Изобретение относится к машиностроению, а конкретно, к планетарным передачам. Известны типовые схемы планетарных передач [1, стр. 500, рис. 24.2], в которых при заданном движении ведущему колесу сателлит обегает по неподвижному колесу и тем принуждает к определенному движению водило Н. Одним из недостатков таких механизмов является необходимость высокой точности изготовления сателлитов, способных передавать движение от ведущего колеса к водилу.
Наиболее близким к заявленному и принятому за прототип является четырехзвенный планетарный механизм [1 стр. 156, рис. 7.23], называемый планетарной передачей Джемса и содержащий в своем составе неподвижное колесо, центральное ведущее колесо, сателлит и водило Н. Недостаток конкретно этой передачи заключается в том, что при ее сборке после установки сателлита между центральными колесами положение геометрической оси центра сателлита становится строго определенным и возникает большая сложность в соединении этой оси с водилом. Малейшее различие в размерах звеньев не позволит механизм собрать воедино.
Задачей настоящего изобретения является исключить сложность в установке водила между его центром вращения и геометрической осью сателлита.
Сущность заявляемой односателлитной планетарной передачи заключается в том, что в предлагаемой односателлитной планетарной передаче, состоящей из ведущего центрального колеса, сателлита и водила, сателлит своей геометрической осью соединяется с водилом через дополнительный рычаг, при этом геометрическая ось соединения сателлита с дополнительным рычагом может быть выбрана на теле сателлита произвольно, включая геометрический центр сателлита
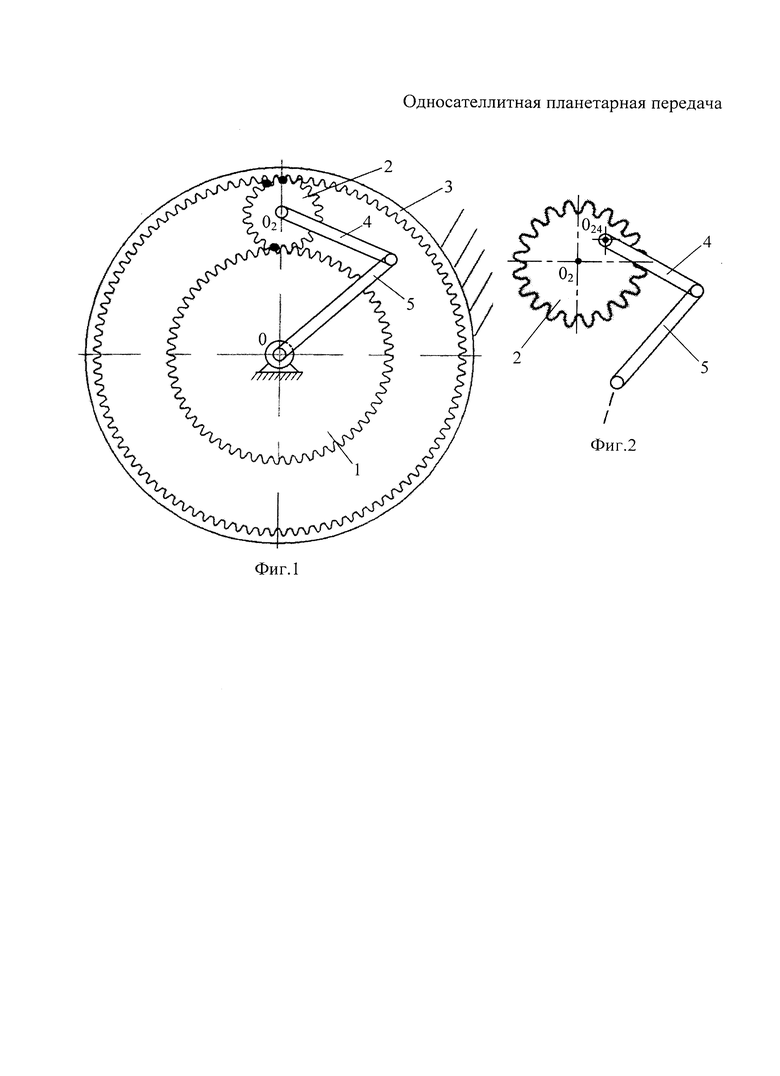
Предлагаемая планетарная передача приведена на фиг. 1, где показана односателлитная планетарная передача в сборе и фиг. 2 - фрагмент передачи, включающий сателлит с дополнительным рычагом и водилом при соединении дополнительного рычага с сателлитом в геометрической оси сателлита. Она состоит из ведущего центрального колеса 1 с опорой 0, сателлита 2 с геометрической осью 02 его центра, входящего в зацепление с ведущим колесом 1 и неподвижным колесом 3 с внутренним зацеплением, водила 5, вращающегося относительно опоры 0, и дополнительного рычага 4, входящего в шарниры - вращательные кинематические пары с сателлитом 2 через геометрическую ось соединения 024 и водилом 5.
