Изобретение относится к машиностроению, а конкретнее, к зубчатым планетарным механизмам, в которых одно из центральных колес неподвижно, а сателлиты имеют подвижные геометрические оси.
Известен планетарный механизм с тремя сателлитами [1, стр.502, рис.24.3]. Три сателлита, устанавливаемые под равными углами относительно общей геометрической оси вращения, компенсируют инерционные силы друг друга и уравновешивают весь механизм. Кроме того, они позволяют разделить потоки мощности от ведущего колеса к водилу, что уменьшает усилия в соединениях ведущего колеса с каждым из сателлитов и каждого из сателлитов с водилом. При этом один из сателлитов является основным, а два других - дополнительными. Этот механизм примем за аналог.
Однако такому планетарному механизму с тремя сателлитами присущ серьезный недостаток. В этом механизме число подвижных звеньев n=5 (ведущее звено - 1, водило - 3 и три сателлита - 2, 5, 6), число одноподвижных вращательных кинематических пар р5=5 (а именно, соединения ведущего колеса со стойкой, трижды сателлитов с водилом и водила со стойкой), число двухподвижных кинематических пар р4=6 (по два соединения зубьев трех сателлитов соответственно с ведущим звеном и неподвижным колесом). По формуле Чебышева П.Л. [1, стр.38, формула (2.5)] подвижность такого планетарного механизма равна
W=3n-2p5-p4=15-10-6=-1.
Такой результат свидетельствует о неработоспособности трехсателлитного механизма. Такие системы относят к статически неопределимым [2, стр.269]. В теории машин такой результат объясняют наличием так называемых избыточных связей [3, стр.224]. О том что в планетарном механизме с тремя сателлитами имеются избыточные связи, указывается в [4, стр.408]. Если механизм с избыточными связями насильно принудить к движению, то это, во-первых, приводит к большим потерям на трение, а значит, к низкому коэффициенту полезного действия, а во-вторых, к неизбежному износу звеньев в местах лишних связей - контактов. В практике это ведет к быстрому износу зубьев сателлитов, к потери их контактов с ведущим звеном и к передаче мощности лишь через один - основной - сателлит, то есть два дополнительных сателлита начинают свободно вращаться, не передавая мощности.
Наиболее близким к предлагаемому изобретению является самоустанавливающийся планетарный механизм [5]. В нем избыточные связи устранены за счет свободной установки относительно водила двух из трех сателлитов трехсателлитного планетарного механизма через посредство дополнительных шатунов, связанных в шарниры как с водилом, так и с сателлитами.
Однако и этому механизму, принятому за прототип, присущ серьезный недостаток, заключающийся в том, что в зависимости от длин шатунов, связывающих оси, положения сателлитов могут оказаться неуравновешенными, и в механизме появятся дополнительные динамические нагрузки от сил инерции сателлитов. Динамические нагрузки, возникающие при движении механизма, являются источниками дополнительных сил трения в кинематических парах, вибраций, дополнительных напряжений в некоторых звеньях механизма, причиной шума и т.д. [1, стр.275].
Задачей изобретения является, в частности, уравновешивание сил инерции сателлитов планетарного механизма. Для этого необходимо максимальным образом приблизить центры вращения дополнительных сателлитов к центрам вращения связывающих их шатунов с водилом. Указанное расстояние не может быть нулевым, так как в этом случае рассматриваемый механизм вырождается в аналог.
Сущность изобретения заключается в том, что предлагается уравновешенный самоустанавливающийся планетарный механизм, включающий центральное подвижное колесо с внешним зацеплением, неподвижное колесо с внутренним зацеплением, водило, три установленных под равными углами относительно общей геометрической оси вращения сателлита, один из которых - основной - соединен с водилом в шарнир непосредственно, а два дополнительных сателлита соединены с водилом через посредство эксцентриковых осей с двумя опорными цилиндрическими поверхностями, взаимодействующими соответственно с водилом и сателлитом, при этом эксцентриситет эксцентриковых осей принимается не менее половины модуля зацепления колес планетарного механизма.
