Изобретение относится к машиностроению, а конкретнее к зубчатым планетарным механизмам, в которых одно из центральных колес неподвижно, а сателлиты имеют подвижные геометрические оси.
Известен планетарный механизм [1, стр.495, рис.22.2.а]. В нем сателлит, установленный между подвижным и неподвижным колесами, вращается вокруг своей подвижной геометрической оси и движется вместе с водилом относительно общей неподвижной геометрической оси. Подвижность такого плоского механизма определяется по формуле Чебышева П.Л. [1, стр.39, формула (2.5)]

где n - число подвижных звеньев, p5 - число кинематических пар пятого класса, р4 - число кинематических пар четвертого класса.
В механизме число подвижных звеньев n=3: ведущее колесо, сателлит и водило, число кинематических пар пятого класса - шарниров p5=3, число кинематических пар четвертого класса р4=2. По формуле (1) подвижность такого планетарного механизма равна единице  означающей, что если задать движение ведущему колесу, все остальные звенья будут двигаться вполне определенно.
означающей, что если задать движение ведущему колесу, все остальные звенья будут двигаться вполне определенно.
Недостатком такого механизма является то, что при движении сателлита, имеющего смещенную относительно оси вращения всего механизма массу, в механизме появляется дисбаланс сил, вызванный переменной по направлению инерционной силой сателлита. Для устранения этого дисбаланса в механизм добавляют один или более сателлитов, которые компенсируют инерционные силы друг друга и уравновешивают весь механизм. Чаще всего для этой цели используют три сателлита [1, стр.498, рис.22.3.б]. Увеличение числа сателлитов производится не только с целью уравновешивания механизма, но и с целью разделения потоков мощности от ведущего колеса к водилу через три сателлита, что должно уменьшать усилия в соединениях ведущего колеса с каждым из сателлитов и каждого из сателлитов с водилом. При этом один из сателлитов является основным, а два других называются пассивными [2, стр.408].
Однако механизму с тремя сателлитами [1, стр.498, рис.22.3.б], принятому за прототип, присущ недостаток. В этом механизме число подвижных звеньев n=5 (ведущее звено, водило и три сателлита), число кинематических пар p5=5 (ведущее колесо со стойкой, трижды сателлиты с водилом и водило со стойкой), р4=6 (по два раза соединения зубьев трех сателлитов соответственно с ведущим звеном и с неподвижным колесом). По формуле (1) подвижность такого планетарного механизма равна  .
.
Для планетарного механизма с тремя сателлитами подвижность, равная минус единице, свидетельствует о его неработоспособности, неспособности к движению. Такие системы относят к дважды статически неопределимым [3, стр.269]. В теории машин такой результат объясняют наличием так называемых избыточных связей [4, стр.224]. О том, что в планетарном механизме с тремя сателлитами имеются избыточные связи, указывается в [2, стр.408]. Механизмы, в которых избыточные связи отсутствуют, называют самоустанавливающимися. Если механизм с избыточными связями насильно принудить к движению, то это, во-первых, приведет к большим потерям на трение, а значит к низкому коэффициенту полезного действия, а во-вторых, к неизбежному износу звеньев в местах лишних связей-контактов. В реальности это ведет к быстрому износу зубьев сателлитов, потери их контактов с ведущим звеном и к передаче мощности лишь через один - основной сателлит, т.е. через какое-то время два пассивных сателлита неизбежно начнут вращаться свободно, не передавая мощности.
Задачей изобретения является создание самоустанавливающегося планетарного механизма путем устранения в нем избыточных связей, что обеспечит свободное, безызносное движение сателлитов, увеличит срок службы планетарного механизма и позволит передавать мощность всеми сателлитами за все время работы механизма.
Решение задачи достигается свободной установкой двух из трех сателлитов трехсателлитного планетарного механизма относительно водила через посредство дополнительных звеньев - трехпарного звена и шатуна.