Работает передача так: при задании движения (вращения) колесу 1 оно за счет зубчатого зацепления с сателлитом принуждает последний, отталкиваясь от зубьев неподвижного колеса 3, вполне определенно двигаться в плоскости передачи. Очевидность такого движения позволяет по известной формуле подвижности Чебышева П.Л. [1, стр. 40, формула (2.6)], имеющей вид

где W - подвижность передачи, т.е число задаваемых движений передаче, обеспечивающее вполне определенные движения всех звеньев,
n - число подвижных звеньев,
p5 - число одноподвижных кинематических пар - шарниров,
p4 - число двухподвижных (высших) кинематических пар - зацеплений,
утверждать, что в том случае, когда в рассматриваемой системе (фиг. 1) удалены рычаг 4 и водило 5, имеем число подвижных звеньев n=2 (звенья 1 и 2), число шарниров p5=1 (соединение ведущего звена со стойкой), а так как движение этой системы вполне определенное (что показано выше), то W=1. Подставив W=1, n=2 и p5=1 в (1), получим

Это означает, что всегда свободно установленный между центральным ведущим колесом 1 и неподвижным колесом 3 сателлит 2 соприкасается с зубьями колес 1 и 3 в трех точках. Иначе он там устойчиво расположиться не может. На фиг. 1 три соприкосновения зубьев колес 1,2 и 3 условно показаны тремя затемненными точками. С учетом этого эффекта (p4=3) весь предлагаемый механизм оказывается вполне работоспособным, т.к. в нем n=4 (колесо 1, сателлит 2, дополнительный рычаг 4 и водило 5), p5= 4 (шарнирные соединения звеньев 1 и 0, 2 и 4, 4 и 5, 5 и 0), p4=3 - по доказанному выше. Тогда в целом по (1) получим

т.е. достаточно задать движение ведущему колесу 1, чтобы все звенья механизма получили вполне определенные движения.
При этом геометрическая ось соединения сателлита 2 с дополнительным звеном 4 (024), может быть выбрана на теле сателлита произвольно, т.е. не обязательно на геометрической оси его центра 02, но, в частности, может соединяться и в геометрическом центре сателлита 2. При равномерном движении ведущего звена в случае соединения сателлита и дополнительного рычага в любой точке 024 движение водила окажется неравномерным. Если же геометрическая ось соединения сателлита 2 с дополнительным рычагом 4 окажется в геометрическом центре сателлита (как это показано на фиг. 1), то зависимое движение водила 5 будет равномерным.