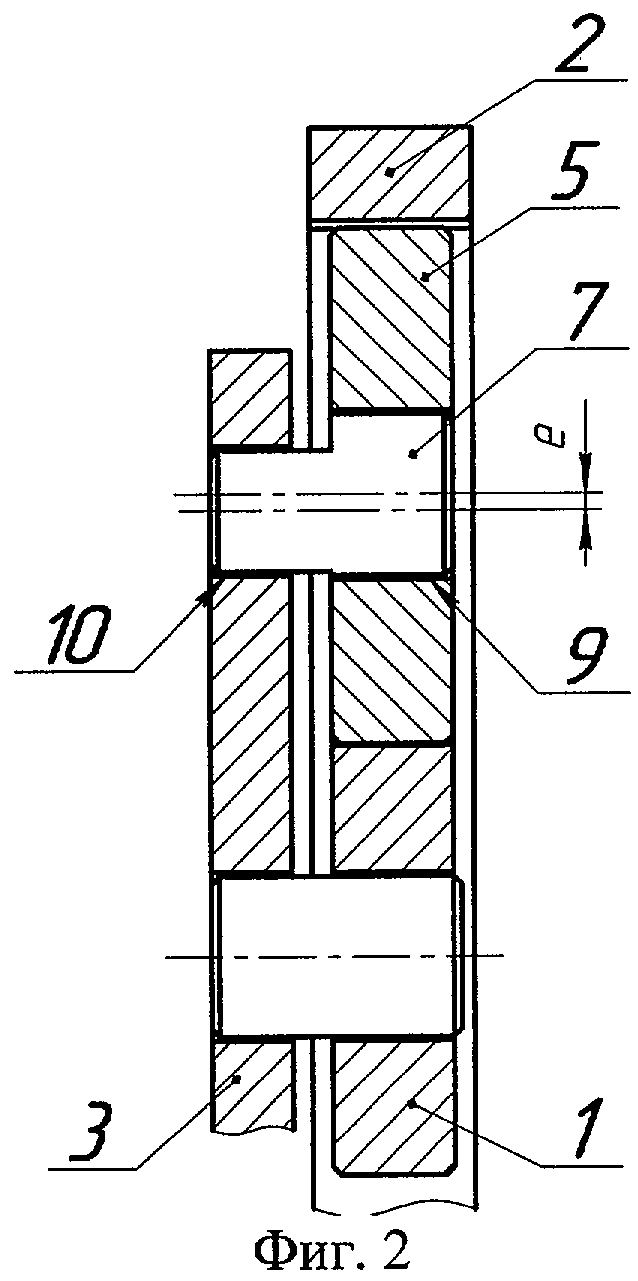
На чертежах показан предлагаемый уравновешенный самоустанавливающийся планетарный механизм: на фиг.1 - общий вид механизма и на фиг.2 - сечение механизма по линии А-А. Механизм включает в себя: 1 - центральное подвижное колесо с внешним зацеплением; 2 - неподвижное колесо с внутренним зацеплением; 3 - водило; 4, 5, 6 - три установленных под равными углами относительно общей геометрической оси вращения сателлита, один из которых 4 - основной - соединен с водилом 3 в шарнир непосредственно, а два дополнительных сателлита 5 и 6 соединяются с водилом 3 через посредство эксцентриковых осей 7 и 8, обеспечивающих величину эксцентриситета е не менее половины модуля зацепления.
Под осью в данном случае понимается деталь машины в строгом соответствии с определением оси как детали, приведенном в [6, стр.958]. Упомянутые оси входят во вращательные кинематические пары с водилом 3 и с дополнительными сателлитами 5 и 6. Отличие осей 7 и 8 от обычных осей заключается в том, что геометрические оси соединений с сателлитами и с водилом (под геометрическими осями понимаются оси симметрии в математическом смысле, как это объяснено в [6, стр.958] в статье, приведенной после статьи об оси как детали машины) выполнены с некоторым эксцентриситетом относительно друг друга. Этот эксцентриситет геометрических осей позволяет дополнительным сателлитам иметь возможность смещаться в радиальном направлении от неподвижных колес. При этом не должно происходить события, при котором сателлит мог бы выйти из зацепления с ведущим колесом и неподвижным. Этого не произойдет, если эксцентриситет геометрических осей деталей 7 и 8 будет ограничен по величине. Можно гарантировать, что сателлит не выйдет из зацепления, если принятый эксцентриситет осей будет более половины модуля зацепления, то есть половины высоты зуба.
Работает механизм следующим образом. При приведении в движение центрального подвижного колеса 1 за счет зацепления с ним приходят в движение все три сателлита 4, 5 и 6. Во время движения сателлиты 5 и 6 имеют возможность самоустанавливаться за счет эксцентриковых осей 7 и 8. Одна из эксцентриковых осей 7 опорной поверхностью 9 взаимодействует с сателлитом 5, а опорной поверхностью 10 с водилом 3. Эксцентриковая ось 7 позволяет сателлиту 5 на опоре 9 провернуться относительно водила 3, при этом произойдет смещение оси сателлита относительно оси водила на величину, лежащую в пределах величины эксцентриситета е, которая назначается не менее половины модуля зацепления. Аналогичным образом происходит взаимодействие эксцентриковой оси 8 с сателлитом 6 и водилом 3.
