдозера, тягача-буксира и т.д.
Известен шагающий подводный аппарат, содержащий горизонтальный корпус с установленными по его концам опорными элементами (опорами), герметичными емкостями (камерами) с попеременно изменяемой положительной и отрицательной плавучестью и горизонтальными винтами [1].
Емкости (камеры) (за счет перекачивания балластной жидкости поочередно из одной в другую и, тем самым, изменения их плавучести) служат приводами для поворота концов корпуса с опорами в вертикальной плоскости с подъемом-опусканием опор.
Горизонтальные винты являются приводами для поворота в горизонтальной плоскости подвсплывшего вместе с опорой конца корпуса относительно стоящей на грунте опоры другого его конца. За счет этого осуществляется шагание данного аппарата по поверхности дна.
Его устойчивость в процессе шагания обеспечивается за счет гидроподдержки емкостями (камерами) плавучести.
Его недостатки: - прерывистая синусоидальная походка и малая быстроходность (из-за инерционности, низкого быстродействия приводов - камер переменной плавучести).
Наиболее близким к изобретению является известный плавучее-шагающий донный аппарат, включающий оборудованный средствами переменной положительной и отрицательной плавучести горизонтальный корпус и установленные по его длине прямолинейно направляющие механизмы, содержащие связанные с приводами поворотов относительно корпуса траверсы и установленные на них на шарнирно-ползунных устройствах углообразные коромысла с опорными элементами (опорами) на их противоположных плечах, подвижно соединенных рычагами половинной длины плеча коромысла с траверсами [2].
Средства переменной плавучести в виде герметичных емкостей (камер) установлены побортно (вдоль по обе стороны от бортов корпуса) на противоположных плечах коромысел и в своей совокупности служат средством гидроподдержки аппарата над поверхностью дна.
Одновременно эти камеры являются приводами для вертикального поворота траверс с подъемом-опусканием опор противоположных плеч коромысел, за счет чего производится бортовая сменяемость опор.
Приводами для горизонтального поворота коромысел относительно корпуса, обеспечивающими возвратно-поступательное вдоль корпуса перемещение (шагание) опор, служат установленные побортно на плечах коромысел горизонтальные винты.
Способ передвижениея шаганием аппарата-прототипа, находящегося на плаву над поверхностью дна, осуществляется путем отталкивания от дна поочередно опорами противоположных плеч коромысел прямолинейно направляющих механизмов.
Поскольку устойчивость аппарата при этом обеспечивается за счет гидроподдержки камерами-приводами (и возможными другими средствами плавучести), то ни количество находящихся одновременно в опоре на поверхности дна прямолинейно-направляющих механизмов, ни очередность сменяемости опор не имеют для поддержания устойчивости значения.
Недостатки аппарата-прототипа, которые устраняются описываемым изобретением, следующие.
Невозможность устойчивого непрерывного передвижения шаганием без постоянной гидроподдержки в водной среде и, тем более, вне ее (сухопутного).
Неприменимость для передвижения шаганием вне водной среды приводов (камер переменной плавучести для вертикального поворота траверс и винтовых двигателей для горизонтального поворота коромысел).
Оба этих взаимосвязанных (по отношению к поставленной цели) недостатка напрочь исключают способность прототипа сухопутного передвижения.
Наряду с этим из-за не высокой эффективности действия используемых приводов (инерционность, низкое быстродействие камер переменной плавучести и работающих в реверсивном режиме винтов горизонтального поворота коромысел) аппарат-прототип при передвижении шаганием даже в водной среде не может иметь достаточно высокую быстроходность.
Кроме того, способ передвижения шаганием прототипа не исключает спотыкание опорами при их постановке на грунт и торможение отшагавшими опорами, что существенно снижает качество движения (равномерность, плавность хода).
Вышеперечисленные недостатки прототипа в своей совокупности существенно снижают его общие функциональные возможности и эффективность действия, сужают область его использования как многофункционального транспортно-технологического аппарата - амфибии.
С целью расширения функциональных возможностей, эффективности действия и области использования аппарата за счет обеспечения устойчивости непрерывного передвижения шаганием без гидроподдержки под водой по дну моря и вне водной среды, сухопутного при повышении его качества и быстроходности и предлагается данное изобретение.
Поставленная цель достигается тем, что на плавучем или оборудованном средствами регулируемой положительной и отрицательной плавучести горизонтальном корпусе установлены две группы, содержащих одна - четыре (1-3-5-7) и другая - четыре (2-4-6-8) в порядке последовательного расположения по длине корпуса через одного, прямолинейно направляющих механизма, взаимодействующих согласованно между собой и приводами приводного механизма с возможностью одновременного, с поочередной сменяемостью нахождения одной группы в состоянии разнобортного вертикального поворота траверс с образованием попеременно опорами противоположных плеч коромысел опорных четырехугольников, а другой - в состоянии горизонтального поворота коромысел с образованным опорным четырехугольником.
Наличием в каждой группе четырех прямолинейно-направляющих механизмов достигается возможность при разно бортных вертикальных поворотах их траверс образования попеременно опорами противоположных плеч коромысел опорных четырехугольников, обеспечивающих устойчивость аппарата при движении.
А выполнением аппарата с двумя такими группами прямолинейно направляющих механизмов достигается возможность поочередной, на каждом шаге без останова движения сменяемости образуемых каждой группой опорных четырехугольников, чем обеспечивается непрерывность движения.
В совокупности эти два существенных качества обеспечивают устойчивое непрерывное передвижение аппарата шаганием под водой по поверхности дна без всякой гидроподдержки.
Однако для эффективного передвижения шаганием в водной и, тем более, сухопутного только этих необходимых качеств еще недостаточно.
Поэтому для обеспечения возможности эффективного передвижения шаганием и под водой по поверхности дна, и вне водной среды, сухопутного, причем с одновременным повышением быстроходности, приводной механизм аппарата выполнен состоящим из согласованно взаимодействующих приводов вертикального поворота траверс, выполненных в виде моментных гидродвигателей возвратно-поворотного действия, корпуса которых закреплены на (в) горизонтальном корпусе, а штоки через передаточные устройства соединены с поворотными устройствами траверс, и приводов горизонтального поворота коромысел, выполненных в виде расположенных вдоль траверс силовых гидроцилиндров, корпуса которых закреплены на траверсах или горизонтальном корпусе, а штоки шарнирно соединены с шарнирно-ползунными устройствами коромысел.
При этом с целью компактности конструкции приводы горизонтального поворота коромысел могут быть выполнены в виде силовых гидроцилиндров двухстороннего действия, штоки которых закреплены неподвижно на горизонтальном корпусе и служат траверсами, а подвижные корпуса снабжены шарнирами для установки коромысел и являются шарнирно-ползунными устройствами.
С целью согласованности взаимодействия прямолинейно направляющих и приводного механизмов моментные гидродвигатели вертикального поворота траверс и гидроцилиндры горизонтального поворота коромысел включены в единую гидравлическую систему с общим насосом, состоящую из двух гидравлических контуров, один из которых образован моментными гидродвигателями обеих групп прямолинейно-направляющих механизмов, а другой - гидроцилиндрами этих групп, а насос подключен к установленному в (на) корпусе аппарата бортовому дизель-генератору.
Способ передижения описываемого аппарата, заключающийся в перемещении с подъемом-опусканием опор противоположных плеч коромысел - при вертикальном повороте траверс и с отталкиванием от опорной поверхности - при горизонтальном повороте коромысел прямолинейно-направляющих механизмов, состоит в следующем.