Использованные источники
1. Артоболевский И.И. Теория механизмов и машин. М.: Издательство «Наука». Главная редакция физико-математической литературы 1988, 640 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СБОРКИ ЗУБЧАТЫХ ПЛАНЕТАРНЫХ ПЕРЕДАЧ | 2018 |
|
RU2711867C2 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2010 |
|
RU2419006C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2342573C1 |
| УРАВНОВЕШЕННЫЙ САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2009 |
|
RU2397384C1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ЧЕТЫРЁХСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2015 |
|
RU2583320C1 |
| БЕЗВОДИЛЬНАЯ ТРЕХСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2020 |
|
RU2736963C1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ПЯТИСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2018 |
|
RU2701296C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ТРЕХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2013 |
|
RU2541049C1 |
| СПОСОБ СБОРКИ МНОГОСАТЕЛЛИТНОЙ УРАВНОВЕШЕННОЙ ПЛАНЕТАРНОЙ ПЕРЕДАЧИ | 2020 |
|
RU2728880C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ ДЛЯ РЕАЛИЗАЦИИ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ РЫЧАГА | 2005 |
|
RU2285169C1 |
Изобретение относится к машиностроению, а именно к планетарным передачам. Односателлитная планетарная передача состоит из ведущего центрального колеса, сателлита и водила. Между сателлитом и водилом устанавливается дополнительный рычаг. Сателлит в этом случае опирается на центральное колесо и неподвижно в трех точках. Соединение дополнительного рычага с сателлитом может осуществляться как в геометрической оси сателлита, так и в любой другой точке сателлита. В результате упрощается установка водила между центром его вращения и геометрической осью сателлита. 2 ил.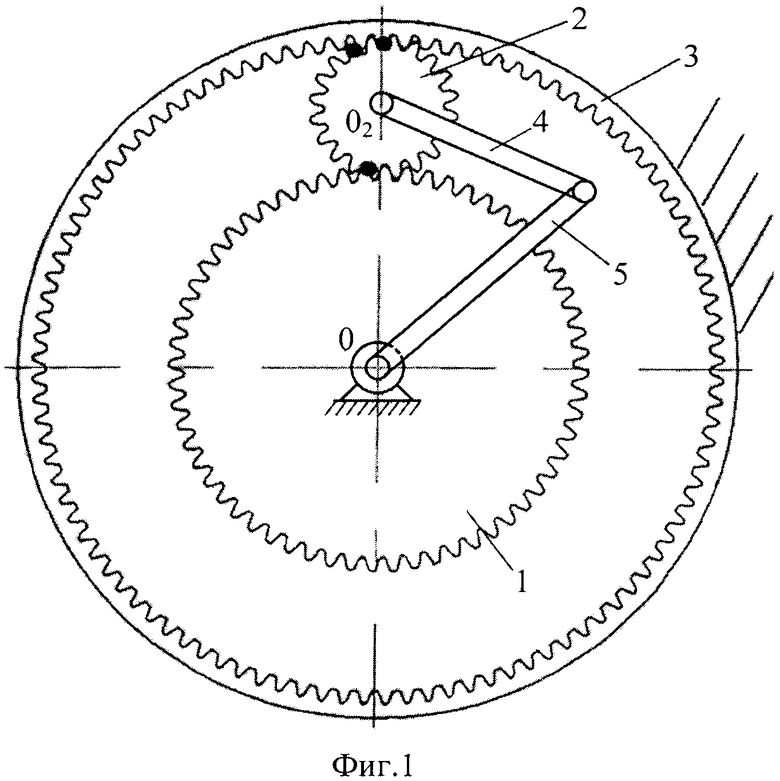
Односателлитная планетарная передача, состоящая из ведущего центрального колеса, сателлита и водила, отличающаяся тем, что сателлит геометрической осью соединен с водилом через дополнительный рычаг, при этом геометрическая ось соединения сателлита с дополнительным рычагом может быть выбрана на теле сателлита произвольно, включая геометрический центр сателлита.
| Импульсный планетарный механизм | 1986 |
|
SU1379540A1 |
| Устройство снижения обратных потоков энергии | 1987 |
|
SU1457062A1 |
| УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) | 2006 |
|
RU2307278C1 |
| Преобразователь равномерного вращения в неравномерное | 1984 |
|
SU1186297A1 |
| МЕХАНИЗМ БЕССТУПЕНЧАТОЙ ПЛАНЕТАРНОЙ ПЕРЕДАЧИ | 2006 |
|
RU2319873C1 |
| ДИСКОВЫЙ ПЛАНЕТАРНЫЙ ВАРИАТОР | 2008 |
|
RU2357139C1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