Сущность изобретения заключается в том, что предлагается самоустанавливающийся планетарный механизм, включающий центральное подвижное колесо с внешним зацеплением, неподвижное колесо с внутренним зацеплением, водило, три сателлита, один из которых - основной соединен в шарнир с водилом непосредственно, при этом пассивные сателлиты дополнительно соединяются в шарниры с трехпарным звеном, которое связывается с водилом через шатун, в виде эксцентрика.
На чертеже представлен предлагаемый самоустанавливающийся планетарный механизм. Механизм содержит в своем составе центральное подвижное колесо 1 с внешним зацеплением, основной сателлит 2, водило 3, ось которого является центральной осью механизма, два пассивных сателлита 4 и 5, дополнительно установленные трехпарное звено 6 и шатун 7, центральное неподвижное колесо 8 с внутренним зацеплением, выполненное за одно целое со стойкой, относительно которой рассматривается движение звеньев. Оси колес 1 и 8 соосны с центральной осью, а оси сателлитов 2, 4 и 5 выполнены подвижными.
Как следует из чертежа, неподвижным центральным колесом с внутренним зацеплением является колесо 8. Подвижным центральным колесом является колесо 1 с внешним зацеплением. Основной сателлит 2 соединен шарниром с водилом 3, пассивные сателлиты 4 и 5 дополнительно соединены шарнирами с трехпарным звеном 6, которое соединено с водилом 3 во вращательную кинематическую пару через шатун 7. Благодаря такому соединению, пассивные сателлиты 4 и 5 имеют возможность самоустанавливаться относительно ведущего колеса 1 и неподвижного колеса 8.
Работает механизм следующим образом. При приведении в движение центрального подвижного колеса 1, за счет зацепления с ним приходят в движение все три сателлита. При этом сателлит 2, как основной, отталкивается от неподвижного звена 8, приводит в движение водило 3, а два пассивных сателлита 4 и 5 свои части мощности передают на водило 3 через трехпарное звено 6 и шатун 7, что позволяет этим сателлитам самоустанавливаться относительно колес 1 и 8.
Отсутствие избыточных связей и работоспособность такого механизма в отличие от прототипа доказывается формулой (1). В предлагаемом механизме число подвижных звеньев n=7: колеса 1, 2, 4, 5, водило 3, трехпарное звено 6 и шатун 7; число шарниров p5=7 - это соединения с опорой колеса 1 и водила 3, соединение колеса 2 с водилом 3, соединения колес 4 и 5 с трехпарным звеном 6, соединение звена 6 с шатуном 7, соединение шатуна 7 с водилом 3; число кинематических пар р4=6: контакты сателлитов 2, 4 и 5 соответственно с колесами 1 и 8. По формуле (1) имеем  , что доказывает работоспособность, безызбыточность предложенного самоустанавливающегося планетарного механизма.
, что доказывает работоспособность, безызбыточность предложенного самоустанавливающегося планетарного механизма.
Источники информации
1. Артоболевский И.И. Теория механизмов и машин. Изд. 3-е. - М.: Наука, 1975. - 640 с., ил.
2. Теория механизмов и машин: Учеб. для втузов / К.В.Фролов, С.А.Попов, А.К.Мусатов и др.; Под ред. К.В.Фролова. - М.: Высш. шк., 1987. - 496 с.: ил.
3. Строительная механика. Изд. 7-е, перераб. и доп. Под ред. А.В.Даркова. Учебник для вузов. - М.: "Высш. школа", 1976. - 600 с., ил.