Перемещение опор производят с образованием попеременно опорами противоположных плеч коромысел поочередно сменяющих друг друга групп (1-3-5-7) и (2-4-6-8) прямолинейно-направляющих механизмов опорных четырехугольников.
При этом в каждой из групп прямолинейно-направляющих механизмов при опускании опор путем опережения началом горизонтального поворота коромысел окончания вертикального поворота траверс опорам придают опережающее их постановку на опорную поверхность перемещение в направлении отталкивания, причем со скоростью не ниже текущей скорости движения аппарата, а подъем опор, путем опережения началом вертикального поворота траверс окончания горизонтального поворота коромысел, осуществляют с опережением окончания отталкивания опорами.
А при поочередной смене опорных четырехугольников групп (1-3-5-7) и (2-4-6-8) прямолинейно-направляющих механизмов, путем опережения окончанием вертикального поворота траверс с опусканием опор одной группы начала вертикального поворота траверс с подъемом опор другой группы, постановку опор опорного четырехугольника на опорную поверхность группы, опускающей опоры, производят с опережением отрыва от не опор опорного четырехугольника группы, поднимающей опоры.
Приданием опорам опорных четырехугольников опережающего их постановку на опорную поверхность перемещения в направлении отталкивания, причем со скоростью, не меньшей текущей скорости движения аппарата (равной при равномерном движении и большей при ускоренном), исключается возможность спотыкания опор о грунт и прерывания движения.
А опережением подъема опорных четырехугольников момента завершения их опорами фазы отталкивания исключается возможность торможения отшагавшими опорами.
Этим повышается качество (плавность, равномерность) непрерывного движения аппарата шаганием.
В свою очередь, опережением постановкой опорных четырехугольников на опорную поверхность момента их отрыва от нее при поочередной групповой смене прямолинейно-направляющих механизмов достигается перекрытие шагов опорами сменяющих друг друга опорных четырехугольников.
Этим исключается возможность провалов (падения) корпуса в процессе непрерывного движения.
В своей совокупности вышеописанные новые технические решения позволяют эффективно осуществить устойчивое непрерывное и качественное передвижение аппарата шаганием как без гидроподдержки под водой по поверхности дна, так и сухопутного на берегу.
Изобретение поясняется на следующих чертежах.
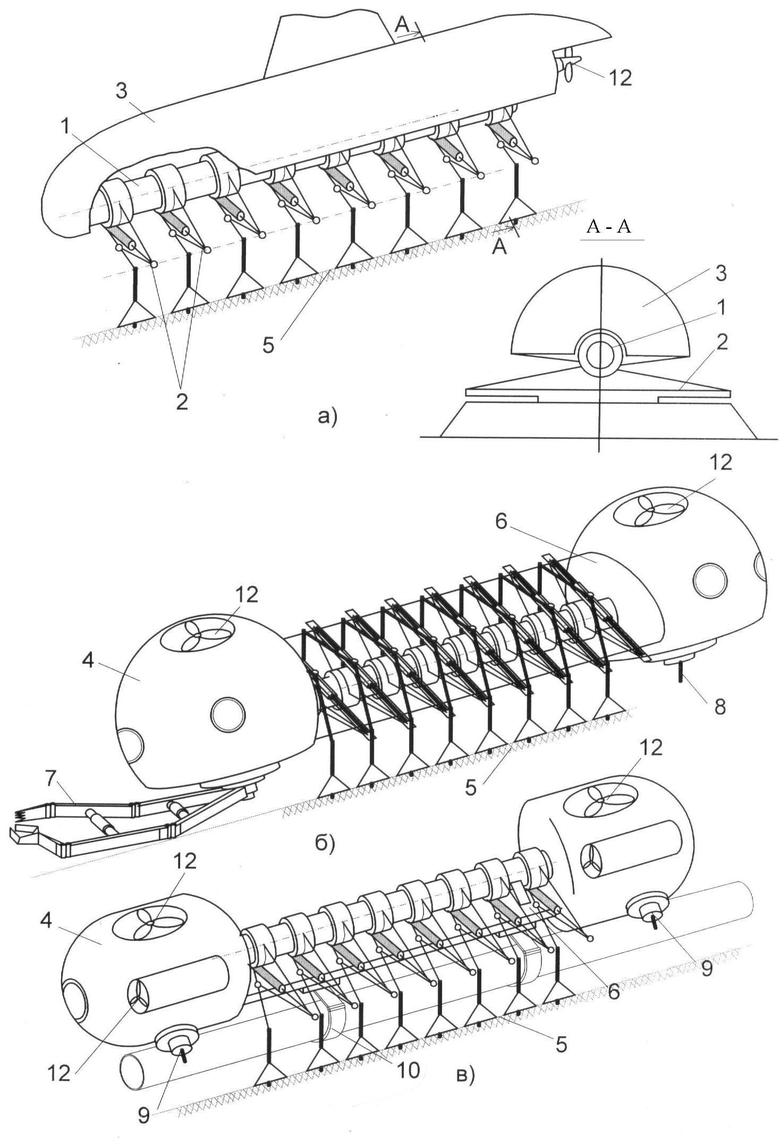
На фиг.1 показаны некоторые варианты общего вида описываемого плавуче-шагающего аппарата различного назначения.
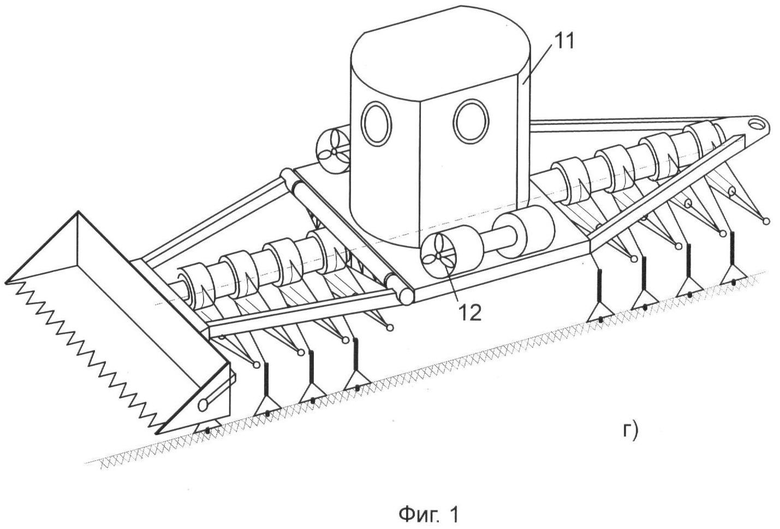
На фиг.2 показана конструкция шагающего модуля ходовой части аппарата с прямолинейно-направляющим механизмом.