В результате возможности самоустановления дополнительных сателлитов, а также максимального приближения центров вращения этих сателлитов и центров вращения связывающих их эксцентриковых осей с водилом происходит уравновешивание сил инерции предложенного планетарного механизма, который будет самоустанавливающимся и уравновешенным.
Источники информации
1. Артоболевский И.И. Теория механизмов и машин: Учеб. для втузов. - 4-е изд., перераб. и доп. - М.: Наука. Гл. ред. физ.-мат. лит., 1988. - 640 с.
2. Строительная механика. Изд. 7-е, перераб. и доп. Под ред. А.В.Даркова. Учебник для вузов. - М.: Высш. школа, 1976. - 600 с., ил.
3. Крайнов А.Ф. Механика машин. Фундаментальный словарь. - М.: Машиностроение, 2000. - 904 с., ил.
4. Теория механизмов и машин: Учеб. для втузов / К.В. Фролов, С.А. Попов, А.К. Мусатов и др. Под ред. К.В. Фролова. - М.: Высш. шк., 1987. - 496 с., ил.
5. Патент RU 2342573 С1, МПК8 F16H 1/48, заявленный 11.07.2007.
6. Советский энциклопедический словарь. - М.: Советская энциклопедия, 1981.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2010 |
|
RU2419006C1 |
| СПОСОБ СБОРКИ МНОГОСАТЕЛЛИТНОЙ УРАВНОВЕШЕННОЙ ПЛАНЕТАРНОЙ ПЕРЕДАЧИ | 2020 |
|
RU2728880C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2342573C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ТРЕХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2013 |
|
RU2541049C1 |
| СПОСОБ СБОРКИ ЗУБЧАТЫХ ПЛАНЕТАРНЫХ ПЕРЕДАЧ | 2018 |
|
RU2711867C2 |
| БЕЗВОДИЛЬНАЯ ТРЕХСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2020 |
|
RU2736963C1 |
| ОДНОСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2014 |
|
RU2576215C1 |
| ДВУХЪЯРУСНЫЙ ЭКСЦЕНТРИКОВЫЙ САМОУСТАНАВЛИВАЮЩИЙСЯ РАДИАЛЬНЫЙ ПОДШИПНИК КАЧЕНИЯ | 2011 |
|
RU2450177C1 |
| Уравновешенный самоустанавливающийся планетарный механизм | 2024 |
|
RU2837603C1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ЧЕТЫРЁХСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2015 |
|
RU2583320C1 |
Изобретение предназначено для передачи вращательного движения. Уравновешенный самоустанавливающийся планетарный механизм содержит центральное подвижное колесо (1) с внешним зацеплением, неподвижное колесо (2) с внутренним зацеплением, водило (3), три сателлита (4, 5, 6), установленных под равными углами относительно общей геометрической оси вращения, один из которых - основной (4) - соединен с водилом (3) в шарнир непосредственно, а два дополнительных сателлита (5, 6) соединены с водилом посредством эксцентриков, обеспечивающих величину эксцентриситета не менее половины модуля зацепления колес планетарного механизма. Изобретение позволяет увеличить срок службы планетарного механизма за счет уравновешивания сил инерции сателлитов и возможности передавать мощность всеми сателлитами за все время работы механизма. 2 ил.
Уравновешенный самоустанавливающийся планетарный механизм, включающий центральное подвижное колесо с внешним зацеплением, неподвижное колесо с внутренним зацеплением, водило, три установленные под равными углами относительно общей геометрической оси вращения сателлита, один из которых - основной соединен с водилом в шарнир непосредственно, отличающийся тем, что два дополнительных сателлита соединены с водилом через посредство эксцентриковых осей с двумя опорными цилиндрическими поверхностями, взаимодействующими соответственно с водилом и с сателлитом, при этом эксцентриситет эксцентриковых осей выбран не менее половины модуля зацепления колес планетарного механизма.
| Планетарная зубчатая передача | 1987 |
|
SU1504421A1 |
| Планетарная передача | 1987 |
|
SU1732084A1 |
| US 3635103 А, 18.01.1972 | |||
| УСТРОЙСТВО ДЛЯ УМЯГЧЕНИЯ ВОДЫ | 2000 |
|
RU2166690C1 |