4. Крайнев А.Ф. Механика машин. Фундаментальный словарь. - М.: Машиностроение, 2000. - 904 с., ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоустанавливающаяся пятисателлитная планетарная передача | 2015 |
|
RU2622731C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ТРЕХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2013 |
|
RU2541049C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2342573C1 |
| ЧЕТЫРЁХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2012 |
|
RU2499929C1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ПЯТИСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2018 |
|
RU2701296C1 |
| СПОСОБ СБОРКИ МНОГОСАТЕЛЛИТНОЙ УРАВНОВЕШЕННОЙ ПЛАНЕТАРНОЙ ПЕРЕДАЧИ | 2020 |
|
RU2728880C1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ШЕСТИСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2017 |
|
RU2662604C1 |
| УРАВНОВЕШЕННЫЙ САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2009 |
|
RU2397384C1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ЧЕТЫРЁХСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2015 |
|
RU2583320C1 |
| ОДНОСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2014 |
|
RU2576215C1 |
Изобретение предназначено для передачи вращательного движения. Самоустанавливающийся планетарный механизм содержит центральное подвижное колесо (1) с внешним зацеплением, неподвижное колесо (8) с внутренним зацеплением, водило (3), три сателлита (2, 4, 5). Основной сателлит (2) шарнирно соединен с водилом непосредственно. Два пассивных сателлита (4, 5) дополнительно соединены вращательными парами с трехпарным звеном (6), связанным с водилом через шатун (7). Изобретение позволяет обеспечить свободное, безызносное движение сателлитов, увеличить срок службы планетарного механизма и передавать мощность всеми сателлитами за все время работы механизма. 1 з.п. ф-лы, 1 ил.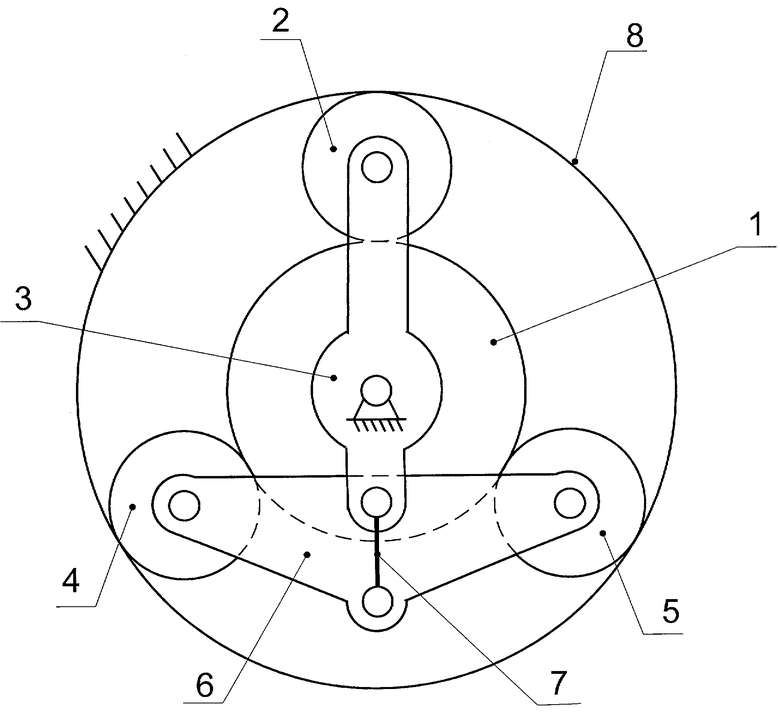
1. Самоустанавливающийся планетарный механизм, включающий центральное подвижное колесо с внешним зацеплением, неподвижное колесо с внутренним зацеплением, водило, три сателлита, один из которых, основной, соединен с водилом в шарнир непосредственно, отличающийся тем, что два пассивных сателлита дополнительно соединяются вращательными парами с трехпарным звеном, связанным с водилом через шатун.
2. Самоустанавливающийся планетарный механизм по п.1, отличающийся тем, что шатун выполняется в виде эксцентрика.
| САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2342573C1 |
| 1966 |
|
SU410192A1 | |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ РАЗДВИГАЕМОСТИ НИТЕЙ ТЕКСТИЛЬНЫХ МАТЕРИАЛОВ | 2013 |
|
RU2519028C1 |
| РЕШЕТОВ Л.Н | |||
| Самоустанавливающиеся механизмы | |||
| Справочник | |||
| - М.: Машиностроение, 1979, с.242-248, рис.5.11. | |||