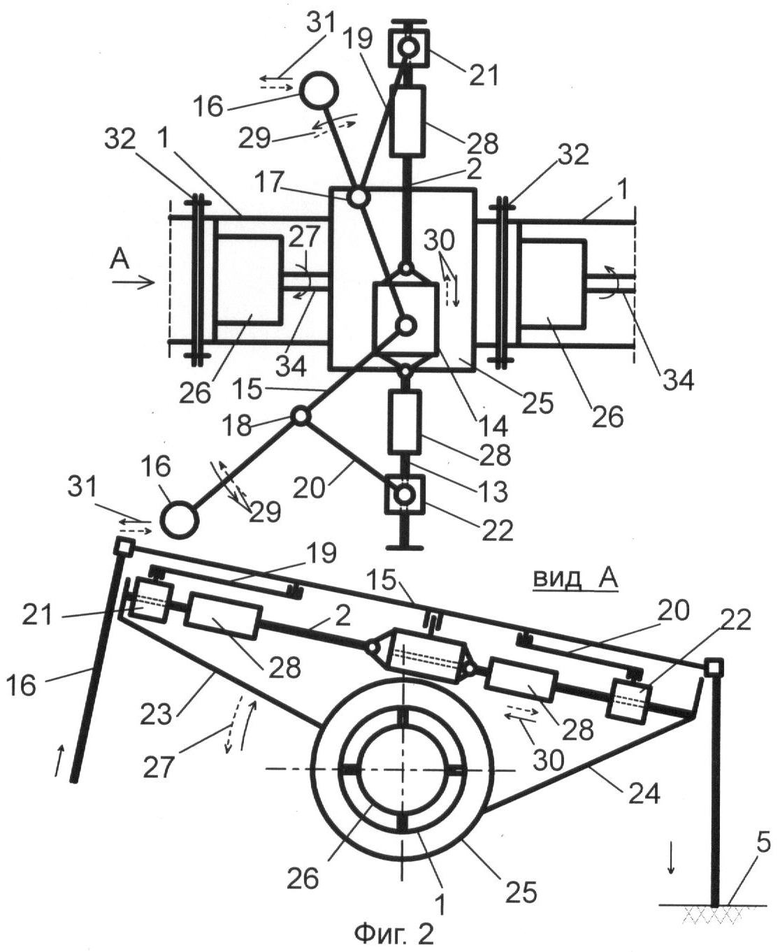
На фиг.3 показана конструктивно-кинематическая схема шагающего механизма.
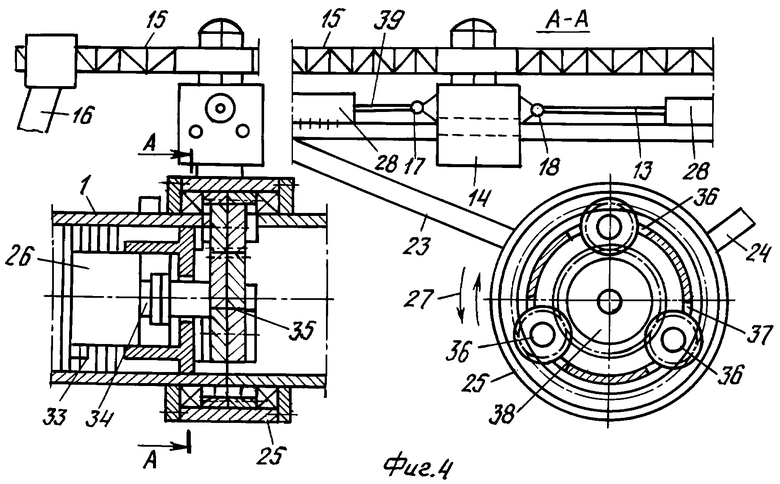
На фиг.4 показана конструкция привода вертикального поворота прямолинейно-направляющего механизма.
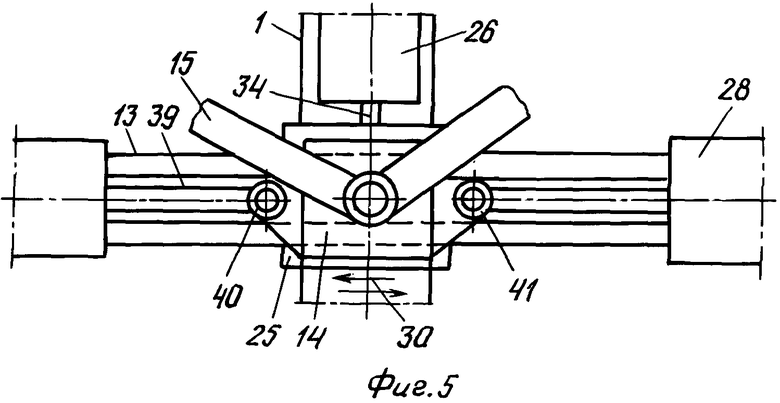
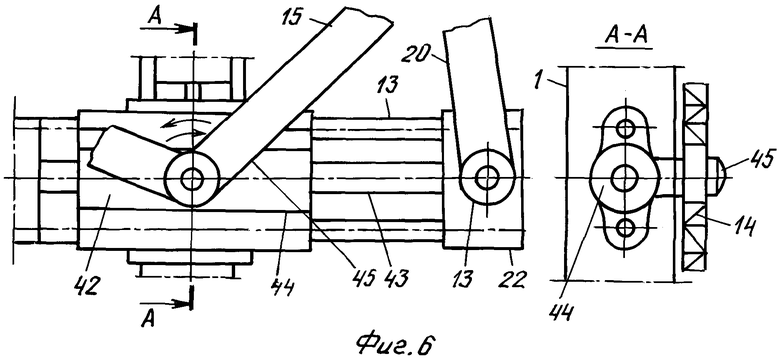
На фиг.5, 6 показаны варианты конструкции привода горизонтального поворота прямолинейно-направляющего механизма.
На фиг.7 показана гидравлическая схема приводного механизма.
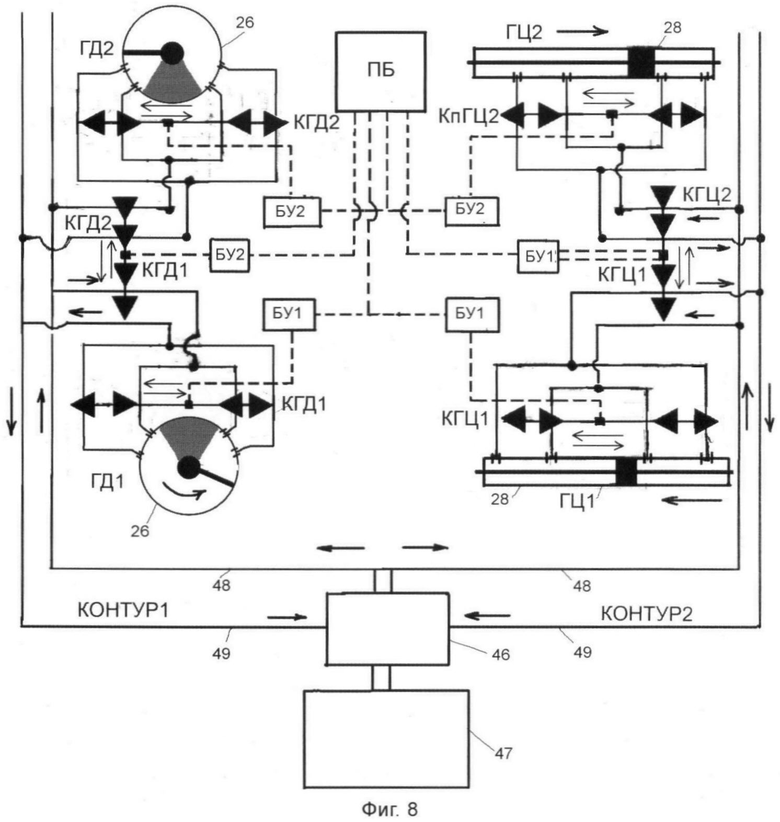
На фиг.8 показана схема механизма согласования взаимодействия прямолинейно-направляющих и приводного механизмов.
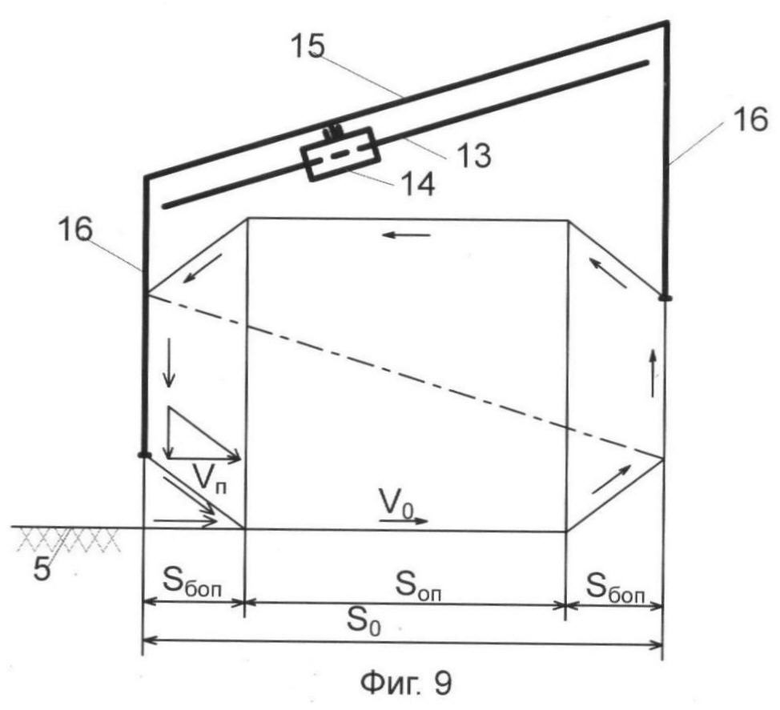
На фиг.9 показана шаговая траекторная диаграмма перемещения опоры прямолинейно-направляющего механизма.
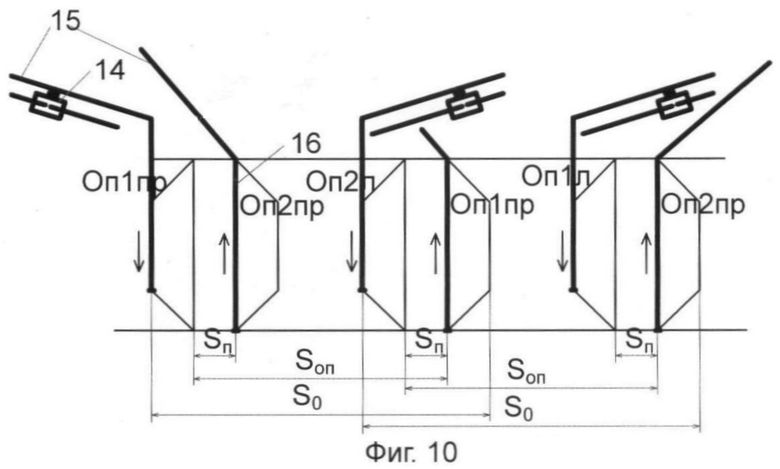
На фиг.10 показана траекторная диаграмма перемещения опор поочередно сменяющих друг друга прямолинейно-направляющих механизмов.
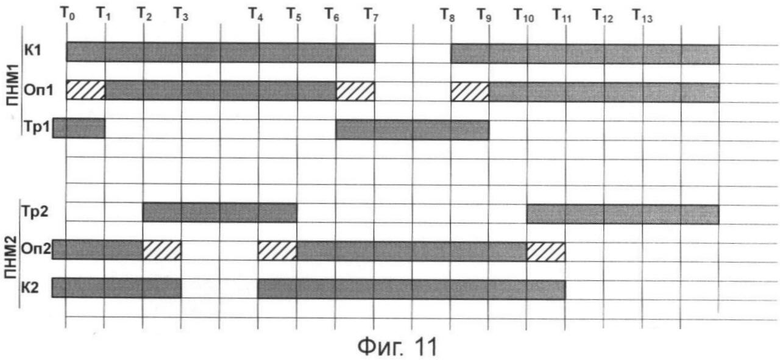
На фиг.11 показана фазово-временная диаграмма осуществления описываемого способа передвижения аппарата.
Описываемый аппарат включает плавучий или снабженный средствами регулируемой положительной и отрицательной плавучести горизонтальный корпус 1 и установленные по его длине прямолинейно-направляющие механизмы 2, образующие в совокупности его ходовую часть для передвижения шаганием (шагающий движитель), и в зависимости от назначения может иметь различную конструкцию и, соответственно, общий вид (фиг.1).
На фиг.1а показана шагающая подводная лодка с обитаемым корпусом 3, конструктивно связанным с корпусом 1 ее шагающего движителя.
На фиг.1б, в показан общий вид подводного плавуче-шагающего аппарата, в котором отдельные, в частности концевые, участки корпуса 1 выполнены в виде той или иной формы прочных (обитаемых или не обитаемых) капсул 4 с регулируемой плавучестью.
5 - поверхность морского дна (опорная поверхность, грунт).
6 - возможные силовые платформы для крепления различного технологического, энергетического, навигационного и прочего используемого в подводной технике оборудования и рабочего инструмента.
Для примера условно показаны:
7 - механические манипуляторы, 8 и 9 - буровые и сварочные устройства, 10 - силовые захваты для переноса груза, например трубы; на фиг.1г показан возможный вид плавуче-шагающего бульдозера-тягоча с вертикальным корпусом 11 с регулируемой плавучестью. 12 - горизонтальные и вертикальные движители, например винтовые, для передвижения на плаву.
Автоматическое управление в режиме передвижения берег-морское дно-берег может осуществляться по кабелю с берега или судна (не показано).
В зависимости от назначения и области применения возможны и другие архитектурно-конструктивные схемы.
Каждый ПНМ 2 содержит связанную с приводами поворотов относительно корпуса 1 поперечную траверсу 13 и установленную на ней на шарнирно-ползунном устройстве (далее ШПУ) 14 углообразное коромысло 15 с опорными элементами (опорами) 16, установленными на его противоположных плечах (фиг.2).
Середины противоположных плеч коромысла 15 шарнирами 17, 18 соединены с рычагами 19, 20 половинной длины его плеч. Рычаги 19, 20 с помощью шарнирно-ползунных устройств (ШПУ) 21, 22 соединены с траверсой 13.
Каждый ПНМ 2 траверсой 13 с помощью раскосых стоек 23, 24 закреплен на поворотном устройстве 25, связанном с приводом 26 вертикального поворота относительно корпуса 1 (прямого и обратного, показано стрелками 27) траверсы 13, в результате чего происходит подъем-опускание опор 16 противоположных плеч коромысла 15 (на виде по стрелке А фиг.2 показано стрелками вверх-вниз).
Так производится попеременная смена опор 16 противоположных плеч коромысла 15.
ПШУ 14 связано с приводом (дами) 28 горизонтального поворота относительно корпуса 1 (прямого и обратного, стрелки 29) коромысла 15.
При возвратно-поступательном (стрелки 30) перемещении ШПУ 14 по траверсе 13 опоры 16 противоположных плеч коромысла 15 совершают шагательные перемещения (стрелки 31).
В совокупности участок корпуса 1 и установленный на нем на поворотном устройстве 25 ПНМ 2 с приводами 26 и 28, соответственно, вертикального поворота траверсы 13 и горизонтального поворота коромысла 15 представляет собой отдельный шагающий модуль (фиг.2), из которого путем последовательной состыковки образуются шагающая ходовая часть аппарата, его шагающий движитель. 32 - условные стыковочные узлы.
Для обеспечения устойчивого непрерывного передвижения шаганием в водной среде (по поверхности дна моря) без всякой гидрозадержки, а также вне водной среды (сухопутного) на горизонтальном корпусе 1 описываемого аппарата установлены две группы ПНМ 2, содержащие одна четыре (1-3-5-7) и другая - четыре (2-4-6-8), в порядке последовательного расположения по длине корпуса через одного, ПНМ, которые взаимодействуют согласованно между собой и приводами 26, 28 приводного механизма с возможностью одновременного, с поочередной сменяемостью нахождения одной группы ПНМ в состоянии разнобортного вертикального поворота траверс 13 с образованием попеременно опорами 16 противоположных плеч коромысел 15 опорных четырехугольников, а другой - в состоянии горизонтального поворота коромысел 15 с образованным опорами 16 опорным четырехугольником (фиг.3).
На поясняющей это конструктивно-кинематической схеме фиг.3 строкой цифр 1, 2, 3, 4, 5, 6, 7, 8 сверху над чертежом указаны порядковые номера ПНМ на корпусе 1, а столбцом 1, 2, 3, 4 отмечены последовательные их групповые шаги. (С целью упрощения чертежа приводы и прочие элементы конструкции не показаны.)
На чертеже опоры 16 группы ПНМ, находящейся в состоянии горизонтального поворота коромысел 15 (соответственно, в фазе опоры на грунт и отталкивания от него), отмечены закрашенными окружностями, а образованные ими опорные четырехугольники выделены штрихпунктирными линиями.
Опоры 16 группы ПНМ, находящейся при этом в состоянии вертикального поворота траверс 13 (соответственно, в фазе бортовой смены опор 16 противоположных плеч коромысел 15), отмечены незакрашенными окружностями.
Механизм образования попеременно опорами 16 противоположных плеч коромысел 15 ПНМ каждой из групп (1-3-5-7) и (2-4-6-8) опорных четырехугольников состоит в следующем.
В группе ПНМ (1-3-5-7) опорные четырехугольники образуются попеременно однобортными (находящимися в опоре на грунт по одну сторону от борта корпуса 1) опорами ПНМ под номерами 1, 3 и 5, 7, а в группе ПНМ (2-6-4-8) - однобортными опорами ПНМ под номерами 2, 4 и 6, 8. При этом, если на шаге 1 группа ПНМ (1-5-3-7) находится в состоянии горизонтального поворота коромысел 15 (в фазе опоры и отталкивания образованным опорами ПНМ под номерами 1, 3, 5, 7 четырехугольником), то группа ПНМ (2-6-4-8) находится в состоянии вертикального поворота траверс 13 с подъемом-опусканием опор 16 противоположных плеч их коромысел 15 (в фазе бортовой смены опор).
На следующем шаге 2 (после того как четырехугольник 1, 3, 5, 7 отшагал) уже группа ПНМ (2-4-6-8) находится в состоянии горизонтального поворота коромысел 15 (в фазе опоры и отталкивания образованным опорами ПНМ под номерами 2, 4, 6, 8 четырехугольником), а группа ПНМ (1-5-3-7) находится в состоянии вертикального поворота траверс 13 с подъемом-опусканием опор 16 противоположных плеч их коромысел 15 (в фазе бортовой смены опор).
На следующих шагах 3 и 4 картина повторяется, но опорные четырехугольники уже образуются опорами противоположных плеч коромысел этих ПНМ.
И так далее.
Так, что в каждой из вышеуказанных групп ПНМ опорные четырехугольники попеременно, через шаг образуются опорами 16 то левых, то правых плеч коромысел 15. А групповая смена опорных четырехугольников ПНМ производится поочередным на каждом шаге вертикальным групповым поворотом их траверс 13.
Таким образом осуществляется механизм непрерывного образования и поочередной сменяемости опорных четырехугольников, обеспечивающий процесс устойчивого непрерывного передвижения шаганием.
Осуществляющий это приводной механизм состоит из согласованно взаимодействующих приводов 26 вертикального поворота траверс 13, выполненных в виде: моментных гидродвигателей возвратно-поворотного действия и приводов 28 горизонтального поворота коромысел 15, выполненных в виде силовых гидроцилиндров (фиг.4, 5, 6).
Моментные гидродвигатели возвратно-поворотного действия 26 (фиг.4) установлены и закреплены своим корпусами 33 в корпусе 1 и штоками 34 связаны с передаточными устройствами 35, установленными в зубчатом зацеплении с поворотными устройствами 25.
Передаточное устройство 35 выполнено в виде планетарного механизма, например (как показано на фиг.4), с тремя сателлитами 36, взаимодействующими с внутренней зубчаткой поворотного устройства 25.
37 - щелевые окна в корпусе 1 для установки сателлитов 36.
38 - ведущая шестерня штока 34 гидродвигателя 26.
Силовые гидроцилиндры 28 расположены вдоль траверсы 13, их неподвижные корпуса закреплены на корпусе 1 или траверсе 13, а подвижные штоки 39 с помощью шарниров 40, 41 соединены с ШПУ 14 траверсы 13 (фиг.5).
С целью компактности конструкции ПНМ 2 привод горизонтального поворота коромысла 15 выполнен в виде гидроцилиндра 42 двухстороннего действия, шток 43 которого закреплен неподвижно на корпусе 1 и служит траверсой 13, а подвижный корпус 44 снабжен шарниром 45 для установки коромысла 15 и является ШПУ (фиг.6).
При этом с целью исключения проворота ШПУ относительно траверс на фиг.5,6 показана конструкция ПНМ с взаимно параллельными сдвоенными траверсами 13 с едиными ШПУ 21, 22.
Сама по себе конструкция моментных гидродвигателей и гидроцилиндров известна.
Синхронизация группового действия приводов приводного механизма (моментных гидродвигателей 26 и гидроцилиндров 28 или 42) внутри каждой группы ПНМ (внутри групповая) и между группами ПНМ (межгрупповая) может быть обеспечена включением их в единый гидравлический контур с общим насосом 46 (фиг.7). Насос 46 подключен к установленному в (на) корпусе 1 бортовому дизель-генератору 47.
На фиг.7 показана возможная гидравлическая схема двухгрупповой (с группами ПНМ (1-3-5-7) и (2-4-6-8) конструкции шагающего механизма.
Данная гидросистема выполнена состоящей из двух гидравлических контуров, содержащих подключенные к рабочим полостям моментных гидродвигателей 26 и гидроцилиндров 28 напорные 48 и отводящие (сливные) 49 трубопроводы, причем моментные гидродвигатели 26 обеих групп ПНМ образуют связанные с насосом 46 один, а их гидроцилиндры 28 - другой гидравлические контуры.
Внутри- и межгрупповое согласованное взаимодействие ПНМ и приводов 26, 28 приводного механизма может быть обеспечено использованием известных средств автоматики.
В частности, в соответствии с общей гидравлической схемой (фиг.7) на фиг.8 на примере двух отдельных ПНМ, выделенных из групп (1-3-5-7) и (2-4-6-8) и обозначенных, соответственно, как ПНМ1 и ПНМ2 (соответствуют порядковым номерам ПНМ на фиг.3) показана возможная принципиальная схема механизма согласования такого взаимодействия.
Обозначения:
ГД1, ГД2 - моментные гидродвигатели,
ГЦ1, ГЦ2 - гидроцилиндры, относящиеся, соответственно, к ПНМ1 и ПНМ2;
КпГД1 и КпГД2 - автоматические клапаны-переключатели их рабочих полостей для выполнения ими прямого и обратного действия. КГД1, КГД2 и КГЦ1, КГЦ2 - автоматические клапаны, обеспечивающие включение в работу и выключение, соответственно ГД1, ГД2 и ГЦ1, ГЦ2.
Работой клапанов управляют электронные блоки, условно БУ1 и БУ2, связанные (показано пунктирными линиями) с задающим общий режим действия программным блоком ПБ, связанным с органом управления движением аппарата.
Механизм согласования по данной схеме описан ниже в связи с осуществлением способа передвижения аппарата.
Способ передвижения описываемого аппарата, заключающийся в перемещении опор 16 противоположных плеч коромысел 15 с подъемом-опусканием - при вертикальном повороте траверс 13 и с отталкиванием от опорной поверхности 5 - при горизонтальном повороте коромысел 15 ПНМ 2, состоит в следующем.
Перемещение опор 16 производят с образованием попеременно опорами противоположных плеч коромысел 15 поочередно сменяющих друг друга групп ПНМ (1-3-5-7) и (2-4-6-8) опорных четырехугольников.
Причем осуществляют это при непрерывном движении аппарата.
На приведенной на фиг.3 схеме показан полный фазовый цикл процесса шагания поочередно сменяющими друг друга опорными четырехугольниками двух вышеуказанных групп ПНМ (1-3-5-7) и (2-4-6-8), состоящий из четырех шагов (или этапов), обозначенных на схеме вертикальным столбцом цифр 1, 2, 3, 4.
Далее в тексте для упрощения изложения ПНМ, соответствующие порядковым номерам 1, 2, 3…, обозначены как ПНМ1, ПНМ2, ПНМ3 и т.д.
Стрелкой 50 показано направление шагания.
Итак, на первом шаге (этапе 1) группа ПНМ (1-3-5-7) находится в состоянии горизонтального поворота коромысел 15, соответственно, в фазе опоры и отталкивания (шагания) опорным четырехугольником, образованным (см. по стрелке 50) однобортными правыми опорами ПНМ1 и ПНМ5 и левыми ПНМ3 и ПНМ7, а группа ПНМ (2-4-6-8) находится в состоянии вертикального поворота траверс 13, соответственно, в фазе бортовой смены опор 16.
На втором шаге (этапе 2) в фазе опоры и отталкивания (шагания) находится опорный четырехугольник, образованный однобортными левыми опорами ПНМ2 и ПНМ6 и правыми опорами ПНМ4 и ПНМ8 группы (2-4-6-8), а группа ПНМ (1-3-5-7) находится в состоянии вертикального поворота траверс 13, соответственно, в фазе бортовой смены опор.
На третьем шаге (этапе 3) в фазе шагания находится опорный четырехугольник, образованный левыми опорами ПНМ1 и ПНМ5 и правыми ПНМ3 и ПНМ7 группы (1-3-5-7); а группа ПНМ (2-4-6-8) находится в фазе бортовой смены опор.
Наконец, на четвертом шаге (этапе 4) в фазе шагания находится опорный четырехугольник группы (2-4-6-8), образованный правыми опорами ПНМ2 и ПНМ6 и левыми опорами ПНМ4 и ПНМ8, а группа ПНМ (1-3-5-7) находится в фазе бортовой смены опор.
На этом фазовый цикл, состоящий из четырех шагов (этапов), заканчивается и шагающий механизм возвращается в исходное положение первого шага (этапа 1).
Как видно из чертежа, форма и положение относительно корпуса образуемого опорного четырехугольника на каждом шаге видоизменяются, но центр масс всегда остается в площади опоры, что обеспечивает устойчивость движения.
Для обеспечения непрерывного качественного движения шаганием при смене опорных четырехугольников поочередно сменяющих друг друга групп (1-3-5-7) и (2-4-6-8) ПНМ поступают следующим образом (см. фиг.9, 10).
Во-первых, в каждой из групп (1-3-5-7) и (2-4-6-8) ПНМ при опускании опор 16 им придают опережающее их постановку на опорную поверхность 5 перемещение в направлении отталкивания, причем со скоростью не ниже текущей скорости движения аппарата.
На диаграмме фиг.8 изображена поясняющая это шаговая траектория перемещения опор 16 противоположных плеч коромысла 15 отдельного ПНМ 2 относительно корпуса 1.
Здесь и далее:
стрелками на соответствующих участках траекторий показаны направления перемещения опор 16 по траектории. При этом штрихпунктирной линией условно отделены участки траекторий опор 16 противоположных плеч коромысла 15;
So - полный (номинальный) шаг опоры 16, соответствующий номинальному углу горизонтального поворота относительно корпуса 1 коромысла 15;
Sоп - опорный шаг (шаговое перемещение корпуса 1),
Sбоп - величина без опорного перемещения опор 16 при их опускании и подъеме.
Согласно вышесказанному перед постановкой на грунт 5, путем расчетного опережения началом горизонтального поворота коромысла 15 окончания вертикального поворота траверсы 13 опоре 16 придают перемещение в направлении шагания.
При этом горизонтальная скорость Vп перемещения опоры 16 (горизонтальная составляющая полной скорости ее перемещения при одновременном вертикальном повороте траверсы 13 и горизонтальном повороте коромысла 15) должна быть равной (или большей скорости Vo передвижения в данный момент аппарата, т.е. Vп=Vo (или Vп>Vo при ускорении шагания).
Этим исключается возможность спотыкания опорами 16 при постановке опорного четырехугольника на опорную поверхность 5.
Во-вторых, подъем опор 16 опорного четырехугольника производят с расчетным опережением окончания их шагания (отталкивания от грунта 5).
Этим исключается возможность торможения движения аппарата отшагавшими опорами 16.
Осуществляют это внутри каждой группы ПНМ путем расчетного опережения началом вертикального поворота траверс 13 с подъемом опорного четырехугольника и отрывом его опор 16 от опорной поверхности 5 окончания горизонтального поворота коромысел 15. Очевидно, за счет этого сокращается длина опорного шага Soп=So-2Sбoп
Вместе с тем, (в-третьих) при поочередной смене групп ПНМ (см. фиг.10) постановку на опорную поверхность опорного четырехугольника группы ПНМ, завершающей фазу бортовой смены опор 16 с их опусканием на опорную поверхность 5, производят с опережением на расчетный период времени момента отрыва опор 16 опорного четырехугольника от опорной поверхности 5 группы ПНМ, завершающей фазу отталкивания и поднимающей опоры.
И осуществляют это путем расчетного опережения окончанием вертикального поворота траверс 13 с опусканием опорного четырехугольника одной группы ПНМ начала вертикального поворота траверс 13 с подъемом опорного четырехугольника другой группы ПНМ, которую сменяет первая.
Этим исключается возможность провалов (падений) корпуса 1 при поочередной групповой смене ПНМ в процессе непрерывного движения аппарата.
Этот механизм поясняется на совмещенной траекторией диаграмме перемещения опор 16 сменяющих друг друга ПНМ1 и ПНМ2 (считай опорных четырехугольников групп ПНМ (1-3-5-7) и (2-4-6-8)) (фиг.10).
Индексами «л» и «пр» на чертеже и далее в тексте обозначены левая и правая опоры 16. Остальные обозначения остаются прежними.
На диаграмме показано, как траектории опор ПНМ1 и ПНМ2 на каждом шаге перекрывают друг друга на расчетную величину Sп.
Эту диаграмму следует рассматривать совместно с приведенной на фиг.11 совмещенной фазово-временной диаграммой, построенной также для двух взаимодействующих согласованно между собой и приводами ПНМ1 и ПНМ2 (считай для групп ПНМ (1-3-5-7) и (2-4-6-8)).
На диаграмме фиг.11 обозначены:
К1, К2 - коромысла, Оп1, Оп1 - опоры, Тр1, Тр2 - траверсы, относящиеся, соответственно, к ПНМ1 и ПНМ2.
Закрашенными горизонтальными полосами показаны временные периоды, в течение которых элементы ПНМ находятся в движении, а именно: коромысла 16 совершают горизонтальные повороты, траверсы 13 - вертикальные повороты, а опоры 16 - шагательные перемещения.
При этом временные периоды без опорного шагательного перемещения опор 16 показаны заштрихованными участками этих полос.
Позициями To, T1.T2.T3… сверху отмечены моменты времени начала и окончания этих поворотов и перемещений в фазовом цикле процесса шагания, показанном на фиг.3.
Итак, пооперационно, с одновременным указанием действия и технического средства его выполнения согласно приведенной на фиг.8 схеме, описываемый способ передвижения аппарата осуществляется следующим образом (см. фиг.11, 10 совместно с фиг.8, 9).
Примем, что к моменту То поочередно сменяющие друг друга ПНМ1 и ПНМ2 (считай четырехугольники групп ПНМ (1-3-5-7) и (2-4-6-8)) находятся в следующих фазовых состояниях.
ПНМ 1 завершает бортовую смену опор, и в момент Т1, например, его правая опора Оп1пр готова встать на грунт, а ПНМ2 находится еще в состоянии завершения фазы опоры отталкивания, и ее правая опора Оп2пр готова оторваться от грунта (фиг.10).
В момент То с расчетным опережением момента Т1 постановки Оп1пр на грунт (открытием КЦ1 и включением в работу ГЦ1 совместно с работающими ГД1 и ГЦ2) (этот момент зафиксирован на схеме фиг.8) начинают горизонтальный поворот К1 и безопорное перемещение (шагание) Оп1пр (фиг.10), причем со скоростью, равной текущей скорости движения аппарата (Vп=Vo) (см. фиг.9).
(Т1-То) - расчетный период безопорного (Sбоп) шагания Оп1пр.
Этим исключают возможность спотыкания Оп1пр при постановке на грунт 5.
В момент Т1 вместе с постановкой Оп1пр на грунт (закрытием КГД1 и отключением ГД1 при включенном в работу ГЦ1 и еще работающем ГЦ2) прекращают вертикальный поворот Тр1.
Поскольку при этом ГЦ2 продолжает работать и К2 выполняет горизонтальный поворот, то в течение периода (Т2-Т1) имеет место перекрытие (Sп) шагов совместно шагающими Оп1пр и Оп2пр (фиг.10).
Этим исключают провал корпуса при смене Оп2пр на Оп1пр (считай при смене четырехугольника ПНМ группы (2-4-6-8) на четырехугольник ПНМ группы (1-3-5-7)).
(Т2-Т1) - период совместного шагания Оп1пр и Оп1пр с перекрытием шагов (Sп).
В следующий момент Т2 с опережением на расчетный период времени момента Т3 окончания поворота К2 и завершения шагания Оп2пр (открытием КГД2 и включением ГД2 при работающем ГЦ2, а также переключением КпГД2 рабочей полости ГД2) начинают обратный предыдущему вертикальный поворот Тр2 с подъемом и отрывом от грунта Оп2пр и опусканием Оп2л.
(Т3-Т2) - расчетный период безопорного (S6on) перемещения Оп2пр при подъеме (фиг.10, 9.).
Этим исключают возможность торможения Оп2пр при ее подъеме.
Т3 - момент окончания шагания Оп2пр (закрытием КЦ2 и отключением ГЦ2).
В момент Т4 с расчетным опережением момента Т5 постановки Оп2л на грунт (открытием КЦ2 и включением ГЦ2 при работающем ГД2) начинают горизонтальный поворот К2 с безопорным перемещением Оп2л, причем со скоростью, равной текущей скорости движения аппарата (Vп=Vo) (фиг.9).
(Т5-Т4) - расчетный период безопорного (Sбоп) шагания Оп2л.
Этим исключают возможность спотыкания Оп2л при постановке на грунт.
В момент Т5 вместе с постановкой Оп2л на грунт (закрытием КГД2 и отключением ГД2) прекращают вертикальный поворот Тр2.
Поскольку при этом ГЦ1 продолжает работать и К1 выполняет горизонтальный поворот, то в течение периода (Т6-Т5) имеет место перекрытие шагов (Sп) совместно шагающими Оп1пр и Оп2л (фиг.10).
Этим исключают провал корпуса при смене Оп1пр на Оп1л.
В следующий момент Т6 с опережением на расчетный период времени момента Т7 окончания поворота К1 и завершения шагания Оп1пр (открытием КГД1 и включением ГД1 при работающем ГЦ1, а также переключением КпГД1 рабочей полости КГД1) начинают обратный вертикальный поворот Тр1 с отрывом Оп1пр от грунта и опусканием Оп1л.
(Т7-Т6) - расчетный период безопорного (S6on) перемещения Оп1пр при подъеме.
Этим исключают возможность торможения Оп1пр при подъеме и отрыве от грунта.
Т7- момент окончания шагания Оп1пр (закрытием КЦ1 и отключением ГЦ1).
В следующий момент Т8 с расчетным опережением момента Т9 постановки Оп1л на грунт (открытием КЦ1 и включением ГЦ1 при работающем ГД1) начинают горизонтальный поворот К1 с без опорным перемещением Оп1л, причем со скоростью, равной скорости движения аппарата (Vп=Vо) (фиг.9).
(Т9-Т8) - расчетный период безопорного (Sбоп) шагания Оп1л (фиг.10).
Этим исключают возможность спотыкания Оп1л при постановке на грунт.
В момент Т9 вместе с постановкой Оп1л на грунт (закрытием КГД1 и отключением ГД1) прекращают вертикальный поворот Тр1.
В момент Т10 с опережением на расчетный период времени момента Т11 окончания поворота К2 и завершения шагания Оп2л (открытием КГД2 и включением ГД2 при работающем ГЦ2, а также переключением КпГД2 рабочей полости КГД2) начинают обратный вертикальный поворот Тр2 с отрывом Оп2л от грунта и опусканием Оп2пр.
(Т11-Т10) - расчетный период безопорного (Sбоп) перемещения Оп2л при подъеме.
Этим исключают возможность торможения Оп2л при подъеме и отрыве от грунта.
Поскольку при этом ГД2 продолжает работать и К2 выполняет горизонтальный поворот, то в течение периода (Т10-Т9) имеет место перекрытие (Sп) шагов совместно шагающими Оп1л и Оп2пр (фиг.10).
Этим исключают провал корпуса при смене Оп2пр на Оп1л.
Т11 - момент окончания шагания Оп2л (закрытием КЦ2 и отключением ГЦ2).
И так далее до завершения фазового цикла (фиг.3), после чего аналогичным образом осуществляются все последующие.
Эффективность изобретения характеризуется следующим образом.
Плавуче-шагающий аппарат-амфибия обеспечивает качественое устойчивое непрерывное передвижение шаганием без гидроподдержки под водой по дну моря и вне водной среды, сухопутное.
При передвижении шаганием аппарат имеет высокую быстроходность, прямой, задний и боковой ход и устойчив при шагании в гору, под уклон и при боковом уклоне.
Поперечная разнесенность плеч коромысел с опорами обеспечивает ему максимальную боковую (бортовую) устойчивость.
Как «многоножка» аппарат имеет повышенные опорно-тяговые характеристики.
Благодаря этим новым качествам аппарат имеет расширеные функциональные возможности, эффективность действия и область использования, в особенности, в режиме передвижения «берег-морское дно-берег».
Источники информации
1. А.с. №504873, Е21С 50/00, 1976 г.
2. Патент РФ №2214940, МКИ B63G 8/00, Е21С 50/00, 2003 г. - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩАЯ МАШИНА И СПОСОБ ЕЕ ШАГАНИЯ | 2009 |
|
RU2403166C1 |
| ПОДЪЕМНО-ТРАНСПОРТНАЯ МАШИНА | 2009 |
|
RU2418736C2 |
| ШАГАЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2008 |
|
RU2374119C1 |
| ПЛАВУЧЕ-ШАГАЮЩИЙ ДОННЫЙ АППАРАТ | 2001 |
|
RU2214940C2 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ НА СПУТНИКЕ ОРБИТАЛЬНОГО КОСМИЧЕСКОГО ОБЪЕКТА | 2015 |
|
RU2604765C2 |
| ПОДВОДНЫЙ ДОБЫВАЮЩИЙ АППАРАТ И СПОСОБ ЕГО РАБОТЫ | 2008 |
|
RU2371580C1 |
| ШАГАЮЩИЙ ПРОБООТБОРНИК | 2022 |
|
RU2780038C1 |
| ЭКЗОСКЕЛЕТОН ИНВАЛИДА | 2012 |
|
RU2493805C1 |
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ МНОГОСЕКЦИОННОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ КРУГОВОГО ДЕЙСТВИЯ | 2012 |
|
RU2495562C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |

Изобретение относится к плавуче-шагающим транспортным устройствам, способным передвигаться по дну под водой и вне водной среды. Плавуче-шагающий аппарат содержит корпус, шагающий движитель, состоящий из корпуса и установленных последовательно по его длине прямолинейно-направляющих механизмов с опорами на противоположных плечах коромысел. На корпусе установлены две группы, содержащие одна четыре (1-3-5-7) и другая - четыре (2-4-6-8) в порядке последовательного расположения по длине корпуса через одного прямолинейно-направляющих механизма, взаимодействующих согласованно между собой и приводами приводного механизма с возможностью одновременного, с поочередной сменяемостью нахождения одной группы в состоянии разнобортного вертикального поворота траверс, с образованием попеременно опорами противоположных плеч коромысел опорного четырехугольника, а другой - в состоянии горизонтального поворота коромысел с образованным опорным четырехугольником. Способ передвижения плавуче-шагающего аппарата заключается в перемещении опор противоположных плеч коромысел с подъемом-опусканием - при вертикальном повороте траверс и с отталкиванием от опорной поверхности - при горизонтальном повороте коромысел прямолинейно-направляющих механизмов. Новым в способе передвижения аппарата является то, что при опускании опор путем опережения началом горизонтального поворота коромысел окончания вертикального поворота траверс опорам придают опережающее их постановку на опорную поверхность перемещение в направлении отталкивания со скоростью не ниже текущей скорости движения аппарата. Подъем опор осуществляют путем опережения началом вертикального поворота траверс окончания горизонтального поворота коромысел, осуществляют с опережением окончания отталкивания опорами от опорной поверхности. Достигается расширение функциональных возможностей, обеспечивается устойчивость передвижения шаганием. 2 н. и 2 з.п. ф-лы, 11 ил.
1. Плавуче-шагающий аппарат, включающий плавучий или оборудованный средствами плавучести горизонтальный корпус и установленные последовательно по его длине прямолинейно-направляющие механизмы, содержащие связанные с приводами поворотов относительно корпуса траверсы и установленные на них на шарнирно-ползунных устройствах углообразные коромысла с опорами на противоположных плечах, соединенных подвижно рычагами половинной длины плеча коромысла с траверсами, отличающийся тем, что, с целью расширения функциональных возможностей, эффективности действия и области использования аппарата за счет устойчивости непрерывного передвижения шаганием без гидроподдержки под водой, по дну моря и вне водной среды при повышении его качества и быстроходности, на корпусе установлены две группы, содержащие одна четыре (1-3-5-7) и другая четыре (2-4-6-8) в порядке последовательного расположения по длине корпуса через один прямолинейно-направляющих механизмов, взаимодействующих согласованно между собой и приводами приводного механизма с возможностью одновременного с поочередной сменяемостью нахождения одной группы в состоянии разнобортного вертикального поворота траверс с образованием попеременно опорами противоположных плеч коромысел опорного четырехугольника, а другой - в состоянии горизонтального поворота коромысел с образованным опорным четырехугольником.
2. Плавуче-шагающий аппарат по п.1, отличающийся тем, что приводной механизм выполнен состоящим из согласованно взаимодействующих приводов вертикального поворота траверс, выполненных в виде моментных гидродвигателей возвратно-поворотного действия, корпуса которых закреплены на (в) горизонтальном корпусе, а штоки через передаточные устройства соединены с поворотными устройствами траверс и приводов горизонтального поворота коромысел, выполненных в виде расположенных вдоль траверс силовых гидроцилиндров, корпуса которых закреплены на траверсах или горизонтальном корпусе, а штоки шарнирно соединены с шарнирно-ползунными устройствами коромысел.
3. Плавуче-шагающий аппарат по пп.1 и 2, отличающийся тем, что, с целью согласованности взаимодействия, моментные гидродвигатели вертикального поворота траверс и гидроцилиндры горизонтального поворота коромысел приводного механизма включены в единую оснащенную автоматическими клапанными устройствами гидравлическую систему с общим насосом, состоящую из двух контуров, один из которых образован моментными гидродвигателями обеих групп прямолинейно-направляющих механизмов, а другой - их гидроцилиндрами, а насос подключен к установленному в (на) корпусе бортовому дизель-генератору.
4. Способ передвижения плавуче-шагающего аппарата, заключающийся в перемещении опор противоположных плеч коромысел с подъемом-опусканием при вертикальном повороте траверс и с отталкиванием от опорной поверхности при горизонтальном повороте коромысел прямолинейно-направляющих механизмов, отличающийся тем, что перемещение опор производят с образованием попеременно опорами противоположных плеч коромысел поочередно сменяющих друг друга групп (1-3-5-7) и (2-4-6-8) прямолинейно-направляющих механизмов опорных четырехугольников, при этом при опускании опор путем опережения началом горизонтального поворота коромысел окончания вертикального поворота траверс опорам придают опережающее их постановку на опорную поверхность перемещение в направлении отталкивания, причем со скоростью не ниже текущей скорости движения аппарата, а подъем опор путем опережения началом вертикального поворота траверс окончания горизонтального поворота коромысел осуществляют с опережением окончания отталкивания опорами от опорной поверхности, а при поочередной смене опорных четырехугольников групп (1-3-5-7) и (2-4-6-8) прямолинейно-направляющих механизмов путем опережения окончанием вертикального поворота траверс с опусканием опор одной группы начала вертикального поворота траверс с подъемом опор другой группы постановку опор опорного четырехугольника на опорную поверхность группы, опускающей опоры, производят с опережением отрыва от нее опор опорного четырехугольника группы, поднимающей опоры.
| ПЛАВУЧЕ-ШАГАЮЩИЙ ДОННЫЙ АППАРАТ | 2001 |
|
RU2214940C2 |
| US 4448145 А, 15.05.1984 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕРМЕТИЧНОСТИ СИСТЕМЫ ПОДАЧИ РАБОЧЕГО ТЕЛА К ИСТОЧНИКУ ПЛАЗМЫ, ПРЕИМУЩЕСТВЕННО В УСЛОВИЯХ ВАКУУМА | 2008 |
|
RU2377522C1 |
| Способ движения машин,преимущественной для подводной разработки полезных ископаемых и устройство для его осуществления | 1974 |
|
SU504873A1 |

